24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要:為了解決不具有離線(xiàn)編程功能的切割機器人對形狀復雜的工件作業(yè)時(shí), 在線(xiàn)示教和調試的難題, 開(kāi)發(fā)了一套基于VC++與Open Inventor開(kāi)發(fā)環(huán)境的工業(yè)機器人切割仿真系統。該仿真系統采用計算機圖形學(xué)、虛擬現實(shí)、計算機編程等技術(shù)和方法, 建立了六自由度工業(yè)機器人運動(dòng)學(xué)、動(dòng)力學(xué)、軌跡規劃以及管件切割的仿真平臺, 并具有文件管理、參數輸入、結果輸出、圖形顯示等功能。利用KUKA KR16工業(yè)機器人, 以管件切割為對象, 進(jìn)行了機器人切割的算法驗證、三維圖形顯示與動(dòng)畫(huà)仿真。結果表明:該仿真系統能較好地滿(mǎn)足交互性與實(shí)時(shí)性要求, 驗證了切割仿真系統的有效性。
關(guān)鍵詞:切割仿真系統; 工業(yè)機器人; VC++; Open Inventor;
Abstract:In order to solve the problem when off-line programming capability cutting robot working on complex parts don't have the function of on-line programming by demonstration and debugging, we developed a new industrial robot cutting simulation based on the development of VC + + and Open Inventor. This simulation system use the technology and manner of computer graphics, virtual reality, computer programming etc. to build a 6-DOF industrial robot simulation platform, which has the kinematics, dynamics, trajectory planning and cutting pipe function, meanwhile has the function of file management, parameter input, result output, graphic display etc. We used the KUKA KR16 industrial robot to verify the algorithm validation, display the 3-D graphics and simulate animation. The result showed that, the simulation system can satisfy the requirement of interactivity and real-time, and verify the effectiveness of cutting simulation system.
Keyword:cutting simulation system; industrial robot; VC + +; Open Inventor;
