24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
頸椎是人體十分重要的運動(dòng)部分,但由于其活動(dòng)的頻率高和范圍廣,頸椎也是最容易疲勞甚至患病的部位。目前,頸椎病成為了臨床常見(jiàn)病,其發(fā)病性質(zhì)為退行性病變,它的主要表現為頭和頸肩部位疼痛以及手和手臂部位麻木,嚴重者甚至會(huì )導致癱瘓,因此,設計按摩機械手通過(guò)放松頸肩部肌肉對頸椎病進(jìn)行預防十分重要。
目前在按摩器械技術(shù)方面的研究已經(jīng)取得較大的進(jìn)展和突破,并且市場(chǎng)上已經(jīng)出現不同類(lèi)別的針對頸椎問(wèn)題的按摩器械,但現有的系統和研究仍然存在著(zhù)問(wèn)題:小型的按摩儀器方便攜帶但按摩手法單一,導致其最終的按摩效果較差;較大型的按摩機器人不方便攜帶,導致使用局限性較大;并且在研究時(shí)對于按摩效果的評估更多的是來(lái)自使用者自己的主觀(guān)感受,缺少科學(xué)的生理指標來(lái)對按摩效果進(jìn)行評估和表征。基于以上考慮,本文設計開(kāi)發(fā)了能完成四種按摩手法的便攜式頸肩康復按摩機械手,并進(jìn)行了相關(guān)的試驗研究來(lái)評估按摩效果。
本文首先對國內外按摩機器人的研究現狀進(jìn)行調研,并對按摩機器人目前在研究方面存在的主要問(wèn)題進(jìn)行總結和分析,結合目前中醫按摩手法的研究進(jìn)展,針對人體頸肩部位設計了一種頸肩康復按摩機械手,通過(guò)一系列的設計、仿真、加工、裝配、校準等工作,最終完成整個(gè)機械手的開(kāi)發(fā)過(guò)程。
本文根據頸肩康復按摩機械手的按摩功能需求進(jìn)行理論分析,確定了機械手機械結構仿生設計方案,根據中國成年人標準人體尺寸 GB 10000-88 進(jìn)行參數的確定和相應參數計算,在 MATLAB 的 Robotics Toolbox 工具箱中完成運動(dòng)學(xué)仿真模型的創(chuàng )建,并對手指末端運動(dòng)軌跡進(jìn)行仿真,之后在 CATIA 中完成三維模型的創(chuàng )建,并最終完成了頸肩康復按摩機械手的整機仿生設計。
為了在物理樣機加工之前驗證其合理性,在 ANSYS Workbench 中對整機和關(guān)鍵結構進(jìn)行了動(dòng)靜態(tài)力學(xué)仿真分析,并且通過(guò)靜力學(xué)仿真分析的方法探究了按摩頭軟硬變化對施力效果的影響;在 ADAMS 中使用 STEP 函數對整機的運動(dòng)學(xué)進(jìn)行仿真分析,重點(diǎn)研究和分析手指和手掌的末端按摩頭的運動(dòng)軌跡,為整機加工裝配提供基礎。
基于 LabVIEW 編程語(yǔ)言為物理樣機編寫(xiě)了電機控制程序,使用智能網(wǎng)關(guān)USBC9100 完成上、下位機的硬件連接,通過(guò) CAN 與 USB 之間的轉換實(shí)現上位機(電腦)和下位機(電機驅動(dòng)器)之間的通信,根據應用需求編寫(xiě)了四種按摩模式自動(dòng)切換的電機控制程序代碼,并進(jìn)行了大量的調試和驗證,保證在后期試驗和應用過(guò)程中能夠滿(mǎn)足要求。
最后對頸肩康復按摩機械手進(jìn)行了性能測試,使用仿人體皮膚硅膠塊代替人體進(jìn)行壓力試驗,測試壓力的傳感器選擇基于 Arduino 平臺的 Flexiforce 薄膜壓力傳感器進(jìn)行實(shí)時(shí)壓力測量,通過(guò)大量的重復性試驗驗證按摩機械手輸出性能的穩定性。最后對按摩效果進(jìn)行試驗驗證,確定按摩部位為斜方肌上束及其上方皮膚區域,并進(jìn)行多組按摩試驗,采用紅外熱像儀對受試者斜方肌上束及其上方皮膚區域進(jìn)行了多組按摩試驗,獲取了受試者按摩前后皮膚表面溫度的變化特征,綜合評估了按摩機械手的按摩效果。
關(guān)鍵詞:康復按摩,仿生設計,仿真,電機控制,性能測試

Abstract
Cervical spine is a very important part of human movement, but because of its high frequency and wide range of activities, cervical spine is also the most vulnerable part of fatigue and even disease. At present, cervical spondylosis has become a common clinical disease, and its pathogenesis is degenerative disease. Its main manifestations are pain in head, neck and shoulder, numbness in hand and arm, and even paralysis in severe cases. Therefore, it is very important to design massage manipulator to prevent cervical spondylosis by relaxing neck and shoulder muscles.
At present, the research on massage equipment technology has made great progress and breakthrough, and different types of massage instruments for cervical problems have appeared in the market, but there are still problems in the existing system and research: small massage instruments are easy to carry, but the massage hand method is single, resulting in poor massage effect; larger massage robot is not convenient to carry And in the study, the evaluation of massage effect is more from the user's own subjective feelings, lack of scientific physiological indicators to evaluate and characterize the massage effect. Based on the above considerations, this paper designs and develops a portable neck shoulder rehabilitation massage manipulator which can complete four kinds of massage techniques, and carries out relevant experimental research to evaluate the massage effect.
In this paper, firstly, the research status of massage robot at home and abroad is investigated, and the main problems existing in the research of massage robot are summarized and analyzed. Combined with the research progress of massage techniques in traditional Chinese medicine, a neck shoulder rehabilitation massage manipulator is designed for the neck and shoulder of human body Finally, the whole development process of manipulator is completed.
According to the massage function demand of neck shoulder rehabilitation massage manipulator, the bionic design scheme of mechanical mobile phone is determined. According to the Chinese adult standard body size GB 10000-88, the parameters are determined and the corresponding parameters are calculated The kinematics simulation model is created in the toolbox, and the motion trajectory of the end of the finger is simulated. Then the three-dimensional model is created in CATIA. Finally, the bionic design of the neck shoulder rehabilitation massage manipulator is completed.
In order to verify the rationality of the physical prototype before processing, the dynamic and static mechanical simulation analysis of the whole machine and key structure is carried out in ANSYS Workbench, and the influence of the soft and hard changes of the massage head on the force application effect is explored through the method of static simulation analysis; step is used in ADAMS Function to simulate the kinematics of the whole machine, focusing on the research and analysis of the movement track of the end massage head of fingers and palms, which provides the basis for the processing and assembly of the whole machine.
Based on LabVIEW programming language, the motor control program is written for the physical prototype, and the hardware connection between the upper and lower computers is completed by using the intelligent gateway usbc9100, and can is connected with USB According to the application requirements, the motor control program code for automatic switching of four massage modes is compiled, and a large number of debugging and verification are carried out to ensure that the requirements can be met in the later test and application process.
