24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
隨著(zhù)我國經(jīng)濟的快速發(fā)展以及城市化進(jìn)程的加快,近年各大城市機動(dòng)車(chē)數量急劇增加,交通問(wèn)題已成為亟待解決的民生問(wèn)題之一一。城市交通系統的道路車(chē)輛流量具有較大的時(shí)變性和隨機性,傳統交叉口信號燈控制方法已難以滿(mǎn)足交叉路口的通行量、疏導時(shí)間等需求。
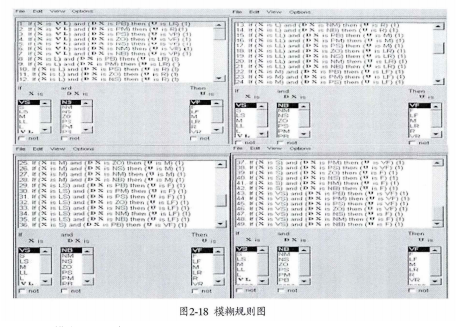
針對這一問(wèn)題,引入模糊邏輯算法,設計了一種實(shí)時(shí)的智能交通信號控制系統。該系統利用車(chē)輛計數傳感器獲得各路口的車(chē)流量,根據交叉路口現狀設計了一個(gè)單變量二維模糊邏輯控制器。該控制器以等待車(chē)輛數量和交叉方向等待車(chē)輛數量之差作為輸入,綠燈延時(shí)作為輸出。其中,模糊控制規則表在離線(xiàn)狀態(tài)下轉化為查詢(xún)表,并存儲于計算機中以供系統在線(xiàn)查詢(xún)。實(shí)際應用時(shí),系統通過(guò)查表根據路口等待車(chē)輛數量變化自動(dòng)調節綠燈時(shí)間。
本文提出了該智能交通信號控制系統的軟硬件設計方案。系統以AT89S52單片機為核心,利用Intel8279 芯片為鍵盤(pán)及顯示器接口電路,采用C語(yǔ)言開(kāi)發(fā)了具有交通燈控制、功率驅動(dòng)、綠切等功能的交通燈模糊邏輯控制器。
采用路口交通實(shí)例,對兩種不同信號控制方式進(jìn)行仿真實(shí)驗和現場(chǎng)測量比較。試驗結果表明感應控制方式優(yōu)于多時(shí)段定周期控制,在交叉口流量較小的情況下表現得更突出。雖然實(shí)時(shí)交通數據和狀況的不斷地更新,但實(shí)時(shí)模糊控制系統仍能保證最優(yōu)的交叉路口利用率,縮短了車(chē)輛平均等待延誤時(shí)間。
關(guān)鍵詞:交叉路口交通燈:模糊控制;車(chē)輛平均等待延誤;單片機控制系統

abstract
With the rapid development of China's economy and the acceleration of urbanization, the number of motor vehicles in major cities has increased dramatically in recent years, and the traffic problem has become one of the livelihood problems that need to be solved urgently. The traffic flow of urban traffic system has great time-varying and randomness, and the traditional intersection signal control method has been difficult to meet the traffic volume, dredging time and other needs of the intersection.
To solve this problem, a real-time intelligent traffic signal control system is designed by introducing fuzzy logic algorithm. The system uses the vehicle counting sensor to get the traffic flow of each intersection, and designs a single variable two-dimensional fuzzy logic controller according to the current situation of the intersection. The controller takes the difference between the number of waiting vehicles and the number of waiting vehicles in the cross direction as the input and the green light delay as the output. Among them, the fuzzy control rule table is transformed into a query table in the offline state, and stored in the computer for the system online query. In practical application, the system can automatically adjust the green time according to the number of waiting vehicles at the intersection.
In this paper, the hardware and software design of the intelligent traffic signal control system is proposed. The system takes AT89S52 as the core, Intel8279 as the keyboard and display interface circuit, and C language is used to develop the traffic light fuzzy logic controller with the functions of traffic light control, power drive, green cut and so on.
Two different signal control methods are simulated and compared with the field measurement by using an intersection traffic example. The experimental results show that the induction control is better than the multi-time periodic control, and it is more prominent when the intersection flow is small. Although the real-time traffic data and conditions are constantly updated, the real-time fuzzy control system can still ensure the optimal utilization ratio of intersections and shorten the average waiting time of vehicles.
Key words: intersection traffic light: fuzzy control; average waiting delay of vehicles; single chip microcomputer control system
目錄
第一章緒論
1.1問(wèn)題的來(lái)源及背景
本論文研究?jì)热輥?lái)自長(cháng)沙市城區交通疏導工程項目。2008年至2010年是長(cháng)沙市交通疏導工程的重點(diǎn)攻堅建設階段,政府計劃通過(guò)三年交通疏導工程建設達到提高城區道路交通通行能力的目的。實(shí)施交通疏導工程項目一方面是加強道路的建設和改造。另-方面是完普道路智能交通控制系統。車(chē)站北路交通疏導工程是長(cháng)沙市第二期交通疏導工程中的重點(diǎn)工程,其位于長(cháng)沙市芙蓉區,長(cháng)沙火車(chē)站北邊。車(chē)站北路車(chē)流人流非常大,經(jīng)常堵車(chē),影響了市民的正常工作和生活。特別是營(yíng)盤(pán)路與車(chē)站北路相交的+字路口,經(jīng)常造成堵車(chē),是此次交通疏導工程的重點(diǎn)。工程完成后營(yíng)盤(pán)路與車(chē)站北路交叉路口使用了智能交通控制系統,該控制系統具有實(shí)時(shí)自適應協(xié)調能力、自感應智能控制、無(wú)線(xiàn)纜協(xié)調控制、降級運行等功能,車(chē)輛檢測器能夠自動(dòng)檢測路口車(chē)輛狀態(tài)信息,送給路口交通信號控制器,并通過(guò)通信傳輸到區域計算機。
本文根據交叉路口交通信號控制系統的要求。采用車(chē)輛計數傳感器以及單片機為核心的硬件電路,總結交通警察指揮交通的經(jīng)驗,運用模糊控制理論,實(shí)現了交叉路口交通信號模糊控制系統。
1.2交叉路口智能交通控制系統的研究意義
智能交通系統(ITS,iellieant transport system)是指人們將先進(jìn)的信息技術(shù)。
數據通信傳輸技術(shù)。電子控制技術(shù)。傳感器技術(shù)以及計算機處理技術(shù)等有效地綜合運用于整個(gè)運輸體系中,從而建立起的一種在大范圍內、全方位發(fā)揮作用的實(shí)時(shí)、準確、高效的運輸綜合管理系統-刊。
當前我國大多數城市的平均行車(chē)速度已降至20km/h以下,同時(shí),由于車(chē)輛速度過(guò)慢、尾氣排放增加,使得城市的空氣質(zhì)量進(jìn)一步忍化。為緩解經(jīng)濟發(fā)展給交通運輸帶來(lái)的壓力。使現有資源發(fā)揮出最大的作用,我國政府加大了智能交通系統的研究和建設力度。采用智能交通系統的交叉口具有兩大優(yōu)點(diǎn):
首先。有效提高交通運輸效益,使交通擁擠降低20%,延誤損失減少10~25%.車(chē)禍降低50~ 80%,油料消耗減少30%;其次,對解決道路交通堵塞、減少財產(chǎn)損失、減少環(huán)境污染,增強交通安全性,合理利用土地與能源1.
