24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
為了適應并逐步走上工業(yè) 4.0 的發(fā)展方向,為了降低人力成本,改善一線(xiàn)工人 的勞動(dòng)條件,提升工作效率,將工人從高強度的和危險的工作環(huán)境中解放出來(lái), 可以去從事其他研究工作,本文研究了用機器手替代人工實(shí)現批量焊接。
本文以富士康的成品六軸機器人作為基礎,利用機器視覺(jué)進(jìn)行輔助,使機械 手實(shí)現自動(dòng)焊接為研究課題,重點(diǎn)研究了機械手在現實(shí)生產(chǎn)中的應用、機器視覺(jué) 的運用以及圖像處理等。本文采用的六軸 FOXBOT 機器人,考慮了焊接需求,精 度及運行效率等方面。使用可擴展的遠程 I/O,依實(shí)際焊接需求設計外圍設備的接 口電路。機器人采用 Cypress Enable 編輯器,使用 VB 的編輯語(yǔ)言,語(yǔ)法簡(jiǎn)單,減 低系統開(kāi)發(fā)難度,使系統集成更簡(jiǎn)單。在焊接方式上我們采用了非融化氬弧焊的 方式,避免了送絲機構的設計。在對機構件實(shí)施批量焊接時(shí),可以通過(guò)機器人對 焊槍的位置進(jìn)行記憶并多次重復的執行同一位置的焊縫焊接動(dòng)作,在批量生產(chǎn)時(shí) 更具穩定性。用機器視覺(jué)來(lái)替代人工可以很大程度上提升效率和生產(chǎn)的品質(zhì)。本 文采用 500 萬(wàn)像素的智能相機,引入像素標定和模板創(chuàng )建匹配功能,可精確追蹤 焊縫位置。并與標定位置進(jìn)行實(shí)時(shí)比對,將偏差實(shí)時(shí)輸送給主機,機器人同步收 到主機信號后,對焊接路徑及時(shí)調整,保證大量生產(chǎn)時(shí)的焊接品質(zhì)。
本文將工業(yè)機器手和機器視覺(jué)通過(guò) IP 協(xié)議通信連接,實(shí)現了焊縫精準追蹤, 位置偏差自動(dòng)調整,無(wú)需人操作的機器手自動(dòng)化焊接,且焊接的產(chǎn)品質(zhì)量符合批 量生產(chǎn)的要求。
關(guān)鍵詞:工業(yè)機器人,機器視覺(jué),氬弧焊,TCP/IP 協(xié)議通信

ABSTRACT
In order to adapt and gradually enter the development direction of industry 4.0, in order to reduce the labor costs, improve the working conditions of front-line workers, and improve work efficiency, freeing workers from high-intensity and dangerous working environments, and can engage in other research work, The thesis study the replacement of manual welding by robotic arm to achieve mass productivity.
This thesis takes Foxconn`s finished six-axis robot as the basis, and with the assistant of machine vision, so that the robotic arm realizes automatic welding as the research topic. It focuses on the application of the robotic arm in real production, the use of machine vision and image process. The six-axis FOXBOT robot used in this thesis considers welding requirements, accuracy, and operating efficiency, etc. Uses scalable remote I/O, and designs interface circuits for peripheral devices according to actual welding requirements. The robot uses the Cypress Enable editor and uses VB Editing language, simple syntax, reducing system development difficulty and making system integration easier. In the welding method, we adopted a non-melting argon arc welding method to avoid the design of the wire feeding mechanism. When performing batch welding on mechanical parts, the position of the welding gun can be memorized by the robot and the same position can be performed repeatedly. The welding action is more stable in mass production. Using machine vision detection methods can greatly improve production efficiency and production quality. The promotion of uses a 5-megapixel smart camera, and introduces pixel calibration and template reaction matching functions to accurately track the position of the weld and compare it with the calibration position in real time. The deviation is transmitted to the host in real time. The welding path is adjusted in time to ensure the welding quality during mass production.
This thesis connects industrial robots and machine vision through IP protocol communication to achieve precise welding follow-up and position adjustment and automatic welding without human operation to meet the quality requirement for mass productivity.