Finally, the performance of the neck shoulder rehabilitation massage manipulator is tested, and the pressure test is carried out by using silicone block simulating human skin instead of human body. The flexforce membrane pressure sensor based on Arduino platform is selected for real-time pressure measurement. The stability of the output performance of the massage manipulator is verified through a large number of repetitive tests. Finally, the massage effect was verified by experiments. The massage position was determined as the superior trapezius muscle bundle and its upper skin area. Multiple groups of massage experiments were carried out on the upper trapezius muscle bundle and its upper skin area by infrared thermal imager. The change characteristics of skin surface temperature before and after massage were obtained, and the massage effect of massage manipulator was comprehensively evaluated .
Key words: rehabilitation massage, bionic design, simulation, motor control, performance test
目錄
第 1 章 緒論
1.1 研究背景及意義
人體頸椎作為連接顱骨和胸椎骨的橋梁,是人體的整個(gè)脊柱中活動(dòng)頻率最高的部分[1],也是人體十分重要的運動(dòng)部分,但由于其活動(dòng)的頻率高和范圍廣,頸椎成為最容易疲勞甚至患病的部位。
頸椎病是臨床常見(jiàn)病[2],通過(guò)調研相關(guān)資料得知,誘發(fā)頸椎病的病因往往與長(cháng)期保持不良姿勢具有密不可分的關(guān)聯(lián),在眾多的患病人群當中,那些長(cháng)期從事低頭工作的人占比最大[3-5].
近些年,頸椎病的患病人群正在年輕化,主要有兩方面原因:一是隨著(zhù)互聯(lián)網(wǎng)科技的發(fā)展,各類(lèi)電子產(chǎn)品使得較多的青少年甚至是中老年人逐步發(fā)展成為"低頭一族",這種長(cháng)時(shí)間低頭的方式造成頸椎局部活動(dòng)過(guò)少;另一方面生活節奏的加快導致青少年和中年人生活壓力的增大,進(jìn)而帶來(lái)身體上尤其是頸椎上的極大疲勞。
目前在頸椎病的發(fā)病群體中,患病率最高的是大學(xué)生和白領(lǐng),調查統計表明,國內部分高校約有 79%的在校大學(xué)生時(shí)常出現相關(guān)的頸椎病癥,部分地域的白領(lǐng)被診斷出頸椎病癥的比率雖然只有 34%,但其中出現頭頸部位疼痛或上肢麻木的癥狀則占 54%[6-8].因此我們不僅要警惕這些觸目驚心的數字,還要對頸椎病的發(fā)病隱患有一個(gè)理性的認知,頸椎病的發(fā)病性質(zhì)為退行性病變,它主要表現為頭和頸肩部位疼痛以及手和手臂部位麻木,嚴重者甚至會(huì )導致癱瘓[9].
由此可見(jiàn),預防頸椎病的發(fā)生迫在眉睫,針對患病率較高的人群如高校大學(xué)生和白領(lǐng)每日的主要生活狀態(tài)進(jìn)行詳細的調研得知,他們時(shí)常在一天中有長(cháng)達幾個(gè)小時(shí)甚至超過(guò)十個(gè)小時(shí)的連續低頭工作,這種較長(cháng)時(shí)間的屈頸導致頸部和肩部的肌肉及周?chē)浗M織愈發(fā)疲勞,長(cháng)此以往則加劇了頸肩部肌肉及韌帶的嚴重勞損和頸椎間盤(pán)的退行性病變[10].
緩解頸肩部位的肌肉緊張和疲勞是預防頸椎病發(fā)生的主要手段之一[11],而緩解肌肉緊張的有效方式則是中醫推拿按摩[12],即通過(guò)對人體指定部位進(jìn)行按摩和放松,這樣不僅能夠促進(jìn)血液循環(huán)及新陳代謝,同時(shí)還能夠有效減輕疲勞,緩解因不良的生活方式帶來(lái)的肌肉緊張。由此可見(jiàn),按摩對頸椎部位相關(guān)疾病的預防十分關(guān)鍵[13-16].
目前人們接觸到的按摩服務(wù)來(lái)源分為兩大類(lèi),第一類(lèi)是由現在醫院的經(jīng)驗豐富的按摩師來(lái)完成,第二類(lèi)則是通過(guò)各種按摩器械代替人手來(lái)完成按摩過(guò)程。據統計我國的職業(yè)按摩師不到十萬(wàn)人,遠遠達不到社會(huì )需求的數量;另一方面,人工按摩方式加大了時(shí)間成本,影響了人們的工作和學(xué)習效率,因此研發(fā)能夠進(jìn)行專(zhuān)業(yè)手法按摩的機器人是一個(gè)可行方案[17].
同時(shí),中共"十九大"和"十三五"的召開(kāi)更是為我國服務(wù)類(lèi)機器人(包括按摩機器人)相關(guān)產(chǎn)業(yè)的發(fā)展指明了方向,在國家政策驅動(dòng)的背景下,服務(wù)類(lèi)機器人(包括按摩機器人)的相關(guān)技術(shù)如雨后春筍般發(fā)展迅速,中醫按摩機器人領(lǐng)域的研究技術(shù)也逐漸趨于成熟[18],并且將十分有可能取代中醫按摩師,為人們提供便捷的按摩服務(wù)。
眾所周知,機械手臂是整個(gè)按摩機器人的重要執行部件,其運行很大程度上影響著(zhù)機器人的按摩效果[19,20].因此在進(jìn)行相關(guān)研究時(shí)重點(diǎn)考慮按摩機械手臂的設計,在實(shí)際應用的過(guò)程中,為了降低機器人使用的局限性和研發(fā)成本,完全可以單獨設計機械手臂對人體指定部位進(jìn)行按摩,因此本文針對放松頸肩部肌肉、預防頸椎病開(kāi)發(fā)頸肩康復按摩機械手,其研究意義重大并且具有較高的應用價(jià)值。