交叉路口城市機動(dòng)車(chē)輛的不斷增加,使得車(chē)輛堵寫(xiě)現象越來(lái)越嚴重。當前大部分城市仍然采用的定時(shí)控制十字路口交通燈的控制方法。交通控制就是確定交叉口紅綠燈的信號配時(shí),使通過(guò)交叉口的車(chē)輛延誤盡可能小。傳統的控制-一般是采用模型控制或預先人為地設定多套方案,由于道路上的車(chē)流量具有較大的隨機性,所實(shí)施的相位控制也應隨車(chē)流量的不同而相應變化,但是交通警察在實(shí)際的交通指揮中可以根據實(shí)際情況來(lái)控制交通,如果東西方向的車(chē)流量大,則其放行時(shí)間長(cháng):南北方向車(chē)流量小,則其放行時(shí)間短則。
模糊控制理論在交通系統中的應用模仿了交警的控制經(jīng)驗實(shí)現智能控制,可以使車(chē)輛等特延誤時(shí)間最小因此基于模棚控制理論的交叉路口信號燈控制系統的研究對解決交叉路口車(chē)輛堵塞有重要的現實(shí)意義。
1.3國內外交通信號控制系統的研究現狀
早在十九世紀的工業(yè)革命時(shí)期,出于然汽機的發(fā)明,交通工具隨之機械化和現代化,缺乏交通控制手段的城市道路、交叉利口等交通設施已難以負荷銳增的車(chē)流量和人流量。人們逐漸意識到交通信號對城市通行能力的重要作用,并著(zhù)手研究交通信號對車(chē)輛出入交叉口的控制。
隨著(zhù)科技的飛速發(fā)展,以及交通規律和運行機理的深入研究,交通信號控制系統取得'了飛躍性的發(fā)展。其發(fā)展方向可通過(guò)四個(gè)角度進(jìn)行劃分:從系統的控制范國來(lái)看,可分為單點(diǎn)信號控制、干道信號控制以及區域信號協(xié)調控制:從系統的硬件設備來(lái)看,其經(jīng)歷了機械控制、點(diǎn)擊控制,電子控制以及計算機控制系統: .
從系統的控制方法來(lái)看,由最先的固定式信號控制,發(fā)展到感應式信號控制,再到自適應信號控制:從系統的配時(shí)方式來(lái)看,自原始的人工配時(shí)發(fā)展為以計算機脫機技術(shù)和計算機聯(lián)機技術(shù)為主的智能配時(shí)階段回。
1.3.1國外交通信號控制系統的研究現狀
作為工業(yè)革命的發(fā)源地的英國首先意識到交叉口在城市交通中的樞紐地位以及交通信號對交叉口通行能力的重要作用。1868年, 英國的J. P. Knight發(fā)明了一種紅綠兩色壁板式燃氣信號燈,并將其運用于倫敦Westminster街口。這次創(chuàng )舉標志著(zhù)交通信號燈的問(wèn)世。繼英園之后,美國人在1918年發(fā)明了-種手動(dòng)控制的三色信號燈,并安裝在紐約街頭使用,這就是現代交通信號燈的雛形叫。
汽車(chē)行業(yè)的迅猛發(fā)展,傳統的手動(dòng)控制信號燈已難以滿(mǎn)足交叉口的通行需求。人們開(kāi)始通過(guò)其他工程領(lǐng)域的技術(shù)方法改進(jìn)交通信號的控制問(wèn)題。英國人于1926年設計了一種機械式交通信號燈,并安裝在Wolverhampton街口使用叫。該信號燈結構簡(jiǎn)單,通過(guò)對紅綠燈單時(shí)段定周期的切換實(shí)現車(chē)輛通行控制。這種機械式紅綠燈在歷史上首次實(shí)現了對交通信號的自動(dòng)控制標志著(zhù)城市交通控制系線(xiàn)的誕生。
1928年,美國成功試制了世界上第一臺感應式信號機,首次將檢測器應用于交通信號控制系統中2I.
隨著(zhù)對道路交通、交叉口通行規律的深入研究,人們意識到對各個(gè)交叉口的孤立控制違背了城市交通系統的整體性,與車(chē)流在交通系統中時(shí)空連續性相矛盾。美國于1917年提出了世界上第一個(gè)干道信號協(xié)調控制系統,該系統在鹽湖實(shí)施運用,可同時(shí)控制6個(gè)交叉口的交通流動(dòng)。但是,該系統仍然是屬于手動(dòng)控制范疇內。1992年,美國體斯頓市采用了一種可控制12個(gè)交叉口交通信號系統,它通過(guò)電子自動(dòng)計時(shí)器對所有的交叉口進(jìn)行聯(lián)動(dòng)控制。自此。交通信號控制系統在美國蓬勃發(fā)展起來(lái)4.
感應技術(shù)以及電子計算機的發(fā)展給交通信號控制系統注入了新的活力。美國丹佛市在1952年將模擬電子計算機引入交通信號控制系統中159,該系統通過(guò)車(chē)輛控制器感應交叉口車(chē)流量,并傳遞至控制中心,利用模擬電子計算機進(jìn)行數據處理并調節交叉口信號。這種系統- -經(jīng)面 世就在美國得到了廣泛關(guān)注,十年期間就建立了-百多個(gè)類(lèi)似的系統。
二十世紀六十年代。世界各國紛紛開(kāi)始研究針對大范圍的區城交通信號協(xié)調控制系統,根據各交叉口車(chē)流狀況建立數學(xué)模型,模擬各種交通狀況,并優(yōu)化信號配時(shí)問(wèn)題。1960年,加拿大將數字電子計算機應用于多倫多市的區域交通信號控制,這是世界上第- - 個(gè)中心是交通信號控制系統則。1963年,該系統可控制20個(gè)交叉口,經(jīng)過(guò)十年的改進(jìn),其升級為可控制885個(gè)交叉口的大型交通信號控制系統。加拿大的大型城市交通信號控制系統的運行成功促使了世界各大城市建立了類(lèi)似的城市道路中心式交通控制系統。1966年,英國交通道路研究所研發(fā)了一種交通網(wǎng)絡(luò )研究工具一TRANST系統, 該系統程序主要包含兩個(gè)部分:其-.