Keywords: industrial robot, machine vision, argon arc welding, TCP/IP protocol communication
目 錄
第一章 緒 論
1.1 研究工作的背景與意義
隨著(zhù)人力成本不斷上升,人類(lèi)需要擺脫對密集勞動(dòng)力、流水在線(xiàn)做枯燥的工 作、追求生活質(zhì)量的意愿不斷上升,造成制造企業(yè)巨大的壓力。東南亞、非州等 經(jīng)濟欠發(fā)達國家依賴(lài)低成本的人力資源,對我國的勞動(dòng)密集型產(chǎn)業(yè)形成巨大競爭; 隨著(zhù)我國科學(xué)技術(shù)雖不斷發(fā)展,但在應用科學(xué)方面,還缺乏大量高素質(zhì)的技 術(shù)人員去推動(dòng)最新科學(xué)成果應用到我們的生產(chǎn)實(shí)踐當中。我選擇"機器人自動(dòng)焊接 引導系統"作為研究方向,希望能推動(dòng)跨學(xué)科,多領(lǐng)域的技術(shù)結合,利用機器視覺(jué) 與機械手的結合解決自動(dòng)化生產(chǎn)的實(shí)際問(wèn)題。
1.2 自動(dòng)焊接技術(shù)的國內外研究動(dòng)態(tài)
隨著(zhù)全球制造業(yè)的發(fā)展,智能制造的需求使得傳統的手工焊已不能滿(mǎn)足現代 制造的要求,比如在產(chǎn)品的質(zhì)量上,以前的產(chǎn)品公差符合 0.10mm 內就不錯,現在 的產(chǎn)品要求很多是要符合正負 0.03mm 才合格,在數量上現在每天需求是幾萬(wàn)甚至 幾十萬(wàn)個(gè),手工制作無(wú)法滿(mǎn)足。焊接工藝正在朝智能自動(dòng)化的方向邁進(jìn)。機器視 覺(jué)結合工業(yè)機器人以及計算機技術(shù)的突飛猛進(jìn),為焊接的自動(dòng)化提供了十分便利 的前提條件。自動(dòng)化焊接技術(shù)及其發(fā)展的概況與前景分析如下:
1.2.1 自動(dòng)化焊接的發(fā)展
自動(dòng)化焊接主要指焊接生產(chǎn)的整個(gè)過(guò)程的無(wú)人化。即用機器替代人的動(dòng)作。 它是一個(gè)綜合性的焊接與工藝問(wèn)題,其主要工作是:在采用先進(jìn)的裝夾定位方式、 焊接工藝的基礎上,建立不需要人直接參與焊接過(guò)程的焊接加工工藝流程。焊接 自動(dòng)化的最終目標是實(shí)現沒(méi)有人直接參與的自動(dòng)化焊接全過(guò)程,將人從危險的工 作環(huán)境中解放出來(lái)。 我國的焊接自動(dòng)化的發(fā)展及應用起步都很晚。50 年代的時(shí)候, 研制自動(dòng)焊接 設備以及開(kāi)始發(fā)展焊接自動(dòng)化技術(shù)是從一批大型國有企業(yè)開(kāi)始的。隨著(zhù)各個(gè)領(lǐng)域 的技術(shù)進(jìn)步和我國工業(yè)現代化的整體向前推進(jìn), 我國的焊接自動(dòng)化的技術(shù)水平隨 著(zhù)水漲船高, 60 多年來(lái)已取得了巨大的進(jìn)步。 現代自動(dòng)化技術(shù)主要通過(guò)機器人、 計算機電子技術(shù)等硬件以及互聯(lián)網(wǎng)通訊協(xié)議和算法等軟體來(lái)實(shí)現。近年來(lái),焊接 自動(dòng)化在實(shí)際生產(chǎn)中的應用取得了迅速發(fā)展,比如富士康的平板機殼生產(chǎn)中的焊接工藝,就是利用工業(yè)機器人、激光焊接以及 CCD 機器視覺(jué)來(lái)實(shí)現的。它已成為 先進(jìn)智能制造的重要組成部分。 隨著(zhù)人口老齡化及用工越來(lái)越來(lái)難得形勢,以及社會(huì )發(fā)展進(jìn)步的需要,現代 工業(yè)企業(yè)必須走自動(dòng)焊接才有出路,焊接其實(shí)是整個(gè)生產(chǎn)中的一環(huán),依我們公司 為例,我們有激光焊、電阻焊,當然也有氬弧焊。目前我們是機器人加 CCD 拍照 技術(shù)實(shí)現了自動(dòng)無(wú)人焊接生產(chǎn),焊接后的外觀(guān)檢測目前還沒(méi)實(shí)現自動(dòng)化,但我相 信今年應該就可實(shí)現焊接及檢測自動(dòng)一體化的生產(chǎn)。
