24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
由于人口老齡化問(wèn)題日益嚴重,老年人行走不便、易疲勞等問(wèn)題的出現使得助行設 備被越來(lái)越多的老年人使用。由于大部分助行設備需老年人手動(dòng)控制且多為剛性,導致 地面對肢體產(chǎn)生沖擊造成二次傷害,結合 60~80 歲老年人的實(shí)際運動(dòng)需求,本文設計了 一種通過(guò)表面肌電信號控制的柔性機械肢體,并通過(guò)運動(dòng)學(xué)分析、聯(lián)合仿真、拓撲優(yōu)化 等工作,對該設計進(jìn)行了驗證:
首先根據老年人的運動(dòng)形式和人體結構對柔性機械肢體和柔性關(guān)節的機械結構進(jìn) 行設計,并根據所設計的機械結構對驅動(dòng)方式進(jìn)行選擇。為保證機械肢體與老年人步態(tài) 相配合,達到平衡助力的效果。根據所設計的機械結構,通過(guò)多體動(dòng)力學(xué)軟件 ADAMS 進(jìn)行運動(dòng)仿真和結果分析,獲得機械肢體的關(guān)節轉角、末端支撐的運動(dòng)軌跡,并基于 ADAMS 對柔性關(guān)節進(jìn)行抗沖擊性能分析,進(jìn)而對柔性關(guān)節的抗沖擊性進(jìn)行驗證。
通過(guò)采集老年人下肢特征肌肉群的表面肌電信號,并將其進(jìn)行預處理和特征值提取, 利用短時(shí)傅里葉變換思想獲取特征值的變化趨勢,進(jìn)而推斷出老年人的運動(dòng)意圖,將得 到的運動(dòng)意圖作為柔性機械肢體控制系統的觸發(fā)信號。利用 MATLAB 搭建控制系統, 并與 ADAMS 進(jìn)行聯(lián)合仿真,采用 PD 控制器,實(shí)現聯(lián)合仿真,驗證了柔性機械肢體在 輸入給定信號的情況下的有較好的軌跡跟蹤能力。
基于 ANSYS Workbench 平臺對機械肢體零件進(jìn)行拓撲優(yōu)化設計,使其達到輕量化 設計要求,并對優(yōu)化后的零件進(jìn)行強度校核及位移分析,進(jìn)而對優(yōu)化結構的合理性進(jìn)行 驗證。本文的研究工作對柔性機械肢體的可靠性和有效性提供了科學(xué)依據,為今后的樣機 制作提供了理論基礎,具有重要的理論參考及工程應用價(jià)值。
關(guān)鍵詞:柔性機械肢體;ADAMS 仿真;控制系統;強度校核
Abstract
Due to the increasingly serious problem of population aging, the emergence of problems such as the inconvenience of walking and fatigue of the elderly have made mobility aids used by elderly people. Since most of the walking aids need to be manually controlled by the elderly and are mostly rigid, resulting in the impact of the ground on the limbs and causing secondary injuries, combined with the actual sports needs of the 60~80 elderly, this paper designs a flexible machine controlled by surface EMG signals. Body, and through kinematic analysis, co-simulation, topology optimization and other work, the design was verified:
First, the mechanical structure of the flexible mechanical limbs and flexible joints is designed according to the motion form of the elderly and the human body structure, and the driving mode is selected according to the designed mechanical structure. In order to ensure that the mechanical limbs cooperate with the gait of the elderly to achieve the effect of balance boosting. According to the designed mechanical structure, the multi-body dynamics software ADAMS is used to perform motion simulation and result analysis to obtain the motion trajectory of the joint corners and end supports of the mechanical limbs. Based on ADAMS, the impact resistance performance of the flexible joint is analyzed, and then the flexible joint The impact resistance is verified.
By collecting the surface EMG signal of the characteristic muscle groups of the lower limbs of the elderly, and preprocessing and extracting the characteristic value, the short-time Fourier transform idea is used to obtain the change trend of the characteristic value, and then infer the movement intention of the elderly. The obtained motion intention is used as the trigger signal of the flexible mechanical limb control system. Using MATLAB to build the control system, and conduct joint simulation with ADAMS, and use PD controller to realize the joint simulation, which verifies that the flexible mechanical limb has a better trajectory tracking ability under the condition of inputting a given signal.
Based on the ANSYS Workbench platform, the topological optimization design of mechanical limb parts is carried out to meet the requirements of lightweight design, and the strength check and displacement analysis of the optimized parts are carried out to verify the rationality of the optimized structure. The research work in this article provides a scientific basis for the reliability and effectiveness of flexible mechanical limbs, and provides a theoretical basis for prototype production, which has important theoretical references and engineering application values.
