24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
鈑金件折彎是工業(yè)生產(chǎn)中一種重要的加工方法,折彎工藝在很大程度上決定了鈑金件的最終質(zhì)量和折彎精度。目前,制造業(yè)正朝著(zhù)信息化和自動(dòng)化的方向發(fā)展,隨著(zhù)機器人技術(shù)的日益成熟,它們不止是工業(yè)制造中的勞動(dòng)力,更可以完成一些危險且具高難度的任務(wù)。同時(shí),與機器人相關(guān)的課題一直是研究熱點(diǎn),如路徑規劃、運動(dòng)和協(xié)同控制等。隨著(zhù)現代企業(yè)對采用機器人配合折彎機進(jìn)行折彎作業(yè)的需求逐漸增高,本文對五自由度機械臂的折彎操作進(jìn)行研究,并在此基礎上,以互聯(lián)網(wǎng)為媒介搭建了網(wǎng)絡(luò )化遠程控制系統,從而實(shí)現了遠程控制機器人進(jìn)行折彎加工的目的,提高了機器人折彎工藝的智能化和自動(dòng)化程度。
本文根據五自由度直角坐標折彎機器人,進(jìn)行包括運動(dòng)分析、軌跡規劃及遠程控制等關(guān)鍵技術(shù)在內的研究與實(shí)驗。具體如下:
首先,對五自由度機械臂的總體結構設計進(jìn)行闡述,并搭建五自由度直角坐標折彎機器人硬件平臺。針對折彎機器人控制系統所用到的伺服驅動(dòng)器和運動(dòng)控制卡,進(jìn)行軟件調試與系統控制程序的編寫(xiě)。
其次,對機器人折彎工藝路徑規劃進(jìn)行研究,通過(guò)建立五自由度直角坐標折彎機器人連桿坐標系,得到 D-H 參數并進(jìn)行相關(guān)的運動(dòng)學(xué)分析,求得機器人運動(dòng)學(xué)方程。在此基礎上再對機器人實(shí)際折彎工藝中的折彎路徑進(jìn)行程序編寫(xiě)。
之后,對機器人運動(dòng)軌跡在關(guān)節空間和笛卡爾空間中分別進(jìn)行運動(dòng)規劃。利用多項式插補規劃運動(dòng)過(guò)程中的關(guān)節速度,利用分段函數組合正弦函數規劃在無(wú)障礙物環(huán)境中的折彎軌跡,利用基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)法規劃在有障礙物環(huán)境中的避障軌跡。通過(guò)數學(xué)模型并應用 Matlab 軟件來(lái)驗證上述算法對機器人進(jìn)行折彎加工運動(dòng)的可行性。
最后,使用物聯(lián)網(wǎng)技術(shù)和 Python 開(kāi)發(fā)技術(shù)通過(guò)網(wǎng)絡(luò )服務(wù)器將各類(lèi)終端與五自由度機械臂進(jìn)行結合,實(shí)現基于物聯(lián)網(wǎng)的機器人遠程控制,并通過(guò)實(shí)驗進(jìn)行驗證。
關(guān)鍵詞: 五自由度機器人,運動(dòng)控制,軌跡規劃,網(wǎng)絡(luò )化遠程控制

Abstract
Sheet metal bending is an important processing method in industrial production, and thebending process largely determines the final quality and bending accuracy of sheet metal parts to agreat extent. At present, the manufacturing industry is developing towards the direction ofinformatization and automation. With the increasingly mature application of robot technology, theyare not only the labor force in industrial manufacturing, but also able to complete some dangerousand difficult tasks. Due to the continuous development of industrial robots towards automation, thetopics related to robots have been the focus of research, such as path planning, motion andcooperative control. With the increasing demand of modern enterprises for using robot to cooperatewith bending machine for bending operation, this paper studies the bending operation of thefive-degree-of-freedom manipulator, and on this basis, a networked remote control system is builtusing the internet as the medium, so as to realize the purpose remotely controlling the robot, andimprove the degree of intelligence and automation of the robotic bending process.
Based on the five-degree-of-freedom rectangular coordinate bending robot, this paper conductsresearch and experiments including key technologies such as motion analysis, trajectory planning,and remote control. Specifically as follows:
Firstly, the overall structure design of the five-degree-of-freedom manipulator is described, andthe hardware platform of the five-degree-of-freedom rectangular coordinate bending robot is built.
According to the servo driver and motion control card used in the control system of bending robot,software debugging and system control program writing were carried out.
Secondly, the robot bending process path planning is studied. By establishing thefive-degree-of-freedom rectangular coordinate bending robot connecting rod coordinate system, theD-H parameters are obtained and the relevant kinematics analysis is carried out to obtain the robotkinematics equation. On this basis, the bending path in the robot bending process is programmed.