目前在焊接設備上,企業(yè)大 力發(fā)展微機控制自動(dòng)化技術(shù),全自動(dòng)智能焊機、柔性機器人焊接標準模組,便于生 產(chǎn)的快速切換生產(chǎn),因為現代生產(chǎn)很多時(shí)候是少量多機種,所以柔性快速切換能 力是企業(yè)接到更多訂單的競爭力體現, 而且為了降低陳本, 必須實(shí)現無(wú)人操作, 即 實(shí)現焊接生產(chǎn)數控化、自動(dòng)化與智能化。 工業(yè)發(fā)達國家現在已大量使用焊接機器人來(lái)進(jìn)行自動(dòng)化焊接生產(chǎn),但在在焊 接生產(chǎn)中我們經(jīng)常需要根據產(chǎn)品的不同結構來(lái)設計與制造焊接的裝夾治具, 如焊 接生產(chǎn)線(xiàn)、焊接中心等自制的成套焊接設備,但是裝夾治具設計的好壞及加工精度 直接影響焊接的品質(zhì), 且裝夾治具設計的便利性會(huì )決定是否便于批量生產(chǎn), 形成 規模效益, 這樣企業(yè)才可能持續經(jīng)營(yíng)發(fā)展。所以治具的模塊化,系列化、多功能化、 等就成了設計的方向和必由之路。再有我們選用不同型號大小及功能的機器人搭 配多功能夾具可很好的解決現代生產(chǎn)多樣少量的實(shí)際問(wèn)題。
1.2.2 機器視覺(jué)在焊接中的應用
隨著(zhù)焊接自動(dòng)化技術(shù)的飛速發(fā)展,能夠實(shí)現焊接路徑自動(dòng)規劃、實(shí)時(shí)自動(dòng)校 正路徑及焊縫跟蹤、焊接熔深、熔透以及焊縫成形等質(zhì)量控制功能的焊接機器人 及其智能化技術(shù),已成為焊接工藝技術(shù)發(fā)展的新方向。 焊縫寬度以及熔寬、熔池深度等尺寸參數是影響焊接質(zhì)量的最關(guān)鍵因素,熔 池作為影響焊接質(zhì)量的最直接因子,控制熔池相關(guān)參數及變化狀況,對控制焊接 質(zhì)量的穩定性和持續性有重要意義[1],根據實(shí)際生產(chǎn)經(jīng)驗及產(chǎn)品實(shí)際狀況,焊工往 往根據熔池的變化調整焊接工藝規范和焊槍姿態(tài),以確保焊接質(zhì)量。可見(jiàn),根據 焊接熔池變化控制焊接質(zhì)量是實(shí)現焊接智能化的一個(gè)重要組成部分[2].
21 世紀以來(lái),特別是近十多年來(lái),隨著(zhù)機器視覺(jué)技術(shù)的發(fā)展,利用機器視覺(jué) 直接觀(guān)察并抓取焊縫的位置和尺寸大小,分析焊接質(zhì)量,獲得自動(dòng)焊接路徑,通 過(guò)與標定位置比對,計算器能將位置誤差實(shí)時(shí)傳輸給機器人,機器人會(huì )對焊接路 勁做出調整,實(shí)現焊縫精確追蹤,獲得高質(zhì)量的焊接產(chǎn)品,并進(jìn)行閉環(huán)控制,己 成為焊接智能化領(lǐng)域的重要研究方向。
目前,將機器視覺(jué)技術(shù)應用于焊接機器人焊縫的檢測已經(jīng)成為了國內外焊接 工作者一個(gè)研究熱點(diǎn),是焊接智能化的一個(gè)關(guān)鍵環(huán)節。原理是利用多種視覺(jué)傳感 對焊縫的形狀進(jìn)行數據收集及數據分析,從而得到焊縫的形狀、尺寸等信息,然 后將這些信息傳送到機器人的主機,為機器人自主焊提供數據支持。上海交通大 學(xué)的孫大偉等人將機械手、投影儀和上位機、CCD 攝像機等結合,利用安裝在機 器人上的傳感器對焊縫進(jìn)行測量。由投影儀向焊縫位置投射彩色圖像和空白圖像, 利用空白圖像補償彩色,減少或者消除對象表面紋理對光的影響,用補償的圖像 恢復焊縫的 3D 信息,然后用幾何的方法來(lái)得出焊縫的尺寸,實(shí)現對焊縫的檢測[3]. 高向東等人通過(guò)提取弧焊熔池的中心來(lái)描述焊縫的特征矢量,建立圖像質(zhì)心狀態(tài) 和測量方程,同時(shí)采用卡爾曼濾波的方法來(lái)減少系統受到噪聲等干擾而出現的測 量偏差,得到最優(yōu)估計值,達到對焊縫位置精確測量的目的。華南理工大學(xué)的師 生結合自適應控制的理論,利用 CCD 拍照對焊縫進(jìn)行測量,并實(shí)時(shí)調整偏差,實(shí) 現了對焊縫的精確定位[3].