交通模型,模擬在紅綠燈控制下的車(chē)輛行駛狀況,并用于交通網(wǎng)絡(luò )運行指標的計算:其二,優(yōu)化過(guò)程,調節信號配時(shí)方案以達到運行指標最優(yōu)狀態(tài)7.TRANST系統是一種離線(xiàn)配時(shí)的交通信號控制方法,該類(lèi)方案的交通信號控制系統還有MAXBAND. PASSER等。
傳統的交通信號控制均采用了離線(xiàn)配時(shí)的控制方式。這類(lèi)方式雖然操作簡(jiǎn)單、可靠,但是隨時(shí)跟蹤交叉口的車(chē)流變化,容易導致綠燈空、紅燈時(shí)間過(guò)長(cháng)等問(wèn)題。因此,交通信號的實(shí)時(shí)在線(xiàn)控制應運而生,其核心為:采用車(chē)輛檢測器實(shí)時(shí)采集交叉路口車(chē)流數據,根據采集的數據在線(xiàn)優(yōu)化信號配時(shí)參數川。
1975年在華盛頓特區適用的第三代智能控制系統采用了CRYANO控制軟件對交叉口交通信號實(shí)時(shí)配時(shí),其根據實(shí)時(shí)采集的交叉口車(chē)流數據,對交通信號的時(shí)間、相位差以及綠信比進(jìn)行周期性的調節,以此改變交叉口的車(chē)流狀況以滿(mǎn)足各個(gè)時(shí)段的交通需求。但這種動(dòng)態(tài)的在線(xiàn)交通控制系統在實(shí)際應用中失敗了1I0.
其原因在f該方法采用的傳統預測方法不能跟蹤交通流變化,其配飾方式因此沒(méi)有改善交叉口的通行狀況。當突發(fā)事件來(lái)臨時(shí)該系統還容易產(chǎn)生錯誤的執行方案。
近幾年,歐盟、美國和日本開(kāi)展的大型ITs研發(fā)計劃反應了車(chē)路- .體化的發(fā)展趨勢。歐盟于2006年提出了合作性車(chē)路基礎設施一體化系統(CooperativeVchice Infastructure Systcm, CVIS),該計劃耗資4400萬(wàn)歐元,主要目的是涉及、開(kāi)發(fā)和測試為了實(shí)現車(chē)輛之間通信以及車(chē)輛與附近的路邊基礎設施之間通信所需的技術(shù),旨在提高旅客和貨物的移動(dòng)性以及道路交通運輸系統的效率。美國交通部2009年啟動(dòng)了ItelliDrive計劃,研究?jì)热葜饕采w了車(chē)載通訊及其安全應用等方面,為美國實(shí)施下一-代ITS的重要戰略目標打下基礎。日本政府目前正在著(zhù)手研發(fā)SMARTWAY智能交通系統,計劃用5年的時(shí)間在重要道路上覆蓋路況認知傳感器、構建智能汽車(chē)系統、智能道路系統、車(chē)路間協(xié)調系統,實(shí)現交通信息的實(shí)時(shí)發(fā)布2.
1.3.2國內交通信號控制系統的研究現狀
相對于我國城市快速增長(cháng)的交通需求,我國交通基礎設施發(fā)展較為緩慢。因此,如何在現有的交通設施的條件下,采用合理的交通控制手段,保證交通的暢通運行是我國交通信號控制領(lǐng)域的研究目標。二十世紀八十年代。我國引入了交叉口信號控制系統的概念。該領(lǐng)域早期的研究方向定位于定時(shí)控制,通過(guò)建立精確的數學(xué)模型反應交叉口交通狀況,井根據模型確定信號配時(shí)方案以及綠信比等信號控制參數".
隨著(zhù)城市交通的發(fā)展,定時(shí)控制方式的缺陷逐斷暴露。由于信號相位。配時(shí)方案等參數既定,不能跟隨交通量的變化,導致交叉口常存在綠燈方向無(wú)車(chē)輛通行,而紅燈方向等待車(chē)輛較多的情況,降低了通行率。目前,我國交通研究者側重于感應式信號控制方式,并結合智能算法,自適應調節交叉口信號,以期合理分配交叉口交通流,減小延誤率。
模糊邏輯算法在交通信號控制系統中應用較為廣鈣。1992年,徐冬玲設計了-種由神經(jīng)網(wǎng)絡(luò )算法優(yōu)化的模糊控制器控制單路口信號燈的變化四21.該方法中,給定了綠燈最短時(shí)間,并且通過(guò)檢測器檢測綠燈方向的等待車(chē)輛,模糊控制器根據等待車(chē)輛調節綠燈的延長(cháng)時(shí)間并決定是否切換相位。相對于Pappis等 人的控制方法而言,該方法具有更快的控制時(shí)間,使得路口每秒通行車(chē)輛得到明顯改善。
沈國江等人采用模糊神經(jīng)網(wǎng)絡(luò )控制方法,井根據分散控制的原則對整個(gè)城市區域的交叉口信號燈進(jìn)行控制。該方法根據相關(guān)交通狀況劃分為許多子區城,這些子區城中的交通信號控制系統作為子系統構成了整個(gè)城市的交通信號控制系統。文中根據分散控制的原理,對每個(gè)交叉口建立一個(gè)模糊神經(jīng)網(wǎng)絡(luò )控制器,分別進(jìn)行優(yōu)化控制,而相鄰的交叉口的信號周期相互平衡21,文中對杭州市的某區域作為對象進(jìn)行仿真,其仿真結果表明采用這種區域劃分協(xié)調控制的信號控制方法能有效改善該區域內交叉口的交通狀況。
1997年。陳洪和陳森發(fā)提出了一種多級模糊控制結構用于單路口信號燈的控制,該方法將影響路口車(chē)流的因素進(jìn)行分類(lèi)劃級,其中兩個(gè)關(guān)鍵相位車(chē)流的數量以及綠燈延遲時(shí)間被設定為多級模糊結構的一級變量,而非關(guān)鍵車(chē)流的數量- -級綵燈延遲時(shí)間作為二級變量。多級模朔控制器根據路口的實(shí)時(shí)交通數據控制綠燈的延遲時(shí)間以及相位切換,因此避免了對交通車(chē)流的預測。具有較好的實(shí)時(shí)性。
采用實(shí)際數據對該模糊控制器進(jìn)行仿真,其結果也表明了該方法的有效性P41.趙晨、胡福喬等撰棄了Pappis的兩相位方法,基于城市交通的實(shí)際情況提出了一種四相位模糊控制方法29.