After that, the motion trajectory of the robot is planned in joint space and cartesian spacerespectively. Polynomial interpolation is used to plan the joint velocity in the process of motion, thebending trajectory in the environment without obstacles is planned by the combination of piecewisefunction and sine function, and the obstacle avoidance trajectory in the environment with obstaclesis planned by the rapidly-exploring random tree algorithm based on an improved artificial potential field method. Through the mathematical model and the application of Matlab software to verify theabove algorithm for robot bending processing motion feasibility.
Finally, the Internet of Things technology and Python development technology are used tocombine various terminals with a five-degree-of-freedom manipulator through a web server torealize the remote control of robots based on the Internet of Things and verification throughexperiments.
Key words: Five-DOF robot, Motion control, Trajectory planning, Networked remotecontrol
目錄
第一章 緒論
1.1 背景及意義
1.1.1 工業(yè)折彎機器人研究背景
20 世紀 70 年代初,工業(yè)機器人在我國開(kāi)始使用和發(fā)展,"七五"期間,進(jìn)行了針對工業(yè)機器人的基礎技術(shù)和部件的研究[1],完成了關(guān)于再生產(chǎn)工業(yè)機器人的基礎技術(shù),其中包括了機器人的結構設計、驅動(dòng)單元、控制系統、測試系統、小批量生產(chǎn)技術(shù)等。到 20 世紀 80 年代,為了跟蹤國外工業(yè)機器人的先進(jìn)技術(shù),智能機器人的研究和開(kāi)發(fā)被安排在國家"高技術(shù)研究發(fā)展計劃"中[2],并對智能控制算法、機器視覺(jué)和高性能傳感器等多方面開(kāi)展了研究,且取得了一定的成就[3].90 年代初,我國開(kāi)發(fā)了用于噴涂、焊接、搬運、裝配等方面的機器人。同時(shí),視覺(jué)、力感應和其他傳感器技術(shù)還得到了相關(guān)高科技項目的支持,并開(kāi)始研發(fā)應用工程。至 90 年代中期,焊接機器人被選做為研發(fā)的重點(diǎn),以便快速掌握焊接機器人關(guān)鍵技術(shù)。90 年代后半期,工業(yè)機器人生產(chǎn)技術(shù)不斷提升,逐步實(shí)現了國產(chǎn)機器人的商業(yè)化。近幾年,中國的工業(yè)機器人出貨量一直處在高速增長(cháng)階段,這里不僅有"智能制造 2025"的政策影響,亦有我國工業(yè)制造大國的需求驅動(dòng)。數據顯示,近 5 年我國機器人市場(chǎng)平均增長(cháng)率接近 30%[4],自 2013 年開(kāi)始,我國成為全球最大的機器人市場(chǎng),連續六年居全球首位,我國機器人市場(chǎng)未來(lái)前景可期。
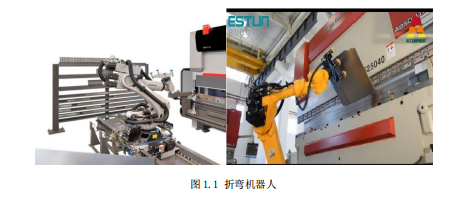
在機械加工技術(shù)中,折彎技術(shù)占據著(zhù)不可或缺的重要性。隨著(zhù)制造業(yè)智能化和自動(dòng)化程度的不斷提高,人們對折彎加工的效率及質(zhì)量要求也越來(lái)越高。在目前工業(yè)生產(chǎn)中,鈑金件的折彎加工主要還依賴(lài)人工配合折彎機進(jìn)行折彎操作[5].而在鈑金件的折彎過(guò)程中,人工配合折彎機進(jìn)行折彎操作,不僅耗費時(shí)力、效率較低,而且工件質(zhì)量受工人的操作熟練程度影響;惡劣的工作環(huán)境和高強度的勞動(dòng)同時(shí)也在危害著(zhù)工人的健康。隨著(zhù)折彎技術(shù)的不斷改進(jìn)以及人工勞動(dòng)成本的增加,為了提高企業(yè)的競爭力,一些企業(yè)開(kāi)始將工業(yè)機器人引入到折彎加工過(guò)程中,機器人輔助自動(dòng)化折彎成為行業(yè)發(fā)展的熱門(mén)趨勢,如圖 1.1 所示。
折彎機器人是工業(yè)高速發(fā)展下的產(chǎn)物,同碼垛機器人、搬運機器人一樣,很大程度上幫助提高工廠(chǎng)的生產(chǎn)效率。機器人作為自動(dòng)化生產(chǎn)流水線(xiàn)上不可或缺的生產(chǎn)設備,其發(fā)展水平已成為衡量一個(gè)國家科技水平的重要評估標準[6].工業(yè)機器人發(fā)展的方向正朝著(zhù)具有人機交互、安全和智能化的方向發(fā)展。工業(yè)機器人在中國的發(fā)展起步雖說(shuō)較晚,但是同時(shí)也擁有著(zhù)巨大發(fā)展潛力,比如新松機器人自動(dòng)化股份有限公司、安徽埃夫特智能裝備有限公司、哈爾濱博實(shí)自動(dòng)化股份有限公司。國外一批頗具影響力和知名度的機器人公司,如美國的 AmericanRobot,ST 機器人公司,跨國集團 ABB,日本的 FANUC,英國的 Auto Tech Robot,德國的KUKA Roboter,Trumpf,加拿大的 Jcd International Robotics,以色列的 Robogp Tek 公司等,它們都已成為各自國家機器人產(chǎn)業(yè)的引領(lǐng)者,不斷推進(jìn)機器人的深化研究,更新機器人的應用技術(shù),促進(jìn)機器人產(chǎn)業(yè)的發(fā)展,讓工業(yè)機器人越來(lái)越智能化、實(shí)用化。
1.1.2 工業(yè)折彎機器人研究意義
機器人技術(shù)是一個(gè)國家技術(shù)和工業(yè)自動(dòng)化的重要標志和體現[7].隨著(zhù)自動(dòng)化產(chǎn)業(yè)的廣泛應用和智能時(shí)代的到來(lái),機器人技術(shù)可以應用在工業(yè)生產(chǎn)、居民生活的方方面面。它不只提高了產(chǎn)品的質(zhì)量、生產(chǎn)效率,降低了成本,同時(shí)也幫助人們避免了很多危險的情況,如救援、排爆、空間站艙外狀態(tài)檢測等。目前,從應用領(lǐng)域來(lái)看,工業(yè)機器人覆蓋面非常之廣,除了汽車(chē)及汽車(chē)零部件制造、鈑金加工和機械加工等領(lǐng)域,隨著(zhù) 3C 電子、物流等行業(yè)的發(fā)展和需求的增長(cháng),工業(yè)機器人也逐步滲透到這些新興領(lǐng)域。
隨著(zhù)工業(yè)技術(shù)的不斷革新,鈑金件折彎已成為工業(yè)機器人發(fā)展金屬加工的重要領(lǐng)域。折彎機器人的工作原理是,當數控折彎機在進(jìn)行工作之時(shí),用折彎機器人(或機械臂)配合折彎機進(jìn)行折彎。與以往的人工配合折彎機工作相比,采用折彎機器人配合折彎機進(jìn)行折彎工藝操作具有以下幾種優(yōu)點(diǎn):
(1)加工效率高,折彎機器人可以連續地進(jìn)行工作,進(jìn)而減少工人的工作量。尤其是對于大型板材的折彎,想要完成折彎工藝流程常常還需要很多工人的配合,因而折彎機器人可提高工作效率,一定程度上縮短加工時(shí)間。
(2)產(chǎn)品加工合格率高,折彎機器相比人工具有定位精確、重復定位精度更高等優(yōu)點(diǎn)。
傳統人工配合折彎機進(jìn)行折彎作業(yè)是需要工人使用雙手托舉鈑金件做折彎跟隨運動(dòng),產(chǎn)品質(zhì)量受工人影響因素較大,產(chǎn)品質(zhì)量不均一。
(3)加工安全性強,折彎機器人與折彎機相互配合的工作機制,可以替代傳統的工人與折彎機相互配合的工作機制,可以一定程度上避免工人在加工過(guò)程中受傷,從而提高了工作中的安全性。