1.2 國內外研究現狀
1.2.1 國外按摩機器人研究現狀
日本、韓國和美國等國家在機器人制造的關(guān)鍵技術(shù)方面具有顯著(zhù)優(yōu)勢[21],同時(shí)對于按摩機器人的設計和制造也開(kāi)展了大量的工作。其中較早對按摩機器人領(lǐng)域相關(guān)技術(shù)展開(kāi)研究工作的國家是日本,隨后來(lái)自美國以及其它國家的學(xué)者也將研究工作涉足到按摩機器人領(lǐng)域[22].1962 年日本學(xué)者設計制造出第一臺按摩椅,此基礎上,1974 年又提出了一種通過(guò)離合器控制按摩球對人進(jìn)行按摩的方法(如圖 1.1 所示),在 1996 年,日本的 Masao Kume 等學(xué)者對按摩機器人的智能性進(jìn)行探究和驗證,最終設計了一種能夠完成"捏拿"按摩動(dòng)作的機械療法單元[23],如圖 1.2 所示。

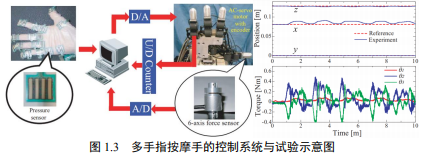
[24-29],它是通過(guò)基于力和位置的阻抗控制的方法分別對按摩機械手的按摩位置和按壓力進(jìn)行控制,并設計了相關(guān)的機械手控制試驗對控制策略進(jìn)行驗證,如圖1.3 所示。
2007 年,日本的學(xué)者針對按摩椅提出了基于皮膚彈力的控制方法[30],如圖1.4 所示。與此同時(shí),2007 年韓國的專(zhuān)家 Chul-goo Kang[31]仿照人的形態(tài)搭建了兩種捶背機器人的理論模型,且與人體的形態(tài)高度相似。

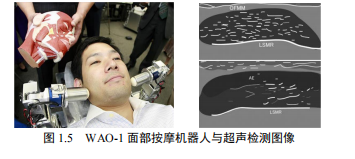
2009 年,日本學(xué)者開(kāi)發(fā)了六自由度機器人 WAO-1[32-41],如圖 1.5 所示,它主要通過(guò)對人體面部的肌肉進(jìn)行按摩和放松,加快面部相關(guān)疾病的康復。該按摩機器人首先對面部信息進(jìn)行采集和分析,根據分析結果生成治療方案并開(kāi)始按摩,最后對按摩效果進(jìn)行評估,通過(guò)咬肌的超聲特征判斷按摩治療的功效。研究表明:按摩治療后咬肌厚度和單側組癥狀側的厚度明顯減少,該按摩治療具有較為明顯的效果。
2010 年,WheeMe 系列由 DreamBots 公司開(kāi)發(fā)并推廣,如圖 1.6 所示,該系列按摩機器人的主要按摩部位為腹部和背部肌肉群[42].2014 年,Golovin[43]為了證明按摩機械人力量訓練具有實(shí)際意義,設計了大量的臨床試驗,最終成功驗證了自己的設想,如圖 1.7 所示。

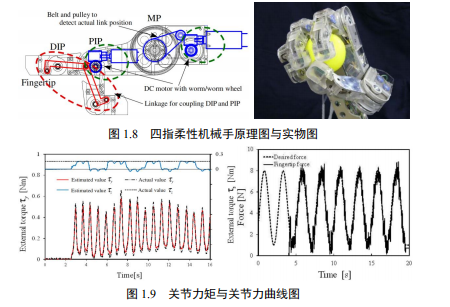
2012 年,日本的學(xué)者 Kajikawa S[44]基于柔性理念設計了一款機械手,如圖1.8 所示。它由四個(gè)手指組成,每個(gè)手指有三個(gè)關(guān)節,關(guān)節剛度可以調節,并對按摩力和力矩進(jìn)行測量和比較,如圖 1.9 所示,并最終證明可以有效應用于人體按摩。
1.2.2 國內按摩機器人研究現狀
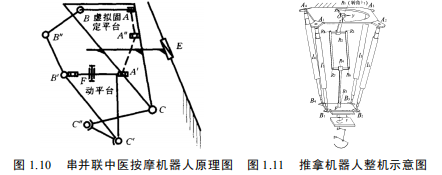
自 2004 年以來(lái),國內的馬履中等學(xué)者開(kāi)展了按摩機器人理論構型的研究,首先提出的是基于中醫理論的串并聯(lián)按摩機器人理論模型,它共有三個(gè)自由度,如圖 1.10 所示[45-48];在此基礎上,又提出了五自由度的按摩機器人的構型,示意圖如圖 1.11 所示,該機構能夠更好地模擬中醫按摩的多種手法,這些機構的設計理念對后續的相關(guān)研究工作具有十分深遠的影響。
2010 年,中國臺灣的 Luo,R.C 等人開(kāi)發(fā)了一種多指機器人按摩手,分析了按摩治療前后斜方肌的表面肌電信號[49],根據 EMG 信號的判別值來(lái)區分痛苦和舒適的感覺(jué),基于人的感覺(jué)和按摩力之間的關(guān)系,獲得了機器人指令的適當范圍,對機器人手的控制具有指導意義,如圖 1.12 所示。

同樣在 2010 年,哈爾濱工程大學(xué)胡磊等人提出了一個(gè)基于疼痛閾值和混合力位置控制策略的手指揉捏操作模型,他們使用視覺(jué)伺服跟蹤按摩位置[50,51],最后為了對按摩療效進(jìn)行評估,采用軟組織張力測試儀對肌肉軟組織彈性模量進(jìn)行檢測,如圖 1.13 所示為測試過(guò)程,使用按摩前后肌肉的彈性模量的變化量對按 摩效果的好壞進(jìn)行表征。江蘇大學(xué)的尹曉琴和徐永根提出了一種實(shí)現 1 次平移-1旋轉的 2-DOF 并聯(lián)機制以單開(kāi)鏈為單位[52].王晶晶提出了 7-DOF(自由度)冗余機械手的新應用,用于為人腳做按摩工作,并在末端執行器上配備觸覺(jué)傳感器[53].

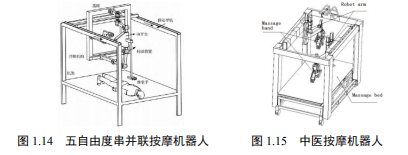
2014 年,中國學(xué)者曾達幸首先展開(kāi)關(guān)于中醫按摩的理論分析,并開(kāi)發(fā)了一種串并聯(lián)按摩機器人[54],它共有五個(gè)自由度,如圖 1.14 所示。東南大學(xué)研究人員設計了一種機械手,可以完成對人體的按摩功能。如圖 1.15 所示,山東建筑大學(xué)的魯守銀[55-57]教授介紹了理療服務(wù)機器人原型的設計過(guò)程,該按摩機器人最 多可以完成十種典型的中醫按摩手法。
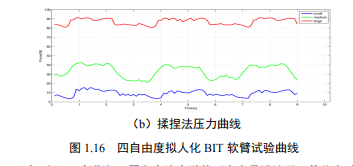
同樣在 2014 年,中國學(xué)者黃元燦[58]開(kāi)發(fā)了具有集成彈性關(guān)節的四自由度擬人化 BIT 軟臂,然后通過(guò)專(zhuān)用的測量設備在體內獲取專(zhuān)家在按摩療法過(guò)程中指尖力的曲線(xiàn),采用按壓和揉捏等按摩方法,按摩手分別作用在假體模型和人體皮膚上,按摩過(guò)程如圖 1.16(a)所示,最終得到相應的壓力曲線(xiàn),如圖 1.16(b)所示,試驗結果表明,設計開(kāi)發(fā)的機械臂可以有效地完成按摩操作。

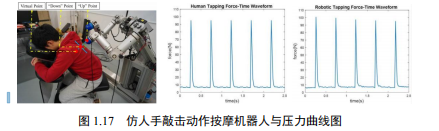
2014 年至 2018 年期間,國立臺灣大學(xué)的研究人員設計了一款仿人手敲擊動(dòng)作的按摩機器人,利用在線(xiàn)軌跡發(fā)生器(OTG)在每次敲擊期間控制頻率,并對按摩前后人心率等指標進(jìn)行觀(guān)測。結果表明,這種按摩敲擊動(dòng)作,與按摩師敲擊動(dòng)作相關(guān)系數可以被視為高度正相關(guān)(超過(guò) 0.90),并且按摩效果較為明顯,如圖 1.17[59-64].
