24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
隨著(zhù)城市化的發(fā)展,機動(dòng)車(chē)數量得到了快速的增長(cháng),使得城市道路交通日趨擁擠,而擁堵現象主要發(fā)生在道路交叉口。因此,單交叉口的交通信號管理對道路交通的有效運行有著(zhù)舉足輕重的作用。論文結合實(shí)際的道路交通狀況,將基于機器視覺(jué)的交通參數采集技術(shù)和模糊神經(jīng)網(wǎng)絡(luò )控制算法應用于交通管理系統中,形成的智能交通信息系統可以根據實(shí)時(shí)的路口交通流信息對各個(gè)方向的交通信號燈進(jìn)行智能化的管理,引導車(chē)輛有效通行。
論文首先對智能交通信息系統進(jìn)行需求分析,根據實(shí)際的功能需求進(jìn)行系統整體方案設計,對系統中的關(guān)鍵技術(shù)進(jìn)行介紹,重點(diǎn)對智能交通信息系統中的交通參數采集技術(shù)和模糊祌經(jīng)網(wǎng)絡(luò )算法進(jìn)行研宄。為了獲取道路口交通參數信息,將采用OpenCV機器視覺(jué)技術(shù)對路口車(chē)輛排隊長(cháng)度,車(chē)流量及車(chē)速三個(gè)交通參數進(jìn)行檢測。?車(chē)輛排隊長(cháng)度檢測主要-足對車(chē)道圖像進(jìn)行車(chē)輛運動(dòng)檢測和存在檢測確定車(chē)輛隊列隊尾位置,將車(chē)道停車(chē)線(xiàn)作為車(chē)輛排隊隊首位置,然后采用攝像機標定技術(shù)實(shí)現縱向像素距離到實(shí)際三維空間的轉換。車(chē)流量及車(chē)速檢測是通過(guò)在圖像中的停車(chē)線(xiàn)和人行橫道之間設置虛擬線(xiàn)圈,虛擬線(xiàn)圈內運用高斯混合模型建立背景,背景差分法對運動(dòng)車(chē)輛進(jìn)行檢測,最終根據虛擬線(xiàn)圈內的狀態(tài)來(lái)獲得車(chē)流量信息以及對車(chē)輛速度進(jìn)行檢測。在獲取準確的交通參數采集的基礎上,將模糊控制算法應用于道路交叉口交通信號控制系統中。通過(guò)研宄分析發(fā)現算法主觀(guān)性較強,因此將在模糊控制系統基礎上融入具有自學(xué)習功能的神經(jīng)網(wǎng)絡(luò )算法,形成以模糊神經(jīng)網(wǎng)絡(luò )為核心的智能交通信息系統。將采集到的交通參數作為模糊神經(jīng)網(wǎng)絡(luò )算法的輸入參數,根據實(shí)際采集到的樣本數據進(jìn)行訓練自動(dòng)生成控制規則,由輸入的交通參數進(jìn)行模糊推理獲得待通行相位的交通控制策略。為了驗證算法的有效性,在不同交通流狀況下對定時(shí)控制、模糊控制及模糊神經(jīng)網(wǎng)絡(luò )三種控制方法進(jìn)行性能仿真,以車(chē)輛平均延誤作為技術(shù)指標。通過(guò)方案設計和算法研宄,最后完成系統的硬件平臺搭建及軟件設計。課題選用嵌入式工控機作為系統的主控制器,通過(guò)路口網(wǎng)絡(luò )攝像頭采集路口視頻流,然后進(jìn)行處理獲取待通行相位的三個(gè)交通參數,應用模糊祌經(jīng)網(wǎng)絡(luò )算法對交通參數進(jìn)行處理,得到待通行相位的綠燈時(shí)長(cháng);通過(guò)LoRa無(wú)線(xiàn)通信模塊將包含通行相位和綠燈時(shí)長(cháng)的控制策略幀數據傳遞給交通燈控制模塊;ARM處理器對傳遞的幀數據進(jìn)行解析,最終實(shí)現對交通燈模塊的亮滅以及配時(shí)的管理。
論文研宄的智能交通信息系統從機器視覺(jué)的多交通參數檢測、交通信號燈控制策略、交通燈模塊配時(shí)校驗等方面進(jìn)行功能測試,測試結果和實(shí)驗數據表明,系統能夠實(shí)現對單交叉路口的交通信號燈進(jìn)行智能管理,對交通路口的信號配時(shí)進(jìn)行了優(yōu)化,達到了預期的研宄目標。
關(guān)鍵詞:單交叉路口;智能交通;機器視覺(jué);模糊神經(jīng)網(wǎng)絡(luò );LoRa;ARM;
abstract
With the development of urbanization, the number of motor vehicles has been growing rapidly, which makes the urban road traffic increasingly crowded, and the congestion mainly occurs at the road intersection. Therefore, the traffic signal management of single intersection plays an important role in the effective operation of road traffic. Combining with the actual road traffic situation, the paper applies the traffic parameter acquisition technology based on machine vision and the fuzzy neural network control algorithm to the traffic management system. The formed intelligent traffic information system can intelligently manage the traffic lights in all directions according to the real-time intersection traffic flow information, and guide the vehicles to pass effectively.