(4)減少生產(chǎn)成本,降低工廠(chǎng)負荷。在鈑金件折彎加工過(guò)程中,通常需要大量的人力物力財力去完成這項工作,但是一臺折彎機器人就可以替代多名勞動(dòng)工人,這樣不僅降低了企業(yè)成本,同時(shí)也提高了工作效率,解決操作人員工作量大等系列問(wèn)題,且機器人更新?lián)Q代周期緩慢,可通過(guò)修改程序以適應不同工件的生產(chǎn),降低相應的設備投資,實(shí)現勞力轉換,邁入"無(wú)人化"生產(chǎn)加工時(shí)代。
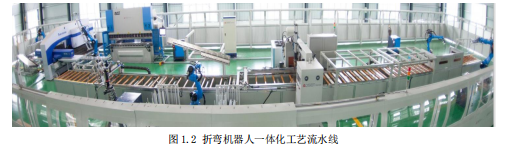
目前的鈑金加工單元主要由折彎機械臂進(jìn)行上料下料、數控折彎機進(jìn)行折彎以及一些輔助設備進(jìn)行輔助,這種分離式的加工方式存在可靠性不高、控制協(xié)調復雜等問(wèn)題,不能滿(mǎn)足現代工業(yè)智能化一體化的需要。所以未來(lái)折彎機器人和數控折彎機以及相關(guān)輔助設備的一體化是一大發(fā)展趨勢,而控制系統的一體化、遠程化又是另一大趨勢,如圖 1.2 所示。
在能夠完成各種復雜鈑金工藝,不斷提高效率,增加功能的同時(shí),簡(jiǎn)化控制復雜度是折彎機器人未來(lái)的發(fā)展目標。且如今正值物聯(lián)網(wǎng)技術(shù)革命的興起,為滿(mǎn)足高速、自動(dòng)化、個(gè)性化生產(chǎn)的需要,人們設想通過(guò)互聯(lián)網(wǎng)將機器人與上位機連接起來(lái),實(shí)現遠程控制,為進(jìn)一步挖掘機器人產(chǎn)業(yè)的潛在價(jià)值提供了重要途徑。同時(shí),設備的狀態(tài)監測也是工業(yè) 4.0 的重要內容之一[8].該技術(shù)旨在通過(guò)機器人電機控制器及其外圍設備和上位機之間建立通信網(wǎng)絡(luò ),以實(shí)現上位機對機器人的遠程通信,滿(mǎn)足機器人在復雜環(huán)境中的需求,從而形成遠程控制系統,如圖 1.3 所示。網(wǎng)絡(luò )化遠程控制具有如下優(yōu)點(diǎn):
(1)提高生產(chǎn)力。網(wǎng)絡(luò )遠程控制能夠對工廠(chǎng)所有的生產(chǎn)機械進(jìn)行有效的統籌調度,提高設備之間的聯(lián)合制造的生產(chǎn)力。
(2)提高安全性。網(wǎng)絡(luò )遠程控制能夠對所有的終端進(jìn)行有效的監控,在出現問(wèn)題時(shí)及時(shí)報告,提高安全性。
(3)延伸工作空間。工程師和研究人員不用親臨現場(chǎng)就能遠程查看工廠(chǎng)的生產(chǎn)情況,方便對機械進(jìn)行改進(jìn),對生產(chǎn)情況進(jìn)行研究等。

1.2 工業(yè)機器人路徑規劃算法的國內外研究現狀
對機器人路徑規劃的研究始于 20 世紀 70 年代,機器人路徑規劃目的是在使用規劃算法的條件下,能夠在有障礙物的工作空間內,設計出一條從起點(diǎn)到終點(diǎn)的無(wú)碰撞路徑[9].在此基礎上,通過(guò)單個(gè)或多個(gè)條件相結合(如行程最短,運行時(shí)間最少,耗能最優(yōu)等)為機器人提供一條最佳的規劃路徑[10].機器人路徑規劃始終作為機器人領(lǐng)域和自動(dòng)化領(lǐng)域的熱點(diǎn)問(wèn)題,其不僅要保證無(wú)碰撞路徑和最小的移動(dòng)距離,而且還要在充滿(mǎn)障礙物的環(huán)境中提供從初始位置到目標位置的平滑可行路徑。為此國內外學(xué)者對機器人路徑規劃問(wèn)題做了大量研究,且提出了多種方法。
國外學(xué)者 Sourya Dipta Das[11]等人針對機器人能量最優(yōu)路徑規劃問(wèn)題,提出一種基于差分進(jìn)化算法的節能路徑規劃方法,設計一個(gè)合適的代價(jià)函數來(lái)跟蹤機器人手臂關(guān)節初始和最終配置之間的最優(yōu)路徑,可應用于多障礙物工作空間中的工業(yè)機器人手臂;Tse-Ching Lai[12]等人考慮到機器人末端執行器與障礙物之間的安全距離以避免碰撞,進(jìn)而提出一種基于非均勻有理 B 樣條曲線(xiàn)的機械臂避障新方法。采用 B 樣條曲線(xiàn)擬合的方法尋找具有 B 樣條曲線(xiàn)特性的軌跡控制點(diǎn),通過(guò)檢測障礙物距離來(lái)修正路徑,從而生成一條更安全的路徑;KwangjinYang[13]等人對雜亂的環(huán)境中進(jìn)行不同限制條件下的規劃進(jìn)行研究,將障礙物和機器人的微分約束都考慮在內,針對差分約束的移動(dòng)機器人提出一種基于樣條的快速搜索隨機樹(shù)的機器人路徑規劃方法,同時(shí)處理外部約束和內部約束,該方法保證了曲線(xiàn)的連續性并滿(mǎn)足上限曲率約束;Tatsushi Nishi 和 Yuki Mori[14]將無(wú)約束運動(dòng)規劃問(wèn)題表述為一個(gè)能量消耗最小非線(xiàn)性?xún)?yōu)化問(wèn)題,提出一種基于勢場(chǎng)的運動(dòng)規劃方法,其目標是在給定機器人手臂動(dòng)力學(xué)的情況下,使能量消耗和總完成時(shí)間的加權和最小。該方法在節約能源消耗的同時(shí),優(yōu)化了工件的拾取點(diǎn),使總完成時(shí)間最小化;MarcoA.Contreras-Cruz[15]等人將人工蜂群算法與進(jìn)化規劃算法相結合,通過(guò)一組局部過(guò)程來(lái)細化可行路徑,提出一種新的基于元啟發(fā)式方法的魯棒算法來(lái)生成由前進(jìn)和旋轉組成的路徑。與經(jīng)典的概率路線(xiàn)圖方法經(jīng)過(guò)定量和定性分析,能有效的規劃路徑長(cháng)度、平穩性、計算時(shí)間和成功率;P.K. Das[16]等人討論了關(guān)于多機器人的軌跡路徑規劃問(wèn)題,基于四種基本原理,提出一種基于粒子群算法和差分攝動(dòng)速度算法混合改進(jìn)的經(jīng)典 Q學(xué)習算法,來(lái)確定雜亂環(huán)境下多機器人的路徑優(yōu)化軌跡算法以提高收斂性。通過(guò)修改參數和微分擾動(dòng)速度,提高收斂速度和整體性能指標;Hyun Woo Kim[17]等人考慮到機械臂末端執行器的靈活性或機械臂本身的最大移動(dòng)方向,提出一種基于逆向運動(dòng)學(xué)和末端執行器最大運動(dòng)方向的路徑規劃算法。加入奇異值分解法來(lái)優(yōu)化可操作度測量,使用單位方向向量來(lái)修正末端執行器的正方向,使其能移動(dòng)到目標位置。通過(guò)仿真和實(shí)驗驗證了該算法的可行性,但此方法可能不適用于閉環(huán)運動(dòng)學(xué)。
國內學(xué)者季夢(mèng)玉、王蜀泉[18]等人使用近似區域而不是精確的測量來(lái)定義機械臂的狀態(tài)空間和關(guān)節動(dòng)作,提出了一種基于 Q 學(xué)習的機器人手臂路徑規劃方法,并加入獎勵函數用于考慮機器人末端執行器當前位置到目標位置的距離。實(shí)驗結果表明,Q 學(xué)習方法能夠有效地規劃機器人手臂的無(wú)碰撞路徑;莊麗、馬宏斌[19]等人提出了一種用于雙臂機器人路徑規劃的變步長(cháng)樹(shù)干快速搜索隨機樹(shù)(VT-RRT)算法。通過(guò)對 RRT 算法中隨機節點(diǎn)搜索空間的變換,根據目標位置自適應調整步長(cháng),仿真結果表明,新的改進(jìn)算法與基本的快速搜索隨機樹(shù)算法相比,可以有效地提高搜索效率,減少迭代步長(cháng),縮短路徑規劃時(shí)間,同時(shí)提高魯棒性;于建均[20]等人為了簡(jiǎn)化復雜的機械臂運動(dòng)規劃,提高機械臂的智能化,提出了一種基于遞歸神經(jīng)網(wǎng)絡(luò )的機械臂任務(wù)仿真系統,利用遞歸神經(jīng)網(wǎng)絡(luò )對原始數據進(jìn)行訓練,得到任務(wù)軌跡與機器人手臂關(guān)節角度之間的映射仿真策略。實(shí)驗結果表明,該仿真系統不僅可以簡(jiǎn)化復雜的運動(dòng)規劃,再現原任務(wù)的演示,而且可以在任務(wù)變化時(shí)通過(guò)策略泛化實(shí)現新任務(wù)的仿真;韓興國、殷鳴[21]等人利用動(dòng)態(tài)模糊神經(jīng)網(wǎng)絡(luò )求解機器人的逆運動(dòng)學(xué),在一定程度上提高了求解效率,并運用模型對 KR16-2 機器人進(jìn)行復雜運動(dòng)軌跡仿真,證明了該方法的求解精度和效率問(wèn)題;鄭晶怡[22]等人考慮到手臂在狹窄空間中進(jìn)行操作這一問(wèn)題,尤其是對于有多個(gè)連桿的機械臂。