富士康等公司利用機器視覺(jué)先對焊接工件的某個(gè)基準進(jìn) 行拍照定位,通過(guò)工控機計算與標準之間的差異,反饋并調整焊接坐標,實(shí)現穩 定性好的平板計算機等電子產(chǎn)品的批量生產(chǎn)。甄恒洲等人利用激光視覺(jué)構建測量 系統,將焊接頭同激光傳感器連接,根據三角測量原理,對激光條紋在焊縫曲面 上的截交線(xiàn)進(jìn)行檢測,到達了對復雜焊縫進(jìn)行精確追蹤的目的。國外一些學(xué)者針 對需要進(jìn)行高速焊接的環(huán)境研究了一種多激光視覺(jué)傳感器,實(shí)現了對焊縫的檢測 與定位,根據單條激光條紋測量原理,同時(shí)對圖像中的多條激光條紋進(jìn)行采樣測 量,從而定位焊縫,得到坐標和尺寸[3].
1.3 本文的主要貢獻與創(chuàng )新
本文以富士康的成品六軸機器人作為基礎,利用機器視覺(jué)的輔助效果,使機 械手實(shí)現自動(dòng)焊接為研究課題,重點(diǎn)研究了機械手在現實(shí)生產(chǎn)中的應用、機器視 覺(jué)的運用以及圖像處理等內容,提高了生產(chǎn)過(guò)程中的自動(dòng)化程度,改善勞動(dòng)條件, 避免人身事故,減少了人力,降低了生產(chǎn)成本,并便于有節奏的持續性生產(chǎn)。 主要創(chuàng )新點(diǎn)與貢獻如下: 在目前的汽車(chē)和船舶工業(yè)中,使用機械手自動(dòng)焊接更多的是使用多個(gè)位置的 點(diǎn)焊,使機械手在多個(gè)固定位置實(shí)現點(diǎn)焊。而本文的創(chuàng )新點(diǎn)在于將多個(gè)位置的點(diǎn) 焊通過(guò)機器視覺(jué)的輔助功能將點(diǎn)轉換為一條線(xiàn),實(shí)現一條或者多條焊縫的連續性 焊接,在盡可能適應批量性的焊接狀態(tài)下,嘗試實(shí)現對形狀大小相近的工件都能 實(shí)現高穩定性高質(zhì)量的縫焊焊接。
1.4 本論文的結構安排如下:
第一章:緒論 本章對本論文的背景和意義以及自動(dòng)化焊接技術(shù)的國內外的動(dòng)態(tài)做了說(shuō)明, 對本文的貢獻與創(chuàng )新做了簡(jiǎn)述。
第二章:需求分析與總體設計 分別對機器人、焊槍、機器視覺(jué)硬件的需求及硬件和軟件的總體設計做了概 括說(shuō)明。
第三章:系統關(guān)鍵技術(shù)要點(diǎn) 對實(shí)現自動(dòng)焊接機器手的關(guān)鍵技術(shù)做了說(shuō)明。 第四章:自動(dòng)焊接機械手的硬件設計與實(shí)現 此章是自動(dòng)焊接的硬件設計,先對整個(gè)架構做示意說(shuō)明,然后分別從主機的 配置,機器視覺(jué)的工作原理及系統構成,機械手端的選擇和電路設計做了詳細的 展開(kāi),最后設計了樣品的定位夾具。
第五章:自動(dòng)焊接機械手的軟件設計與實(shí)現 此章是自動(dòng)焊接的軟件設計,先對整個(gè)軟件設計思路做簡(jiǎn)要說(shuō)明,然后主要 對相機的程序和機器手端的程序展開(kāi)設計,并對如何實(shí)現自動(dòng)調整偏移量做了流 程圖的詳細描述。
第六章:機械手自動(dòng)焊接系統的調試 軟件和硬件都設計好后,就是現場(chǎng)調試工作,先是對聯(lián)機和調試步驟示意說(shuō) 明,然后對調試過(guò)程中出現的問(wèn)題給出了解決方法,最后是焊接樣品的展示。