Firstly, the paper analyzes the demand of its, designs the overall scheme of the system according to the actual functional demand, introduces the key technologies in the system, and focuses on the research of the traffic parameter acquisition technology and fuzzy computer network algorithm in its. In order to obtain the information of traffic parameters, opencv machine vision technology will be used to detect the three traffic parameters of vehicle queue length, traffic flow and vehicle speed.? Vehicle queue length detection mainly includes vehicle motion detection and presence detection on lane image to determine the end position of vehicle queue, taking Lane parking line as the first position of vehicle queue, and then using camera calibration technology to realize the conversion from the longitudinal pixel distance to the actual three-dimensional space. Vehicle flow and speed detection is to set up a virtual coil between the stop line and the crosswalk in the image. In the virtual coil, the Gaussian mixture model is used to establish the background, and the background difference method is used to detect the moving vehicle. Finally, the traffic flow information and vehicle speed are obtained according to the status in the virtual coil. On the basis of acquiring accurate traffic parameters, the fuzzy control algorithm is applied to the traffic signal control system of Road intersection. Through the research and analysis, it is found that the algorithm has strong subjectivity. Therefore, the neural network algorithm with self-learning function will be integrated into the fuzzy control system to form the intelligent transportation information system with the fuzzy neural network as the core. Taking the collected traffic parameters as the input parameters of the fuzzy neural network algorithm, the control rules are automatically generated by training according to the actual collected sample data, and the traffic control strategy of the phase to be passed is obtained by fuzzy reasoning of the input traffic parameters. In order to verify the effectiveness of the algorithm, three control methods, timing control, fuzzy control and fuzzy neural network, are simulated under different traffic flow conditions, and the average vehicle delay is taken as the technical index. Through the scheme design and algorithm research, the hardware platform and software design of the system are finally completed. In this project, the embedded industrial computer is selected as the main controller of the system. The video stream of the intersection is collected by the intersection network camera, and then the three traffic parameters of the phase to be passed are processed to obtain the green light duration of the phase to be passed by the fuzzy computer network algorithm. The control strategy of the phase to be passed and the green light duration will be included by the Lora wireless communication module The short frame data is transmitted to the traffic light control module; the arm processor analyzes the transmitted frame data, and finally realizes the on / off and timing management of the traffic light module.