為了避免碰撞,提出一種面向目標的隨機搜索的路徑規劃算法,規劃出一條平滑且相對穩定的路徑,該算法既考慮了環(huán)境中的障礙物,又考慮了運動(dòng)學(xué)及動(dòng)力學(xué)的內部約束,保證了曲率的連續性,但對末端執行器設置了一定的方向約束;李俊、舒志兵[23]等人提出了一種改進(jìn)的樣條插值方法,結合了樣條函數和遺傳算法,解決了路徑規劃問(wèn)題中復雜工作量和不能柔性運作等問(wèn)題。它可以簡(jiǎn)化方便地減少計劃量和計算量,同時(shí)也可以應用于各種類(lèi)型的機器人;由于機器人軌跡規劃中關(guān)節之間復雜的非線(xiàn)性約束,王凱凱和萬(wàn)衡[24]等人在關(guān)節空間中采用改進(jìn)的五次多項式插值方法使關(guān)節在約束條件下平滑移動(dòng),運用三次 B 樣條插值對多項式插值進(jìn)行排序,并通過(guò)結合高周期解決了一些實(shí)際的工程規劃問(wèn)題;陶重犇[25]等人通過(guò)采用柵格法建立搬運機器人的工作環(huán)境模型,并將改進(jìn)的貪心算法與遺傳算法相結合,改變了柵格系數和模擬退火系數的傳統定義,并針對貪心算法中一直難以解決的局部收斂問(wèn)題,而提出了改進(jìn)的模擬退火算法;孫煒[26]等人提出了一種針對全局路徑規劃問(wèn)題改進(jìn)的 A*算法,針對 A*算法規劃路徑產(chǎn)生的冗余點(diǎn)、路徑長(cháng)度和轉折角度較大等問(wèn)題,提出將 A*算法規劃出的路徑按較小的分割步長(cháng)進(jìn)行劃分,以此獲得一系列的路徑節點(diǎn),結果表明,該算法能有效地減小路徑長(cháng)度和轉折角度;程志[27]等人提出了一種改進(jìn)的人工勢場(chǎng)法,將機器人前進(jìn)的方向向量、對斥力的生成和計算機制進(jìn)行了調整以解決其處于局部最小點(diǎn)情況下無(wú)法繼續規劃路徑的問(wèn)題;繆新[28]研究了機器人磨削自動(dòng)化控制技術(shù),對力/位混合控制技術(shù)及最優(yōu)軌跡規劃方法進(jìn)行了著(zhù)重研究。
1.3 工業(yè)機器人網(wǎng)絡(luò )化遠程控制國內外研究現狀
隨著(zhù)當下計算機技術(shù)和網(wǎng)絡(luò )技術(shù)的高速發(fā)展,有效地促進(jìn)了機器人遠程控制技術(shù)的創(chuàng )新。
目前,在已知環(huán)境下,通過(guò)某些技術(shù)(如視覺(jué)技術(shù)、磁道導航等),能夠讓機器人在一定程度上實(shí)現自主控制。而在一些復雜的環(huán)境與艱巨的任務(wù)作業(yè)中,為減少一些潛在危害的發(fā)生,就必須對機器人采用遠程控制。因此,對工業(yè)機器人在安全可靠和即時(shí)的控制這兩方面提出了非常高的要求[29].
國外學(xué)者 Viktor N. Sheludko[30]等人提出了一種基于技術(shù)視覺(jué)的群協(xié)作機器人分散控制系統,該系統通過(guò)遠程工作站接收信號進(jìn)而控制機器人移動(dòng),可以通過(guò)互聯(lián)網(wǎng)實(shí)時(shí)跟蹤機器人的軌跡。且服務(wù)器可為多個(gè)用戶(hù)提供遠程訪(fǎng)問(wèn)權限,并可接收多臺計算機的控制動(dòng)作;PutovA.V. [31]等人將基于客戶(hù)機-服務(wù)器模型和數據傳輸協(xié)議加入機器人定位和控制系統中,允許通過(guò)本地網(wǎng)絡(luò )或因特網(wǎng)實(shí)現對機器人的控制操作;Teodorescu R M[32]等人利用 XBEE 無(wú)線(xiàn)通信技術(shù)實(shí)現移動(dòng)平臺與遠程控制設備之間的雙向通信,XBee 無(wú)線(xiàn)模塊一般應用于工業(yè)、科學(xué)和醫學(xué)頻段(2.4GHz 或 868MHz),通過(guò) Labview 軟件實(shí)現控制功能的開(kāi)發(fā)和運行;AdityaSundaram[33]等人采用標準協(xié)議和人機接口,使用 web 瀏覽器,使遠程用戶(hù)可以通過(guò) Internet提供的視覺(jué)反饋中控制移動(dòng)機器人在封閉空間中運動(dòng),并討論了一種基于云計算的網(wǎng)絡(luò )化機器人系統的實(shí)現和性能分析;Jan Nádvorník 和 Pavel Smutn?[34]在 Eclipse 集成開(kāi)發(fā)環(huán)境中開(kāi)發(fā)了 Android 操作系統的移動(dòng)應用程序,并使用 Lego Mindstorms 構建工具包,基于無(wú)線(xiàn)藍牙技術(shù)實(shí)現移動(dòng)機器人的手動(dòng)控制。
國內學(xué)者陳偉、李向東[35]等人搭建了一種移動(dòng)機器人遠程控制系統,該系統通過(guò)使用指令檢驗方式以及反饋控制機制,實(shí)現對機器人的可靠控制;范家璐[36]等人為了克服無(wú)線(xiàn)通信對運行性能的負面影響,創(chuàng )造性的研究了一類(lèi)工業(yè)過(guò)程中基于無(wú)線(xiàn)網(wǎng)絡(luò )的運行優(yōu)化與反饋控制。提出一種集丟包和噪聲于一體的無(wú)線(xiàn)通信模型,將無(wú)線(xiàn)傳感器網(wǎng)絡(luò )引入到雙層工業(yè)運行控制結構中,對運行層現有的以太網(wǎng)進(jìn)行補充;賀人文和劉霞[37]通過(guò)將機器人控制器與TCP/IP 協(xié)議進(jìn)行通信,其控制系統采用面向對象設計的 C#編寫(xiě)的 IRC5 控制器,實(shí)現了直接通過(guò)以太網(wǎng)的 ABB 型機器人的遠程控制;王魁生[38]等人針對移動(dòng)終端之間無(wú)法進(jìn)行遠程控制的問(wèn)題,提出了一種基于 Android 平臺的遠程控制系統。通過(guò)客戶(hù)端-服務(wù)器模型,遵循Android 應用規范,采用 Java 語(yǔ)言開(kāi)發(fā)的遠程控制平臺;周保可、丑武勝[39]等人針對當下物聯(lián)網(wǎng)結合機器人技術(shù)這一熱門(mén)趨勢,設計了基于云平臺的移動(dòng)機器人遠程控制系統。用戶(hù)可以通過(guò)運行 Android 手機應用程序實(shí)現移動(dòng)機器人的遠程運動(dòng)控制,且該系統響應速度快,性能穩定,達到了遙控要求;王賽和劉子龍[40]二人通過(guò) 4G 無(wú)線(xiàn)通信技術(shù)實(shí)現了移動(dòng)機器人的遠程監控系統,并提出后續可與 5G 模塊和 5G 手機終端相連以降低傳輸數據延遲。
1.4 論文研究?jì)热菁皠?chuàng )新點(diǎn)
本文首先就目前國內外存在的工業(yè)機器人與折彎機相配合的方式方法,進(jìn)行了大量的調研和分析,針對一些機器人工作中所存在的配合效率低、自由度不高、實(shí)用性不強等問(wèn)題,設計出五自由度直角坐標機器人。其次,對所設計出的五自由度直角坐標機器人搭建軟硬件平臺。并對機器人的折彎運動(dòng)過(guò)程的路徑進(jìn)行算法規劃分析和仿真。最后,通過(guò)物聯(lián)網(wǎng)技術(shù)搭建網(wǎng)絡(luò )化遠程控制平臺,為以后的實(shí)驗驗證提供基礎。本文具體研究?jì)热萑缦拢?/p>
(1)根據自主設計的五自由度直角坐標折彎機器人,選擇相應的伺服電機、伺服電機驅動(dòng)器、運動(dòng)控制卡和工業(yè)主機,闡述控制系統的設計結構,并完成硬件平臺和電氣控制柜的搭建。根據所選的伺服電機和運動(dòng)控制卡,通過(guò)對應的軟件,分別完成對伺服電機和運動(dòng)控制卡的調試,實(shí)現通過(guò)運動(dòng)控制卡完成對伺服電機的運動(dòng)控制。