近年來(lái),其他算法在信號控制系統中也得到了廣泛應用。張宗華等人采用遺傳算法優(yōu)化控制交通網(wǎng)絡(luò )信號。該方法根據美國聯(lián)邦高級公路管理局的交通模擬管理軟件設置信號時(shí)間,采用遺傳算法模擬交通網(wǎng)絡(luò ),獲得延遲時(shí)間,并以此作為對應染色體的適應度評價(jià)值。其中,公路網(wǎng)絡(luò )的一個(gè)交通信號對應遺傳算法中的一個(gè)染色體。采用該方法對三個(gè)路口的信號燈進(jìn)行仿真實(shí)驗,仿真結果證實(shí)了其能有效地聯(lián)動(dòng)控制路口信號燈的變化購。
2003年,宮曉蕉等人提出了一種基于有序樣本聚類(lèi)的交叉口信號控制方法。
該方法結合了感應算法和改進(jìn)的TOD算法的優(yōu)點(diǎn),實(shí)用性強,對兩相位、三相位以及四相位的路口均適用,在不改變交叉口硬件設施的條件下,改善了交通狀況網(wǎng)。
蔣忠遠、宋文等人提出了- -種基于增廣Petri網(wǎng)絡(luò )的交通信號控制系統。該方案結合增廣Petri網(wǎng)絡(luò )與自控技術(shù)。模擬六相位路口狀況,協(xié)調控制-一個(gè)區城內的多個(gè)路口信號29.
龍建成等以動(dòng)態(tài)隨機用花均衡環(huán)境作為研究背景,將元跑傳輸模型引入交叉口信號控制系統中,建立固定信號配時(shí)方法和動(dòng)態(tài)信號配時(shí)方法,協(xié)調控制交叉口各方向車(chē)輛通行狀況啊。
2009年,馬萬(wàn)經(jīng)等人在路段關(guān)聯(lián)計算模型的基礎上,結合交叉口間距、信號相位等因素建立了交叉口信號控制系統叫。通過(guò)仿真對比試驗證明了該改進(jìn)的路段關(guān)聯(lián)計算模型能準確描述交叉口交通狀況,給出最佳通行方案。
馬瑩瑩等結合道路交通控制的多目標性,建立交通信號周期時(shí)長(cháng)多目標優(yōu)化模型,采用多目標連續蟻群算法求解模型。實(shí)現交叉口交通信號優(yōu)化控制。該模型綜合考慮了交叉口的各種交通需求。彌補了傳統交叉口交通指標的單- -性所產(chǎn)生的信號控制方法的缺陷34.
吳明暉等針對單交叉口交通狀況,提出了-種多種智能控制方法結合的交叉口信號控制模型。該模型采用三層BP人工神經(jīng)網(wǎng)絡(luò )預測路口車(chē)輛到達率,以交通流跑和度理論為基礎利用模糊控制器調整交叉口綠燈信號時(shí)間時(shí)。
1.4模糊控制理論及其在交通信號控制系統中的研究現狀
二十世紀初,各國學(xué)者察覺(jué)現實(shí)生活中存在著(zhù)大量的"不清斷"對象,這些對象難以通過(guò)精確地數學(xué)模型進(jìn)行描述。這些對象的存在使得傳統的控制方法難以滿(mǎn)足各個(gè)領(lǐng)域對控制系統的響應速度、穩定性、適應能力以及精讀的要求。因此,如何處理這些隨機的、不確定的對象成為了各研究領(lǐng)域所關(guān)心的熱點(diǎn)。
1965年,加州大學(xué)的Zadch教授基于人類(lèi)的主觀(guān)意識的研究提出了"模糊"這一概念,并給出了模糊集的定義,開(kāi)創(chuàng )了模糊控制理論的先河。該理論采用語(yǔ)宮分析的數學(xué)形式描述難以給出精確數學(xué)定義的實(shí)際對象。由于模糊集、模糊理論的出現,使得"多" 、"少"、"高"、"矮" 這些概念性的語(yǔ)言能直接通過(guò)數學(xué)公式表示,并且由計算機處理。從而對復雜系統做出更加符合實(shí)際的邏輯描述和決策方案3.
模糊理論的出現也引起了交通控制領(lǐng)域的研究者的關(guān)注。城市道路中各個(gè)時(shí)段的車(chē)輛數量的"多"、"少" 以及紅綠燈時(shí)間的"長(cháng)"、"矩" 都屬于模糊概念。相對于經(jīng)典的控制算法。模糊邏輯控制算法能更合理的描述城市交通系統的控制對象。
Pappis 與Mamndani在1977年將模糊邏輯控制方法引入城市單向路口的信號控制中,開(kāi)創(chuàng )了交通信號模糊邏輯控制的新紀元叫。該控制方法每過(guò)10秒鐘系統判斷是否延長(cháng)交叉口的綠燈時(shí)間,并且每次判斷中,模糊邏輯控制器需要處理五條模糊規則。該控制器具有三個(gè)輸入量和一個(gè)輸出量。這三個(gè)輸入量分別為:當前間隔中綠燈所用時(shí)間。在綠燈時(shí)間內該方向通過(guò)路口的車(chē)輛數量、紅燈方向等待的車(chē)輛數量。輸出變量則是綠燈的延長(cháng)時(shí)間。該方法的仿真結果表明。相對于傳統控制方法而言,其平均車(chē)輛延誤率降低了7%左右。
早期的模糊控制理論僅應用于孤立的交叉路口,因此仍不能滿(mǎn)足整個(gè)城市道路作為一個(gè)整體的交通系統的控制需求。1984年, Nakatsuyama將孤立的交叉口交通信號模糊控制擴展到相鄰兩個(gè)單行路口的信號控制中。該控制系統含有兩個(gè)模糊邏輯控制器,其中一個(gè)管理兩個(gè)交叉口車(chē)輛的獨立行使,另外-一個(gè)則用于管理兩個(gè)路口的相位差。該信號控制系統首次應用模糊邏輯控制器解決了多個(gè)交叉口的交迎信號控制問(wèn)題[351.