切割機器人因具有切割質(zhì)量穩定、改善工人勞動(dòng)條件、提高勞動(dòng)生產(chǎn)率等優(yōu)點(diǎn), 而廣泛應用于在汽車(chē)、工程機械、石油化工等領(lǐng)域。然而, 切割機器人目前的編程方法主要以在線(xiàn)示教編程為主[1], 機器人運動(dòng)路徑上的關(guān)鍵位置點(diǎn)仍必須通過(guò)示教方式獲取, 對于一些復雜形狀的零部件, 眾多的示教點(diǎn)必須花費大量的示教時(shí)間, 不但降低了機器人的使用效率, 也增加了編程人員的勞動(dòng)強度[2]。因此, 利用計算機動(dòng)態(tài)仿真技術(shù)對其進(jìn)行離線(xiàn)示教和仿真, 將是切割機器人應用的一次革命性的改善[3]。
為此, 加拿大Robot Simualtion公司、以色列Tecnomatix公司、美國Deneb Robotics公司以及ABB機器人公司、安川公司、FANUC公司等相繼推出了商用的離線(xiàn)示教編程系統。然而這些商業(yè)化的離線(xiàn)編程系統成本較高, 使用復雜, 且只支持自家品牌的機器人, 兼容性較差[4]。國內學(xué)者也對機器人離線(xiàn)編程系統進(jìn)行了研究。陳庚順等[5]針對6自由度關(guān)節型焊接工業(yè)機器人工作空間任一點(diǎn)的靈活度分析和仿真, 為檢驗機器人的靈活度性能指標是否滿(mǎn)足機器人的設計要求提供了基礎。曲兵兵等[6]研究了利用FANUC機器人的離線(xiàn)編程軟件Roboguide對FANUC弧焊機器人進(jìn)行離線(xiàn)編程的問(wèn)題。然而, 針對切割機器人尤其是KUKA KR16切割機器人的離線(xiàn)編程系統還未見(jiàn)報道。
KUKA KR16是目前國內自動(dòng)生產(chǎn)線(xiàn)中使用較為廣泛的切割機器人。由于KUKA機器人目前采用的是示教再現的編程方法。因此, 在實(shí)際作業(yè)過(guò)程中, 管管相交或連接時(shí), 受到管徑、管厚、相交類(lèi)型等參數影響, 切割線(xiàn)往往是復雜空間曲線(xiàn), 占用機器人示教再現的編程方法難以在生產(chǎn)中完成調試, 因此, 開(kāi)發(fā)切割機器人離線(xiàn)編程系統, 對機器人在切割作業(yè)的應用具有重要的意義。
機器人離線(xiàn)示教編程系統是在計算機上通過(guò)機器人幾何模型與實(shí)際工作環(huán)境的模型, 建立機器人系統運動(dòng)的數字模型, 并對機器人運動(dòng)的空間軌跡點(diǎn)進(jìn)行編輯, 通過(guò)進(jìn)行機器人的運動(dòng)仿真, 對工作過(guò)程中的碰撞和干涉進(jìn)行檢查, 最后對編制的程序進(jìn)行后置[7]。因此, 實(shí)現機器人切割仿真是開(kāi)發(fā)離線(xiàn)示教編程系統的基礎。
本文以KUKA KR16工業(yè)機器人的管件切割為例, 開(kāi)發(fā)了一套基于VC++與Open Inventor的工業(yè)機器人切割軟件, 完成了工業(yè)機器人運動(dòng)學(xué)、動(dòng)力學(xué)及軌跡規劃的分析與仿真, 具有實(shí)現文件管理、參數輸入、結果輸出、圖形顯示等功能, 并實(shí)現了機器人切割管件的三維圖形顯示與動(dòng)畫(huà)仿真。
1、系統的需求分析
作業(yè)條件、運動(dòng)軌跡和作業(yè)順序可以靈活改變是工業(yè)機器人切割加工的主要特征。為了滿(mǎn)足其特征要求, 其仿真系統需求分析, 需從作業(yè)條件、運動(dòng)軌跡和作業(yè)順序入手。因此, 本切割仿真系統的設計, 從幾何建模開(kāi)始實(shí)現切割主、支管正交、斜交, 偏心或不偏心, 不同的坡口, 不同的切割方向, 并滿(mǎn)足火焰切割工藝要求。所開(kāi)發(fā)的軟件具有以下功能:
(1) 可以滿(mǎn)足各種壁厚、直徑的管-管相貫或板-管相貫在正交或斜交、帶坡口或不帶坡口、偏心和不偏心情況下馬鞍形軌跡及管子切割的計算。具有較好的適應性。
(2) 切割仿真系統是基于KUKA工業(yè)機器人開(kāi)發(fā)的管件切割系統, 可同時(shí)向ABB、REIS、FANUC等工業(yè)機器人系統擴展。具有較好的擴展性。
(3) 在輸入已知的管件結構參數、切割工藝參數及工業(yè)機器人參數后, 能很快計算出管件切割后的幾何形狀、坡口面形狀及切割軌跡線(xiàn), 并在圖形顯示區以三維的形式實(shí)時(shí)顯示。具有較好的實(shí)時(shí)性。
(4) 在計算完成后, 能生成控制工業(yè)機器人所需的數據文件。將生成的工業(yè)機器人數據文件送到機器人仿真系統, 就可以進(jìn)行工業(yè)機器人管件切割仿真。具有較好的數據接口, 實(shí)現數據的無(wú)縫連接。
(5) 將生成的機器人數據文件送到機器人控制柜中, 就可以控制工業(yè)機器人進(jìn)行管件切割。具有較好的便捷性。
(6) 能夠計算的管件切割類(lèi)型多, 操作方便, 功能齊全, 能夠滿(mǎn)足用戶(hù)在切割管件方面的工藝、精度要求。
2、仿真系統的設計
2.1、總體設計
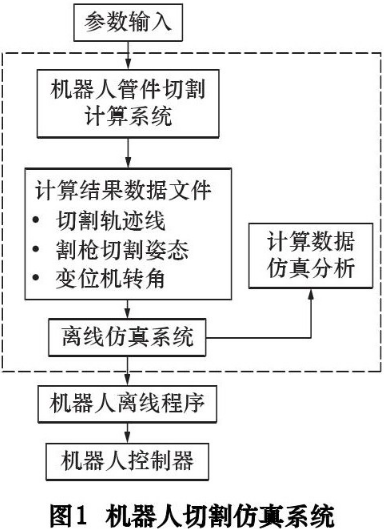
機器人切割仿真系統主要包括機器人管件切割計算系統和機器人離線(xiàn)仿真系統, 如圖1所示。機器人管件切割計算系統主要是根據用戶(hù)的實(shí)際需要, 生成實(shí)現機器人管件切割的控制數據, 包括:切割路徑軌跡點(diǎn)數據、切割姿態(tài)歐拉角以及控制管件旋轉的變位機轉角等。機器人離線(xiàn)仿真系統主要是對機器人管件切割計算軟件系統所生成的數據進(jìn)行仿真模擬, 在離線(xiàn)環(huán)境下檢驗計算結果數據的準確性。最后, 將校核后的數據生成機器人離線(xiàn)程序并輸入機器人控制系統中, 實(shí)現機器人對管件的切割。
2.2、軟件各功能模塊設計
機器人切割計算系統包括四大模塊, 分別是人機交互功能模塊、圖形顯示功能模塊、割槍切割控制數據計算功能模塊以及計算結果后處理功能模塊。軟件系統結構框圖如圖2所示。
2.2.1、人機交互功能模塊
人機交互功能模塊主要是實(shí)現計算數據的輸入與計算結果的顯示。軟件提供友好的人機交互接口, 用戶(hù)根據實(shí)際需求, 在軟件提示下完成相應計算參數的輸入與修改。輸入計算參數主要包括以下3個(gè)部分: (1) 管件結構參數; (2) 切割工藝參數; (3) 機器人工作狀態(tài)參數。
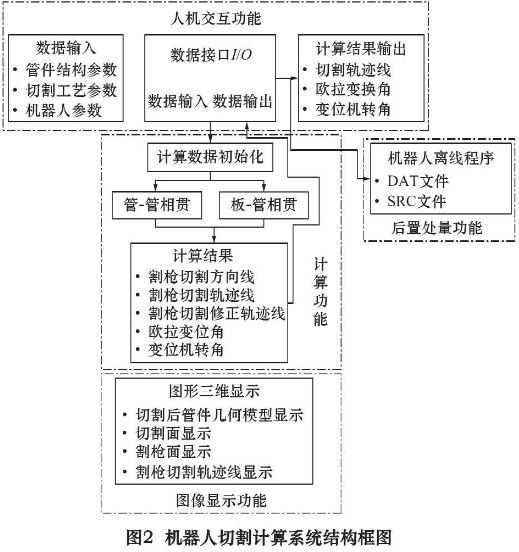
2.2.2、計算模塊
機器人管件切割計算模塊是仿真系統的核心部分。該計算模塊可根據用戶(hù)的輸入參數, 通過(guò)程序計算最終生成控制割槍切割的數據, 包括:割槍切割方向曲線(xiàn)、割槍切割軌跡曲線(xiàn)、割槍切割修正軌跡曲線(xiàn)、割槍切割姿態(tài)及變位機旋轉角度。通過(guò)這些數據可控制機器人實(shí)現管件切割。
2.2.3、圖形顯示功能模塊
圖形顯示功能模塊主要是實(shí)現程序計算結果的圖形顯示。圖形顯示功能模塊根據程序計算結果, 動(dòng)態(tài)地顯示主/支管坡口的馬鞍型曲線(xiàn)、坡口曲面以及割槍切割軌跡線(xiàn)。通過(guò)圖形顯示功能模塊可以直觀(guān)形象地顯示切割坡口以及割槍切割時(shí)的軌跡線(xiàn)。
2.2.4、后處理模塊