Key Words:Flexible mechanical limbs;Adams simulation;Control system;Strength check

目 錄
第一章 緒論
1.1 課題研究目的和意義
根據來(lái)自《中國人口老齡化發(fā)展現狀、成因與對策研究》的相關(guān)資料可知,近年來(lái), 隨著(zhù)社會(huì )經(jīng)濟的不斷發(fā)展,我國醫療水平以及飲食健康的水平的逐步提高,人口的平均 壽命不斷增加[1].但在生育率降低的條件之下,人口老齡化的問(wèn)題逐漸突顯出來(lái),而且 在未來(lái),我國人口老齡化的問(wèn)題將日益嚴重。尤其 60 到 80 歲的老年人身體機能老化顯 著(zhù),在運動(dòng)過(guò)程中易出現意外。因此,為防止意外事故對老年人造成的危害,隨著(zhù)老年 人助行器的研究不斷深入,傳統康復治療方法的不足通過(guò)機械肢體的方式進(jìn)行了彌補。 近年來(lái),市場(chǎng)上的老年人輔助行走裝備種類(lèi)不斷豐富。如圖 1.1 所示,傳統的裝備有輪 椅、手杖、輪椅、助行車(chē)和外骨骼機器人等。

因此本課題針對 60 歲到 80 歲老年人設計了運動(dòng)輔助裝置柔性機械肢體,該裝置能 輔助老年人保持平衡,并且其中串聯(lián)彈性驅動(dòng)器可以起到緩沖和減振作用,保證老年人 的安全增加機械肢體的柔順性。柔性機械肢體通過(guò)表面肌電信號對人體行為做出識別, 使人與機械肢體之間達到交互的目的,它完全解放了使用者的雙手,使用戶(hù)活動(dòng)更加靈 活、更加自由。 剛性機械肢體對老年人雖然能起到輔助行走的作用,但是由于老年人的身體機能衰 退可能會(huì )對人體產(chǎn)生沖擊造成傷害。而柔性機械肢體的材料采用柔軟、富有彈性、慣性 較低的元件,并在關(guān)鍵位置加入彈性緩沖裝置,不僅能起到輔助老年人運動(dòng)的作用,而 且可以起到緩沖保護作用[2].除此之外,在與人體連接的部分通過(guò)采用輕質(zhì)、耐用的紡
織品方式,對柔性機械肢體的繃帶進(jìn)行布置,以此減少設備產(chǎn)生的剛性運動(dòng)對人體造成 的傷害。柔性機械肢體與人體下肢的運動(dòng)特征有較好的匹配,從而可以實(shí)現對關(guān)節在運 功中功能特性的模擬[3].
1.2 機械肢體的研究現狀
1.2.1 國外研究現狀
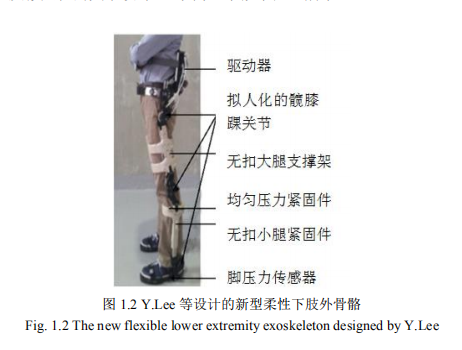
機械肢體用處廣泛,一般用于協(xié)助老年人、行動(dòng)不便者以及需要進(jìn)行康復治療傷員 的關(guān)節運動(dòng)。除此之外,機械肢體也具有力量強化及降低工作疲勞等作用。許多學(xué)者從 機械肢體的結構入手對機械肢體結構的設計進(jìn)行了分析和研究。 Y.Lee 等設計了一種新型的老人可穿戴步行輔助裝置,該裝置具有全新設計的柔性 支撐框架以及擬人化的關(guān)節設計[4].其示意圖如圖 1.2 所示。
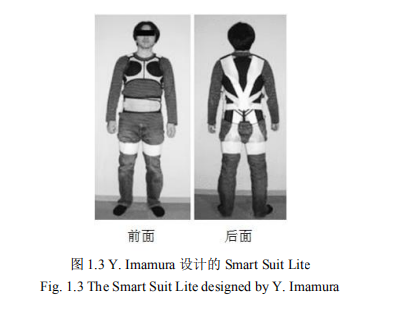
Y. Imamura 等利用目標運動(dòng)與相應的肌肉力之間的關(guān)系來(lái)設計彈性帶的布置和特 性,設計了名為 Smart Suit Lite 的無(wú)源動(dòng)力輔助支持器,該裝置能使受試者感到明顯的 運動(dòng)強化[5],如圖 1.3 所示。
Chen 等通過(guò)運動(dòng)學(xué)/動(dòng)力學(xué)耦合模型的方式,設計了一個(gè)坐臥式外骨骼機器人來(lái)進(jìn) 行下肢康復。在該模型的基礎上,Chen 根據動(dòng)力學(xué)參數識別方法,提出了一種人體下 肢主動(dòng)關(guān)節扭矩的估計方法,以實(shí)現人體運動(dòng)意圖的預測。并通過(guò)扭轉傳感實(shí)驗的方式 對該模型及估算方法進(jìn)行了測試[6]. Sado 設計了一種可穿戴式下身外骨骼以增強進(jìn)行下肢運動(dòng)時(shí)所需要的力量。