此后,核糊控制算法在城市交通控制領(lǐng)城中蓬勃發(fā)展起來(lái)。1993年,Skowronski等提出了一種 自學(xué)習的交通信號模糊邏輯控制器,并將其應用于孤立的交叉口,應用結果表明了該控制器的有效性叫。1998年。 Porche等人設計了一種自適應的交通信號模糊邏輯控制方案,該方案采用多層控制的方式,有效解決了城市交通網(wǎng)絡(luò )交叉口車(chē)輛等待延時(shí)問(wèn)題叨。2002年,Chou模報了實(shí)際的交義口的通行狀況,建立了一-種分散式的模糊邏輯控制方案,該方案根據交叉口的通行狀況以及相鄰路口的信號相位狀態(tài)設定所轄路0的信號相位以及延時(shí)時(shí)間測。
2005年,Sazi Murat- 種單交 叉口的模糊控制方法,該控制方法主要完成兩項控制任務(wù):其一,控制綠燈廷時(shí)時(shí)間:其二,決定下-周期的綠燈相位。該方法的仿真實(shí)驗表明其能有效減少交叉口的車(chē)輛延誤時(shí)間叫。
陳淑燕等人針對入口為多車(chē)道的單路口的交通信號燈設計了一種三維模糊控制器。該控制器的根據當前相位的主列隊、最近10秒車(chē)輛到達數量以及后繼相位的主列隊來(lái)調節路口信號時(shí)間。文中采用了交叉口平均車(chē)輛延誤作為評價(jià)指標,并與現有的定周期配飾方式進(jìn)行對比,其對比結果表明該方法明顯優(yōu)于定時(shí)控制方式劃。
丁金婷和吳國忠采用模糊控制的方法對交叉口進(jìn)行控制,并選擇PLC實(shí)現了單路口交通信號系統的硬件結構(*1.馬榆等人采用雙向濾波帶寬最大化的方法建立了相位相序優(yōu)化模型,并將該模型應用于交叉口信號控制系統。采集不同交通狀況"下的15組交叉0數據進(jìn)行仿真實(shí)驗,方正結果表明了該方法能能減少交叉口的延誤率和停車(chē)次數,縮短通行時(shí)間,改善了交叉口的交通環(huán)境|叫。
1.5本文主要研究的內容與結構
營(yíng)盤(pán)路口位于火車(chē)站附近,連接車(chē)流較大的車(chē)站北路與營(yíng)盤(pán)路。是長(cháng)沙市交通流量最大的交叉口之一。近年來(lái),長(cháng)沙市流動(dòng)人口增加,機動(dòng)車(chē)數量成倍增長(cháng),連接兩大城市重點(diǎn)道路的營(yíng)盤(pán)路口的擁堵現象逐漸增加。營(yíng)盤(pán)路口原有的定周期控制方式調節交通信號,僅將交通時(shí)段劃分為高峰時(shí)段與平峰時(shí)段。雖然各段時(shí)期內,交通信號配時(shí)方式各不相同。但在該時(shí)段內,信號配時(shí)方式固定,不能跟隨車(chē)流變化而自動(dòng)調節。上 下班高峰期間,營(yíng)盤(pán)路車(chē)流較往年有了大幅度增加,而原有的信號控制方式在該方向上的綠燈時(shí)間較短,因此,常出現營(yíng)盤(pán)路方向等待車(chē)輛較長(cháng)的情況。而春運期間,由于火車(chē)站流動(dòng)人口增加,車(chē)站北路的車(chē)流量波動(dòng)較大,原有的信號周期固定,常導致車(chē)站北路車(chē)流較大時(shí)等特車(chē)輛過(guò)長(cháng)而車(chē)流較少時(shí)綠燈放空的情況,極不利于交叉口的正常通行。
因此,急需改進(jìn)營(yíng)啟路口的交通信號控制方式,能夠在高峰時(shí)段自動(dòng)增加營(yíng)盤(pán)路的綠燈時(shí)間,而在春運期間內,能跟隨車(chē)站北路車(chē)流的變化自動(dòng)調節交叉口的相位變化,使之能夠全面協(xié)調交叉口各個(gè)方向的車(chē)流狀況,到達證行能力的最優(yōu)狀態(tài)。
針對營(yíng)盤(pán)路口的交通需求,本文設計一種效率高、自適應能力強的交叉口交通信號模糊控制系統,用于實(shí)時(shí)調節交叉口紅綠燈的變化,減少交叉口等待車(chē)輛數量,提高交叉口的通行能力。
本文主要分為五大章節,各章節主要內容如下:
第一章,緒論。該章首先簡(jiǎn)略介紹論文所解決的實(shí)際問(wèn)題及其背景,即車(chē)站北路交叉口的通行狀況和長(cháng)沙市城區交通疏導工程的相關(guān)內容。其次,概述田內外交叉口交通信號控制系用的研究現狀。再次。闡述模糊邏輯算法的發(fā)展過(guò)程以及在智能交通控制系統中的應用。最后,介紹本文的主體內容和結構。
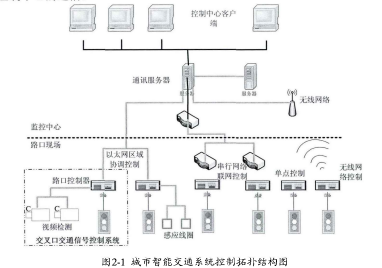
第二章,交叉口交通信號模糊控制器設計。首先,介紹智能交通控制系統的結構以及交叉口交通信號控制系統在該系統中所處的地位與作用。其次,概述交通信號的意義、交通行為及其相應的控制方法。再次,詳細描述交通信號模糊邏輯控制器的原理與結構。由于城市交通的車(chē)流量具有較大的時(shí)變性、非線(xiàn)性以及隨機性,使得系統難以通過(guò)建立精確的數學(xué)模型預知車(chē)流狀況。而模糊算法有別于傳統的控制算法,極其適用于交通過(guò)程中的非線(xiàn)性"模糊"對象。因此本文采用模糊邏輯算法作為交通信號控制器的控制算法,根搦檢測的交叉口等待車(chē)輛的數量查表獲得匹配的緣燈延時(shí)時(shí)間,井調節交叉口車(chē)輛通行狀況。最后,利用車(chē)站北路交叉口的歷史數據,分別對該路口原有的信號控制方式和本文設計的控制器仿真,并對仿真結果對比分析第三章。交叉口交通信號控制系統軟軟硬件設計。針對城市道路較為惡劣的設施環(huán)境,采用性?xún)r(jià)比較高。執行簡(jiǎn)單的單片機作為主體芯片。設計實(shí)時(shí)性高、無(wú)誤操作的硬件方案。根據信號控制系統的軟件需求,設計鍵盤(pán)中斷程序、車(chē)流量檢測程序、模糊推理查表程序等的流程圖。
第四章,交叉口交通信號燈控制系統測試。該章首先介紹幾種交叉口運行質(zhì)量的評價(jià)標準。然后通過(guò)這些評價(jià)指標對已投入使用的交叉口交通信號燈控制系統進(jìn)行分析,并給出相應的分析結果。
第五章,結論與展望。該章總結全文,并對進(jìn)一步的研究方向進(jìn)行展望.