中的核心思想值得借鑒,不足之處也值得總結[65].可以看出,雖然部分按摩機器人的智能化程度更高,但是普遍存在整體結構尺寸較大,不具有便捷性,大多數的使用形態(tài)為按摩床一類(lèi),其占據空間大,不方便攜帶的劣勢影響使用體驗[66].為此,在對本課題的相關(guān)研究領(lǐng)域進(jìn)行總結分析后,本文對目前市場(chǎng)主要常見(jiàn)的較便攜的按摩器械進(jìn)行了進(jìn)一步調研。
1.2.3 市場(chǎng)主要的便攜式按摩器的調研
市場(chǎng)上的主要按摩儀器主要可分為四類(lèi),分別是按摩椅類(lèi)、按摩枕類(lèi)、披肩類(lèi)和敲打錘類(lèi)。按照按摩部位進(jìn)行劃分,可分為全身按摩椅和局部按摩椅,如圖1.18 所示,全身按摩椅在頸部安裝四個(gè)加熱按摩頭,可根據需要上下,前后進(jìn)行調節,在頸部上、中、下三檔調節,在背部加裝加熱按摩頭,可進(jìn)行正反轉揉捏推拿,在腰部突出地方和坐墊處均布置振動(dòng)按摩頭,進(jìn)而可對全身各個(gè)部位進(jìn)行按摩;海斯特公司研發(fā)了足浴和足底按摩一體化的新型按摩椅,如圖 1.19 所示。

由于本文主要針對頸椎部位按摩器械進(jìn)行研究,所以重點(diǎn)對市場(chǎng)上主要的便攜式頸椎按摩儀器進(jìn)行調研,如圖 1.20 所示的按摩器屬于按摩枕類(lèi)中的頸椎矯正按摩器,通過(guò)內部雙氣囊的布置實(shí)現頸椎的牽引,附加低頻脈沖和熱敷溫灸實(shí)現多種模式相互切換;圣卡琳頸椎按摩枕(如圖 1.21)內置六個(gè)按摩頭,按摩較多穴位,更設計正轉推拿反轉叩擊,有兩種按摩方式,還有兩個(gè)紅外理療燈,增強按摩療效。

如圖 1.22 和圖 1.23 所示,頸椎按摩披肩內置電機、齒輪、凸輪等結構,主要通過(guò)錘擊和揉捏等方式緩解頸部肌肉疲勞,附加溫感熱敷的功能,增強按摩效果。

凱仕樂(lè )按摩錘可按摩身體各個(gè)部位,輕質(zhì)且便攜,具有加熱功能,使用者可自身根據需要調節參數,按摩效果較好;五段式力度調節能有效地刺激神經(jīng)和肌肉,達到舒適和松弛的按摩效果,如圖 1.24 所示。電動(dòng)敲打錘模仿人的雙手按摩,主要方式為震動(dòng)和敲打,四個(gè)按摩頭使得受力更加均勻,舒適性更強,如圖1.25 所示。

1.2.4 存在的主要問(wèn)題
據上述對按摩機器人的國內外研究現狀的總結和市場(chǎng)上主要便攜式按摩儀器的調研可以看出,按摩機器人在研究層面目前已經(jīng)取得較大的進(jìn)展和突破,按摩儀器的市場(chǎng)也在逐步擴展,可是現有的系統和研究仍然存在著(zhù)問(wèn)題:
(1)按摩功能的多樣性和便攜性之間的協(xié)調。
現有的小型按摩儀器按摩功能單一,并且與中醫按摩推拿之間的融合性較差,因此對于頸部和肩部肌肉的放松效果一般;而較大型的按摩機器人雖然能夠按摩較多部位,按摩手法較多,效果較好,但是因其外形較大,主要形態(tài)為按摩床,需要使用者必須躺臥才能進(jìn)行按摩,不便于安裝在家中或者辦公室,使用局限性較大。 (2)針對按摩效果的評估。
目前對于按摩機器人的研究主要包括:智能化方面、機械結構優(yōu)化方面和個(gè)性化方面,忽略了對使用者本身的研究,尤其是對使用者在按摩前后的效果評估比較籠統,主要還是通過(guò)使用者自己主觀(guān)的感受來(lái)評價(jià)按摩器的好壞、按摩效果的優(yōu)良,此外機械手臂按摩頭的軟硬是影響按摩施力效果的一個(gè)重要因素[67],目前相關(guān)研究尚未引起足夠重視。
1.3 本文主要研究?jì)热?/strong>
本文在對按摩機器人領(lǐng)域的相關(guān)文獻查閱的基礎上,對市場(chǎng)上的按摩儀器進(jìn)行詳細的調研,最終開(kāi)展了關(guān)于頸肩肌肉康復按摩機械手的設計制造與性能試驗研究,主要內容如下:
第一章:介紹本課題的研究背景與意義,概述了國內外學(xué)者關(guān)于按摩機器人領(lǐng)域的研究進(jìn)展,并針對市場(chǎng)上主要的按摩儀器進(jìn)行了調研和分析,總結了按摩機器人或機械手在研究技術(shù)層面存在的問(wèn)題。
第二章:建立按摩手法特征坐標系,并對按摩功能需求進(jìn)行分析,確定按摩機器人機械結構方案,依據中國成年人標準人體尺寸 GB 10000-88 的標準來(lái)進(jìn)行尺寸參數的確定與計算,最后在 MATLAB 中針對按摩機械手手指部分的運動(dòng)進(jìn)行運動(dòng)學(xué)仿真分析,并對仿真結果進(jìn)行驗證,為下一步的建模工作提供數據。
第三章:應用 CATIA 創(chuàng )建頸肩康復按摩機械手的各零部件的三維模型,并完成頸肩康復按摩機械手的虛擬樣機裝配,使用 ANSYS Workbench 對關(guān)鍵部件進(jìn)行了靜力學(xué)有限元仿真分析及模態(tài)分析,并且通過(guò)在仿真軟件中更改按摩頭材料剛度參數來(lái)探究按摩頭不同材料對其施力效果的影響;在 ADAMS 中對機械手虛擬樣機模型進(jìn)行了運動(dòng)學(xué)仿真并導出相關(guān)參數曲線(xiàn),以此對按摩手能夠完成的四種按摩手法進(jìn)行了仿真模擬分析。
第四章:采用 3D 打印和機械加工對機械手部件進(jìn)行了加工和裝配,基于LabVIEW 編程語(yǔ)言為物理樣機設計了控制程序代碼,使用智能網(wǎng)關(guān) USBC9100完成上、下位機的硬件連接,通過(guò) CAN 與 USB 之間的轉換實(shí)現上位機(電腦)和下位機(電機驅動(dòng)器)之間的通信,根據應用需求編寫(xiě)了四種按摩模式自動(dòng)切換的電機控制程序代碼,并進(jìn)行了大量的調試和驗證;之后針對按摩部位為斜方肌上束及其上方皮膚區域,并進(jìn)行了多組按摩試驗,并應用紅外熱像儀對受試者被按摩部位在按摩前后皮膚表面溫度值進(jìn)行測量和對比,結果表明:使用本文設計的機械手在對人體頸肩部位肌肉斜方肌進(jìn)行按摩后,按摩部位皮膚表面溫度穩步升高,并能夠維持較長(cháng)時(shí)間,說(shuō)明機械手對按摩部位的作用使得其生熱效果較明顯而且較為持久,有助于促進(jìn)血液循環(huán)和疏通經(jīng)絡(luò ),進(jìn)而對于頸椎病的預防具有實(shí)際意義。
第五章:介紹論文的主要研究結論以及未來(lái)展望。
第 2 章 頸肩康復按摩機械手的仿生結構設計
2.1 引言
2.2 頸肩康復按摩機械手的按摩功能需求分析
2.3 頸肩康復按摩機械手的機械結構仿生設計
2.3.1 機械手設計基本要求
2.3.2 機械手傳動(dòng)方式的確定
2.3.3 機械手仿生結構方案的確定
2.3.4 機械手主要結構參數的確定
2.4 機械手的驅動(dòng)系統設計
2.4.1 機械手驅動(dòng)方式選擇