外骨骼 采用仿生學(xué)設計,每條腿具有六個(gè)自由度,其中有源自由度由雙向無(wú)刷直流電動(dòng)機驅動(dòng), 骨骼控制器采用低級線(xiàn)性二次高斯扭矩控制器實(shí)現對與運動(dòng)的檢測和力量的控制。通過(guò) 實(shí)驗測試得出該外骨骼可使特定肌肉激活最小化可以達到 36%以上[7]. Lovrenovic 和 Doumit 針對步行輔助外骨骼提出了一種被動(dòng)式外骨骼的開(kāi)發(fā)方法, 這種外骨骼通過(guò)無(wú)動(dòng)力的座椅機構使用者的骨盆上產(chǎn)生向上的力,從而增強站立和行走 過(guò)程中的活動(dòng)能力[8].并且通過(guò)實(shí)驗評估了該種開(kāi)發(fā)方法開(kāi)發(fā)出的步行輔助外骨骼的性 能。Kawale 和 Sreekumar 基于運動(dòng)學(xué)和動(dòng)力學(xué)分析的結果,對設計變量進(jìn)行優(yōu)化后,提 出了一種可穿戴式下身外骨骼機構的概念設計,該機構可減輕使用人員下半身的身體疲 勞同時(shí)提高使用人員的負荷能力[9]. 對于柔性機械肢體而言,其輔助運動(dòng)的控制策略對柔性機械肢體的驅動(dòng)作用是否符 合人體正常運動(dòng)規律起關(guān)鍵作用。如何建立人類(lèi)下肢運動(dòng)模型,以及選擇何種控制策略 是優(yōu)化柔性機械肢體的重要部分。
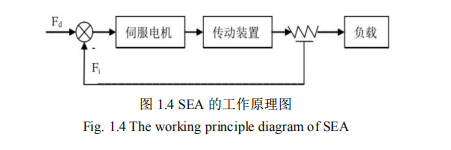
Sherwani 等為了在減少干擾影響的同時(shí)實(shí)現對運動(dòng)跟蹤的準確性,開(kāi)發(fā)了一種自適 應 RISE(信號誤差的魯棒積分)控制器,并在一種智能交流和對意圖敏感的外骨骼膝蓋外骨骼上進(jìn)行實(shí)驗測試[10].實(shí)驗證明,與傳統控制器相比,該種控制器的跟蹤誤差更 低。Kazemi 和 Ozgoli 將成本函數用于增加運動(dòng)軌跡的平滑度,通過(guò)優(yōu)化反饋控制器使 成本函數最小化的方式跟蹤邊界條件,并使用逆運動(dòng)學(xué)轉換生成適當的關(guān)節角度,實(shí)現 了對人類(lèi)步行模式的建模[11]. 為了使機械肢體輔助運動(dòng)的過(guò)程與人體運動(dòng)過(guò)程更好的匹配,同時(shí)為了防止機械肢 體在輔助運動(dòng)過(guò)程中對人體造成剛性沖擊。輔助運動(dòng)的機械肢體一般都進(jìn)行驅使軀體運 動(dòng)過(guò)程更加平穩的柔性處理。串聯(lián)彈性驅動(dòng)器(SEA)是一種具有低輸出阻抗的力輸出 驅動(dòng)裝置,其廣泛應用于機械肢體柔性處理的過(guò)程當中,是實(shí)現機械肢體柔性處理的核 心部分,其工作原理圖如圖 1.4 所示。
Hong 等通過(guò)運動(dòng)學(xué)分析的研究方式,立足于仿生學(xué)角度,從青蛙的跳躍過(guò)程中獲 得思路,采用了無(wú)閂鎖機構的串聯(lián)彈性驅動(dòng)器替代了小型跳躍機器人原有的彈射驅動(dòng)機 構[12].與原有彈射機構相比,串聯(lián)彈性驅動(dòng)器與彈性聯(lián)結裝置結合后,能發(fā)揮出更大彈 性?xún)δ軆?yōu)勢。 Sun 等針對串聯(lián)彈性驅動(dòng)器在機械肢體人機交互過(guò)程中所產(chǎn)生的來(lái)自外界感染及載 荷反饋參數變化負面影響,提出了一種實(shí)用的限時(shí)輸出反饋控制器(FT-OFC)以及限 時(shí)擴展狀態(tài)觀(guān)察器(FT-ESO)來(lái)生成串聯(lián)彈性驅動(dòng)器所需的扭矩[13].隨后基于 Lyapunov 分析,證明了反饋及觀(guān)察裝置的可靠性及準確性。 Yano 等對應用于 Biped 機器人的串聯(lián)彈性驅動(dòng)器進(jìn)行了分析,認為當前的串聯(lián)彈 性驅動(dòng)器在強度、驅動(dòng)力輸入控制以及長(cháng)時(shí)間工作耐久等方面仍然存在問(wèn)題,于是通過(guò) 數值仿真的方式測試了優(yōu)化關(guān)節軌跡彈簧剛度以及采用一種輸入-輸出線(xiàn)性化的軌跡跟 蹤控制法兩種方法的可行性[14].