第二章交叉口交通信號模糊控制器設計
2.1智能交通控制系統概述
22交叉口交通信號及控制方式
2.2.1交通信號以及通行行為概述
2.2.2交通信號術(shù)語(yǔ)
2.3交通信號燈控制方式
2.4交叉口交通信號相位控制
2.3模糊控制器設計
23.1模糊控制理論
23.2模糊控制系統的組成及原理
23.3模糊控制器
2.4交叉口交通信號模糊控制器仿真及結果分析
2.5小結
第三章交叉口交通信號控制系統軟硬件設計
3.1交通控制系統硬件設計
3.1.2看門(mén)狗電路
3.15應急控制電路
3.1.6鍵盤(pán)與顯示電路
3.1.7通訊接口
3.1.8功率驅動(dòng)電路
3.2交通控制系統軟件設計。
3.2.1軟件定時(shí)方式選擇
3.22系統程序設計
3.3小結
第四章交叉路口交通信號燈控制系統測試
4.1通行能力評價(jià)指標。
4.2評價(jià)方法
4.3實(shí)際結果分析
4.4小結
第五章結論與展望
5.1結論
本文采用模朔控制理論來(lái)設計交通燈實(shí)時(shí)控制系統,以單片機為處理核心。
采用傳感器進(jìn)行車(chē)輛計數、8279接口芯片等外國電路,用軟件編程的方法實(shí)現對車(chē)輛信息的模糊處理控制。用鍵盤(pán)來(lái)對應急情況進(jìn)行處理,實(shí)現了人及對話(huà)功能。
實(shí)踐表明,采用這種方法設計的控制系統可進(jìn)一步提高路網(wǎng)的通行能力,減少路口延誤時(shí)間和停車(chē)次數,對高度非線(xiàn)性的、隨機的十字路口車(chē)流量的控制更加精確,并取得了很好的的經(jīng)濟效益,模糊控制交通器以其獨具的優(yōu)點(diǎn)在十字交通路口控制領(lǐng)域得到了很好的應用。本文包括如下主要內容:
1.本文首先概述了城市道路控制系統的國內外城市主流交通控制系統的結構及各自的優(yōu)缺點(diǎn)并分析了交通控制方法的基本類(lèi)型進(jìn);比較各種交通控制方法的優(yōu)缺點(diǎn):然后,介紹了可與交通控制中心構成完整的分級控制的城市道路交通控制體系的智能交通控制系統:
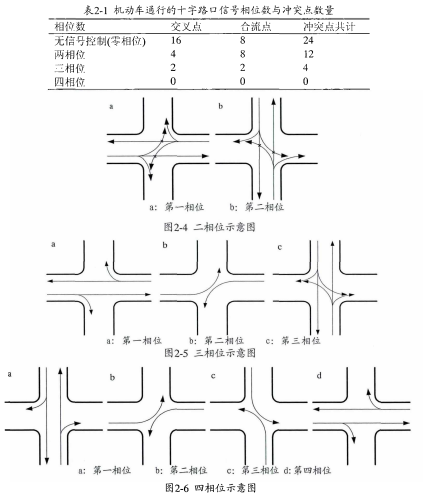
2.明確交叉路口通行行為控制的目的就是消除交通沖突。平面交叉路口的交通問(wèn)題本質(zhì)就是解決交叉路口交通沖突,如何減少和消除這種交通沖突是解決該問(wèn)題的關(guān)鍵。基于以上分析,結合可以有效解決時(shí)分沖突的信號控制技術(shù),進(jìn)行了平面交叉路口的交通沖突點(diǎn)分析,進(jìn)而得到信號控制的基礎和前提。
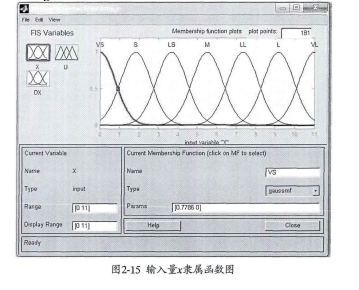
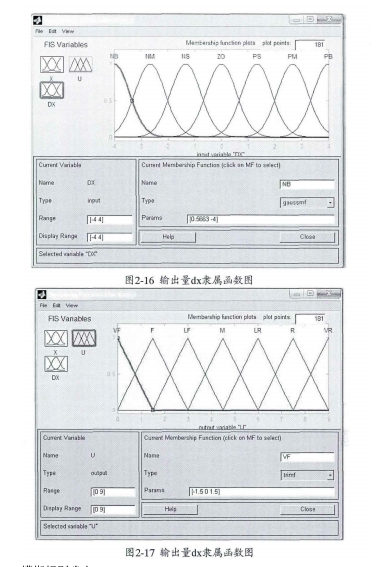
3.完成了模糊控制器設計。模糊控制器的輸入是綠燈方向待通過(guò)交叉口的車(chē)輛數量X和交叉方向車(chē)輛數量之差OX,輸出是綠燈延時(shí)△T,模棚控制器將模糊控制規則表離線(xiàn)轉化為查治表,存儲在計算機中供在線(xiàn)控制時(shí)使用,此控制器為單變量二維模糊控制器。
4、完成了智能交通系統交通控制系統硬件、軟件設計。系統的硬件電路包括單片機控制系統和外圍電路。為達到對紅綠燈時(shí)間的控制,要對道路車(chē)流量進(jìn)行檢測。車(chē)流量檢測設備就是一種自感應車(chē)輛傳感器。系統軟件根據車(chē)流量的動(dòng)態(tài)變化運用模糊控制算法實(shí)現紅綠燈時(shí)間的自動(dòng)調整,同時(shí)也有語(yǔ)言提示及報警的配合,全部軟件設計包括主程序和模棚判斷子程序,T0中斷子程序等。
5.進(jìn)行了平面交叉路口交通測試數據的評估。針對傳統的定時(shí)控制和模棚控制兩種方法。通過(guò)仿真和實(shí)測數據在路口應用具體問(wèn)題中進(jìn)行比較。進(jìn)而驗證了本文所提出的交通控制策略的實(shí)用性和有效性。
5.2展望
本文且在交叉路口交通燈實(shí)時(shí)模棚控制系統設計與實(shí)現方面做了-定的工作,為了能取得更好的效果研究還需進(jìn)一步 地提高,還可在如下方面加以改善。
1、考慮車(chē)輛等待長(cháng)度的模糊交通控制方法源于實(shí)際應用,提供了一種控制模式,然而,模糊控制規則的獲取主要依賴(lài)于長(cháng)期的交通管理實(shí)踐和交通規則,有較大的主觀(guān)性:同時(shí),控制系統僅對各相位的綠時(shí)序進(jìn)行自適應分配,井未對其它顏色時(shí)序進(jìn)行設計。如何對所有顏色交通相位進(jìn)行相序優(yōu)化,同時(shí)增加模糊控制的自學(xué)習能力,對提高控制算法對交通流的適應性和智能化程度具有重要意義。
2.本設計的控制器只針對城市單交叉路口的控制。而在城市十字路口相對集中的路段,模糊控制交通器只能各司其職,不能協(xié)調控制城市交通。完善的方向。以本設計的模糊控制交通器為基礎,用上位機來(lái)指揮各路口的控制器,使整個(gè)城市交通構成--個(gè)網(wǎng)絡(luò )系統。本設計的模糊控制交通器的模糊子集隸屬度函數是預先根據交通警察的經(jīng)驗確定,其控制效果很理想,相對于目前我國大多數交通路口所使用的定時(shí)控制具有相當大的優(yōu)勢。本設計還可以進(jìn)一步擴展, 使其作為下位機,通過(guò)軟件編程實(shí)現與上位機的通信,使上位機能夠綜合附近的十字路口信息,以實(shí)現對整個(gè)交通系統的優(yōu)化控制。
3、在實(shí)際應用中,檢測器的輸出對實(shí)時(shí)模糊控制系統模式具有重要作用。
然而,在實(shí)際交通系統的運行過(guò)程中,檢測器的故障難以避免,研究檢剽器故障下的容錯控制在下-步的研究中非常重要。交通控制系統的容錯性應建立在控制機可以根據自身的統計而生成檢測參數缺省值基礎上,這樣可以降低交通控制系統對檢測輸入的依賴(lài)程度,即使檢測器產(chǎn)生故障,控制機在也可保證較高的正常工作率。
參考文獻
[1] 黃衛,陳里得,智能運輸系統(TS)概論[M].北京人民交通出版杜2001
[2]柴磊,基于感應式車(chē)輛檢測技術(shù)的交通自適應控制研究[D].浙江大學(xué)。2006.
