24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要
機器人(機械臂)是能夠在三維空間中實(shí)現許多類(lèi)似人的行為與功能的多自由度機器。隨著(zhù)中國經(jīng)濟的快速發(fā)展,中國對工業(yè)機器人的數量和質(zhì)量都有很高的需求。現有的 SCARA 機械手大多數采用 PC 與運動(dòng)控制卡相配合的方式進(jìn)行系統控制,該方式的響應存在一定延遲,并且控制設備的成本較高。Linux 系統是一個(gè)成熟而穩定的操作系統,它以其開(kāi)源、穩定、免費的優(yōu)勢在嵌入式系統中的應用越來(lái)越廣。利用基于 Linux 系統的嵌入式平臺作為 SCARA 機械臂的控制端不僅能提高系統的實(shí)時(shí)性,并且能降低控制平臺的成本。
本文首先分析了研究的背景,并總結了近年來(lái)國內外針對機械手控制系統的研究。然后介紹了 SCARA 機械手的硬件參數及其機械結構,并在此基礎上建立笛卡爾坐標系,進(jìn)行了 SCARA 型機械手的運動(dòng)學(xué)分析,繪制了機械手的工作區間,并介紹了軌跡疵點(diǎn)的剔除流程。
隨后,本文結合軟件系統、硬件系統的設計,概述了機械手控制系統的總體方案,設計了軟件系統的框架,介紹了 Linux 系統開(kāi)發(fā)平臺與交叉編譯環(huán)境的搭建過(guò)程。而為了實(shí)現生產(chǎn)線(xiàn)多臺機器人的組網(wǎng)運行,并能夠實(shí)時(shí)監控每臺機器人的運行狀況,直接對接到生產(chǎn)管理部門(mén)。本文設計通過(guò)基于 Qt 的機械臂應用軟件對 SCARA 型機械手進(jìn)行運動(dòng)控制,系統介紹了機械臂 UI 中登錄界面、設備列表、編程界面、IO 狀態(tài)等主要界面的功能及實(shí)現方法,并詳細講解了基于多線(xiàn)程操作技術(shù)與 TCP/IP 協(xié)議的網(wǎng)絡(luò )通訊系統設計方案與實(shí)現方法。
作為應用最為廣泛的繪圖軟件,AutoCAD 繪制的圖形還無(wú)法直接被機械臂系統所用,因此本文分析了 DXF 格式文件的數據結構,研究了其中數據的提取方法,設計并概述了機械臂控制系統軟件的圖紙導入與程序文件傳輸的應用性功能,然后進(jìn)行了機械臂嵌入式系統與機械臂 UI 的網(wǎng)絡(luò )通訊、文件傳輸測試。
最后,為了測試本文設計的機械臂運動(dòng)控制系統的實(shí)用性與可靠性,也為了檢驗 SCARA 型機械臂應用的廣泛性,利用機械臂 UI 的圖紙導入功能,結合數控系統中的刀具補償算法,對機械臂進(jìn)行了應用性的測試。
關(guān)鍵字:SCARA、工業(yè)機器人、Linux、Qt、DXF 文件、刀具半徑補償
Abstract
Robot (robot arm) is a multi-degree-of-freedom machine capable of realizing many human-like behaviors and functions in three-dimensional space. With the rapid development of China's economy, China's demand for industrial robots, both in quantity and quality have a very high demand. Most of the existing SCARA manipulator control "PC + control card", response delay, control equipment, high cost. Linux system is a mature and stable operating system, it is its open source, stable, free of charge in the embedded system in the application of more and more widely. The use of Linux-based embedded platform as a SCARA manipulator can not only improve the real-time control system, and can reduce the cost of the control platform. In this paper, the background of the research is analyzed, and the research on the control system of manipulator at home and abroad in recent years is summarized. Then, the hardware parameters of SCARA manipulator and its mechanical structure are introduced. Based on this, the Cartesian coordinate system is set up, the kinematics analysis of SCARA manipulator is made, the working range ofmanipulator is drawn, and the defect removal process of trajectory is introduced.