The intelligent traffic information system studied in this paper is tested from the aspects of multi traffic parameters detection, traffic light control strategy, traffic light module timing verification of machine vision. The test results and experimental data show that the system can realize the intelligent management of traffic lights at single intersection, optimize the signal timing of traffic intersection, and achieve the expected research Target.
Keywords: single intersection; intelligent transportation; machine vision; fuzzy neural network; Lora; arm;
目錄
1緒論
1.1課題研究背景及意義
社會(huì )經(jīng)濟與城市化的發(fā)展,人們出行方式的改變,使得道路車(chē)輛得到飛速增長(cháng),而隨之帶來(lái)的交通問(wèn)題也日趨增多。現有的道路交通管理系統已經(jīng)無(wú)法適應如今的交通壓力,交通堵塞、交通事故、環(huán)境污染和能源浪費等問(wèn)題不僅影響了國家的發(fā)展和社會(huì )的進(jìn)步,同時(shí)給我們的日常出行帶來(lái)很多不便".日本東京由于道路交通問(wèn)題帶來(lái)的經(jīng)濟損失達到了十萬(wàn)億日元年以上:歐洲各國同樣遭受到的損失超過(guò)6000億歐元/年:道路交通問(wèn)題給美國帶:來(lái)各方面損失超過(guò)410億美元/年:而我國,由于交通問(wèn)題所帶來(lái)的經(jīng)濟損失大約為2000億人民幣/年問(wèn)。如此巨大的經(jīng)濟損失迫使世界各國采取-些措施,例如拓寬路面、增加多條道路,建設多條地鐵、對車(chē)輛進(jìn)行限號通行等措施米解決交通擁堵問(wèn)題。這些措施的實(shí)行對交通問(wèn)題起到了一定的改善作用,但面對現有資源的局限性,不能無(wú)休止的采用這種方式,無(wú)法從根本上解決問(wèn)題。因此,國內外學(xué)者開(kāi)始尋求更加高效、更加科學(xué)的交通管理方式來(lái)解決交通問(wèn)題,通過(guò)對路口交通信號燈配時(shí)進(jìn)行優(yōu)化,充分利用綠燈通行時(shí)長(cháng),提高道路交通通行能力。
智能交通系統是在現有的道路設施基礎上將數據采集與傳輸技術(shù)。信息處理技術(shù)和智能控制算法等技術(shù)有效的相互結合,發(fā)揮各自的工作性能,很好的應用于道路交通管理系統中,對路口車(chē)輛通行進(jìn)行有效的管理。智能交通系統可以使整個(gè)道路交通管理實(shí)現信息化、系統化和智能化,促進(jìn)整個(gè)交通控制系統更加高效的疏導各個(gè)方向車(chē)流,協(xié)調道路車(chē)輛有效通行,提高整個(gè)城市道路的通行能力叫。因此,研究和使用高效的智能交通系統對于城市道路交通健康運行具有重要意義。是未米交通發(fā)展的前沿研究方向。單交叉路口的通行能力直接關(guān)乎到整個(gè)城市道路交通管理的有效性,是城市干線(xiàn)及區域化交通管理高效運行的關(guān)鍵,交通$故以及車(chē)輛堵寡現象多發(fā)生于此。因此,研究城市道路交通管現系統,首先對單交叉路口的交通信號控制系統進(jìn)行研究。
現如今的單交叉口交通信號控制系統多采用定時(shí)控制方式根據路口歷史通行數據人為地設定固定的信號周期。面對道路交叉口實(shí)時(shí)多變的車(chē)流量,這種交通控制方式顯然無(wú)法根據實(shí)時(shí)的交通流信息合理分配通行時(shí)長(cháng),這將直接造成時(shí)間的浪費。將智能交通信息系統應用于單交叉路口,可以根據實(shí)時(shí)交通路況信息,智能化的調整交通信號周期。給通行相位分配合理的綠燈通行時(shí)長(cháng),從而引導路口各個(gè)方向車(chē)輛有效通行。提高路口通行能力防止交通擁堵、減少尾氣排放以及能源消耗。因此,研究高效的單交叉路口交通信號控制系統對于提高城市道路交通健康運行具有重要的實(shí)際意義。
本課題所研究的智能交通信息系統正是通過(guò)機器視覺(jué)技術(shù)來(lái)實(shí)時(shí)獲取交叉口交通流信息,運用模糊神經(jīng)網(wǎng)絡(luò )控制算法對路口交通燈進(jìn)行智能調控,實(shí)現道路車(chē)輛有效通行、提高路口通行能力,緩解城市交通擁堵4.智能交通控制無(wú)論從規模化難易程度還是改善城市交通方面都具有可行性和一-定的優(yōu)勢,因此具有良好的發(fā)展前景。課題的研究與具體的實(shí)施具有一定的理論意義,對于構建智慧城市具有良好的實(shí)用價(jià)值。
1.2國內外研究現狀
交通信號控制系統的研究可以追溯到19世紀,作為城市道路交通有效通行的紐帶。