[3] J.Wootoo, A G Ortiz, s M Amin. Inglligent transporation system: a globalmarket presperctive[J]. Marthmatical Comput. Moelling1995,22.295-268
[4]劉智勇,梁渭清。城市交通信號控制的進(jìn)展[].公路交通科技2003,20(6)121-125
[5]金穩多相位智能交通控制器的研究[D].浙江大學(xué),2007.
[6]杜娟,智能交通系統中交叉口的模糊控制及算法[D],遼寧工學(xué)院2007.
[7]盧喜光。發(fā)達國家的ITS發(fā)展P].高科技與產(chǎn)業(yè)化,2008.6 -s5.
[8]史其信,陸化普。中國ITS發(fā)展戰略構想[1].公路交通科技1999,2:13-16.
[9] Chang Tang Hsien, Lin Jen Ting. Optimal Signal Timing for an OversaturatedIntersection, Transportation Research Part B: Methodological. 200.346):471-491.
[10]Ahmad, Azrulnor. Development of taffe light conirol system usingprogrammable logic contolle(DI, Malaysis Pahang University2007.
[1]illotson H T. The automatic control of urban road trffc[J]. Physics inTechnology. 1984,1503):136-142.
[12]史忠科。交通控制系統導論[M]北京:科學(xué)出版社。2003.
[13]劉智勇。瞿能交通控制理論及其應用[M].北京:科學(xué)出版社,2003.
[14]雷常青。交通控制與誘導遞階協(xié)調方法的研究[D]天津天津大學(xué)2004.
[15]趙建玉,智能計算方法在城市交通中的應用與交通流建模研究[D].山東山東大學(xué),2006. .
[16]趙杰胡子樣,劉麗亞。國外發(fā)展快速公交的經(jīng)驗及對我國城市交通發(fā)展的啟示[.城市交通2004,23):56-59.
[17]高雨,多相位智能交通控制器研究[D].浙江大學(xué),2006.
[18]溫惠英,尹宏斌,徐建閩。 -種信號交叉口模糊交通控制方法[].華南理工大學(xué)學(xué)報(自然科學(xué)版)200,12(29)-24-27.
[19]趙凱城市智能交通信號控制系統[D].西北工業(yè)大學(xué)2001.
[20]李紅梅。基于MATLAB的短時(shí)交通流預測分析及實(shí)現[D].山東科技大學(xué),2007.
[21]楊亮升。城市智能公共交通系統理論與方法[M].北京:中國鐵道出版社,2002.
[22]徐冬玲,方建安。邵世煌。交通系統的模糊控制及其神經(jīng)網(wǎng)絡(luò )實(shí)現[P]信息與控制,1992,21 (2);74-79.
[23]沈國江,王智,劉翔等。城市區域交通智能控制研究[)。信息與控制,2004.33()2-5.
[24]陳洪,陳森發(fā)單路口交通 實(shí)時(shí)模糊控制的-種方法[用。信息與控制1997.26(3): 227-233.
[25]趙晨,胡福喬,施鵬飛,基于模糊邏輯的路口交通信號控制[0],計算機工程。2003,29010)-50-52 .
[26]米宗華,張偉,趙霖。利用遺傳算法實(shí)現交通控制系統優(yōu)化方法[I].計算機工程2003.29(12);53-54.
[27]宮曉燕,陳德望,劉小明。基于有序樣本聚類(lèi)的交叉口交通信號控制算法研究].公路交通科技。203.20(1):101-1040.
[28]蔣忠遠,宋文,楊博。基于Pretri網(wǎng)的交通信號控制系統[D.系統仿真學(xué)報。2007,198)221-226.
[29]龍建成,高自友,任華玲。城市網(wǎng)絡(luò )交通動(dòng)態(tài)信號控制方法([].中國公路學(xué)報,2009,22(4):108-114.
[30]馬刀經(jīng)。李曉月,楊曉光。基于路徑的信號控制交叉口關(guān)聯(lián)計算模型0]統計大學(xué)學(xué)報(自然科學(xué))2090311);1462-1466.
[31]馬瑩瑩,楊曉光,曾港。信號控制交叉口周期時(shí)長(cháng)多目標優(yōu)化模型及求解[J].
同濟大學(xué)學(xué)報(自然科學(xué))2009.37(6):761-765.
[32]吳明暉,黃輝先,譚志輝等,- 種交叉路口信號優(yōu)化控制模型的研究與仿真],系統仿真學(xué)報2006.18(7): 1866-1869.
[33]曾光奇,胡均安。模糊控制理論與工程應用[M].武漢:華中科技大學(xué)出版社2006.
[34)Pappis P, Mandani H. A fuzzy logic controller for a tafflc junction[]. IEEETransactions on System, Man and Cybernetics.1997.7(10)-707-717.
[35]Nakatsuyama M, NagahashiH, Nishizuka N. Fuzzy logic phase controller fortrffe juncions in the one way arterial rouad 凹In Poceding of IFAC 9thTriennial Wold Cong, Budapest, Hungary,1984: 865-2870.
[36]Skowronski w, Shaw L Self-leaming fuzzy tnffic contollr for a taffiejunction[J]. European Congres on Ielligeant Techniques and Soft Compuing EUFIT 93, Aachen, Germany,1993:751-761.