(2)分析國內外機器人路徑規劃和折彎隨動(dòng)的相關(guān)技術(shù),針對實(shí)驗室自主設計的五自由度直角坐標折彎機器人建立坐標系,根據 D-H 參數法對其進(jìn)行運動(dòng)學(xué)分析,之后對機器人折彎操作建立數學(xué)模型,并編寫(xiě)折彎隨動(dòng)程序。
(3)對機器人運動(dòng)軌跡在關(guān)節空間和笛卡爾空間中分別進(jìn)行運動(dòng)規劃。應用多項式插補規劃運動(dòng)過(guò)程中的關(guān)節速度,應用分段函數組合正弦函數規劃機械臂跟隨鈑金件進(jìn)行折彎工藝的折彎軌跡,應用基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)法規劃在有障礙物環(huán)境中的避障軌跡。
通過(guò)數學(xué)模型并應用 Matlab 軟件來(lái)驗證上述算法對機器人進(jìn)行折彎加工運動(dòng)的可行性。
(4)為實(shí)現對機器人位置坐標、機器人運行速度的實(shí)時(shí)顯示,實(shí)現對機器人的點(diǎn)動(dòng)運動(dòng)、定長(cháng)運動(dòng)、點(diǎn)位示教運動(dòng)的實(shí)時(shí)控制,以及對機器人運行過(guò)程中的報警信息、設備開(kāi)機率、設備運行時(shí)長(cháng)等進(jìn)行統計分析,采用 B/S 架構,基于 python 語(yǔ)言和 Mysql 數據庫進(jìn)行開(kāi)發(fā),采用 TCP/IP 通訊協(xié)議實(shí)現和機器人的數據交互,進(jìn)而實(shí)現五自由度機器人遠程控制系統的搭建。
本文的主要創(chuàng )新工作有以下幾部分:
(1)針對鈑金件折彎工藝的技術(shù)現狀,對實(shí)驗室已有的五自由度直角坐標折彎機器人的路徑規劃進(jìn)行研究。針對折彎機器人的折彎隨動(dòng)工藝流程,利用分段函數組合正弦函數規劃機械臂跟隨鈑金件進(jìn)行折彎工藝的折彎軌跡,運用基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)算法對障礙物環(huán)境中的避障軌跡進(jìn)行運動(dòng)規劃和仿真,且應用于鈑金件的實(shí)際折彎操作。
(2)設計機械臂網(wǎng)絡(luò )化遠程控制系統,實(shí)現遠程客戶(hù)端與服務(wù)器的數據交互和控制操作。
1.5 論文總體結構
第一章,首先闡述工業(yè)機器人在工業(yè)生產(chǎn)領(lǐng)域的價(jià)值和意義,針對工業(yè)機器人目前的技術(shù)現狀,如軌跡規劃和遠程控制等展開(kāi)綜述,對其在鈑金件折彎領(lǐng)域的國內外現狀進(jìn)行詳細的探討。
第二章,詳細闡述了自主設計的五自由度直角坐標折彎機器人的機械結構及各項參數,選擇相應的伺服電機、伺服電機驅動(dòng)器、運動(dòng)控制卡,闡述控制系統的設計結構,并完成硬件平臺和電氣控制柜的搭建。根據所選的伺服電機和運動(dòng)控制卡,通過(guò)對應的軟件,分別完成對伺服電機和運動(dòng)控制卡的調試。并在運動(dòng)控制卡軟件中編寫(xiě)模塊化程序,實(shí)現通過(guò)運動(dòng)控制卡完成對伺服電機的運動(dòng)控制。
第三章,針對鈑金件折彎工藝的技術(shù)現狀,并結合工業(yè)機器人的運動(dòng)特性,對實(shí)驗室已有的五自由度直角坐標折彎機器人的路徑規劃進(jìn)行研究,根據 D-H 參數法建立機器人坐標系,求解機器人運動(dòng)學(xué)方程,再根據運動(dòng)方程編寫(xiě)程序實(shí)現其自動(dòng)折彎操作。
第四章,運用插補法和基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)算法分別對所建立的數學(xué)模型進(jìn)行軌跡規劃和仿真,并將其應用于鈑金件的實(shí)際折彎操作。
第五章,為實(shí)現對機器人位置坐標、機器人運行速度的實(shí)時(shí)顯示,實(shí)現對機器人的點(diǎn)動(dòng)運動(dòng)、定長(cháng)運動(dòng)、點(diǎn)位示教運動(dòng)的實(shí)時(shí)控制,以及對機器人運行過(guò)程中的報警信息、設備開(kāi)機率、設備運行時(shí)長(cháng)等進(jìn)行統計分析,采用 B/S 架構,基于 python 語(yǔ)言和 Mysql 數據庫進(jìn)行開(kāi)發(fā),采用 TCP/IP 通訊協(xié)議實(shí)現和機器人的數據交互,進(jìn)而實(shí)現五自由度機器人遠程控制系統的搭建。
第六章,對全文所完成的研究工作進(jìn)行歸納與總結,并對未來(lái)五自由度直角坐標機器人的后續研究工作做了進(jìn)一步的展望。
第二章 五自由度機械臂控制系統總體設計
2.1 引言
2.2 五自由度機械臂總體結構介紹
2.3 五自由度機械臂控制系統硬件選型
2.4 控制系統方案設計
2.5 控制系統軟件調試
2.5.1 電機與伺服驅動(dòng)器調試
2.5.2 運動(dòng)控制卡的軟件程序編寫(xiě)
2.6 本章小結
第三章 五自由度機械臂運動(dòng)學(xué)分析及程序設計
3.1 引言
3.2 五自由度機械臂運動(dòng)學(xué)分析
3.2.1 五自由度機械臂坐標系的建立
3.2.2 五自由度機械臂運動(dòng)學(xué)求解
3.3 五自由度機械臂折彎運動(dòng)學(xué)方程
3.4 五自由度機械臂折彎隨動(dòng)程序設計
3.4.1 折彎隨動(dòng)設計框架
3.4.2 程序編寫(xiě)
3.5 本章小結
第四章 五自由度機械臂運動(dòng)軌跡規劃算法及仿真
4.1 引言
4.2 基于插補法的運動(dòng)規劃
4.2.1 關(guān)節空間插補運動(dòng)規劃
4.2.2 笛卡爾空間插補運動(dòng)規劃
4.3 基于分段函數組合正弦函數法運動(dòng)規劃
4.4 基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)法軌跡規劃
4.4.1 人工勢場(chǎng)法
4.4.2 隨機樹(shù)算法
4.4.3 基于隨機樹(shù)思想改進(jìn)的人工勢場(chǎng)法
4.5 本章小結
第五章 五自由度機械臂遠程控制系統設計
5.1 引言
5.2 網(wǎng)絡(luò )化遠程監控系統
5.3 瀏覽端/服務(wù)器模式
5.4 遠程控制系統軟件的實(shí)現
5.4.1 軟件功能說(shuō)明
5.4.2 系統安全保護措施
5.5 五自由度機械臂遠程控制系統實(shí)驗
5.6 本章小結
第六章 總結與展望
6.1 本文總結
機器人以其高效、高精度的性能在工業(yè)制造中得到了廣泛應用。在生產(chǎn)線(xiàn)的制造階段,最有趣的問(wèn)題之一是如何將這些機器人所消耗的能量降到最低。以及機器人的工業(yè)化或智能化改造,不會(huì )因工人疲勞等因素而影響到流水線(xiàn)的質(zhì)量,可以顯著(zhù)的提高企業(yè)產(chǎn)品的質(zhì)量、產(chǎn)品良率,還有整體工作效率。本文首先對機器人折彎路徑規劃進(jìn)行研究,通過(guò)建立五自由度直角坐標折彎機器人連桿坐標系,得到 D-H 參數并進(jìn)行運動(dòng)學(xué)分析,進(jìn)而對機器人折彎路徑進(jìn)行規劃和仿真,驗證機器人進(jìn)行折彎加工的可行性。并根據機器人運動(dòng)指令進(jìn)行自動(dòng)編程研究。其次,搭建五自由度直角坐標折彎機器人硬件平臺,包括伺服電機、伺服驅動(dòng)器、運動(dòng)控制卡、電氣控制柜的選型、組裝與搭建。再次,針對五自由度直角坐標折彎機器人所用到的伺服驅動(dòng)器和運動(dòng)控制卡,進(jìn)行軟件調試與系統控制程序的編寫(xiě)。最后,使用物聯(lián)網(wǎng)技術(shù)和 Python 開(kāi)發(fā)技術(shù)通過(guò)網(wǎng)絡(luò )服務(wù)器將各類(lèi)終端與五自由度機械臂進(jìn)行結合,將機械臂控制端擴展到工業(yè)主機,甚至是我們基本上人手一部的手機上,實(shí)現基于物聯(lián)網(wǎng)的機器人遠程控制系統。
本文主要完成了以下研究工作:
(1)分析國內外機器人路徑規劃和折彎隨動(dòng)的相關(guān)技術(shù),針對實(shí)驗室自主設計的五自由度直角坐標折彎機器人,實(shí)現其自動(dòng)規劃路徑。