Zhao 和 Sentis 出于串聯(lián)彈性執行器在有關(guān)設計最佳的阻抗控制器、表征具有時(shí)間延 遲和濾波的 SEA 的阻抗性能等方面的考慮,提出了一種 SEA 級聯(lián)控制體系結構設計臨界阻尼增益設計方法來(lái)解決最優(yōu)控制器設計問(wèn)題[15].該方法由外阻抗和內轉矩反饋回路 組成,并經(jīng)過(guò)仿真和實(shí)驗方法得到了測試。 Li 等將串聯(lián)彈性執行器應用于肌肉張力訓練設備,并確定了一套肌肉訓練過(guò)程中基 于傳感器所獲取的電反饋信號和預設的肌肉鍛煉模式來(lái)推導增益調度函數的剛度自適 應增益算法[16]. Marconi 等采用實(shí)驗測試的方法,分析了應用于 Hande Xos-Beta 手指康復新型食指 拇指外骨骼的串聯(lián)彈性執行器的包括頻率響應、末端執行器力和輸出阻抗及轉矩控制系 統性能等方面的工作狀態(tài)[17]. Stuhlenmiller 等以能量消耗最小化程度作為串聯(lián)彈性驅動(dòng)器優(yōu)化的衡量準則,研究 了步態(tài)變化對膝關(guān)節串聯(lián)彈性驅動(dòng)器能量消耗和約束的影響[18].結果表明步態(tài)節奏越慢, 串聯(lián)彈性驅動(dòng)器能量消耗越大;且與串聯(lián)彈性致動(dòng)器相比,可離合的串聯(lián)彈性致動(dòng)器受 約束的影響較小。
1.2.2 國內研究現狀
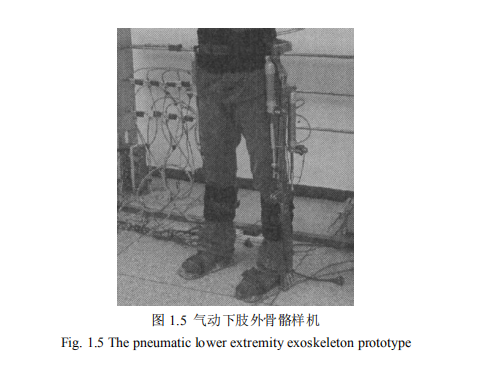
浙江大學(xué)研發(fā)的外骨骼將使用者的行為與外骨骼機器的行為能力進(jìn)行了結合,將使 用者的腳底的壓力傳感器作為輸入信號,并基于此思想結合模糊神經(jīng)網(wǎng)絡(luò )控制理論[19]. 設計出了一種以氣動(dòng)系統為驅動(dòng)裝置的新型的可穿戴式下肢步行外骨骼機構,如圖 1.5 所示。
哈爾濱工業(yè)大學(xué)設計了一種助力型外骨骼機器人,分析了人體的身體結構及運動(dòng)特 點(diǎn)。該機器人將髖關(guān)節、膝關(guān)節矢狀面內的伸屈設計為主動(dòng)自由度[20].通過(guò)傳感器對下 肢運動(dòng)過(guò)程中髖關(guān)節角度、力矩檢測及姿態(tài)位置進(jìn)行檢測,同時(shí)基于 Kalman 濾波器對 多傳感器信息進(jìn)行融合,濾除干擾信號,以滿(mǎn)足控制算法的要求。不同步行相位采用了 不同的控制策略,實(shí)現了閉環(huán)控制,并在模糊增益的配合下縮小了機器人在跟進(jìn)人體運 動(dòng)過(guò)程所產(chǎn)生的誤差。哈爾濱工業(yè)大學(xué)的李洪武設計了一種輔助穿戴者完成負重行走及 增強穿戴者運動(dòng)能力的外骨骼機器人,并將研究重點(diǎn)放在了作用于人機信息交互的傳感 器上,從而研發(fā)出了一種優(yōu)化信息交互傳感器[21].哈爾濱工業(yè)大學(xué)的陳凱旋采用串聯(lián)彈 性驅動(dòng)器對水下機械臂進(jìn)行了關(guān)節部位的柔順化設計。設計過(guò)程對比了多種不同類(lèi)型串 聯(lián)彈性驅動(dòng)器,并最終采用交錯梁式盤(pán)狀串聯(lián)彈性驅動(dòng)器作為柔性關(guān)節元件[22].PID 單 位負反饋的方式被應用于串聯(lián)彈性驅動(dòng)器設計,從而完成了力源控制模型傳遞函數的推 算。設計出的串聯(lián)彈性驅動(dòng)器通過(guò)仿真模擬實(shí)現了串聯(lián)彈性驅動(dòng)器優(yōu)化的驗證。
北方工業(yè)大學(xué)的蔣聰等人針對扭轉傳感器提出了一種應用于串聯(lián)彈性驅動(dòng)器的扭 矩傳感器設計方案[23].扭矩傳感器作為驅動(dòng)力信號及負載反饋信號的接收器,其彈性參 數信號接受處理的方法對串聯(lián)彈性驅動(dòng)器負載反饋延遲及運動(dòng)反饋精準度有重要影響。 總結扭矩傳感器的設計指標以及關(guān)鍵參數的設計方法。
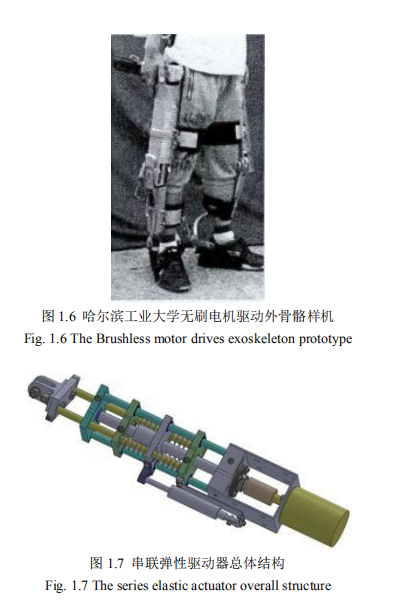
南開(kāi)大學(xué)的于寧波和鄒武林針對串聯(lián)彈性驅動(dòng)器的剛度控制問(wèn)題,分析串聯(lián)彈性驅 動(dòng)器在工作過(guò)程的有限頻域特性,采用限制有限頻域的方法實(shí)現串聯(lián)彈性驅動(dòng)器剛度的 控制,將有限頻域的變化轉化為相應矩陣不等式進(jìn)而得出待求靜態(tài)反饋控制器的控制條 件[24].串聯(lián)彈性驅動(dòng)器(SEA)使整個(gè)輔助運動(dòng)過(guò)程更加平穩、準確、可控。從一定程度 上來(lái)說(shuō),串聯(lián)彈性驅動(dòng)器的設計及研究水平是機械肢體柔性處理的重要方法。為此,國 內眾多學(xué)者也對以串聯(lián)彈性驅動(dòng)器為載體的機械肢體柔性處理柔化方法進(jìn)行了研究及 分析。哈爾濱工業(yè)大學(xué)以串聯(lián)彈性驅動(dòng)器作為外骨骼機器人關(guān)節部位的柔化組件,并設計 了自適應穩定控制器以實(shí)現對虛擬肢體的關(guān)節跟隨運動(dòng)[25],其結構如圖 1.6 所示。哈爾 濱工業(yè)大學(xué)的王勇利針對彈跳機器人設計出了一種直線(xiàn)型的串聯(lián)彈性驅動(dòng)器,改驅動(dòng)器 以伺服電機為驅動(dòng)力[26],以柔性彈簧作為柔性處理裝置,其原理圖如圖 1.7 所示。