[37]Porche 1. Lafortune s. Adaptive Look-ahead Optimization of Tarfle Signalsp小ITS Journal, 4(3):209 -254.
[38]Chou C H, Teng J C. A Fuzzy Logic Controller for Tafc Junction Signals[J].
Proceedings of the 6th Joint Conference on Information Sciences,2002,859- 870[39]Y Suzi Murat, Ergun Gedizlioglu, A fuzzy logic muli-phased signal ontrolmodel for isolated junctions[J]. Transportation Research Part C,2005,3:19- -36.
[40]陳淑燕,陳森發(fā),吳明贊,單路口交通的多相位實(shí)時(shí)模糊控制[I,系統工程理論與實(shí)踐203,1:110-115. .
[41]丁僉婷,吳國忠,基于PLC的交通十字路口模糊控制[0].儀器儀表學(xué)報。2006,27(6):1927-1930.
[42]楊曉光。中國城市道路交通實(shí)時(shí)自適應控制與管理系統研究[1]交通運輸工程學(xué)報2001,12:74- 77.
[43]馬楠,邵春福,趙熠,基于雙向綠波帶寬最大化的交叉口信號協(xié)調控制優(yōu)化[U]吉林大學(xué)學(xué)報(工學(xué)版)2009.39):19-24. .
[44]石建軍。交通行為控制原理[M].北京:人民交通出版i 20090.
[45]中華人民共和國交通部、中華人民共和國道路交通安全法。204.
[46]Tyack F GStreet taffic signals, with particular reference to vehicle actuaionIRlectrical Enginerers.2010.8211);125~154.
[47]謝季堅,劉承平。模糊數學(xué)方法及其應用(第三版)[M].武漢:華中科技大學(xué)出版社,2006.
[48]杜成濤,王水清。基于單片機的智能交通流量檢測器設計與實(shí)現[1.微處理機,2003, 2)。44-47
[49]張海英,余臻,陳燕萍。模糊控制在智能交通燈監控系統中的應用[P]計算機技術(shù)與發(fā)展, 2008,18(3); 181~183.
[50]徐欣,徐立鴻。城市交通兩緩加權神經(jīng)網(wǎng)絡(luò )控制系統設計與實(shí)現[]-微計算機信息2009,25(13): 293 -295
[51]馮冬青,謝宋和。模糊智能控制[M].北京:化學(xué)工業(yè)出版社, 2000
[52]Yu C, Lawrence w. Adaptive tnffic signal control with itrative genetie fuzzylogic crntolle[J. Procedings of the 2004 IEEE Intermational Coference onNetworking, Sending and Control, Taiwan, 2004:287-292.
[53]GaoJ X, LiJ G Zhao X H. Two stage fuzzy control of urtban isolatld intersectionsignal for complex tafft conditios[J], Procedings of the 5th World Congress on Inelligeant Control and Automation, Hangzhou, China2004-5287- 5291.
[54]劉酈莎,黃郡先,湯紅忠單交又o模糊交通控制器的研究國電機與控制學(xué)報2003,7(2)166-169.
[55]Hong K. A Novel Taffice Signal Control Frmulatio[小]. Transportationo Research,Part A: Policy and Practic, 199.33(6);443- 448.
[56]王青。交通信號機率沖突保護的實(shí)現[)].西北工業(yè)大學(xué)學(xué)扣200208):54~57.-
[57]王金梅,王兆安,楊金國。信號交叉口碰撞沖突分析及風(fēng)險評估模型研究[印]-西安交通大學(xué)學(xué)報,2005,39(12):1396-1400.
[58]Lin Shiowmin, Ghaman R. A Distributed Optimum Signal Scheme for DynamicTraffice ContoIU[]I. The 11th Interational Conference on Roud TransportInformation and Control .2002:120-124
[59]0u0J X L J 9 Multiphase fuzzy control under hybrid taffice flow of singleintersection[]. Proeeding of the IEEE 6th Intermational Conference on IntelligentTransportation System, Shanghai, 2003:1329- -1333.
[60]Pedrycz W.Fuzzy Control and Fuzzy Systerms(Scond extended edition)[M].New" York:Wiley Publish, 1993:34-45.
[61]Kim Y, Lee Kwang H. High Speed Flexible Fuzzy Hardware for Fuzzyinformation processing[J]J IEEE Trans on System, Man and Cybermetics,1997,27(2):45-56.
[62]Colomi A, Dorigo M, Maniezzo V Distributed optimization by ant colonics[].Proceeding of the First European Conference on Aticial Life. Paris,France:Elsevier Publish, 1991 :134-142.
[63]Guo jiang Shen, Ting fang Ma, You xian Sun. Application of fuzzy controltheoryin muli-phase taff control of single ntersecin[J]. Proceeding of the 4hWorld Congress on Itelligent Control and Automaion, 2002 (2):1017-1022
[64]Dorigo M, Maniezzo V. Colorni A.The Ant System: Opimizaion by a colony ofcoperating agents[]I. IEEB Transaction on Systems, man and Cybernetics: PartB,1996, 26(3):1-13.
[65]Dorigo M, Gambardella L M. An ant system: a cooperative learning approach tothetraveling salsman problem[]. IEEE Transaction on Evoltionary Computation,1997,1(1)53-66.
[66]劉曙光,魏俊民,竺志超,模糊控制技術(shù)[M].北京:中國紡織出版禮。2001.
致謝
逝者如斯,美好的求學(xué)之旅將會(huì )隨著(zhù)我的論文(設計)的撰寫(xiě)、答辯的順利完成而最終結束。在學(xué)習和論文的撰寫(xiě)過(guò)程中我常常感到來(lái)自:工作和學(xué)習的雙重的壓力,但我一直很冷靜沉著(zhù)地對待這兩方面的事情,我深知工作后學(xué)習機會(huì )的來(lái)之不易。白天登登岳麓山。晚上看看湘江,我總感覺(jué)自己要努力去實(shí)現自己的人生價(jià)值,松懈的時(shí)候也能常常感受到來(lái)自師長(cháng)、網(wǎng)窗。朋友、對我的默默支持和認可。
"紙上得來(lái)終覺(jué)淺,絕知此事要躬行".我不敢怠慢文章中的每-一個(gè)細節, 我力求在我的能力范田內做得盡可能完美。文章接近尾聲,我哀心地感謝學(xué)校,師長(cháng)、父母、同窗、朋友對我的關(guān)心與支持,特別是感謝導師陽(yáng)春華教授對我的悉心指導,陽(yáng)老師為人很和藹,知識湖博,對學(xué)生的指導很仔細,善于啟迪學(xué)生。
我還得感謝給了我無(wú)私幫助的朱紅求博士、柴琴琴博士、張斌博士,他們給了我很多幫助。再次衷心感謝我所有的朋友。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)