2.4.2 驅動(dòng)電機的選型
2.5 機械手的正向運動(dòng)學(xué)分析
2.5.1 正向運動(dòng)學(xué)分析的意義
2.5.2 機械手空間參考坐標系的建立
2.5.3 機械手正向運動(dòng)學(xué)方程建立
2.5.4 基于 Robotics Toolbox 工具箱的模型校驗
2.5.5 對象模型創(chuàng )建
2.5.6 運動(dòng)模型驗證
2.5.7 運動(dòng)軌跡仿真分析
2.6 本章小結
第 3 章 頸肩康復機械手的結構力學(xué)與運動(dòng)仿真分析
3.1 引言
3.2 頸肩康復按摩機械手的三維建模
3.2.1 CATIA 建模工具簡(jiǎn)介
3.2.2 機械手整體模型介紹
3.2.3 機械手指捏功能運動(dòng)組件
3.2.4 機械手掌摩功能運動(dòng)組件
3.2.5 機械手按、敲功能傳動(dòng)組件
3.2.6 機械手裝夾功能組件
3.2.7 機械手三維模型的裝配
3.3 基于 ANSYS 的機械手結構力學(xué)有限元仿真
3.3.1 ANSYS Workbench 有限元分析
3.3.2 機械手關(guān)節軸及其基座的靜力學(xué)分析
3.3.3 機械手手指部件的靜力學(xué)仿真
3.3.4 機械手手掌按摩頭的靜力學(xué)仿真及模態(tài)分析
3.3.5 材料剛度對接觸效果的仿真分析
3.4 基于 ADAMS 的頸肩康復按摩機械手運動(dòng)仿真分析
3.4.1 ADAMS 軟件介紹
3.4.2 仿真模型導入
3.4.3 構件材料特性定義
3.4.4 約束和驅動(dòng)施加
3.4.5 運動(dòng)軌跡仿真分析
3.5 本章小結
第 4 章 頸肩康復按摩機械手的物理樣機制造與性能測試
4.1 引言
4.2 3D 打印機性能參數簡(jiǎn)介
4.3 機械手物理樣機機械本體的制造
4.4 控制系統總體設計
4.4.1 控制系統基本設計要求
4.4.2 步進(jìn)電機驅動(dòng)系統方案確定
4.4.3 步進(jìn)電機驅動(dòng)系統硬件設計
4.4.4 系統硬件介紹
4.4.5 上位機控制方案設計
4.4.6 LabVIEW 軟件介紹
4.4.7 控制軟件整體設計
4.4.8 單個(gè)電機控制軟件設計
4.4.9 三個(gè)電機運動(dòng)控制軟件的設計
4.5 機械手的按摩性能評估
4.5.1 性能測試裝置的設計
4.5.2 壓力傳感器的介紹
4.5.3 壓力傳感器的使用和標定
4.5.4 按壓法輸出壓力曲線(xiàn)
4.6 按摩效果試驗測試與分析
4.6.1 按摩部位確定
4.6.2 基于紅外儀的皮膚表面溫度測試與分析
4.7 本章小結
第 5 章 總結與展望
5.1 總結
本文綜合分析了國內外按摩機器人、按摩機械手的研究進(jìn)展,對按摩機器人相關(guān)領(lǐng)域在研究方面存在的問(wèn)題進(jìn)行總結,結合目前中醫按摩手法的研究進(jìn)展,針對人體頸肩部位設計了一種便攜式的頸肩康復按摩機械手。通過(guò)一系列的機械仿生結構設計、力學(xué)仿真、零件加工、整機裝配、電機調試及傳感器校準等工作,采用仿人皮膚硅膠塊進(jìn)行性能評估測試,結果表明該機械手物理樣機具有較好的輸出穩定性。最后設計完成了按摩效果測試,通過(guò)紅外熱像儀測量皮膚表面溫度,驗證按摩機械手按摩的有效性。本文主要工作及結論具體如下:
(1)首先結合頸椎病的發(fā)病趨勢和人體按摩對于疾病防范的重要性,闡釋了頸肩康復按摩機械手研究的背景和意義,然后介紹國內外按摩機器人的發(fā)展現狀,并對市場(chǎng)上主要的頸椎按摩器械進(jìn)行調研,針對現有按摩器械存在的主要問(wèn)題進(jìn)行總結和分析,闡述研制頸肩康復按摩機械手對于預防頸椎病的發(fā)生具有重要意義。
(2)建立按摩手法運動(dòng)特征坐標系,選定指捏法、掌摩法、按壓法和敲擊法四種中醫按摩手法,確定了運動(dòng)機構的設計方案,根據中國成年人標準人體尺寸 GB 10000-88 進(jìn)行參數的確定和相應參數計算,在 MATLAB 中進(jìn)行運動(dòng)模型的仿真,并最終完成了頸肩康復按摩機械手的三維建模。
(3)為了在物理樣機加工之前驗證其合理性,對整機和關(guān)鍵結構進(jìn)行了動(dòng)靜態(tài)力學(xué)仿真分析,并且研究了按摩頭材料對于按壓效果的影響并進(jìn)行了靜力學(xué)仿真分析,在 Adams 中應用 STEP 函數對整機的運動(dòng)學(xué)進(jìn)行仿真分析,并研究手指和手掌按摩頭的運動(dòng)軌跡,為整機加工裝配提供基礎。
(4)整機設計方案確定后,對零部件進(jìn)行加工和采購,加工方式選擇機械加工和 3D 打印相結合的方式,在完成物理樣機的組裝后,對控制系統的硬件連接以及上位機 LabVIEW 軟件進(jìn)行詳細介紹,對 LabVIEW 軟件電機控制的程序代碼進(jìn)行介紹,并設計了四種按摩模式自動(dòng)切換的電機控制程序,并通過(guò)實(shí)際測試進(jìn)行驗證,在確保控制程序滿(mǎn)足應用需求后,對機械手進(jìn)行按摩性能測試。
(5)在進(jìn)行機械手按摩性能測試時(shí),考慮先試用仿人體硅膠塊代替人體進(jìn)行壓力試驗,測試壓力的傳感器選擇基于 Arduino 平臺的 Flexiforce 薄膜壓力傳感器進(jìn)行實(shí)時(shí)壓力測量,通過(guò)大量的重復性試驗驗證按摩機械手輸出性能的穩定性,結果表明機械手輸出性能良好,結構設計合理。最后針對按摩部位為斜方肌上束,進(jìn)行了多組按摩試驗,并結合紅外熱像儀對受試者按摩前后皮膚表面溫度進(jìn)行按摩試驗研究,結果表明:使用本文設計的機械手在對人體頸肩部位肌肉斜方肌進(jìn)行按摩后,按摩部位皮膚表面溫度穩步升高,并能夠維持較長(cháng)時(shí)間,說(shuō)明機械手對按摩部位的作用使得其生熱效果較明顯而且較為持久,有助于促進(jìn)血液循環(huán)和疏通經(jīng)絡(luò ),進(jìn)而對于頸椎病的預防具有實(shí)際意義。
5.2 展望
本課題完成了便攜式頸肩康復按摩機械手的仿生設計和物理樣機的加工制造,搭建了控制系統,并通過(guò)按摩效果試驗驗證樣機的有效性,但是距離實(shí)際應用和產(chǎn)品生產(chǎn)的階段還有很長(cháng)的一段路要走,后續的研究工作主要有:
(1)本文在 PC 端設計的 LabVIEW 程序界面作為上位機,在樣機測試過(guò)程中滿(mǎn)足需求但是在實(shí)際應用時(shí)較為復雜,后續可以選用更加智能便捷的控制方式。
(2)本文在物理樣機加工時(shí)選用機械加工和 3D 打印兩種加工方式,材料成本較大,整體重量較重,后續可以考慮降低成本和進(jìn)行輕量化設計。
參考文獻
[1] 梁棟。基于 CT 圖像的全頸椎三維有限元模型的建立及驗證[D].上海:中國醫科大學(xué),2011.