(2)根據自主設計的五自由度直角坐標折彎機器人的各項參數,選擇相應的伺服電機、伺服電機驅動(dòng)器、運動(dòng)控制卡和工業(yè)主機,并完成硬件平臺和電氣控制柜的搭建。
(3)根據所選的伺服電機和運動(dòng)控制卡,通過(guò)對應的軟件,分別完成對伺服電機和運動(dòng)控制卡的調試,實(shí)現通過(guò)運動(dòng)控制卡完成對伺服電機的運動(dòng)控制(4)為實(shí)現對機器人位置坐標、機器人運行速度的實(shí)時(shí)顯示,實(shí)現對機器人的點(diǎn)動(dòng)運動(dòng)、定長(cháng)運動(dòng)、點(diǎn)位示教運動(dòng)的實(shí)時(shí)控制,以及對機器人運行過(guò)程中的報警信息、設備開(kāi)機率、設備運行時(shí)長(cháng)等進(jìn)行統計分析,采用 B/S 架構,基于 python 語(yǔ)言和 Mysql 數據庫進(jìn)行開(kāi)發(fā),采用 TCP/IP 通訊協(xié)議實(shí)現和機器人的數據交互,進(jìn)而實(shí)現五自由度機器人遠程控制系統的搭建。
6.2 展望
一般情況下,工業(yè)發(fā)展先經(jīng)歷自動(dòng)化然后再到智能化,目前我國大部分制造公司還處在自動(dòng)化過(guò)程中,智能化偏少,整個(gè)智能化市場(chǎng)其實(shí)仍然處在探索嘗試的階段。且目前隨著(zhù)大數據、機器視覺(jué)等技術(shù)的發(fā)展,工廠(chǎng)中包括機械臂在內的常見(jiàn)工業(yè)機器人在作業(yè)時(shí)展現出的"柔韌度"和"靈活性"都有了顯著(zhù)的提高。本文雖然對五自由度直角坐標折彎機器人配合折彎機進(jìn)行折彎工作中的運動(dòng)規劃和遠程控制進(jìn)行了研究與實(shí)驗,但仍然存在著(zhù)不足,還可以在以下幾個(gè)方面進(jìn)一步改善:
(1)對五自由度直角坐標折彎機器人的自動(dòng)編程技術(shù)進(jìn)行的研究還不夠完善。目前,各行業(yè)針對非標準件和小批量工件的加工需求日益增長(cháng),折彎工藝的更加智能化、集成化,要求控制平臺具備圖形化編程的能力。后續工作會(huì )在原有手動(dòng)示教的基礎上,通過(guò)圖形化軟件實(shí)現自動(dòng)編程,可以更加方便、快捷的進(jìn)行折彎操作。
(2)加入五自由度直角坐標折彎機器人的視覺(jué)定位技術(shù)。利用視覺(jué)定位技術(shù)提高五自由度直角坐標折彎機器人機器人自動(dòng)避障,可以提高五自由度直角坐標折彎機器人工作效率以及重復定位精度,以及可以通過(guò)機器人視覺(jué),在遠程控制中及時(shí)發(fā)現生產(chǎn)加工中所遇到的突發(fā)狀況。
(3)五自由度直角坐標折彎機器人尚未與折彎機進(jìn)行協(xié)同加工實(shí)驗,后續工作可驗證其協(xié)同加工方案的可行性。
參考文獻
[1] 張毅。 工業(yè)機器人的技術(shù)發(fā)展及其應用[J]. 數字化用戶(hù), 2017(28): 45-46.
[2] 樸圣艮。 工業(yè)機器人的應用現狀及發(fā)展[J]. 農家參謀, 2019(23): 137.
[3] Iqbal J, Islam R U, Abbas S Z, et al. Automating industrial tasks through mechatronic systems-A review ofrobotics in industrial perspective[J]. Tehni?ki vjesnik, 2016, 23(3): 917-924.
[4] 杜壯。 工業(yè)機器人"消費降級"?一個(gè)偽命題[J].中國戰略新興產(chǎn)業(yè), 2018(37): 50-52.
[5] Lin H I, Carvajal D H. Automatic following in a sheet metal bending process[C]//2016 InternationalAutomatic Control Conference (CACS)。 IEEE, 2016: 137-142.
[6] Robla-Gómez S, Becerra V M, Llata J R, et al. Working together: A review on safe human-robotcollaboration in industrial environments[J]. IEEE Access, 2017, 5(26): 754-773.
[7] Vogel C, Fritzsche M, Elkmann N. Safe human-robot cooperation with high-payload robots in industrialapplications[C]//2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI)。 IEEE,2016: 529-530.
[8] Olaya S S P, Wollschlaeger M. Control as an industrie 4.0 component: Network-adaptive applications forcontrol[C]//2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation(ETFA)。 IEEE, 2017: 1-4.
[9] Jiang S, Fang H, He K, et al. Research on Obstacle Avoidance Path Planning Algorithm for Six-axisRobot[C]//2018 IEEE International Conference on Information and Automation (ICIA)。 IEEE, 2018:465-469.
[10] Shao J, Luo D, Xu Y, et al. Cooperative Path Planning for Multiple Robots With Motion Constraints inObstacle-Strewn Environment[J]. IEEE Access, 2019, 7(132): 286-301.
[11] Das S D, Bain V, Rakshit P. Energy Optimized Robot Arm Path Planning using Differential Evolution inDynamic Environment[C]//2018 Second International Conference on Intelligent Computing and ControlSystems (ICICCS)。 IEEE, 2018: 1267-1272.
[12] Lai T C, Xiao S R, Aoyama H, et al. Path planning and obstacle avoidance approaches for robotarm[C]//2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE)。IEEE, 2017: 334-337.
[13] Yang K, Moon S, Yoo S, et al. Spline-based RRT path planner for non-holonomic robots[J]. Journal ofIntelligent & Robotic Systems, 2014, 73(1): 763-782.
[14] Nishi T, Mori Y. Energy Efficient Motion Planning of Dual-Armed Robots with Pickup PointDetermination for Transportation Tasks[C]//2018 IEEE International Conference on Industrial Engineeringand Engineering Management (IEEM)。 IEEE, 2018: 1401-1405.