- -直是因內外學(xué)者研究的重點(diǎn)。平面單交叉口是城市交通流的交匯點(diǎn),車(chē)輛擁堵情況經(jīng)常發(fā)生在這里,因此交叉口的通行能力對于解決城市交通問(wèn)題有著(zhù)至關(guān)重要的作用的。近年來(lái),通過(guò)國內外學(xué)者不懈的努力。電子技術(shù)、信息處理技術(shù)以及交通控制算法的不斷發(fā)展和完善,涌現出很多高效、科學(xué)的交通信號控制方法,促進(jìn)城市道路交通智能控制系統不斷發(fā)展。這些交通信號控制系統設計的目的是為了綴解路口車(chē)輛擁堵問(wèn)題,針對路口信號燈的配時(shí)方案進(jìn)行優(yōu)化,確保在有效的時(shí)間內通過(guò)最大車(chē)流量,提高綠燈時(shí)長(cháng)的利用率。
SCOOTS系統是英國研制的一種交通控制系統,其主要通過(guò)對多個(gè)參數進(jìn)行優(yōu)化,達到自適應調節能力,在1975年由英國的交通與道路研究所研制成功,并取得了良好的測試效果問(wèn)。SCooTs系統的優(yōu)勢主要體現在實(shí)用性強、具有較好的穩定性。系統通過(guò)路口布置的傳感器對車(chē)流量進(jìn)行檢測,對采集到的車(chē)流量數據進(jìn)行分析,再通過(guò)相關(guān)模型對路口各個(gè)方向信號燈進(jìn)行配時(shí),從而達到對信號控制方案進(jìn)行優(yōu)化的效果。系統不會(huì )因為個(gè)別車(chē)輛檢測傳:感器反饋的錯誤信息而執行不合理的配時(shí)方案,系統具有自動(dòng)識別和排除錯誤信息的能力。SCooTs 系統經(jīng)過(guò)幾十年的發(fā)展,通過(guò)不斷的優(yōu)化改進(jìn),在全世界多個(gè)國家得到運用與推廣。
TRANSYT系統則屬于靜態(tài)的道路交通管理系統。通過(guò)建立系統模型、運用交通控制優(yōu)化算法對一天中不同時(shí)間段采取不同的交通控制策略。從而對道路通行車(chē)輛進(jìn)行有效的控制".這種交通控制系統是由英國的交通與道路研究所研制成功,系統通過(guò)對道路上來(lái)往車(chē)流量進(jìn)行分析、整合,采用數學(xué)函數對車(chē)流量信總進(jìn)行建模,由理論知識與傳統交通控制策略相結合,建立多交通控制方案,在-天中的不同時(shí)間段選取最合理的控制方案,彌補了交通信號周期固定的缺點(diǎn)。TRANSYT系統以其技術(shù)成熟。實(shí)用性強等優(yōu)點(diǎn)在全世界的多個(gè)城市得到運用。
SCATS系統是悉尼研發(fā)的自適應交通控制系統,其采用分層式三級協(xié)調控制系統,即控制中心、子區域控制中心和交叉路口控制器。系統屬于動(dòng)態(tài)的道路交通管理系統,通過(guò)安裝在路口路停車(chē)線(xiàn)處的車(chē)輛傳感器來(lái)實(shí)時(shí)獲取交叉口的車(chē)流量信息。然后由通信網(wǎng)絡(luò )將數據傳輸到子區域控制中心圖。子區控制中心對各個(gè)路口的數據進(jìn)行整理、匯總然后傳給控制中心:控制中心作為中央控制中心,通過(guò)管理計算機對接收到的數據進(jìn)行存儲、動(dòng)態(tài)分析、制定各個(gè)路口交通控制策略,保證所有交叉口可以健康、穩定的工作問(wèn)。系統通過(guò)運用網(wǎng)絡(luò )通訊技術(shù),計算機技術(shù)等高科技手段對道路交通進(jìn)行管理,體現了未來(lái)的智能交通控制系統的發(fā)展趨勢。
我國對交通信號控制系統的研究與實(shí)施-直不夠成熟,直到20世紀70年代很多研究院開(kāi)始對路口交通信號燈如何合理、智能控制進(jìn)行研究,開(kāi)始采用計算機技術(shù)對城市干線(xiàn)及區域化交通進(jìn)行控制0.與此同時(shí)全國各地開(kāi)始相繼設立了智能交通工程研究所,交通工程專(zhuān)業(yè)也入選為眾多大學(xué)的特色專(zhuān)業(yè)。通過(guò)多年的不懈努力,國內也取得了- -些研究成果。
目前,我國許多學(xué)者也對路口信號燈控制系統做了大量的研究,取得了一定成果。我國學(xué)者李忠勤,范紅剛等設計了一種單交叉口四相位兩級模糊控制器,由通行相位的優(yōu)先級來(lái)決定路口通行權,提高車(chē)輛通行效率。我國學(xué)者徐欣提出和設計了兩級加權神經(jīng)網(wǎng)絡(luò )對城市控制器對單路口進(jìn)行實(shí)時(shí)控制。我國學(xué)者盧守峰,韋欽平等對交叉口信號配時(shí)的離線(xiàn)Q學(xué)習模型進(jìn)行了研究川。各個(gè)高校及研究院也取得一定的研究成果:如上海交通大學(xué)研發(fā)的SUATS自適應交通信號管理系統,該系統通過(guò)預先制定多個(gè)交通信號控制策略,可以根據不同時(shí)間段的交通需求變換相位以及配時(shí)方案,滿(mǎn)足每個(gè)時(shí)間段的車(chē)輛通行時(shí)長(cháng)的需求。中科院的--個(gè)研發(fā)團隊針對國內交通流特點(diǎn),通過(guò)在城市道路地下掩埋車(chē)輛感應系統來(lái)獲取路口各個(gè)方向的車(chē)流量,通過(guò)對車(chē)流量數據進(jìn)行算法分析、處理,僂路口交通燈可以根據車(chē)輛的密度自動(dòng)調節紅綠燈時(shí)長(cháng)以及信號周期。西北工業(yè)大學(xué)研發(fā)的XATM同屬于自適應信號控制系統,該系統通過(guò)對算法進(jìn)行優(yōu)化,同樣達到了良好的控制效果。目前交通控制系統都是根據實(shí)時(shí)的交通流狀況從而對信號燈進(jìn)行調控,系統功能特性還有待提高:例如交通流參數信息的采集較為單一,沒(méi)有考慮多種交通參數共同作用實(shí)現對交通信號燈配時(shí)的優(yōu)化:交通信號控制算法的性能有待提高,- 定程度上克服了傳統控制方法的局限性,使整個(gè)交通控制系統具有自適應,自學(xué)習能力,可以適用于各種交通路口。
從整體上而言,我國交通信號控制系統的發(fā)展明顯落后于其它發(fā)達國家。交通控制理論與技術(shù)發(fā)展不夠成熟,引進(jìn)的交通系統不能很好的適用于國內交通狀況。
我國的交通信號控制系統還雷要進(jìn)行深入的研究并取得更商的發(fā)展。
1.3課題主要研究?jì)热?/strong>