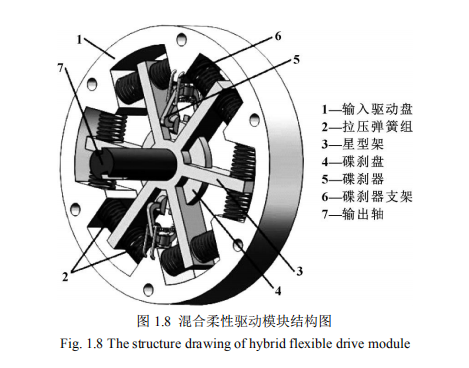
華南理工大學(xué)出于降低癱瘓患者下肢康復成本的考慮設計了組合剛性骨架和柔性 驅動(dòng)方式的穿戴式下肢康復外骨骼[27].具體分析了癱瘓患者康復過(guò)程中下肢的運動(dòng)情況, 建立了人體-外骨骼多剛體模型并對模型進(jìn)行運動(dòng)仿真分析。 山東科技大學(xué)的李金良等設計了一種基于串聯(lián)彈性驅動(dòng)和剛性驅動(dòng)混合的新型下 肢外骨骼機器人踝關(guān)節[28].如圖 1.8 所示,其特點(diǎn)是在驅動(dòng)裝置及從動(dòng)裝置之間設立了 柔性連接以實(shí)現降低緩沖的作用。最后通過(guò)仿真實(shí)驗的方式測定了該關(guān)節的頻域特性、 不同參數特性下的穩定性以及力跟隨特性。
江蘇大學(xué)的陳樹(shù)洋設計了一種大眾化的下肢外骨骼助力機器人,通過(guò) D-H 參數法和 微分變換法,對外骨骼助力機器人進(jìn)行正、逆運動(dòng)學(xué)理論分析,基于拉格朗日方程對外 骨骼進(jìn)行逆動(dòng)力學(xué)理論分析,最終通過(guò)采用模擬仿真計算的方式對柔性下肢外骨骼助力 機器人進(jìn)行了剛柔耦合仿真計算[29]. 南京航空航天大學(xué)的張子建等為了進(jìn)一步提高串聯(lián)彈性驅動(dòng)器在關(guān)節部位的柔順 特性,設計了一種采用雙圓環(huán)間銜接曲梁結構的串聯(lián)彈性驅動(dòng)器模型,并通過(guò)仿真模擬 驗證其可行性[30]. 綜合以上對國內外機械肢體的分析,本文采用通過(guò)表面肌電信號判定老年人運動(dòng)意 圖的控制系統,并在髖關(guān)節、膝關(guān)節處設計串聯(lián)彈性驅動(dòng)器機械結構,不僅能夠起到保 護老年人的作用,而且可以對沖擊力進(jìn)行緩沖的作用。
1.3 主要研究?jì)热?/strong>
本文主要內容如下:
(1)結合 60 歲到 80 歲老年人的運動(dòng)特征,提出柔性機械肢體的設計方案,并通 過(guò) SolidWorks 對柔性機械肢體進(jìn)行建模設計,并對柔性關(guān)節進(jìn)行設計和彈簧參數設定, 通過(guò)柔性機械肢體的機械結構選擇適合的驅動(dòng)方式。
(2)對老年人的人體步態(tài)進(jìn)行分析,使機械肢體與使用者配合保持平衡達到輔助 功能。通過(guò) ADAMS 對柔性機械肢體的虛擬樣機進(jìn)行運動(dòng)學(xué)仿真,并對柔性關(guān)節的抗沖 擊性進(jìn)行 ADAMS 仿真分析,驗證所建機械模型的可靠性。
(3)對老年人下肢特征肌肉群的肌電信號進(jìn)行采集和分析,對肌電信號進(jìn)行預處 理、特征值提取,進(jìn)而確定老年人行走時(shí)的意圖,最后建立 MATLAB 與 ADAMS 聯(lián)合 仿真系統進(jìn)行仿真,實(shí)現機械肢體的聯(lián)合仿真。
(4)使用 ANSYS Workbench 軟件進(jìn)行拓撲優(yōu)化設計,對關(guān)鍵件進(jìn)行拓撲優(yōu)化,改 變起始設計的模型形狀使其重量減輕,對優(yōu)化前后零件的結構位移、應力進(jìn)行對比,使 機械肢體優(yōu)化之后的零件在設計要求之內,符合設計的要求。
第二章 柔性機械肢體的結構設計與分析
2.1 柔性機械肢體的機械結構設計
2.1.1 老年人運動(dòng)形式與下肢結構分析
2.1.2 柔性機械肢體結構設計要求
2.1.3 柔性機械肢體的結構設計
2.2 驅動(dòng)方式選擇
本章小結
第三章 柔性機械肢體 ADAMS 仿真
第三章 柔性機械肢體 ADAMS 仿真
3.1 老年人人體步態(tài)分析
3.2 柔性機械肢體 ADAMS 仿真分析
3.2.1 ADAMS 仿真過(guò)程
3.2.2 ADAMS 仿真結果分析
3.3 柔性關(guān)節 ADAMS 仿真
本章小結
第四章 機械肢體控制系統設計及聯(lián)合仿真分析
4.3.1 表面肌電信號的產(chǎn)生原理
4.3.2 表面肌電信號的特征
4.4 表面肌電信號采集
4.4.1 肌群分析
4.4.2 電極位置的確定
4.5 對表面肌電信號的處理
4.5.1 表面肌電信號預處理
4.5.2 特征參數的提取
4.6 聯(lián)合仿真系統
4.6.1 控制方案