[2] 湯清。 頸椎牽引新設備的研究及全頸椎模型的建立與仿真[D].鄭州:鄭州大學(xué),2018.
[3] 王鈺。 肌內效貼布對緩解肩頸部肌肉緊張度的時(shí)效性研究[D].北京:北京體育大學(xué),2013.
[4] 顧根興。 復旦大學(xué)教職工頸椎病 102 例追蹤觀(guān)察[J]. 中國校醫(4):277-278.
[5] Irvine DH. Prevalence of cervical spondylosis in a general practice[J]. Lancet,1965,14:1089-1092.
[6] 裴仁和。青年人頸椎病病因及臨床特點(diǎn)探討[J].中國中醫骨傷科雜志,2002(04):58-60.
[7] 高春花 . 廣 西 在 校 大 學(xué) 生 頸 椎 病 癥 現 狀 調 查 分 析 [J]. 科 技 展 望 ,2014(18):208-209.
[8] 王越敏,劉申,朱毅,等。白領(lǐng)人群頸椎病患病情況的調查分析[J].按摩與康復醫學(xué)旬刊,2010,1(4):114-115.
[9] 柴粉霞,張衛華。張衛華教授應用尺脛針療法治療頸型頸椎病臨床經(jīng)驗[J].現代中醫藥,2017,37(02):1-2.
[10] 王冰,段義萍,張友常,等。頸椎病患病特征的流行病學(xué)研究[J].中南大學(xué)學(xué)報(醫學(xué)版),2004(04):472-474.
[11] 朱啟星,曹敬銀,吳國隆,等。長(cháng)期伏案工作的頸部肌肉骨骼損傷[J].中華勞動(dòng)衛生職業(yè)病雜志,1990(06):363-365.
[12] 趙維超。按摩機械手機構的設計與研究[D].安徽:安徽工業(yè)大學(xué),2018.
[13] 張志海,劉曉虹,秦渭志等。牽引配合推拿與牽引配合理療治療腰椎間盤(pán)突出癥療效對比研究[J].新中醫,2006,38(7): 69-70.
[14] 王敏,郭鐵峰。手法按摩對肩關(guān)節周?chē)滋弁醇肮δ芑謴偷淖饔肹J].中國臨床康復,2002,6(10):1498.
[15] 周春陽(yáng)。女子手球運動(dòng)損傷特點(diǎn)及鄭氏按摩手法的應用[J].四川體育科學(xué),2004(1):24-25.
[16] 馮金升。推拿療法的作用機理[J].推拿與引導。2001(17): 4-5.
[17] 韓躍營(yíng)。康復按摩機器人手臂控制系統研究[D].長(cháng)春:長(cháng)春工業(yè)大學(xué),2012.
[18] 張立超。仿人按摩機器人設計與研究[D].沈陽(yáng):沈陽(yáng)理工大學(xué),2014.
[19] 梁倩。中醫按摩機械手設計與研究[D].長(cháng)春:長(cháng)春工業(yè)大學(xué),2013.
[20] 王薇,方曉麗,宋志靖。頰針治療頸肩綜合征 45 例[J].甘肅中醫 2010,23 (02):53-54.
[21] 劉之峰。面向智能家居的服各機器人設計[D].柳州:廣西科技大學(xué),2015.
[22] 李健。安全中醫按摩機器人臂系統與控制策略研究[D].北京理工大學(xué),2015.12
[23] Kume M , Morita Y , Yamauchi Y , et al. Development of a mechanotherapy unitfor examining the possibility of an intelligent massage robot[C]// IEEE/RSJInternational Conference on Intelligent Robots & Systems. IEEE, 1996.
[24] Minyong P , Mouri K , Kitagawa H , et al. Hybrid impedance and force controlfor massage system by using humanoid multi-fingered robot hand[C]// Systems,Man and Cybernetics, 2007. ISIC. IEEE International Conference on. IEEE,2007.
[25] Terashima K , Kitagawa H , Miyoshi T , et al. Modeling and massage control ofhuman skin muscle by using multi-fingered robot hand[J]. IntegratedComputer-Aided Engineering, 2006, 13(3):233-248.
[26] Minyong P , Mouri K , Kitagawa H , et al. Hybrid impedance and force controlfor massage system by using humanoid multi-fingered robot hand[C]// Systems,Man and Cybernetics, 2007. ISIC. IEEE International Conference on. IEEE,2007.
[27] Terashima K , Kitagawa H , Miyoshi T , et al. Modeling and massage control ofhuman skin muscle by using multi-fingered robot hand[J]. IntegratedComputer-Aided Engineering, 2006, 13(3):233-248.
[28] Mouri K , Terashima K , Minyong P , et al. Hybrid impedance control of humanskin muscle by multi-fingered robot hand[C]// Intelligent Robots and Systems,2007. IROS 2007. IEEE/RSJ International Conference on. IEEE, 2007.
[29] Minyong, P.Expert massage motion control by multi-fingered robothand. IEEE/RSJ International Conference on Intelligent Robots andSystems IEEE, 2003:3035-3040 vol.3.
[30] Teramae T , Kushida D , Takemori F , et al. Control strategy for the massagechair based on human skin elasticity[M]. 2007.
[31] Kang C , Lee B , Son I , et al. Design of a Percussive Massage Robot TappingHuman Backs[C]// IEEE International Symposium on Robot & HumanInteractive Communication. IEEE, 2007.
[32] Koga H , Usuda Y , Matsuno M , et al. Development of Oral Rehabilitation Robot for Massage Therapy[C]// International Special Topic Conference onInformation Technology Applications in Biomedicine. IEEE, 2007.
[33] Ariji Y , Katsumata A , Hiraiwa Y , et al. Masseter muscle sonographic featuresas indices for evaluating efficacy of massage treatment[J]. Oral Surgery OralMedicine Oral Pathology Oral Radiology & Endodontology, 2010, 110(4):0-526.
[34] Ishii H , Koga H , Obokawa Y , et al. Path generator control system and virtualcompliance calculator for maxillofacial massage robots[J]. International Journalof Computer Assisted Radiology & Surgery, 2010, 5(1):77-84.
[35] Koga, H. Development of the Oral Rehabilitation Robot WAO-1. IEEE Ras &Embs International Conference on Biomedical Robotics andBiomechatronics IEEE, 2008:556-561.
[36] Ishii H , Koga H , Obokawa Y , et al. Development and Experimental Evaluationof Oral Rehabilitation Robot that Provides Maxillofacial Massage to Patientswith Oral Disorders[J]. International Journal of Robotics Research, 2009,28(9):1228-1239.