機器人管件切割計算系統在計算得到結果數據后, 還可根據機器人類(lèi)型的不同輸出相應的離線(xiàn)程序。該離線(xiàn)程序可直接輸入機器人離線(xiàn)仿真系統對計算結果進(jìn)行檢驗。將該離線(xiàn)程序輸入機器人控制系統中即可控制機器人進(jìn)行管件切割。
3、仿真系統的實(shí)現
3.1、開(kāi)發(fā)環(huán)境的選擇
VC++6.0是Microsoft公司推出的一個(gè)基于Windows系統平臺、可視化的集成開(kāi)發(fā)環(huán)境, 它的程序按C++語(yǔ)言編寫(xiě), 并加入了功能強大的MFC類(lèi)庫。MFC中封裝了大部分Windows API函數和Windows控件, 它包含的功能涉及到整個(gè)Windows操作系統。MFC不僅給用戶(hù)提供了Windows圖形環(huán)境下應用程序的框架, 而且還提供了創(chuàng )建應用程序的組件[8]。因此, 使用VC++提供的高度可視化的開(kāi)發(fā)工具和MFC類(lèi)庫, 可使應用程序開(kāi)發(fā)變得簡(jiǎn)單。
Open Inventor是在SGI公司的Open GL基礎上建立的支持不同硬件平臺的三維圖形開(kāi)發(fā)庫。它具有一個(gè)相對獨立的三維顯示窗口, 能方便地實(shí)現簡(jiǎn)單的縮放、旋轉、平移等操作, 并為用戶(hù)提供了一個(gè)統一的操作和支持多種三維圖形格式。另外, 它還專(zhuān)門(mén)為VC++6.0提供了API接口, 便于程序員快速、簡(jiǎn)潔地開(kāi)發(fā)各種類(lèi)型的交互式三維圖形程序[9-10]。用戶(hù)可以根據此優(yōu)點(diǎn), 建立良好穩定的機器人仿真系統。
3.2、切割過(guò)程仿真的實(shí)現
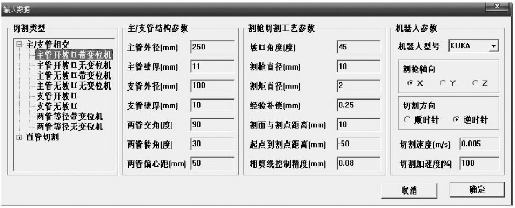
3.2.1、切割系統參數的設定
切割系統參數的輸入界面如圖3所示。點(diǎn)擊確定輸入該參數, 程序會(huì )隨之計算出相貫線(xiàn)軌跡[6]。根據相貫線(xiàn)軌跡, 得到機器人末端運動(dòng)軌跡, 然后根據該軌跡進(jìn)行機器人運動(dòng)學(xué)反解, 得到各個(gè)關(guān)節隨時(shí)間而改變的轉角, 將轉角值實(shí)時(shí)輸入到每個(gè)運動(dòng)關(guān)節中, 仿真即可實(shí)現。軌跡規劃是根據作業(yè)任務(wù)要求, 計算出預期的運動(dòng)軌跡。首先對機器人的任務(wù), 運動(dòng)路徑和軌跡進(jìn)行描述。用戶(hù)只需設定手部的目標位姿, 然后確定到達該目標的路徑點(diǎn)、持續時(shí)間、運動(dòng)速度等參數軌跡。并且在計算機內部描述所要求的軌跡, 即選擇習慣規定及合理的軟件數據結構。

3.2.2、動(dòng)態(tài)仿真過(guò)程的實(shí)現
動(dòng)態(tài)仿真過(guò)程主要是利用傳感器和旋轉變化來(lái)實(shí)現的[11]。利用定時(shí)器傳感器, 以一定的時(shí)間間隔, 回調一個(gè)旋轉節點(diǎn), 該旋轉的角度由機器人運動(dòng)學(xué)的反解確定。根據Open Inventor中旋轉變換獨特的幾何積聚效應, 在較小的時(shí)間間隔下, 將產(chǎn)生連續運動(dòng)的視覺(jué)效果。

以上程序是機器人中一個(gè)關(guān)節的動(dòng)態(tài)角度控制部分。