4.6.2 ADAMS/MATLAB 聯(lián)合仿真控制系統的建立
4.6.3 聯(lián)合仿真結果分析
本章小結
第五章 關(guān)鍵零件拓撲優(yōu)化設計及強度分析
5.1 拓撲優(yōu)化設計
5.1.1 拓撲優(yōu)化設計概述
5.1.2 拓撲優(yōu)化設計
5.2 關(guān)鍵零件優(yōu)化前后位移對比
5.3 關(guān)鍵零件優(yōu)化前后強度校核對比
本章小結
結 論
本文主要針對老年人運動(dòng)過(guò)程中需要運動(dòng)輔助裝置的需求,基于 60~80 歲老年人的 運動(dòng)形式和人體結構,設計一種柔性機械肢體裝置。論文主要進(jìn)行了柔性機械肢體機械 結構設計、ADAMS 仿真、柔性機械肢體的控制系統的設計、ADAMS/MATLAB 聯(lián)合仿 真、以及機械肢體的拓撲優(yōu)化設計和強度分析等工作,得出以下結論:
(1)通過(guò)對老年人運動(dòng)形式和人體結構特點(diǎn)分析,提出柔性機械肢體的總體方案, 使用 SolidWorks 對柔性機械肢體進(jìn)行建模,并對柔性關(guān)節工作原理進(jìn)行詳細闡述,對柔 性關(guān)節和重要零件進(jìn)行詳細的結構設計分析。通過(guò)柔性機械肢體的結構計算關(guān)節電機的 驅動(dòng)力矩,最后選擇 DS5160 舵機作為驅動(dòng)電機。
(2)通過(guò)多體動(dòng)力學(xué)軟件 ADAMS 對機械肢體進(jìn)行運動(dòng)仿真和結果分析,得出機 械肢體關(guān)節轉角、末端支撐的運動(dòng)軌跡,驗證所建機械結構符合運動(dòng)要求。并對柔性關(guān) 節施加脈沖力信號和瞬時(shí)力信號,得出柔性關(guān)節的輸出部件的受力曲線(xiàn)和速度曲線(xiàn),驗 證了柔性關(guān)節的抗沖擊性能。
(3)對柔性機械肢體的控制系統進(jìn)行設計,首先選取老年人下肢特征肌群進(jìn)行信 號采集,并且對肌電信號進(jìn)行預處理,提取其特征值,利用短時(shí)傅里葉變換思想得到特 征值的變化趨勢,最終得到了老年人行走的運動(dòng)意圖。然后使用 MATLAB 搭建控制系 統與 ADAMS 進(jìn)行聯(lián)合仿真,采用 PD 控制器,結合表面肌電信號對運動(dòng)意圖的識別, 在輸入給定信號的情況下進(jìn)行仿真分析,得到預期的仿真結果,驗證了控制系統的可行 性。
(4)使用 ANSYS Workbench 軟件進(jìn)行拓撲優(yōu)化分析,完成機械肢體關(guān)鍵零件的拓 撲優(yōu)化。通過(guò)改變機械肢體零件的結構,達到了減重 30%的目標。并對優(yōu)化之后的機械 肢體進(jìn)行強度校核,拓撲優(yōu)化后的機械肢體各個(gè)零件均符合強度要求,驗證設計的可靠 性。
參 考 文 獻
[1] 秦敏花。 中國人口老齡化發(fā)展現狀成因與對策研究[J]. 企業(yè)科技與發(fā)展, 2019-09-10.
[2] 張建中, 胡化增, 張廣浩, 等。 下肢外骨骼機器人研究現狀及發(fā)展趨勢[J]. 科技創(chuàng )新與應用, 2018(29): 72-73.
[3] 周偉杰, 韓亞麗, 朱松青, 等。 柔性外骨骼助力機器人發(fā)展現狀綜述[J]. 南京工程學(xué)院學(xué)報(自 然科學(xué)版), 2019, 17(01): 31-38.
[4] Lee Y, Kim Y, Lee J, et al. Biomechanical Design of a Novel Flexible Exoskeleton for Lo wer Extremities[J]. IEEE/ASME Transactionson Mechatronics IEEE/ASME Transactions on M echatronics, 2017, 22; 22(5; 5): 2058-2069.
[5] Imamura Y, Tanaka T, Suzuki Y, et al. Motion-based design of elastic belts for passive assistive device using musculoskeletal model: 2011 IEEE International Conference on Robotics and Biomimetics 2011 IEEE International Conference on Robotics and Biomimetics, 2011[C].Journal of Mechanical Design, 2009, 131.
[6] Chen J, Huang Y, Guo X, et al. Parameter identification and adaptive compliant control of rehabilitation exoskeleton based on multiple sensors[J]. Measurement, 2020,159: 107-765.