第七章:全文總結與展望 整個(gè)設計及實(shí)現的過(guò)程中的缺失和收獲,對后續研究工作做了展望。

第二章 需求分析與總體設計
2.1 需求分析
2.1.1 機器人需求分析
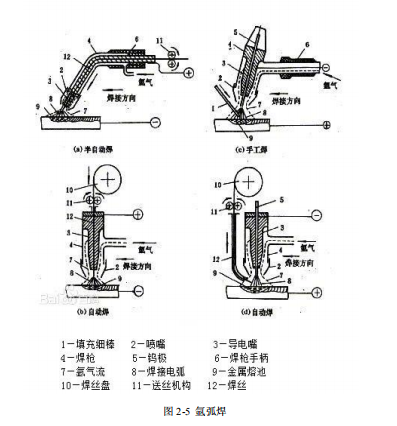
2.1.2 焊槍的需求分析
2.1.3 機器視覺(jué)的需求分析
2.1.4 通訊的需求分析
2.2 硬件總體設計
2.3 軟件總體設計
2.4 設計的功能和性能分析
2.5 本章小結
第三章 系統關(guān)鍵技術(shù)要點(diǎn)
3.1 一個(gè)典型的自動(dòng)控制系統--伺服控制系統
3.1.1 伺服控制系統的一般構成
3.1.2 伺服控制系統的技術(shù)要求
3.1.3 伺服控制系統的執行組件
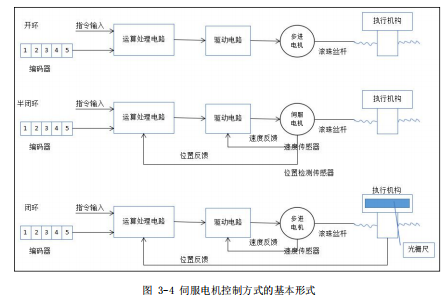
3.1.4 伺服電機控制方式的基本形式
3.1.5 伺服電機的控制模式
3.1.6 基于整個(gè)機械手焊接系統的自動(dòng)控制
3.2 圖像處理之模板匹配
3.2.1 模板匹配的幾種常用方法
3.2.2 基于形狀的模板匹配建模過(guò)程
3.2.3 仿射變換
第四章 自動(dòng)焊接機械手的硬件設計與實(shí)現
4.1 主機端
4.1.1 推薦主機基本配置
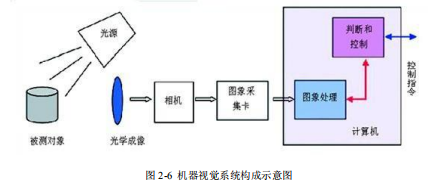
4.2 機器視覺(jué)端
4.2.1 相機的工作原理
4.2.2 機器視覺(jué)系統
4.3 機械手端
4.3.1 機器人(機械手)的選擇
4.3.2 機器人的電路設計
4.4 機構設計端
4.5 本章小結
第五章 自動(dòng)焊接機械手的軟件設計與實(shí)現
5.1 主機相機端的程序設計
5.1.1 連接相機
5.1.2 編寫(xiě)程序
5.2 機械手端的程序設計
5.2.1 FOXBOT 機器人編程環(huán)境簡(jiǎn)介
5.2.2 FOXBOT 機器人操作安全
5.2.3 手動(dòng)操作 FOXBOT 機器人
5.2.4 機器人軟件編程
5.3 程序主流程
5.3.1 主程序說(shuō)明
5.4 本章小結
第六章 自動(dòng)焊接機械手系統的調試
6.1 系統調試流程
6.1.1 調試流程
6.2 主機端的程序流程
6.2.1 相機圖像處理準備
6.3 機械手端的程序流程
6.3.1 機械手動(dòng)作前準備
6.4 焊接效果
6.5 本章小結
第七章 全文總結與展望
7.1 全文總結
通過(guò)對本項目設計、調試運行及驗證,收獲頗多: 首先,從前期設計上來(lái)看,由于前期的考慮不夠周到,走了很多的彎路。包 括相機的選型及相關(guān)圖像處理的知識儲備不足,導致在如何將各個(gè)工件的細微定 位差異反饋給機器人的問(wèn)題上一度躊躇不前。在后續的設計與開(kāi)發(fā)中,若知識儲 備足夠,完全可以直接采用工業(yè)相機拍照,使用工控機的強大數據處理能力來(lái)處 理圖像,這不僅可以節省處理時(shí)間,在一定程度上還可以節省成本。
其次,在調試過(guò)程中發(fā)現,圖像遠端背景為金屬色,與近端特征的顏色反差 較小,導致在拍攝的圖片中可能造成圖片處理無(wú)法識別到工件邊界和焊縫。因條 件限制,同軸光源的使用在某些特殊狀態(tài)下并不能將焊縫體現出來(lái),由此來(lái)看針 對不同邊界的焊縫可能采取不同方向上的條形光源可能對焊縫的展示及工件邊界 會(huì )有更佳的表現。
