24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要:根據數控機加工自動(dòng)化生產(chǎn)線(xiàn)的控制要求, 以PLC為控制核心, 構建ABB工業(yè)機器人、數控車(chē)床、變頻器、傳感器等與運動(dòng)部件之間協(xié)同作業(yè)的系統, 并通過(guò)RS485與Device Net總線(xiàn)通信協(xié)議, 實(shí)現各種數據交換, 達到各設備的運轉控制要求。經(jīng)調試運行, 機加工自動(dòng)化生產(chǎn)線(xiàn)系統運轉正常, 能起到提高生產(chǎn)效率、降低生產(chǎn)成本的效果。
關(guān)鍵詞:工業(yè)機器人; 機加工生產(chǎn)線(xiàn); PLC控制;
Abstract:According to the control requirements of CNC machine automation production line, PLC is used as the control core to construct the system of ABB industrial robots, CNC lathes, frequency converters, sensors and other moving parts, and through RS485 and Device Net bus communication protocol, to achieve a variety of data exchange, to achieve the operation of the equipment control requirements. The commissioning operation, machining automated production line system is running normally, can improve the production efficiency and reduce the cost.
Keyword:industrial robots; machining production line; PLC control;
為了提高生產(chǎn)效率, 減輕人員勞動(dòng)強度, 降低機加工生產(chǎn)過(guò)程中的勞動(dòng)力成本, 需對原有的數控機加工設備基礎上進(jìn)行升級改造, 以達到生產(chǎn)線(xiàn)一天24小時(shí)連續加工生產(chǎn)要求。為此, 將原人工數控機加工生產(chǎn)線(xiàn)設計成以工業(yè)機器人協(xié)同合作的機加工生產(chǎn)線(xiàn)控制系統。該系統采用PLC為控制核心, 構建2臺工業(yè)機器人與原生產(chǎn)線(xiàn)設備協(xié)同合作, 實(shí)現從原料毛坯棒料、數控機加工、零件傳送、堆放碼垛無(wú)人控制, 從而實(shí)現整個(gè)生產(chǎn)過(guò)程的自動(dòng)化[1-7]。
1、工業(yè)機器人控制的自動(dòng)化生產(chǎn)線(xiàn)系統組成及工藝流程
本文研究的工業(yè)機器人控制的自動(dòng)化生產(chǎn)線(xiàn)系統組成如圖1所示。系統由原材料堆放與物料翻轉、數控車(chē)床自動(dòng)上下料、皮帶運輸、智能分揀碼垛入庫、控制器與氣源供應5個(gè)單元。各單元實(shí)現的功能如下。
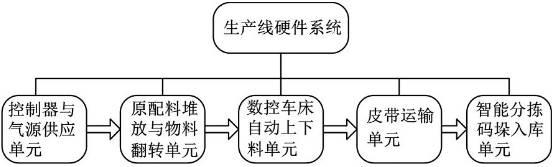
圖1 工業(yè)機器人控制的自動(dòng)化生產(chǎn)線(xiàn)系統組成及工藝流程
(1) 物料翻轉單元:由工位帶檢測原料平面倉、物料翻轉氣爪、系統按鈕控制盒及過(guò)濾減壓閥等組成, 主要實(shí)現功能是系統啟動(dòng)、停止、復位和急停的操作;存放待加工的毛坯棒料;棒料經(jīng)車(chē)床加工一頭后由機器人搬運至翻轉氣爪上實(shí)現棒料的翻轉, 從而在車(chē)床里實(shí)現棒料另一頭的加工;系統氣源的進(jìn)口, 對氣體進(jìn)行過(guò)濾減壓。