[7] Sado F, Yap H J, Ghazilla R A R, et al. Design and control of a wearable lower-body exoskeleton for squatting and walking assistance in manual handling works[J]. Mechatronics, 2019, 63: 102-272.
[8] Lovrenovic Z, Doumit M. Development and testing of a passive Walking Assist Exoskeleton[J]. Biocybernetics and Biomedical Engineering, 2019, 39(4): 992-1004.
[9] Kawale S, Sreekumar M. Design of a Wearable Lower Body Exoskeleton Mechanism for Shipbuilding Industry[J]. Procedia Computer Science, 2018, 133: 1021-1028.
[10] Sherwani K I K, Kumar N, Chemori A, et al. RISE-based adaptive control for EICOSI exoskeleton to assist knee joint mobility[J]. Robotics and Autonomous Systems, 2020, 124: 103-354.
[11] Kazemi J, Ozgoli S. Real-time walking pattern generation for a lower limb exoskeleton, implemented on the Exoped robot[J]. Robotics and Autonomous Systems, 2019, 116: 1-23.
[12] Hong C, Tang D, Quan Q, et al. A combined series-elastic actuator & parallel-elastic leg no-latch bio-inspired jumping robot[J]. Mechanism and Machine Theory, 2020, 149: 103-814.
[13] Sun L, Li M, Wang M, et al. Continuous finite-time output torque control approach for series elastic actuator[J]. Mechanical Systems and Signal Processing, 2020,139:105-853.
[14] Yano H, Chang J, Takano R, et al. Simultaneous Optimization of Trajectory and Parameter for Biped Robot with Series Elastic Actuators[J]. IFAC-Papers OnLine, 2019, 52(22): 7-12.
[15] Zhao Y, Sentis L. Chapter 2 - Distributed impedance control of latency-prone robotic systems with series elastic actuation[M]//Gao Q, Karimi H R. Stability, Control and Application of Time-delay Systems. Butterworth-Heinemann, 2019:23-51.
[16] Li J, Li S, Tian G, et al. Muscle tension training method for series elastic actuator (SEA) based on gain-scheduled method[J]. Robotics and Autonomous Systems, 2019, 121: 103-253.
[17] Marconi D, Baldoni A, McKinney Z, et al. A novel hand exoskeleton with series elastic actuation for modulated torque transfer[J]. Mechatronics, 2019, 61: 69-82.
[18] Stuhlenmiller F, Clos D, Rinderknecht S, et al. Impact of friction and gait parameters on the optimization of series elastic actuators for gait assistance[J]. Mechanism and Machine Theory, 2019, 133: 737-749. [19] 牛彬。 可穿戴式的下肢步行外骨骼控制機理研究與實(shí)現[D]. 浙江大學(xué), 2006.
[20] 李政陽(yáng)。 基于混合相位控制的下肢外骨骼系統設計與研究[D]. 哈爾濱工業(yè)大學(xué), 2018.
[21] 李洪武。 下肢助力外骨骼人機交互力傳感器設計及控制方法研究[D]. 哈爾濱工業(yè)大學(xué), 2018.
[22] 陳凱旋。 基于 SEA 的柔性關(guān)節結構設計及控制方法研究[D]. 哈爾濱工程大學(xué), 2019.
[23] 蔣聰, 孫愷, 何廣平。 串聯(lián)彈性驅動(dòng)器內嵌扭矩傳感器的研究[J]. 儀表技術(shù)與傳感器, 2020(03): 15-21.
[24] 于寧波, 鄒武林。 有限頻域約束下串聯(lián)彈性驅動(dòng)器的剛度控制[J]. 控制理論與應用, 2019, 36(05): 711-719.
[25] Zhu Y, Yang J, Jin H, et al. Design and evaluation of a parallel-series elastic actuator for lower limb exoskeletons: 2014 IEEE International Conference on Robotics and Automation (ICRA) 2014 IEEE
[26] 王勇利。 基于電機控制的低阻抗彈性驅動(dòng)器設計[D]. 哈爾濱工業(yè)大學(xué), 2010.
[27] 黃樂(lè )登。 面向偏癱患者的穿戴式下肢康復外骨骼的研究[D]. 華南理工大學(xué), 2019.
[28] 李金良, 鄭偉, 王德堂, 等。 下肢外骨骼機器人踝關(guān)節混合柔性驅動(dòng)設計與研究[J]. 機床與液 壓, 2019, 47(15): 42-48.
[29] 陳樹(shù)洋。 下肢外骨骼助力機器人結構設計與仿真分析[D]. 江蘇大學(xué), 2018.
[30] 張子建, 杜云鵬, 韓少杰, 等。 機械臂柔性關(guān)節 SEA 設計與仿真分析[J]. 機械傳動(dòng), 2019, 43(10): 92-96.
[31] 張秀麗, 谷小旭, 趙洪福, 王昆, 等。 一種基于串聯(lián)彈性驅動(dòng)器的柔順機械臂設計[J]. 機器人, 2016.
[32] 張蘄等。人體平衡能力定量測評[J] .中國康復,1998,13(2):49-5. [33] 陳文。 一種新型可穿戴式助行機器人的研究[D]. 南昌大學(xué), 2014.
[34] 鄭靜, 夏風(fēng)林, 劉浪。 基于 Simulink 的經(jīng)編機電子橫移系統仿真[J]. 紡織學(xué)報, 2018.
[35] 趙慧云。 基于柔性仿生關(guān)節的四足機器人單腿機構設計與分析[D]. 河北工業(yè)大學(xué), 2015.