[37] Solis J , Obokawa Y , Ishii H , et al. Development of Oral Rehabilitation RobotWAO-1R designed to provide various massage techniques[C]// RehabilitationRobotics, 2009. ICORR 2009. IEEE International Conference on. IEEE, 2009.
[38] Ariji Y , Nakayama M , Nishiyama W , et al. Potential clinical application ofmasseter and temporal muscle massage treatment using an oral rehabilitationrobot in temporomandibular disorder patients with myofascial pain[J]. Cranio,2015, 33(4):256-262.
[39] Koga H , Usuda Y , Matsuno M , et al. Development of Oral RehabilitationRobot for Massage Therapy[C]// International Special Topic Conference onInformation Technology Applications in Biomedicine. IEEE, 2007.
[40] Obokawa Y , Solis J , Ishii H , et al. Clinical massage therapy with theoral-rehabilitation robot in patients with temporomandibular joint disorders[J].Information Technology & Applications in Biomedicine. itab. internationalConferenc, 2009:1 - 4.
[41] Ariji Y , Katsumata A , Ogi N , et al. An oral rehabilitation robot for massagingthe masseter and temporal muscles: a preliminary report[J]. oral radiology, 2009,25(1):53-59.
[42] 便攜按摩機器人(WHEEME):中國,201230549796[P].2013.03.13.
[43] Golovin V, Arkhipov M, Zhuravlev V. Force training for position/force control of massage robots[M]//New Trends in Medical and Service Robots. SpringerInternational Publishing, 2014: 95-107.
[44] Kajikawa S , Abe K . Robot Finger Module With Multidirectional AdjustableJoint Stiffness[J]. IEEE/ASME Transactions on Mechatronics, 2012,17(1):128-135.
[45] 余順年, 馬履中, 陳扼西, 等。 新型串并聯(lián)中醫推拿機器人研究[J]. 中國機械工程, 2005(19):84-89.余順年等。
[46] 馬履中, 姚國營(yíng), 倪前磊, 等。 實(shí)現滾法中醫推拿并串混聯(lián)機器人的研究[J].機械設計與研究, 2005(06):43-46.
[47] 余順年, 馬履中, 郭宗和。 中醫推拿手法運動(dòng)學(xué)與動(dòng)力學(xué)特征分析。山東理工大學(xué)學(xué)報(自然科學(xué)版),19.3(2005):82-85.
[48] 余順年, 陳扼西, 馬履中。 基于并聯(lián)機構中醫推拿機器人機型研究。工程設計學(xué)報,13.6(2006):400-405.
[49] Luo R C , Chang C C . Electromyographic evaluation of therapeutic massageeffect using multi-finger robot hand[C]// IEEE International Conference onRobotics and Automation, ICRA 2011, Shanghai, China, 9-13 May 2011. IEEE,2011.
[50] Ying X, Yao T. Simulation and implement of traditional Chinese finger-kneadingbased on hybrid force position control.IEEE(2010):5384 - 5387.
[51] Lei H , Zhentian L . Visual servo control in Massage robot[C]// InternationalConference on Information Science & Engineering. IEEE, 2011.
[52] Xiaoqin Y , Yonggen X . Design and simulation of Chinese massage robot basedon parallel mechanism[C]// Mechanic Automation and Control Engineering(MACE), 2010 International Conference on. IEEE, 2010.
[53] Jingguo W ,Li Y. Massaging human feet by a redundant manipulator equippedwith a tactile sensor[J].IEEE/ASME International Conference on AdvancedIntelligent Mechatronics IEEE, 2010:7-12.
[54] 曾達幸,蘇永林,盧文娟。一種新型五自由度完全解耦串并聯(lián)中醫推拿機器人機構[J].機械設計與研究,2014,30(02): 30-34.
[55] 高煥兵,魯守銀,王濤等。中醫按摩機器人研制與開(kāi)發(fā)[J].機器人,2011,33(05):553-562.
[56] Gao H, Lu S,Wang T, et al. Research and development of Chinese medicalmassage robot[J]. Robot,2011, 33(5): 553-562.
[57] Gao H , Lu S , Wang T. A Dual-arm Cooperating Physiotherapy Service Robot Based on Visual Position[C]. Information Engineering Research Institute,USA.Proceedings of 2013 4th International Conference on Applied Mechanicsand Mechanical Engineering(ICAMME 2013)。Information Engineering ResearchInstitute, USA:智能信息技術(shù)應用學(xué)會(huì ),2013:232-237.
[58] Huang Y , Soueres P , Li J . Contact dynamics of massage compliant robotic armand its coupled stability[C]// 2014 IEEE International Conference on Roboticsand Automation (ICRA)。 IEEE, 2014.
[59] Luo R C , Chen S Y , Yeh K C . Human body Trajectory generation using pointcloud data for robotics massage applications[C]// 2014 IEEE InternationalConference on Robotics and Automation (ICRA)。 IEEE, 2014.
[60] Luo R C , Hsu C W , Chen S Y . Control and Analysis of a Therapeutic MassageRobot: A Milestone of Human-Robot in Physical Contact[C]// Isr: InternationalSymposium on Robotics. VDE, 2016.
[61] Luo R C , Hsu C W , Chen S Y . Electroencephalogram signal analysis as basisfor effective evaluation of robotic therapeutic massage[C]// IEEE/RSJInternational Conference on Intelligent Robots & Systems. IEEE, 2016.
[62] Luo R C , Chen S Y , Yeh K C . Human body Trajectory generation using pointcloud data for robotics massage applications[C]// 2014 IEEE InternationalConference on Robotics and Automation (ICRA)。 IEEE, 2014.
[63] Luo, R C, Tsai C P, and Kai C H . Robot assisted tapping control for therapeuticalpercussive massage applications[C]//2017IEEE International Conference onRobotics and Automation IEEE, 2017.
[64] Luo, R C, Kai C H. Tapping motion detection incorporate with impedancecontrol of robotics tapotement massage on human tissue[J].InternationalWorkshop on Advanced Motion Control 2018:160-165.
[65] 李健。 安全中醫按摩機器人臂系統與控制策略研究[D].北京:北京理工大學(xué),2015.
[66] 彭晨晨。 按摩椅機芯的機構設計與研究[D].杭州:浙江工業(yè)大學(xué),2018.
[67] 宋杰,侯建軍,申黎明。按摩椅按摩頭包覆層對按摩舒適性的影響[J].西北林學(xué)院學(xué)報,2013,28(01):202-206.
[68] 張麗美,師彬。頸椎病中醫辨證分型及中藥治療研究進(jìn)展[J].中成藥,2013,35(07):1522-1525.
[69] 謝俊。中醫推拿機械臂機構設計及運動(dòng)仿真[J].工程設計學(xué)報。2011,18(5):344-348.
[70] 薛衛國。對中醫推拿現代化的思考[J].按摩與導引,2000(06):2-3.
[71] 潘盛輝,馬兆敏,石玉秋,等。機械手空間位姿控制的一種改進(jìn)算法研究及仿真 [J].機床與液壓,2007,35(7):198-200.
[72] 曹德飛。翻引鋼機械手的設計與研究[D].大連:大連理工大學(xué),2006.
[73] 黃晶。擬人足球機器人運動(dòng)學(xué)分析[D].天津:天津大學(xué),2003.
[74] 諸森兒,應富強,魯聰達。積木式機械傳動(dòng)綜合試驗臺的研制[J].杭州:浙江工業(yè)大學(xué)學(xué)報,2000,7(28):258-261.