通過(guò)對如今道路交通路況進(jìn)行充分的分析、調研。在突破傳統機械的定時(shí)控制模式的基礎。上。將模棚控制算法應用于交通管理系統中,并且在模糊控制基礎上引入神經(jīng)網(wǎng)絡(luò )算法,增加整個(gè)交通系統的自學(xué)習能力。更好的適應路口交通流的變化。本課題所研究的智能交通系統能夠根據實(shí)時(shí)的交通路況信息對交通信號燈進(jìn)行智能管理,實(shí)時(shí)的交通路況信息將通過(guò)交通參數反映。因此將通過(guò)基于機器視覺(jué)技術(shù),運用多種圖像處理算法來(lái)獲取準確的交通參數。將采集到的交通參數作為模糊神經(jīng)網(wǎng)絡(luò )算法的輸入參數,根據實(shí)際采集到的樣本數據進(jìn)行訓練自動(dòng)生成模糊規則,由輸入的交通參數進(jìn)行模糊推理得到交通控制策略,然后對路口信號燈進(jìn)行智能調控。實(shí)現路口車(chē)輛的有效通行。為了確定本課題所研究的智能交通信息系統是否能夠達到預期效果,還需對系統功能進(jìn)行測試和分析。課題主要研究?jì)热萑缦滤荆?/p>
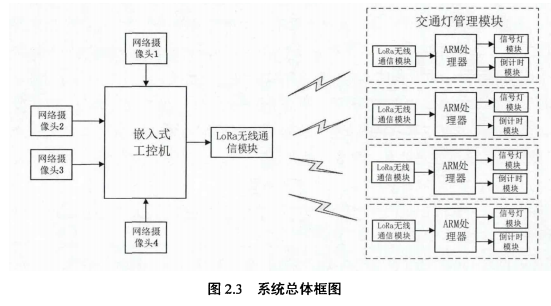
(1)系統總體方案設計通過(guò)對系統整體需求和現如今的路口交通狀況進(jìn)行分析,并結合相關(guān)技術(shù)的研究,最終確立了基于機器視覺(jué)的多交通參數采集,將模糊神經(jīng)網(wǎng)絡(luò )算法做為智能交通控制系統的核心,采用選程低功耗無(wú)線(xiàn)傳輸模塊LoRa實(shí)現交通信息處理部分與交通燈管理部分之間的通信,ARM處理器作為交通燈管理部分的核心處理器,將對交通燈模塊進(jìn)行亮滅與配時(shí)。
(2)交通信息系統硬件平臺的設計本課題所研究的智能交通信息系統的硬件部分主要由嵌入式工控機、網(wǎng)絡(luò )攝像頭、LoRa無(wú)線(xiàn)通信模塊、ARM處理器。液晶顯示模塊、交通燈模塊六個(gè)部分構成。共同組建整個(gè)系統硬件平臺。
(3)機器視覺(jué)交通參數檢測技術(shù)研究交通參數的采集為智能交通控制提供了可靠的交通數據,是智能交通信息系統首先要解決的問(wèn)題。機器視覺(jué)交通參數采集技術(shù)是智能交通領(lǐng)域的重要研究?jì)热荩⑶乙云浞乔秩胧奖O控,檢測范圍廣,采集交通參數豐富,可直觀(guān)回潮歷史交通信息和事件等優(yōu)點(diǎn)已經(jīng)成為現代智能交通系統的不可或缺的部分。
(4)智能交通控制算法研究與實(shí)現本課題在對路口交通控制類(lèi)型研究基礎上,將模糊控制算法應用于交叉路口信號燈管理系統中,通過(guò)研究分析發(fā)現該算法存在的不足,最終通過(guò)將神經(jīng)網(wǎng)絡(luò )算法融入到模糊推理系統中,使整個(gè)交通控制系統具有自適應性,有利于提高智能交通信息系統對交通參數數據的學(xué)習能力以及對交通燈配時(shí)優(yōu)化能力,提高路口通行能力。
(5)交通信息系統軟件設計本課題所研究的智能交通信息系統的軟件程序設計主要包括交通參數采集、智能控制算法軟件設計、無(wú)線(xiàn)數據傳輸、交通燈控制軟件設計,共同實(shí)現了整個(gè)系統功能。
1.4論文結構安排
根據課題的主要研究?jì)热荩疚膶囊韵缕哒聦φn題所涵蓋的內容進(jìn)行介紹:
第一章,緒論。主要介紹了本課題的研究背景以及智能交通領(lǐng)域國內外研究現狀,并簡(jiǎn)要概述本課題要完成的主要內容以及章節安排。
第二章,需求分析及總體方案設計。本章分析了城市路口狀況信息,對現如今的交通控制方式進(jìn)行需求分析,明確課題的研究目標與主要技術(shù)指標,最終制定出系統總體方案,并對相關(guān)技術(shù)進(jìn)行概述。
第三章,機器視覺(jué)交叉路口多交通參數采集。該章節介紹了運用機器視覺(jué)技術(shù)采集車(chē)輛排隊長(cháng)度,車(chē)流量及車(chē)速三個(gè)交通參數并進(jìn)行了詳細的方法研究,對檢測中所運用的相關(guān)技術(shù)進(jìn)行介紹。
第四章,單交叉口交通信號控制算法研究。該章節主要對現如今的交通信號控制系統進(jìn)行分析,將模糊控制算法應用于交通控制系統中。接下來(lái)通過(guò)將神經(jīng)網(wǎng)絡(luò )與模糊控制兩種算法相結合,對模糊控制算法進(jìn)行優(yōu)化。提高整個(gè)交通控制系統性能。最后在matlab平臺上進(jìn)行算法的性能仿真。
第五章,系統硬件平臺搭建及軟件設計。該章節主要完成對智能交通信息系統各個(gè)模塊電路設計。對系統各個(gè)模塊進(jìn)行詳細的介紹說(shuō)明,最終完成對整個(gè)系統平臺的搭建。通。
過(guò)對整個(gè)系統的功能模塊進(jìn)行劃分,完成對各個(gè)功能模塊的軟件設計。
第六章,系統測試及性能分析,該章節主要對整個(gè)系統平臺進(jìn)行搭建,對各個(gè)功能模塊進(jìn)行測試:多交通參數檢測、控制策略功能調試、交通燈配時(shí)校驗。最后對整個(gè)系統的測試結果進(jìn)行數據分析及性能分析。
第七章。結論。總結本課題所完成的研究?jì)热荩瑢χ悄芙煌ㄏ到y后續工作進(jìn)行展望,指明了系統改進(jìn)的方向。
2需求分析及總體方案
2.1路口狀況分析
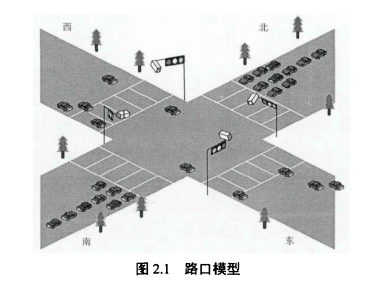
2.1.1路口模型
2.1.2信號相位
2.2需求分析
2.3研究目標
2.4主要技術(shù)指標
2.5總體方案設計
2.6系統中的關(guān)鍵技術(shù)
2.6.1 OpenCV機器視覺(jué)技術(shù)
2.6.2模糊神經(jīng)網(wǎng)絡(luò )算法
2.6.3 LORA無(wú)線(xiàn)傳輸技…
2.7本章小結
3機器視覺(jué)交叉路口多交通參數采集
3.1機器視覺(jué)車(chē)輛檢測技術(shù)概述
3.2車(chē)輛排隊長(cháng)度檢測…
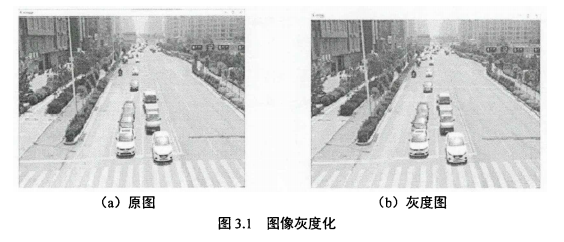
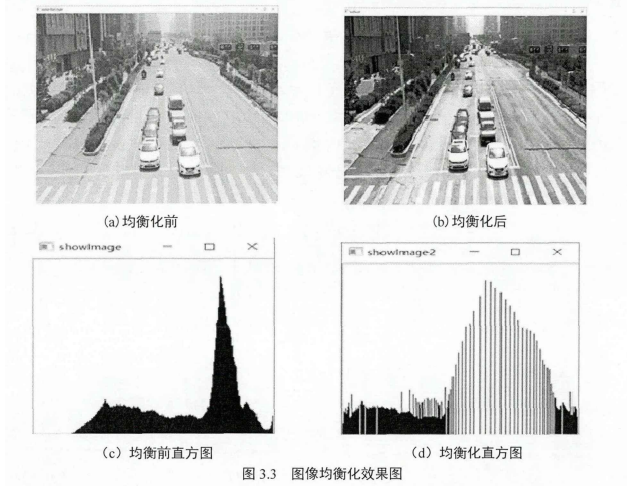
3.2.1圖像預處理
3.2.2獲取ROI.