Subsequently, this paper combines software system and hardware system design, summarizes the overall plan of the robot control system, designs the software system framework, introduces the Linux system development platform and the crosscompilation environment construction process. In order to achieve the production line of multiple robots of the network operation, and real-time monitoring of the operation of each robot, directly to the production management department. In this paper, we design and implement the motion control of SCARA manipulator by using Qt-based manipulator. The function and implementation method of the interface of HMI, such as login interface, device list, programming interface and IO state are introduced systematically. Multi - thread Operation Technology and TCP / IP Protocol Network Communication System Design Scheme and Implementation Method.
As the most widely used drawing software, AutoCAD graphics can not be directly used by the robot arm system. Therefore, this paper analyzes the data structure of the DXF format file, studies the method of data extraction, and designs and summarizes the software of the arm control system software. The paper introduces the application function of the program file transfer, and then carries on the network communication and file transfer test of the embedded system of the robot arm and the UI of the robot.
Finally, in order to test the practicability and reliability of the manipulator arm motion control system designed in this paper, and to test the extensiveness of SCARA manipulator, using the drawing import function of the manipulator UI and the tool compensation algorithm in NC system, The manipulator was tested for applicability.
Key words: SCARA, robot, Linux, Qt, DXF format files, tool radius compensation
本文中主要研究對象是 SCARA 型工業(yè)機械手。隨著(zhù)中國經(jīng)濟的快速發(fā)展,考慮到青壯年勞動(dòng)力的不斷減少,我國對工業(yè)機器人的數量和質(zhì)量都有很高的需求,機器人代替傳統勞動(dòng)力進(jìn)行工業(yè)生產(chǎn)是未來(lái)工業(yè)發(fā)展的必然趨勢。通過(guò)使用國內設備與零件,研究和設計特殊工業(yè)機器人,是打破外國機器人的市場(chǎng)壟斷,提高中國工業(yè)機器人自主知識產(chǎn)權的關(guān)鍵因素。
工業(yè)機器人的基礎是其機械本體,對機器人機械結構的優(yōu)化是改善工業(yè)機器人操作性能,提升其高效、可靠等方面表現的重要因素。SCARA 型機械手的控制系統要求工作穩定、響應速度快,現有的 SCARA 機械手大多數采用 PC 與運動(dòng)控制卡相配合的方式進(jìn)行系統控制,該方式的響應存在一定延遲,并且控制設備的成本較高。Linux 系統是一個(gè)成熟而穩定的操作系統,它以其開(kāi)源、穩定、免費的優(yōu)勢在嵌入式系統中的應用越來(lái)越廣。使用基于 Linux 的嵌入式平臺作為SCARA 機械臂的控制端有很多優(yōu)點(diǎn),它不僅可以改善實(shí)時(shí)系統,而且可以降低相應的制造成本。另外,Linux 系統提供了強大的網(wǎng)絡(luò )功能,其強大的語(yǔ)言編譯器 GCC,C ++等也很容易得到,不僅系統成熟,而且易于使用。
在本研究中,將通過(guò)基于 Qt 的 PC 端機械臂應用軟件的網(wǎng)絡(luò )通訊系統對SCARA 型機械手進(jìn)行運動(dòng)的控制,以實(shí)現更快捷方便的運動(dòng)控制。機械臂嵌入式系統與 PC 端應用軟件之間的通訊機制采用 TCP/IP 通訊協(xié)議,這樣的設計具有很好的應用價(jià)值,它能夠實(shí)現生產(chǎn)線(xiàn)多臺機器人的組網(wǎng)運行,并能夠實(shí)時(shí)監控每臺機器人的運行狀況,直接對接到生產(chǎn)管理部門(mén)。
PC 端的機械臂 UI 采用跨平臺設計,選用 Qt 做為開(kāi)發(fā)環(huán)境。Qt 是基于 C ++的跨平臺圖形用戶(hù)界面應用框架,相比 MFC 是一個(gè)時(shí)尚的圖形界面設計和開(kāi)發(fā)工具,相對于 MFC 有很多優(yōu)點(diǎn)。首先是跨平臺的特性,Qt 支持大多數主流操作系統,但 MFC 只用于 Windows 界面開(kāi)發(fā);Qt 的開(kāi)源性很好,提供了源代碼,方便學(xué)習及開(kāi)發(fā);并且它擁有豐富的 API 函數,支持 QML 腳本開(kāi)發(fā),提高了用戶(hù)的實(shí)際開(kāi)發(fā)效率。
作為當今社會(huì )中最廣泛使用的繪圖軟件,AutoCAD 的繪圖不能被機器人臂系統直接使用,本設計將分析由 AutoCAD 繪圖生成的 DXF(Drawing ExchangeFormat)文件的數據結構,并編寫(xiě)程序將可用的有效圖形數據直接提取到機器人臂運動(dòng)控制系統中。
本研究還將通過(guò)讀取工業(yè)生產(chǎn)中的一些零件圖的 DXF 文件,生成對應的實(shí)際刀具加工軌跡圖,通過(guò)對軌跡數據點(diǎn)的下發(fā),操作機械手沿著(zhù)該軌跡進(jìn)行運動(dòng)。