[75] 李勇。 上肢三自由度頸肩康復按摩機械手設計及仿真分析[D]. 成都:西南交通大學(xué)。 [76] 趙峰。上肢康復輔助訓練機器人設計[D].西安:西安電子科技大學(xué)。2014:21-26.
[77] Wang T , Wang T , Gao H , et al. Research on Indoor Location Method Based onWLAN Signal Location Fingerprints[J]. 2018.
[78] 陳則仕,張秋菊。一種五軸聯(lián)動(dòng)機器人運動(dòng)學(xué)建模與仿真研究[J].制造業(yè)自化2005,27(12):36-39.
[79] Bajd T , Matja? Mihelj, Munih M . Introduction to Robotics[J]. Proceedings ofthe IEEE, 2005, 74(10):1470-1471.
[80] Craig J J , Hsu P , Sastry S S . Adaptive Control of Mechanical Manipulators[C]//Robotics and Automation. Proceedings. 1986 IEEE International Conference on.IEEE, 1986.
[81] 李團結。機器人技術(shù)[M].北京:電子工業(yè)出版社,2009.10.
[82] Anonymous. IBM and Dassault boast new Catia releas [J].ManufacturingComputer Solutions, 2002(March)。
[83] Tickoo S. CATIA V_SR20 for Designers[M]. CADCIM Technologies,2010.
[84] 張紅松,胡仁喜,康士廷,等。ANSYS 12.0 有限元分析從入門(mén)到精通[M].北京:北京機械工業(yè)出版社,2010.
[85] 張莉。新型仿生玉米摘穗機構理論分析與仿真研究[D].長(cháng)春:吉林大學(xué),2015.
[86] 周思路。 黃瓜采摘機械手結構優(yōu)化及其機器視覺(jué)研究[D].長(cháng)春:吉林大學(xué),2019.
[87] 楊峰。機器人機械臂模態(tài)分析及可靠性分析[D].南京:南京理工大學(xué),2013.
[88] 劉秋雨。杏果實(shí)采摘執行機構的研究[D].長(cháng)春:吉林大學(xué),2017.
[89] Duprey S, Bruyere K, Verriest JP. Human shoulder response to side impacts: afinite element study[J]. Computer Methods in Biomechanics & BiomedicalEngineering, 2007, 10(5):361-70.
[90] 洪品。機械臂的有限元建模與振動(dòng)特性分析[D].上海:上海工程技術(shù)大學(xué),2016.
[91] 王剛,楊鶯,劉少軍。虛擬樣機技術(shù)在工程機械領(lǐng)域的應用[J].工程機械,2003,(08): 11-13.
[92] 陳曦。復雜產(chǎn)品虛擬樣機技術(shù)及其應用研究[D].南京:南京理工大學(xué),2005.
[93] 高廣娣,等。典型機械機構 ADAMS 仿真應用[M].北京:電子工業(yè)出版社,2013.
[94] 陳茜。基于視覺(jué)定位的機械臂運動(dòng)控制[D].成都:電子科技大學(xué),2018.
[95] 趙武云,劉艷妍,吳建民。ADAMS 基礎與應用實(shí)例教程[M].北京:清華大學(xué)出版社,2012.3.
[96] 吳懷宇。3D 打印:三維智能數字化創(chuàng )造(第 2 版)[M].北京:電子工業(yè)出版社,2014.11[97] Amit Bandyopadhyay Susmita Bose(美)。3D 打印技術(shù)與應用[M].機械工業(yè)出版社,2017.9.
[98] Bosch. CAN specification(version) [M].1991.
[99] 饒運濤,鄒繼軍。現場(chǎng)總線(xiàn)原理與應用技術(shù)廠(chǎng)[M].北京:北京航空航天大學(xué)出版社,2004.
[100] 郭超。基于壓電薄膜傳感器的可穿戴睡眠監測系統[D].長(cháng)春:吉林大學(xué),2017.
[101] 劉劍清。基于信息融合的變壓器健康狀態(tài)綜合評估系統研究。[D].上海:上海電力學(xué)院,2014.
[102] 程學(xué)慶,房曉溪,韓薪萃,等。LabVIEW 圖形化編程與實(shí)例應用[M].北京:中國鐵道出版社。 [103] 陳樹(shù)學(xué),劉首。LabVIEW 寶典[M].北京:電子工業(yè)出版社。
[104] 李琰。 基于肌電信號的頸肩肌肉疲勞特性研究[D].天津:天津工業(yè)大學(xué),2018
致 謝
時(shí)光如白駒過(guò)隙,研究生的三年學(xué)習時(shí)光也即將落下帷幕。三年的學(xué)習生涯中,每一刻對于我而言都彌足珍貴,讓我不得不加倍珍惜,三年以來(lái),我收獲了成功的喜悅,也經(jīng)歷過(guò)失敗的煩惱,但無(wú)論成功或失敗都將是我寶貴的人生財富,此刻的我是驕傲的,因為我所有的財富都得益于我的良師益友們!
首先要感謝我的導師任露泉教授,老師是我研究生期間的燈塔,不僅為我照亮了科研的道路,更是給我指明了人生的方向,讓我在今后的生活不論遇到什么困難都將砥礪前行!在此向我的老師致以最衷心的感謝。
感謝我的老師任雷教授和錢(qián)志輝教授,感謝兩位老師對我的指導與幫助,兩位老師是我科研生涯的指南針,是你們的耐心指導,讓我少走了許多的彎路,每一周的個(gè)人進(jìn)展匯報都讓我的科研實(shí)力得到釋放與升華,在課題進(jìn)展過(guò)程中遇到困難時(shí),錢(qián)老師都會(huì )耐心地傾聽(tīng)并及時(shí)給予幫助,使得課題得以順利地進(jìn)行的同時(shí),也讓我收獲的科研的信心,在此致以特別的感謝。
感謝我的老師趙宏偉教授,讓我感到欽佩的不僅僅是您的學(xué)識,更是您的人格魅力,感謝老師在生活上和學(xué)習上對我的關(guān)心和幫助,我將視您為榜樣,努力成為國之棟梁。
在此我也要感謝課題組的各位同窗對我的陪伴,感謝各位師兄師姐對我指導與幫助。十分幸運能夠遇到你們,感謝同窗好友王巖和李文博在學(xué)習交流之余陪我加強體育鍛煉;感謝祖新宇、孫一帆、李磊和秦峰在學(xué)習上和生活上對我的啟發(fā)和幫助;另外還要感謝劉思含、王軍炎、梁東奇、嚴家琪、孫書(shū)博、鄭艷芳、徐博文、王吉如、王趙鑫、王強的支持與幫助。
感謝于淼、白元元師兄對我的人生規劃和職業(yè)指導;感謝王坤陽(yáng)、梁威、劉翔宇師兄在學(xué)術(shù)上耐心的指導,感謝劉靜、吉巧麗、吳佳南師姐對我熱心的幫助,謝謝你們。
我還要感謝那些在生活中幫助過(guò)我的人,十分感謝你們的幫助讓我對生活充滿(mǎn)希望,我希望通過(guò)自己的努力將來(lái)能夠回報社會(huì ),回報祖國。
最后我要感謝我的家人,感謝我的女朋友孫昊,你們是人生中幸福的港灣,是你們的支持和奉獻讓我能夠心無(wú)旁騖地投入到學(xué)習中,謝謝你們。
在此感謝所有支持、幫助、關(guān)心過(guò)我的人!
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)