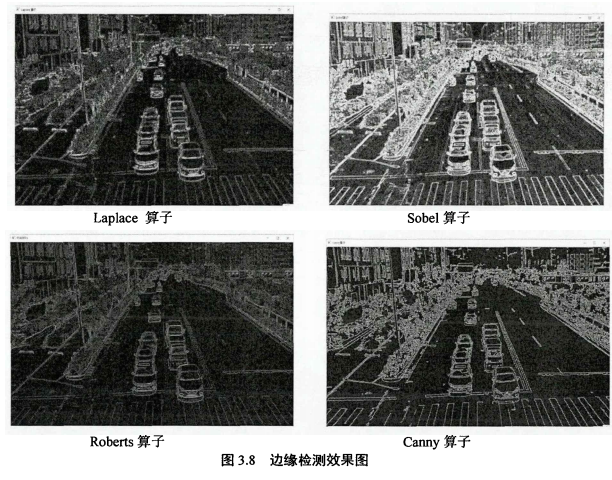
3.2.3車(chē)輛運動(dòng)檢測
3.2.4車(chē)輛存在檢測
3.2.5像素統計
3.2.6確定空間隊列長(cháng)度
3.3車(chē)流量及車(chē)速檢測
3.3.1背景差分運動(dòng)目標檢測
3.3.2基于虛擬線(xiàn)圈車(chē)流量檢測…
3.3.3基于虛擬線(xiàn)圈車(chē)速檢測
3.4本章小結
4單交叉口交通信號控制算法研
4.1交通信號的控制類(lèi)型
4.2交通信號模糊控制算法研…
4.2.1交通信號模糊控制思想
4.2.2單交叉口模糊控制結構設計
4.2.3單交叉口模糊控制器的設計
4.3路口交通模糊控制器優(yōu)化的必要…
4.3.1模糊控制存在的問(wèn)題及解決辦法
4.3.2控制優(yōu)化對象
4.3.3神經(jīng)網(wǎng)絡(luò )與模糊控制系統的協(xié)同機制
4.4模糊神經(jīng)網(wǎng)絡(luò )的系統結構
4.5 ANFIS模糊神經(jīng)網(wǎng)絡(luò )的交通信號控制性能
4.5.1通行效率評價(jià)指標
4.5.2模糊神經(jīng)網(wǎng)絡(luò )推理系統建立
4.5.3仿真結果及分析
4.6本章小結
5系統硬件平臺搭建及軟件設計
5.1系統硬件平臺搭建
5.1.1嵌入式工控機系統架構
5.1.2網(wǎng)絡(luò )攝像頭系統架構
5.1 .3 STM32主控模塊原理圖設計
5.1.4 TFTLCD液晶顯示模塊設計
5.1.5 LoRa模塊電路設計
5.2系統軟件程序設計
5.2.1軟件開(kāi)發(fā)環(huán)境的介紹
5.2.2系統主程序
5.2.3多交通參數采集軟件設計
5.2.4控制算法軟件設計
5.2.5 LoRa模塊無(wú)線(xiàn)收發(fā)軟件設計
5.2.6交通燈控制軟件設計
5.3本章小結
6系統測試及性能分析
6.1智能交通信息系統平臺搭建
6.2機器視覺(jué)的多交通參數檢測
6.3交通信號燈控制策略功能調
6.4交通燈模塊配時(shí)校驗
6.5系統性能分析
6.6本章小結
7結論
7.1工作總結
課題通過(guò)對現有的路口交通狀況信息進(jìn)行分析。對交通控制系統存在的問(wèn)題進(jìn)行闡述,最終確定以圖像處理技術(shù)。嵌入式軟/硬件技術(shù),智能控制技術(shù),無(wú)線(xiàn)通信技術(shù)為基礎,設計出一一套針對于單交叉路口的智能交通信息系統,旨在對路口信號燈進(jìn)行優(yōu)化,緩解路口擁堵問(wèn)題。本課題主要通過(guò)網(wǎng)絡(luò )攝像頭采集路口交通視頰流圖像,運用多種圖像處理算法得到多個(gè)交通參數。將模糊控制與神經(jīng)網(wǎng)絡(luò )算法相結合,運用智能控制技術(shù)對單個(gè)路口四個(gè)方向交通燈進(jìn)行實(shí)時(shí)智能調控。
(a)課題主要研究成果有:
(I)完成了系統方案設計。通過(guò)對實(shí)際單交叉路口進(jìn)行現場(chǎng)觀(guān)察和查閱相關(guān)資料,確定實(shí)現方案,從方法和理論研究證明其可行性:通過(guò)對課題需求分析,功能模塊類(lèi)型選取,對整個(gè)系統進(jìn)行方案設計(2)完成了交通參數的采集。本課題通過(guò)運用機器視覺(jué)技術(shù),對路口攝像頭采集到的視頻流圖像車(chē)道區城進(jìn)行提取,通過(guò)對車(chē)道內的排隊車(chē)輛進(jìn)行運動(dòng)以及存在檢測來(lái)獲得隊尾位置,借助攝像機標定技術(shù)得到實(shí)際三維空間的隊列長(cháng)度:運用基于虛擬線(xiàn)圈車(chē)輛檢測技術(shù),完成了對車(chē)流量和車(chē)輛行駛速度的檢測。
(3)模糊神經(jīng)網(wǎng)絡(luò )算法研究與實(shí)現。課題首先將模糊控制算法應用于交通控制系統中去,對交通管理起到優(yōu)化的效果。通過(guò)對算法進(jìn)行理論分析。發(fā)現其存在的不足,缺乏自組織學(xué)習的能力。因此,借助神經(jīng)網(wǎng)絡(luò )算法具有自學(xué)習的功能,將對模糊控制系統進(jìn)行優(yōu)化。通過(guò)訓練采集到的樣本數據以及學(xué)習原始的模糊推理系統,修正網(wǎng)絡(luò )權值及相關(guān)參數,自動(dòng)生成隸屬度的數與模糊控制規則,使模糊神經(jīng)網(wǎng)絡(luò )模型更適應于現如今的交通管理系統。