在主函數中, 定義一個(gè)定時(shí)器傳感器rotating Sensor1。同時(shí)也指定了該定時(shí)器傳感器的回調函數rotating Sensor Callback1以及用戶(hù)自定義的數據即旋轉節點(diǎn)Rot1。使用set Interval設置調度間隔為每秒調度10次, 通過(guò)“rotating Sensor1->schedule () 控制調度開(kāi)始。在回調函數中, 將Joint Theta1[][]中所包含的旋轉角度值一次賦給旋轉節點(diǎn)。這樣可分別設定6個(gè)關(guān)節的轉動(dòng)角度, 形成動(dòng)態(tài)仿真效果。
3.2.3、仿真系統的實(shí)現
系統在經(jīng)過(guò)編譯、重建, 運行后, 會(huì )彈出一個(gè)窗口, 如圖4所示。
點(diǎn)擊“打開(kāi)”, 可選擇打開(kāi)“主管”, 如圖5所示, 進(jìn)入輸入參數的界面, 如圖6所示。也可以直接通過(guò)“數據”, 將新的數據參數進(jìn)行輸入。
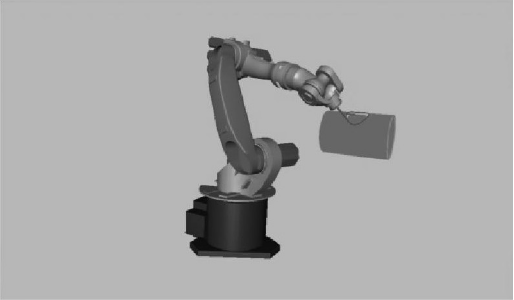
依次點(diǎn)擊“計算仿真”的計算、仿真, 彈出動(dòng)態(tài)仿真窗口, 如圖7所示。

4、結語(yǔ)
開(kāi)發(fā)了一套基于VC++與Open Inventor的6R工業(yè)機器人切割仿真系統, 完成了工業(yè)機器人運動(dòng)學(xué)、動(dòng)力學(xué)及軌跡規劃的分析與仿真, 并實(shí)現了工業(yè)機器人及切割管件的三維圖形顯示與動(dòng)畫(huà)仿真。經(jīng)過(guò)測試, 該仿真系統達到了設計的要求, 為KUKA KR16切割機器人離線(xiàn)示教編程系統開(kāi)發(fā)提供了依據。也為其它焊接機器人離線(xiàn)示教編程系統開(kāi)發(fā)提供了一種方法參考。
參考文獻
[1]張軻, 謝妤, 朱曉鵬.工業(yè)機器人編程技術(shù)及發(fā)展趨勢[J].金屬加工:熱加工, 2015 (12) :16-19.
[2]張強.基于型鋼切割的機器人離線(xiàn)編程關(guān)鍵技術(shù)研究[D].天津:天津大學(xué), 2013.
[3]許燕玲林濤陳善本.焊接機器人應用現狀與研究發(fā)展趨勢[J].金屬加工:熱加工, 2010 (8) :32-36.
[4]魏志麗等.工業(yè)機器人離線(xiàn)編程商業(yè)軟件系統綜述[J].機械制造與自動(dòng)化, 2016, 45 (6) :180-183.
[5]陳庚順, 陳丹陽(yáng), 強寶剛.焊接工業(yè)機器人靈活性分析及仿真研究[J].遼東學(xué)院學(xué)報:自然科學(xué)版, 2011, 18 (3) :203-214.
[6]曲兵兵, 房術(shù)榮, 張偉強, 等.基于Roboguide的弧焊機器人離線(xiàn)編程研究[J].煤礦機械, 2016, 36 (4) , 50-52.
[7]王洪雨.基于Solid Works的工業(yè)機器人離線(xiàn)仿真系統分析[J].企業(yè)導報, 2016 (13) :190.
[8]鄭阿奇, 丁有和.Visual C++教程[M].北京:清華大學(xué)出版社, 2016.
[9]閻鋒欣.Open Inventor程序設計從入門(mén)到精通[M].北京:清華大學(xué)出版社, 2007.
[10]王偉東, 錢(qián)東海.基于Open Inventor的機器人運動(dòng)學(xué)仿真和軌跡規劃研究[J].機械與電子, 2010 (5) :59-63.
[11]王海鵬, 陳和平, 朱英韜, 等.工業(yè)機器人在板材切割生產(chǎn)線(xiàn)的應用[J].組合機床與自動(dòng)化加工技術(shù), 2015 (5) :141-144.