[15] Contreras-Cruz M A, Ayala-Ramirez V, Hernandez-Belmonte U H. Mobile robot path planning usingartificial bee colony and evolutionary programming[J]. Applied Soft Computing, 2015, 30: 319-328.https://doi.org/10.1016/j.asoc.2015.01.067. [16] Das P K, Behera H S, Panigrahi B K. Intelligent-based multi-robot path planning inspired by improvedclassical Q-learning and improved particle swarm optimization with perturbed velocity[J]. EngineeringScience and Technology, an International Journal, 2016, 19(1): 651-669.
[17] Kim H W , Chen H , Lee J M . Path planning of 5-DOF manipulator[C]// 2014 IEEE/ASME InternationalConference on Advanced Intelligent Mechatronics (AIM)。 IEEE, 2014, 877-881.
[18] Ji M, Zhang L, Wang S. A Path Planning Approach Based on Q-learning for Robot Arm[C]//2019 3rdInternational Conference on Robotics and Automation Sciences (ICRAS)。 IEEE, 2019: 15-19.
[19] Li Z, Ma H, Zhang X, et al. Path planning of the dual-arm robot based on VT-RRT algorithm[C]//2019Chinese Control Conference (CCC)。 IEEE, 2019: 4359-4364.
[20] Yu J, Wu P, Yu N, et al. Research and implementation of robot arm task imitation system based onRNN[C]//2017 IEEE International Conference on Robotics and Biomimetics (ROBIO)。 IEEE, 2017:
2484-2489.
[21] X.G.HAN, M.YIN, X.G.LIU et al. Solution of Inverse Kinematics and Motion Trajectory Simulation for 6RRobot[J]. Journal of Sichuan University(Engineering Science Edition), 2015, 47(6): 185-190.
[22] Jingyi Z, En L, Zize L. Random based narrow space path planning for arm manipulation with the fixedorientation constraints[C]//2016 Chinese Control and Decision Conference (CCDC)。 IEEE, 2016:5176-5179.
[23] 李俊, 舒志兵, 王蘇洲。 基于樣條函數和改進(jìn)遺傳算法的機器人軌跡規劃[J]. 制造技術(shù)與機床,2017(07): 91-95.
[24] 王凱凱, 萬(wàn)衡。 機器手臂軌跡規劃[J]. 制造業(yè)自動(dòng)化, 2015, 37(13): 8-11.
[25] 陶重犇, 雷祝兵, 李春光, 孫云飛, 周海冰。 基于改進(jìn)模擬退火算法的搬運機器人路徑規劃[J]. 計算機測量與控制, 2018, 26(07): 182-185.
[26] 孫煒, 呂云峰, 唐宏偉, 等。 基于一種改進(jìn)A*算法的移動(dòng)機器人路徑規劃[J]. 湖南大學(xué)學(xué)報:自然科學(xué)版, 2017, 44(4): 94-101.
[27] 程志, 張志安, 李金芝, 江濤。 改進(jìn)人工勢場(chǎng)法的移動(dòng)機器人路徑規劃[J].計算機工程與應用,2019,55(23): 29-34.
[28] 繆新。 機器人磨削系統控制技術(shù)研究[D]. 2015.
[29] Sun W, Liu C, Zhu J. A Remote Controlled Mobile Robot Based on Wireless Transmission[C]//2018 2ndIEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference(IMCEC)。 IEEE, 2018: 2173-2176.
[30] Sheludko V N, Putov V V, Putov A V, et al. Decentralized control of cooperative robotic system[C]//2016IEEE V Forum Strategic Partnership of Universities and Enterprises of Hi-Tech Branches (Science.Education. Innovations)。 IEEE, 2016: 15-18.
[31] Putov A V, Ignatev K V, Kopichev M M. Infrared camera based robot position determening and controlsystem[C]//2016 2nd International Conference on Industrial Engineering, Applications and Manufacturing(ICIEAM)。 IEEE, 2016: 1-4.
[32] Teodorescu R M, Cioc I B, Vochin B A, et al. LabVIEW application used for remote control of a mobilerobot with xbee communication[C]//2016 8th International Conference on Electronics, Computers andArtificial Intelligence (ECAI)。 IEEE, 2016: 1-4.
[33] Sundaram A, Gupta M, Rathod V, et al. Remote Surveillance Robot System--A Robust Framework UsingCloud[C]//2015 IEEE International Symposium on Nanoelectronic and Information Systems. IEEE, 2015:
213-218.
[34] Nádvorník J, Smutn? P. Remote control robot using Android mobile device[C]//Proceedings of the 201415th International Carpathian Control Conference (ICCC)。 IEEE, 2014: 373-378.
[35] 陳偉, 李向東, 劉成業(yè), 等。 基于無(wú)線(xiàn)通訊的移動(dòng)機器人遠程控制系統的設計和實(shí)現[J]. 山東科學(xué),2014, 27(6): 52-57.
[36] Fan J, Wang L, Chai T. Wireless network based operational optimization and control for a class ofindustrial processes[C]//2015 10th Asian Control Conference (ASCC)。 IEEE, 2015: 1-6.
[37] 賀文人, 劉霞。 基于A(yíng)BB機器人的遙操作控制系統設計[J]. 計算機應用研究, 2019, 36(12): 3785-3787.
[38] Wang K S, Hou Y, Xu Y Z. Design and Implementation of Remote Control System between Android Platform[C]//2016 International Conference on Information System and Artificial Intelligence (ISAI)。 IEEE,2016: 143-147.
[39] Zhou B, Chou W, Wu S. Remote control system of mobile robot based on cloud platform[C]//2017 2ndInternational Conference on Robotics and Automation Engineering (ICRAE)。 IEEE, 2017: 94-98.
[40] 王賽, 劉子龍。 基于4G網(wǎng)絡(luò )的移動(dòng)機器人遠程控制研究[J]. 軟件導刊, 2019, 18(11): 71-74.
[41] Su Y H, Hsiao C C, Young K Y. Manipulation system design for industrial robot manipulators based ontablet PC[C]//International Conference on Intelligent Robotics and Applications. Springer, Cham, 2015:27-36.
[42] Trinh G, Copplestone G, O'Connor M, et al. Robotically assembled aerospace structures: Digital materialassembly using a gantry-type assembler[C]//2017 IEEE Aerospace Conference. IEEE, 2017: 1-7.
[43] 楊中。 面向折彎作業(yè)的五自由度機械臂設計及運動(dòng)控制研究[D]. 南京郵電大學(xué), 2018.
[44] 松下電器機電(中國)有限公司。 松下AC伺服電機?驅動(dòng)器使用說(shuō)明書(shū)(綜合篇)[K]. 2018.
[45] 固高科技(深圳)有限公司。 GUS Controller 系列運動(dòng)控制器用戶(hù)手冊[K]. 2015.
[46] Ratiu M, Prichici M A. Industrial robot trajectory optimization-a review[C]//MATEC Web of Conferences.EDP Sciences, 2017, 126: 2005.
[47] Mejri S, Gagnol V, Le T P, et al. Dynamic characterization of machining robot and stability analysis[J]. TheInternational Journal of Advanced Manufacturing Technology, 2016, 82(1-4): 351-359.
[48] Patil A, Kulkarni M, Aswale A. Analysis of the inverse kinematics for 5 DOF robot arm using DHparameters[C]//2017 IEEE International Conference on Real-time Computing and Robotics (RCAR)。 IEEE,2017: 688-693.
[49] Sun J D, Cao G Z, Li W B, et al. Analytical inverse kinematic solution using the DH method for a 6-DOFrobot[C]//2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI)。 IEEE,2017: 714-716.
[50] Petrescu R V, Aversa R, Akash B, et al. Inverse kinematics at the anthropomorphic robots, by atrigonometric method[J]. American Journal of Engineering and Applied Sciences, 2017, 10(2): 394-411.