(4)完成了交通燈控制模塊設計。以ARM處理器STM32F103作為交通燈控制模塊的主控制器。通過(guò)LoRa無(wú)線(xiàn)通信模塊實(shí)現了交通信恩處理模塊與交通燈控制模塊之間的酒信。交通燈控制模塊接收路口交通控制策略幀數據,通過(guò)解析獲取相位數及綠燈時(shí)長(cháng),從而對路口交通燈進(jìn)行調控。
(5)完成系統測試。首先對各個(gè)單元模塊進(jìn)行功能測試,機器視覺(jué)的多交通參數檢測,交通信號燈控制策略功能調試,交通燈模塊配時(shí)校驗,最后完成了整個(gè)系統功能測試以及性能分析。
(b)課題主要研究結論有:
由系統的功能測試與實(shí)驗數據顯示,課題所研究、設計的智能交通信息系統優(yōu)化了路口信號燈的配時(shí),達到了提高路口通行能力的效果。在功能上實(shí)現了對交叉路口的信號燈配時(shí)優(yōu)化,在性能上通過(guò)MATLAB平臺上驗證了算法的可行性。
7.2后續工作展望
本課題能夠實(shí)現智能交通信息系統的交通參數采集、智能控制算法的實(shí)現、LoRa 無(wú)線(xiàn)數據傳輸、交通燈的協(xié)調控制,也通過(guò)實(shí)例驗證了本課題所設計的智能交通信息系統具有很好的靈活性、協(xié)調性以及自學(xué)習能力。為了使本課題所研究的智能交通信息系統可以更好的應用與推廣。還需要對系統中存在的不足進(jìn)行完善,主要有以下方面:
(1)交通參數檢測的準確度不高,還需要對檢測算法進(jìn)行改進(jìn),更加適應交通路口復雜的環(huán)境。
(2)模糊神經(jīng)網(wǎng)絡(luò )算法的訓練樣本數據不足。將對- - 天中不同時(shí)間段迷行大量交通參數的采集,進(jìn)一步提高算法對路口交通控制性能。
(3)對系統硬件平臺進(jìn)行改進(jìn),運用更加高性能的處理模塊。
參考文獻
[1]張立成,蔣楠,杭亦文。基于視頻控制的智能交通燈[J].電子測量技術(shù)。2011, 34(06) :30-32+36.
[2]邱祥。基于神經(jīng)網(wǎng)絡(luò )的智能交通控制系統設計[D].揚州大學(xué), 2016.
[3]曾松林。城市單交叉路口交通信號的控制方法研究[D].西南交通大學(xué),2013.
[4]沈振乾,基于機器視覺(jué)的交叉路口智能交通燈控制關(guān)鍵技術(shù)研究[DI.天津工業(yè)大學(xué),2014.
[5]祝超越。城市交叉口交通信號的模糊控制方法研究[D]杭州電子科技大學(xué),2014.
[6]楊華,張瑩十字路口交通燈控制系統的設計與實(shí)現[小實(shí)驗室科學(xué)2015.1805)11-13.
[7]C.Pappis, and E.Mamdani. Fuzzy Logie Contoller For A Traffc Junction[J]. IEEETransactions on SMC, 2014.7(10):707-717.
[8]蔡道方。嵌入式智能交通信號控制系統的研究與實(shí)現[D]南京理工大學(xué),2012.
[9]薛小平。交通紅綠燈控制算法設計與實(shí)現[D].古林大學(xué)2015.
[10]趙建玉郭仲林,鄭顯臣基于模糊邏輯的單交叉0交通信號控制方法設計及實(shí)現川,交通信息與安金2013,31(05);131-135.
[I]李洪中。基于模糊控制的智能交通燈系統的研究與設計[D]蘭州交通大學(xué),2013.
[12]梅婧。基于圖像處理及嵌入式系統的交通燈智能控制[D].東華大學(xué),2014.
[13]羅金玲,城市單交叉路口交通信號的控制方法研究小電腦編程技巧與維護201608)44-45+51.
[14] B.Jarboui, N.Damak, PSiamry.A combinatorial particle swarm optimization for solvingmulti-mode resource constrained project scheduling problems[J] Applied Mathematies andCompuation, 2013.195:299.308.
[15]李世林。基子視頻的道路交通參數提取方法研究[D]重慶大學(xué),2014.