[36] Perry J, KST, Davids J R. Gait Analysis: Normal and pathological Function [J].Physiotherapy, 2010, 97(2): 180.
[37] 賈利曉。 人體行走過(guò)程中的滑摔傾向及其機制與防控研究[D]. 機械科學(xué)研究總院, 2013.
[38] 何強龍。 雙通道差動(dòng)傳動(dòng)機器人關(guān)節的研究與設計[D]. 東北大學(xué), 2013.
[39] 劉晉霞。 ADSAMS 2012 虛擬樣機從入門(mén)到精通[M]. 機械工業(yè)出版社, 2013.
[40] 呼昊。 3DOF 可穿戴式上肢康復機器人結構設計及仿真研究[D]. 哈爾濱工程大學(xué), 2008.
[41]Guo jun W, Lin hong X, Fu lun H, et al.Kinematics Simulation to Manipulator of Welding Robot Based on ADAMS[C]. Intelligent Systems and Applications, ISA2009. International Workshop on. IEEE 2009: 1-4.
[42] 吳天昊。 基于 3 軸加速度傳感器及陀螺儀的老年人摔倒識別[D].北京工業(yè)大學(xué),2013.
[43] 鄢麗娟, 張彥虎。 老年人意外摔倒智能報警腰帶系統的研究[J]. 電子技術(shù)與軟件工程, 2018(24): 61-63.
[44] 邱石, 杜義浩, 王浩, 謝平, 于金須。 基于 sEMG 的下肢運動(dòng)解析方法研究[J]. 儀器儀表學(xué)報。2018, 39(02): 30-37.
[45] Y. Huang, K.B. Englehart, B. Hudgins, A.D.C. Chang, "A Gaussian mixtrure model based classification scheme for myoelectric control of powered upper limb prostheses", IEEE Trans. Biomed. Eng., 53(11): 1801-1811, 2005.
[46] M. León, J.M. Gutiérrez, L. Leija, R. Mu?oz.EMG pattern recognition using Support Vector Machines classifier for myoelectric control purposes[J].IEEE.
[47] Merlrtti R,Knaflitz M, Deluca C J.Electrically evoked myoelectric signals[J]. Crit Rev Biomed Eng, 1992, 9(2): 119.
[48] 沈陽(yáng)醫學(xué)院編繪。 人體解剖圖譜[M]. 人民出版社, 1973.
[49] De Luca C J.Surface electromyography: Detection and recording[J]. DelSys Incorpor-ated, 200 2, 10: 201. [50] De Luca C J. Practicum on the use of surface EMG signals in movement sciences [J]. Delsys Ins, ISBN, 2008: 978.
[51] 馬如奇, 郝雙暉, 鄭偉峰, 等。 基于 MATLAB 與 ADAMS 的機械臂聯(lián)合仿真研究[J]. 機械設計 與制造, 2010, (4): 93-95.
[52] 張剛。 機器人機械臂的動(dòng)力學(xué)分析及其拓撲優(yōu)化設計[D]. 寧波大學(xué), 2011.
[53] 馬國慶。 移動(dòng)服務(wù)機器人機械臂結構設計及其優(yōu)化研究[D]. 哈爾濱工業(yè)大學(xué), 2014.
致 謝
時(shí)光匆匆而過(guò),回想起兩年前剛進(jìn)入校園的情景,如今我還歷歷在目,仿佛還在昨 天。從那時(shí)起我的研究生生活也正式開(kāi)始了,我非常榮幸能在導師選擇的時(shí)候,拜入王 廣欣老師門(mén)下,他的和藹可親與學(xué)術(shù)水平給我留下了深刻的印象。在這兩年中,我結識 了許多同學(xué)、朋友以及老師,他們都給予了我很大的幫助。
在王廣欣老師的指導與幫助下,我完成了此次論文,兩年研究生生活中,王老師在 學(xué)術(shù)上的認真、專(zhuān)研、嚴謹負責的態(tài)度,給我留下深刻的印象。王老師十分耐心地對我 在學(xué)習上進(jìn)行指導,讓我遇到問(wèn)題要全面思考,使我受益匪淺。在生活中,老師積極樂(lè ) 觀(guān)向上的態(tài)度和他對家庭的負責,是我人生道路中的寶貴財富。在撰寫(xiě)畢業(yè)論文期間, 老師經(jīng)常給予我建議以及指導,不管何時(shí)我向老師討教,老師都會(huì )細心的給我進(jìn)行解答, 在這里我想對老師表示感謝,遇到您是我人生的一大幸事。
此外,我還要感謝同教研室的同學(xué),師兄師弟們,寢室的室友以及我的朋友們,我 很慶幸身邊有你們的存在,讓我在兩年的研究生生活中并不孤單,我們共同學(xué)習,共同 進(jìn)步,共同成長(cháng),是你們在枯燥乏累之時(shí)給予我快樂(lè ),謝謝你們。
我還要感謝我的父母,感謝你們 20 多年的辛勤付出以及諄諄教誨,你們的辛苦我 都看在眼里記在心里,沒(méi)有你們的支持與鼓勵,我不會(huì )有今日的閃光。我如同一只小鳥(niǎo), 你們任我飛翔,無(wú)論在高處或在低處飛翔,你們都會(huì )在我的背后做我堅強后盾,讓我有 所依靠。最后感謝各位專(zhuān)家、教授在百忙之中抽出時(shí)間對我的論文進(jìn)行評閱,謝謝你們給予 的建議以及啟迪。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)