再次,機械手對焊點(diǎn)的確定(學(xué)習)過(guò)程較為復雜,本身的定位精度有限, 如果工件之間的差異較大時(shí)(尤其是 Z 方向上),可能會(huì )有撞針的風(fēng)險,也可能 會(huì )因為新工件的高度距離工件過(guò)遠導致無(wú)法觸發(fā)焊接。由于相機是固定在機械手 上的,由于機械手的震動(dòng),可能會(huì )導致相機本身在一定程度上會(huì )有微小的位移, 這就給整個(gè)系統的重復性操作帶來(lái)了挑戰。后續有考慮先將所有的圖片拍攝完成 后再實(shí)施焊接動(dòng)作,結果對焊點(diǎn)的定位精準度有了稍微的提升,但是整個(gè)運行時(shí) 間卻是大大提升了,影響了整個(gè)系統的工作效率。從調試情況來(lái)看,若不考慮成 本,采用多個(gè)相機固定在機械手的工作范圍之外,對工件進(jìn)行多個(gè)角度的拍攝, 將工件的相關(guān)位置參數匯總反饋給工控機再來(lái)控制機械手的運行,這樣可以減小 機械手的震動(dòng)對相機拍攝圖像的影響。
另外,由于使用機械手確定焊點(diǎn)的過(guò)程對操作者要求較高,因此若更換了工 件,焊接點(diǎn)位置參數就需要重新設置,焊縫信息也需要重新錄入,這對于推廣來(lái) 說(shuō)不夠友好,這個(gè)部分還需要進(jìn)一步的考慮合理優(yōu)化。
7.2 后續工作展望
工業(yè)機器人的研究近幾年的發(fā)展迅速,機器視覺(jué)的發(fā)展也是日新月異,在本 文研究工作的基礎上,仍有以下方向值得進(jìn)一步的研究:
工業(yè)機器人的小型化進(jìn)幾年得到了飛速發(fā)展,為了實(shí)現對工件的自動(dòng)焊接, 對工件的提前分類(lèi)就很有必要了,不要指望就使用這一個(gè)機器人就能實(shí)現對多種 尺寸大小、多種形狀的工件實(shí)施焊接動(dòng)作。
機器視覺(jué)的應用多樣化發(fā)展為本項目引入了更多的可能,在后續的工作中, 我們可以考慮將普通的面陣相機更換為 3D 相機,通過(guò) 3D 掃描來(lái)實(shí)現對工件的形 狀做到更精準的把握。
深度學(xué)習的概念如今得到了越來(lái)越廣泛的運用,將深度學(xué)習的概念引入可能 在后續可以是整個(gè)自動(dòng)焊接更智能化,實(shí)現智能學(xué)習,自適應焊接路徑,并實(shí)現 焊接后通過(guò)掃描焊縫表面的形狀實(shí)現自動(dòng)檢測功能,根據焊縫的形狀判斷焊槍的 狀態(tài)等。
致 謝
在攻讀碩士學(xué)位期間,歷時(shí)一年多,從論文的選題到開(kāi)題,到中期報告以及 遇到的問(wèn)題及解決方案等,期間經(jīng)歷了喜悅、痛苦和彷徨,這一路走來(lái)都是在嚴 老師的親切關(guān)懷和悉心指導下堅持下來(lái)的,他對論文的修改多次提出了建設性的 意見(jiàn),他嚴謹的科學(xué)態(tài)度和治學(xué)精神,精益求精的工作作風(fēng),深深的感染和激勵 著(zhù)我,同時(shí)嚴老師還在思想上、生活上給我以指導和無(wú)微不至的關(guān)懷,在此謹向 嚴老師致以誠摯的謝意和崇高的敬意。還有學(xué)院的蘇老師對我論文的修正提出了 很多寶貴建議,以及開(kāi)題和中期報告以及論文給了很多悉心指導的教授專(zhuān)家們, 在此一并致以真誠的感謝崇高的敬意,感恩你們。
另外,我還要感謝參與自動(dòng)焊接引導系統實(shí)現的伙伴們,他們?yōu)榇颂峁┝司?大的幫助和支持,還有實(shí)驗工廠(chǎng)的兄弟單位也在此一并感謝。 最后,再次對關(guān)心、幫助、支持我的老師、同學(xué)、同事、家人表示衷心的感 謝!