[51] Lin H I, Carvajal D H. Automatic following in a sheet metal bending process[C]//2016 InternationalAutomatic Control Conference (CACS)。 IEEE, 2016: 137-142.
[52] 陳浩。 滿(mǎn)足不同任務(wù)需求的機器人最優(yōu)路徑規劃研究及實(shí)現[D]. 浙江工業(yè)大學(xué), 2016.
[53] Ali S A, Annuar K A M, Miskon M F. Trajectory planning for exoskeleton robot by using cubic and quinticpolynomial equation[J]. International Journal of Applied Engineering Research, 2016, 11(13): 7943-7946.
[54] ?vejda M, ?echura T. Interpolation method for robot trajectory planning[C]//2015 20th InternationalConference on Process Control (PC)。 IEEE, 2015: 406-411.
[55] Sommariva A, Vianello M. Polynomial fitting and interpolation on circular sections[J]. AppliedMathematics and Computation, 2015, 258: 410-424.
[56] Bhowmick S, Mukhopadhyay J, Deb A K. Fast Path planning on planar occupancy grid exploiting geometryof obstacles[C]//2017 Ninth International Conference on Advances in Pattern Recognition (ICAPR)。 IEEE,2017: 1-6.
[57] Zhang N, Zhang Y, Ma C, et al. Path planning of six-DOF serial robots based on improved artificialpotential field method[C]//2017 IEEE International Conference on Robotics and Biomimetics (ROBIO)。IEEE, 2017: 617-621.
[58] Santiago R M C, De Ocampo A L, Ubando A T, et al. Path planning for mobile robots using geneticalgorithm and probabilistic roadmap[C]//2017IEEE 9th International Conference on Humanoid,Nanotechnology, Information Technology, Communication and Control, Environment and Management(HNICEM)。 IEEE, 2017: 1-5.
[59] Shen H. A study of welding robot path planning application based on Genetic Ant Colony HybridAlgorithm[C]//2016 IEEE Advanced Information Management, Communicates, Electronic and AutomationControl Conference (IMCEC)。 IEEE, 2016: 1743-1746.
[60] Chen Y W, Chiu W Y. Optimal robot path planning system by using a neural network-basedapproach[C]//2015 international automatic control conference (CACS)。 IEEE, 2015: 85-90.
[61] Nie Z, Yang X, Gao S, et al. Research on autonomous moving robot path planning based on improvedparticle swarm optimization[C]//2016 IEEE Congress on Evolutionary Computation (CEC)。 IEEE, 2016:2532-2536.
[62] 貝前程, 劉海英, 張紹杰, 裴云成。 基于改進(jìn)傳統人工勢場(chǎng)法的機器人避障和路徑規劃研究[J]. 齊魯工業(yè)大學(xué)學(xué)報, 2019(06): 53-58.
[63] 陳爾奎, 吳梅花。 基于改進(jìn)遺傳算法和改進(jìn)人工勢場(chǎng)法的復雜環(huán)境下移動(dòng)機器人路徑規劃[J]. 科學(xué)技術(shù)與工程, 2018, 18(33): 79-85.
[64] Chen S, Yang Z, Liu Z, et al. An improved artificial potential field based path planning algorithm forunmanned aerial vehicle in dynamic environments[C]//2017 International Conference on Security, PatternAnalysis, and Cybernetics (SPAC)。 IEEE, 2017: 591-596.
[65] Ma C, Zhang Y, Zhao Q, et al. 6R Serial Manipulator Space Path Planning Based on RRT[C]//2016 8thInternational Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC)。 IEEE, 2016, 2:99-102.
[66] Zhang H, Wang Y, Zheng J, et al. Path planning of industrial robot based on improved RRT algorithm incomplex environments[J]. IEEE Access, 2018, 6(53): 296-306.
[67] Song A, Si G. Remote monitoring system based on Zigbee wireless sensor network[C]//2017 29th ChineseControl And Decision Conference (CCDC)。 IEEE, 2017: 2618-2621.
[68] Agajo J, Kolo J G, Obiaradimson I C, et al. REMOTE MONITORING AND AUTOMATED DIAGNOSISVIA INTERACTIVE SOFWARE INTERFACE USING WIRELESS COMMUNICATION NETWORK"TELEMEDICINE"[J]. ATBU Journal of Science, Technology and Education, 2016, 4(1): 95-109.
[69] Zhang Y, Liu H, Su X, et al. Remote mobile health monitoring system based on smart phone andbrowser/server structure[J]. Journal of healthcare engineering, 2015, 6(4): 717-738.
[70] Filguiera R, Krause A, Atkinson M, et al. dispel4py: A Python Framework for Data-Intensive ScientificComputing[J]. International Journal of High Performance Computing Applications, 2017, 31(4): 316-334.
[71] 黃傳祿。 基于Python的MYSQL數據庫訪(fǎng)問(wèn)技術(shù)[J]. 現代信息科技, 2017, 1(4): 73-75.
[72] Raschka S. Python machine learning[M]. Packt Publishing Ltd, 2015.
致謝
歲月長(cháng)河,奔流不息,短暫的三年研究生學(xué)習生活即將結束,正式步入社會(huì )。來(lái)到南郵,對我而言是進(jìn)入一個(gè)全新的學(xué)術(shù)殿堂,偌大的校園,濃厚的學(xué)術(shù)氛圍以及擁有浩瀚書(shū)海的圖書(shū)館。我非常感謝那些在研究生課程學(xué)習中,出現過(guò)的每一位授課老師,是他們讓我更加近距離的理解南郵"厚德弘毅、求是篤行"的校訓;我也要感謝那些為我課題研究而幫助過(guò)我的人,正因有了他們,才讓我更加清晰的明白自己的學(xué)習任務(wù)和研究?jì)热荩约般@研方向,也很感謝他們不厭其煩的為我解答各種在研究過(guò)程中遇到的大小問(wèn)題;學(xué)習的道路中雖然會(huì )遇到磕絆,但更多的還是那些與你同行的伙伴。我很高興在三年學(xué)習生活中遇到的室友、認識的同學(xué)和交到的朋友,是他們與我朝夕相處,共同分享學(xué)習過(guò)程中的收獲,但更多的是給我帶來(lái)了打發(fā)那些枯燥時(shí)光的無(wú)限歡樂(lè ),讓我的青蔥歲月可回首,可追憶。
最真摯的感謝,要獻給我的研究生導師徐豐羽教授。他不像高中老師那樣,每天在課堂上給你講授知識;他也不像本科老師那樣,對課后的學(xué)習不聞不問(wèn)。他更像是一位家長(cháng),時(shí)不時(shí)的關(guān)心你的學(xué)習進(jìn)展,當你困惑時(shí),給你一定的指引;當你迷茫時(shí),又給你點(diǎn)亮一盞明燈。同時(shí),徐老師在工作之余,也非常關(guān)心我們的生活,為了豐富我們的課余生活,徐老師也讓師兄弟們經(jīng)常一起聚會(huì ),參加活動(dòng),讓師門(mén)感情更加凝聚。值此論文完稿之際,再次向徐老師表達我由衷的敬意和誠摯的感謝。
在這里,我也要感謝申景金老師在我攻讀研究生期間提供的無(wú)私幫助和指導。感謝課題組的楊中師兄、余洪亮師兄、楊裕棟師兄,同門(mén)孟凡昌、郭義全,以及師弟呂凡、曹旭東、蘆雨軒、江豐友、鮑書(shū)行、鄭鑫的一路陪伴和幫助,給枯燥的實(shí)驗室學(xué)習增添了許多樂(lè )趣。
最后,我還要感謝我的父母和家人,感謝他們對我學(xué)業(yè)的理解和支持,讓我在學(xué)習和生活中無(wú)憂(yōu)無(wú)慮,盡情享受青春時(shí)光。
在即將畢業(yè)之際,再次衷心地感謝一直以來(lái)關(guān)心與幫助我的親友、老師與同學(xué)們!
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)