(2) 數控車(chē)床自動(dòng)上下料單元:主要由數控車(chē)床和工業(yè)機器人組成, 由工業(yè)機器人將需加工的工件放至車(chē)床加工工位, 車(chē)床實(shí)現自動(dòng)加工, 加工完成后再由機器人把工件取出放至相關(guān)地方。
(3) 皮帶運輸單元:由皮帶傳輸機構組成, 由三相異步電動(dòng)機作為動(dòng)力, 當機器人將物件放至傳送帶上時(shí), 傳送帶接到啟動(dòng)信號運行, 當尾部的電感傳感器檢測到物件到達時(shí), 傳送帶即停止運行, 等待機器人來(lái)抓取。
(4) 智能分揀碼垛入庫單元:由ABB1410工業(yè)機器人和3×3碼垛立體倉庫組成。實(shí)現功能當傳送帶尾端檢測到工件到達時(shí), 機器人啟動(dòng)去抓取工件, 之后機器人會(huì )根據倉庫各庫位工件的有無(wú)按順序入庫。
(5) 控制器與氣供單元:由三菱PLC、變頻器、開(kāi)關(guān)電源、斷路器、接線(xiàn)端子排、空氣壓縮機組成, 是電氣元部件的匯集, 提供電源和氣源。
2、自動(dòng)化生產(chǎn)線(xiàn)的硬件設計
工業(yè)機器人控制的自動(dòng)化生產(chǎn)工藝流程由三菱PLC作為控制中心負責, 通過(guò)主從站通訊交互信號形式, 完成信號轉換、工業(yè)機器人、數控車(chē)床和運輸皮帶等設備的動(dòng)作全過(guò)程協(xié)調控制。整個(gè)工業(yè)機器人控制的自動(dòng)化生產(chǎn)線(xiàn)工藝流程如圖2所示, 主要包括:PLC控制器、機器人、數控車(chē)床、變頻器、觸摸屏、光電傳感器及限位開(kāi)關(guān)、空氣壓縮機與管系等。
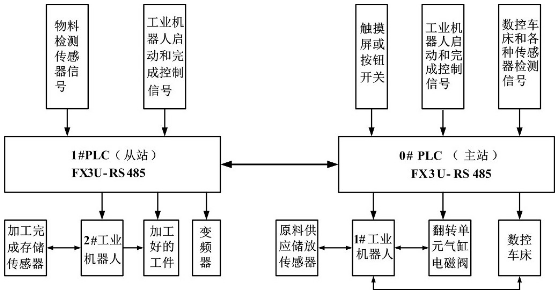
圖2 自動(dòng)化生產(chǎn)線(xiàn)工藝流程
2.1、設備的選型
利用ABB IRB 1410工業(yè)機器人、華中HNC-180xp/T3數控系統、三菱FX3U系列PLC、RS485通信模塊、三菱FR-D720s變頻器、光電傳感器及限位開(kāi)關(guān)、供氣系統等設備或部件組成機加工的自動(dòng)化生產(chǎn)線(xiàn)閉環(huán)控制系統, 通過(guò)工業(yè)機器人的靈活抓取, 數控車(chē)床的加工, 實(shí)現物料和零件的移位和轉移。
2.2、自動(dòng)化生產(chǎn)線(xiàn)PLC的I/O確定
整個(gè)系統需要確定的PLC端口有2個(gè), 主要是主站0#PLC與從站1#PLC。現以1#PLC為例說(shuō)明。
輸入端口:X11 (傳送帶物料放檢測) ;X12 (傳送帶物料拿檢測) ;X13 (機器人抓件完成 (OUT2) ) ;X14 (機器人放件完成 (OUT3) ) 。
輸出端口:Y0 (變頻器正轉) ;Y1 (變頻器反轉) ;Y2 (電機抱閘) ;Y3 (機器人抓件 (IN1) ) ;Y4 (機器人放件 (IN2) ) ;Y5 (機器人Start at Main (IN3) ) ;Y06 (機器人Stop (IN4) ) ;Y7 (機器人Motors On (IN5) ) ;Y10 (機器人Motors Off (IN6) ) 。
除了以上需確定的PLC端口外, 還需確定PLC通訊信號、機器人信號、車(chē)床信號等, 在此不再重述。
2.3、PLC與工業(yè)機器人控制柜通訊模塊接線(xiàn)圖
生產(chǎn)線(xiàn)的電氣接線(xiàn)圖主要有主站0#PLC與從站1#PLC、數控車(chē)床、工業(yè)機器人控制柜4大部件的安裝與接線(xiàn)。其中PLC、車(chē)床應用得比較多, 不再敘述。而工業(yè)機器人的接線(xiàn)相對比較少, 特別是控制柜的DSQC652通訊模塊與PLC的接線(xiàn), 具體如圖3所示。
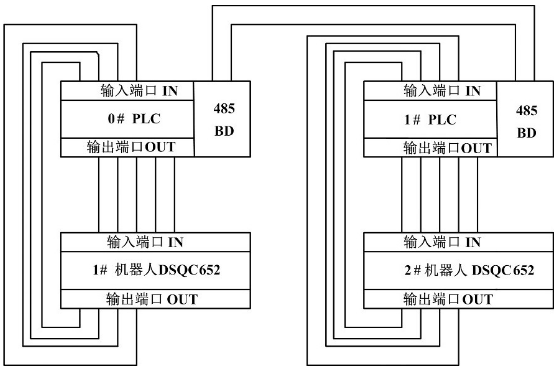
圖3 PLC與工業(yè)機器人控制柜通訊模塊DSQC652通訊模塊的接線(xiàn)圖
3、自動(dòng)化生產(chǎn)線(xiàn)的軟件編程控制設計