參考文獻
[1] 范芳蕾;李亮玉;岳建峰;姜海珍-GMAW 焊熔池圖像處理算法[J].機械科學(xué)與技術(shù), 2008,10(12):34-36
[2] 百度文庫,16Mn 鋼焊接坡口設計與焊縫質(zhì)量控制合集[EB/OL]-https://wenku.baidu,2019 年
[3] 高正祥-基于雙目視覺(jué)的立體曲面焊接機器人測控關(guān)鍵技術(shù)研究[OL]- 2016-04-01
[4] 互聯(lián)網(wǎng)文檔資源,工大宏遠,焊接工藝的發(fā)展歷程[EB/OL],http://blog.sina.com,2019
[5] 王彬-我國焊接自動(dòng)化技術(shù)的現狀與發(fā)展趨勢[J] .焊接技術(shù), 2000,12(10):25-26
[6] 互聯(lián)網(wǎng)文檔資源,中國-工業(yè)機器人[OL] --http://blog.sina.com,2019
[7] 互 聯(lián) 網(wǎng) 文 檔 資 源 , 中 國 - 工 業(yè) 機 器 人 行 業(yè) 的 就 業(yè) 前 景 、 待 遇 怎 么 樣 ? [OL] , http://www.elecfans, 2019
[8] 陳炯。自動(dòng)焊接設備在全位置焊中的應用[J] .電焊機, 2004,07(8):28-30
[9] 百度文庫,自動(dòng)焊接機械手設計[OL] ,http://wenku.baidu.,2019 [10] 百度文庫,機器視覺(jué)[OL] ,http://wenku.baidu.com,2019
[11] 互聯(lián)網(wǎng)文檔資源,機器視覺(jué)原理解析及典型解決方案[OL] ,http://www.elecfans.-2019
[12] 互聯(lián)網(wǎng)文檔資源,焊接技術(shù)及自動(dòng)化專(zhuān)業(yè)開(kāi)課可行性報告[OL] -http://www.elecfans- 2019
[13] 互聯(lián)網(wǎng)文檔資源,全球工業(yè)機器人企業(yè)盤(pán)點(diǎn)-私服與控制[OL] ,,http://www.elecfans- 2019
[14] 互聯(lián)網(wǎng)文檔資源,工控自動(dòng)化技術(shù)文摘,機器視覺(jué)-系統組成[OL],http://www.gkong.com- 2019
[15] 何明玉。《基于機器視覺(jué)的滿(mǎn)箱檢測算法研究及系統開(kāi)發(fā)》。[D].廣州:廣東工業(yè)大 學(xué),2020,40-50
[16] 房樹(shù)娟。《基于光學(xué)特征的數字圖像取證技術(shù)的研究》[D],上海:東華大學(xué), 2016,20-27
[17] 臧祖望。《工業(yè)鏟平表面缺陷檢測研究與開(kāi)發(fā)》[D],北京:北京交通大學(xué), 2012,06-18
[18] 范有情。《激光焊接中視覺(jué)引導的定位方法研究》[D],湖北:湖北工業(yè)大學(xué), 2013-05-01
[19] 百度文庫,工業(yè)鏡頭畸變簡(jiǎn)介[OL]-深圳市視清科技有限公司-http://wenku.baidu.,2019
[20] 百度文庫,鏡頭畸變情況分析儀器改善方法[OL] -http://wenku.baidu.,2019 [21] 搜狗百科,鏡頭畸變[OL]-https://baike.sougou.com,2019
[22] 百度文庫,什么是鏡頭畸變?[OL]-http://wenku.baidu.,2019
[23] 互聯(lián)網(wǎng)文檔資源,盤(pán)點(diǎn)實(shí)用的工業(yè)機器人選型 9 大參數[OL] , http://www.elecfans.2019
[24] 劉利。《基于圖像處理的瓷磚色差在線(xiàn)檢測方法研究》[D],《長(cháng)春理工大學(xué)博士論文》- 2019-03-01
[25] 互聯(lián)網(wǎng)文檔資源,機器人操作說(shuō)明[OL] ,http://wenku.baidu.c-2019 年 8 月 20 日
[26] 盛新慶。計算電磁學(xué)要論[M].北京:科學(xué)出版社,2004 [27] 王秉中。計算電磁學(xué)[M].北京:科學(xué)出版社,2001
[28] 呂英華。計算電磁學(xué)的數值方法[M].北京:清華大學(xué)出版社,2006
[29] 王長(cháng)清。現代計算電磁學(xué)基礎[M].北京:北京大學(xué)出版社,2005
[30] W. C. Gibson. The Method of Moments in Electromagnetics[M]. New York: Chapman and Hall/CRC, 2008