[16] Xiying Li, Yongye She, Donghua Luo, Zhi Yu. A tafi state detection tool for feewayvideo srvillance steme/],Procedia-socia and Behavioral Sciences.2013.96:2543-2461.
[17] Skander Soltani. On the use of the wavelet decomposition for time series predictionNeurocomputing.2012:267-277.
[18]謝發(fā)榮。基于A(yíng)RM嵌入式圖像分析的交通信號燈智能控制的研究[D].昆明理工大學(xué),2013.
[19]許嘩,基于視頻的交通流檢測算法研究及系統實(shí)現[D].揚州大學(xué),2013.
[20]劉富強張姍姍,朱文紅,李志鵬。一種 基于視覺(jué)的車(chē)道線(xiàn)檢測與跟蹤算法([].同濟大學(xué)學(xué)擷(自然科學(xué)版)203802)223-229+306.
[21]胡永強周書(shū)民,孫尚清基于STM32的交通燈設計[].電子質(zhì)量:201703):96 100+107.
[22]趙娜,袁家斌,徐晗。智能交通系統綜述[D].計算機科學(xué)201.4.1411)-11+45.
[23]陶萬(wàn)杰。基于視頻處理的車(chē)輛排隊長(cháng)度檢測算法的研究與應用[D)]北京郵電大學(xué),2015.
[24] Wei Zhan, Xiaolong Ji. Algorithm Research on moving vehicles detectioto[].ProcediaEnineing.20115:5483-5487.
[25]白利芳。城市單交叉路口信號控制方法研究[D].大連海事大學(xué),2011.
[26]須嘯海。嵌入式智能交通車(chē)流量監控系統的實(shí)現[D]電子科技大學(xué),2015.
[27]刁磊。4G網(wǎng)絡(luò )下的智能交通系統[].數字技術(shù)與應用。2014(09):29-30.
[28]肖磊基于圖像處理及嵌入式系統的交通燈智能控制研究[)]科技風(fēng)2017(09);99.
[29] Liu Zhi yong, LI Shuiyou. Arifcial neural networks self: turming predictive control fortaffe signals(J].Control Theory& Application,2013.206-932-936.
[30]周先文,基于模糊神經(jīng)網(wǎng)絡(luò )的智能交通信號研究[D].西華大學(xué), 2012.
[31]雒冰,單點(diǎn)信號交叉口智能控制的優(yōu)化模型和方法研究[D].北京交通大學(xué), 2017.
[32]陳小紅,錢(qián)大琳,石冬花。基于慢行交通的交叉口信號配時(shí)多目標優(yōu)化模型[D]交通運輸系統工程與信息2011.102);106-111.
[33]劉金明。基于多目標規劃的城市道路交叉口信號配時(shí)研究[D].北京交通大學(xué),2011.
[34]李敏。城市單交叉口信號控制算法研究與仿真實(shí)現[D].西南交通大學(xué),2011.
[35]王一鳴,鄧璨,鄧高旭。基于模糊控制的智能交通信號控制系統設計[J]電子科技2017308)-84-87+ 141.
[36]彭飛城市道路平面交叉口信號配時(shí)優(yōu)化與仿真研究[D].北京交通大學(xué),2012.
[37]趙潤林,朱銘琳。單點(diǎn)交通信號控制系統的優(yōu)化設計[辦。計算機工程與科學(xué),2012,3411):158-162.
[38]禹翔。城市交叉路口交通燈控制系統的設計研完[D]長(cháng)安大學(xué),2011.
[39]孟首業(yè)基于Linux的城市智能交通信號控制機的優(yōu)化實(shí)現[D].東南大學(xué)2017.
[40]楊奕聰。基于WSN的智能交通管理系統設計與研究[D)。北京郵電大學(xué),2017.
[41]郭煒杰,包曉安。單交叉路口交通燈實(shí)時(shí)配時(shí)算法的研究小工業(yè)控制計算機2012,25(03)34-36.
[42]王新元,高云紅,劉丹。基于機器視覺(jué)的交通燈智能控制系統設計[I].自動(dòng)化應用2015011):38-39+83.
[43]董海龍基于動(dòng)態(tài)模糊神經(jīng)網(wǎng)絡(luò )的交通信號智能控制研究[DI.蘭州交通大學(xué),2017.
致謝
本論文是在導師任安虎副教授以及校外導師胡志開(kāi)老師的悉心指導之下完成的。三年來(lái),導師們淵博的專(zhuān)業(yè)知識,嚴謹的治學(xué)態(tài)度,精益求精的工作作風(fēng),誨人不倦的高尚師德,樸實(shí)無(wú)華、平易近人的人格魅力對我影響深遠。他們不僅授我以文,而且教我做人,雖歷時(shí)三載。卻賦子我終生受益無(wú)窮之道。本論文從選題到完成,每一-步都是在導師們的指導下完成的,傾注了他們大量的心血,在此我向我的導師任安虎副教授以及校外導師胡志開(kāi)老師表示深切的謝意與祝禰!
感謝那些在我研究生生涯中給予教導、關(guān)心和幫助的人們。感謝我的同學(xué)們,感謝他們在生活中。學(xué)習上給子的幫助:感謝我的室友,他們總是對我包容、禮讓與關(guān)心,在我困難時(shí),給子心理上的安慰。在此還要對實(shí)驗室所有師兄弟姐妹們在平時(shí)開(kāi)展相關(guān)工作中的支持和幫助表示感謝。最后要感謝我的父母及家人,你們默默的支持是我求學(xué)三年來(lái)不斷努力向前的動(dòng)力.
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)