整個(gè)生產(chǎn)線(xiàn)控制流程如圖4所示。從流程中可看出, PLC是整個(gè)系統的核心, 它控制著(zhù)系統的正常運行, 并針對具體的情況進(jìn)行指令發(fā)布, 工業(yè)機器人、數控車(chē)床和電氣設備根據設定的相關(guān)信息的輸入輸出指令, 分別由PLC、工業(yè)機器人和數控車(chē)床三部分的程序調動(dòng)對應的設備執行動(dòng)作。
3.1、PLC控制設計
本自動(dòng)化生產(chǎn)線(xiàn)控制系統是由2臺三菱PLC組成, 通過(guò)RS485通訊模塊構成N:N網(wǎng)絡(luò )通信, 以達到動(dòng)作的協(xié)調和信號的傳遞。控制流程如圖5所示。編寫(xiě)程序控制時(shí)設0#PLC為主站, 1#PLC為從站, 從站個(gè)數為1個(gè), 通信的軟元件點(diǎn)數的刷新模式為1, 重試次數設定3次, 通信超時(shí)設置50 ms。設置超時(shí)與二臺PLC的安裝距離有關(guān), 距離越長(cháng), 設置時(shí)間越長(cháng)。
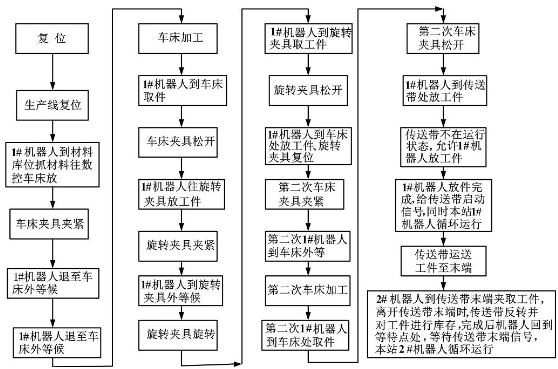
圖4 自動(dòng)化生產(chǎn)線(xiàn)控制主流程圖

圖5 PLC控制流程圖
3.2、工業(yè)機器人控制設計
工業(yè)機器人由于具有執行機構運動(dòng)的控制機能, 所以可做點(diǎn)位和連續軌跡。其中點(diǎn)位只控制執行機構由一點(diǎn)到另一點(diǎn)的準確定位, 適用于機床上下料、一般搬運和裝卸等作業(yè)。因此, 自動(dòng)生產(chǎn)線(xiàn)機加工的原料到機床、機床到翻轉臺、機床到傳送帶、傳送帶到零件倉儲的作業(yè)都由工業(yè)機器人完成。現以1#工業(yè)機器人控制智能分揀碼垛入庫單元說(shuō)明其編程思路, 如圖6所示。
3.3、數控車(chē)床機加工控制設計
當數控車(chē)床準備好以后, 向機器人發(fā)送信號, 機器人接收信號動(dòng)作將原材料送至車(chē)床夾盤(pán)夾緊后, 機械臂退出并關(guān)上數控門(mén)后, 由數控門(mén)限位開(kāi)關(guān)發(fā)出數控加工指令。機加工的自動(dòng)加工過(guò)程, 依不同加工材料、元件、精度而有所不同, 所走的軌跡是不同的, 它由數控具體的編程決定, 但流程是一樣的, 如圖7所示。

圖6 1#機工業(yè)機器人控制智能分揀碼垛入庫流程圖

圖7 數控機加工流程圖
4、結束語(yǔ)
機加工自動(dòng)控制系統經(jīng)過(guò)實(shí)際調試和使用, 滿(mǎn)足了現場(chǎng)生產(chǎn)所需, 控制過(guò)程邏輯準確, 材料零件傳送到位, 抓取精度高, 各個(gè)動(dòng)作和執行機構達到設計要求, 并可以連續不間斷地運行24小時(shí), 降低了工人勞動(dòng)強度, 提高了生產(chǎn)效率, 具有一定經(jīng)濟和推廣價(jià)值。
參考文獻
[1]王鴻博, 李建東.基于工業(yè)機器人的分揀生產(chǎn)線(xiàn)群控通信系統設計[J].制造技術(shù)與機床, 2016 (03) :93-97.
[2]蘇淵博, 李霞等.基于PLC控制的機器人自動(dòng)化生產(chǎn)線(xiàn)設計[J].智能機器人, 2016 (11) :65-68.
[3]李太勝.基于PLC控制的工業(yè)機器人系統的研究與實(shí)現[J].中國高新技術(shù)企業(yè), 2014 (15) :26-27.
[4]劉謙波.基于PLC的工業(yè)機器人藥瓶分揀系統的實(shí)現[J].機電工程技術(shù), 2014 (08) :29-31.
[5]施文龍, 閔華松.工業(yè)機器人運動(dòng)控制系統的設計與實(shí)現[J].自動(dòng)化與儀表, 2015 (05) :37-41.
[6]李煜卉, 彭勇剛.工業(yè)機器人通用圖形化編程軟件的研究[J].機電工程, 2016 (4) :502-506.
[7]曹智.工業(yè)機器人在沖壓自動(dòng)化生產(chǎn)線(xiàn)的應用研究[J].高新技術(shù), 2017 (02) :9-10.