[31] 胡俊。復雜目標矢量電磁散射的高效算法--快速多極子方法及其應用[D].成都:電子科 技大學(xué),2000
[32] H. C. Martin, G. F. Carey. Introduction to Finite Element Analysis: Theory and Application [M]. New York: McGraw Hill, 1973
[33] 金建銘著(zhù),王建國譯。電磁場(chǎng)有限元方法[M].西安:西安電子科技大學(xué)出版社,1998
[34] M. Clerc. Discrete Particle Swarm Optimization: a fuzzy combinatorial box[EB/OL]. http://clere.maurice.free.fr/pso/Fuzzy_Discrere_PSO/Fuzzy_DPSO.htm, July 16, 2010
[35] S. P. Walker, C. Y. Leung. Parallel Computation of Integral Equation Methods for Three-dimensional Transient Wave Propagation[J]. Communications in Numerical Methods in Engineering, 1997, 11(6): 515-524
[36] 肖珍新。一種新型排渣閥調節降溫裝置[P]. 中國,實(shí)用新型專(zhuān)利,ZL201120085830.0, 2012 年 4 月 25 日
[37] X. F. Liu, B. Z. Wang, W. Shao. A Marching-on-in-order Scheme for Exact Attenuation Constant Extraction of Lossy Transmission Lines[C]. China-Japan Joint Microwave Conference Proceedings, Chengdu, 2006, 527-529
[38] 范士海。 PBGA 焊點(diǎn)開(kāi)路失效原因分析及工藝改進(jìn)措施 [J]. 《環(huán)境技術(shù)》 2018 年 02 期 CNKI:SUN:HJJJ.0.2018-02-006,2018
[39] 陳良。 淺談 SEM&EDS 在 PCB 失效分析中的應用 [J]. 《印制電路資訊》2009 年 第 5 期
[40] A. J. Crispin,V. Rankov. Automated inspection of PCB components using a genetic algorithm template-matching approach [J]. The International Journal of Advanced Manufacturing Technology volume 35, pages293–300(2007)
[41] 何麗梅。 SMT 工藝與 PCB 制造 [M].北京:電子工業(yè)出版社,2013
[42] Gil, I., Fernández-García, R. Electromagnetic interference reduction in printed circuit boards by using metamaterials: a conduction and radiation impact analysis [J].Journal of Electromagnetic Waves and Applications, 2014 , Pages 378-388
[43] 周堅。RT 單片機項目教程:C 語(yǔ)言版(第 2 版) [M].北京:北京航空航天大學(xué)出版社,2018.
[44] Hara, Y.,Doi, H.,Karasaki, K. A system for PCB automated inspection using fluorescent light
[44].IEEE Transactions on Pattern Analysis and Machine Intelligence 10(1):69-78
[45] Shahparnia, S.,Ramahi, O.M. Electromagnetic interference (EMI) reduction from printed circuit boards (PCB) using electromagnetic bandgap structures[J]. 2015,Pages 158-160
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)