此研究,不僅能對此 SCARA 型機械臂的運動(dòng)控制系統進(jìn)行一個(gè)實(shí)際應用檢測,還是 SCARA 型機械臂對傳統數控系統中刀補算法的應用實(shí)踐。
因此,本文結合 SCARA 型機械臂的發(fā)展趨勢,研究基于 Linux 系統的機械臂運動(dòng)控制系統無(wú)疑具有重要的現實(shí)意義和實(shí)用價(jià)值。
本研究主要設計了基于 Linux 系統下的 SCARA 型機械手運動(dòng)控制系統軟件。此控制系統軟件主要利用 Linux C 語(yǔ)言開(kāi)發(fā),而 PC 終端的機器人 UI 軟件主要利用 QML 與 JavaScript 語(yǔ)言開(kāi)發(fā)。
本論文各章節主要研究?jì)热萑缦拢?/span>
第一章主要介紹了工業(yè)機器人的研究背景及世界范圍的機器人發(fā)展趨勢,概述了國內機器人技術(shù)的發(fā)展歷程與一些國外發(fā)達國家的機器人發(fā)展史,并介紹了國內外工業(yè)機器人的研究現狀,最后闡述了本文的研究意義。
第二章首先說(shuō)明了 SCARA 機械手的硬件參數,然后分析了其機械結構并在此基礎上建立了笛卡爾坐標系,通過(guò)機械手硬件參數進(jìn)行了 SCARA 型機械手的運動(dòng)學(xué)分析,最后繪制了機械手的工作區間,并介紹了軌跡疵點(diǎn)的剔除流程。
第三章結合軟件系統、硬件系統的設計,概述了機械手控制系統的總體方案,設計了軟件系統的框架,介紹了 Linux 系統開(kāi)發(fā)平臺與交叉編譯環(huán)境的搭建過(guò)程。接著(zhù)詳細講解了基于多線(xiàn)程操作技術(shù)與 TCP/IP 協(xié)議的網(wǎng)絡(luò )通訊系統設計方案與實(shí)現方法。最后,根據軟件系統的結構流程設計了基于 Qt 的機器人 UI 界面,并系統介紹了登錄界面、設備列表、設備初始化、編程界面、IO 狀態(tài)等主要界面的功能及實(shí)現方法。
第四章主要內容為 SCARA 機械臂控制系統應用性技術(shù)的實(shí)現,包括了工業(yè)圖紙的導入與程序文件的傳輸。首先設計并概述了機械臂控制系統軟件的圖紙導入功能。隨后分析了 DXF 格式文件的數據結構,并研究了其中數據的提取方法,然后介紹了圖紙文件在編程界面中的繪制方法。之后介紹了文件傳輸的整體流程,及該過(guò)程中涉及的 MD5 碼及 Base64 編碼算法,最后進(jìn)行了 SCARA 型機械臂的嵌入式控制系統與機械臂 UI 的網(wǎng)絡(luò )通訊測試與文件傳輸系統的測試。
第五章主要內容為 SCARA 型機械臂對刀補算法的實(shí)現試驗。首先對數控系統中刀具半徑補償算法進(jìn)行了研究,隨后在經(jīng)過(guò)機器人 UI 讀取圖紙數據、刀具半徑補償計算、實(shí)際軌跡數據下發(fā)、機械臂實(shí)際運行測試等步驟后,通過(guò)對機械臂實(shí)際運動(dòng)軌跡與機械臂關(guān)節運動(dòng)曲線(xiàn)的觀(guān)察,得出結論。
SCARA型機械臂運動(dòng)控制系統演示:

SCARA 機械手實(shí)體模型
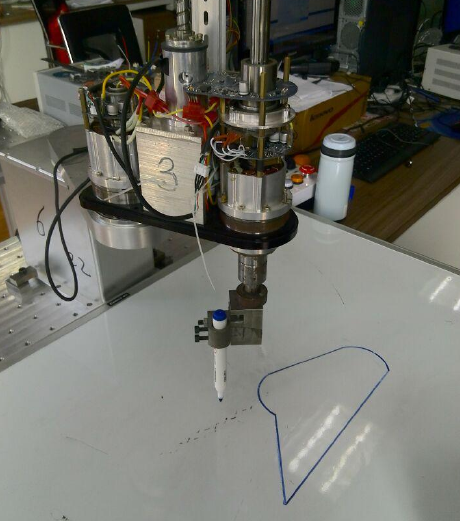
SCARA 型機械臂對刀補算法的實(shí)現

機械臂 UI 軟件登錄界面
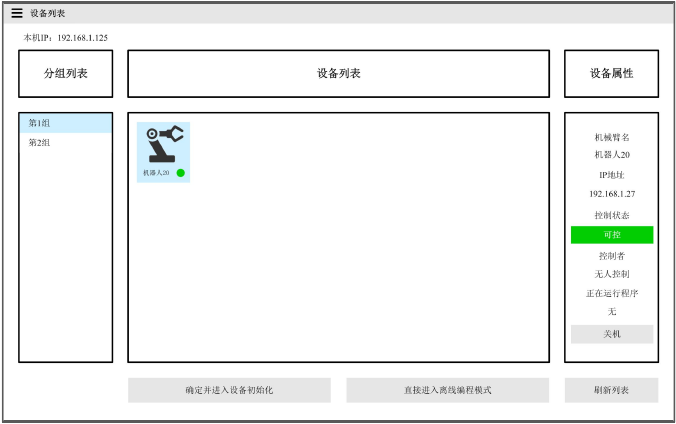
設備列表界面

設備初始化界面
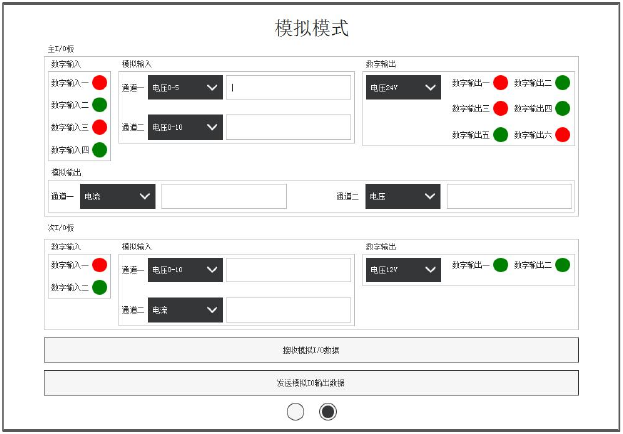
IO 狀態(tài)模擬模式界面
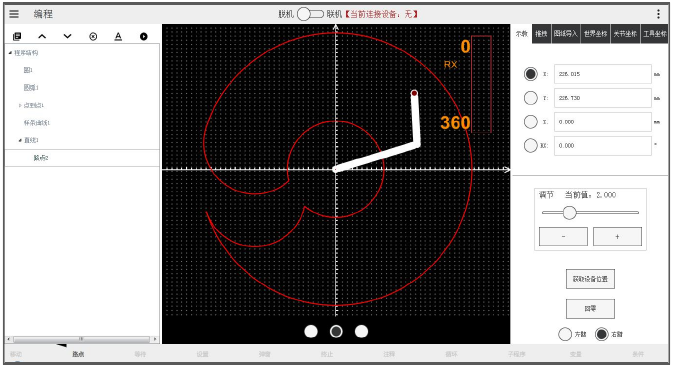
編程界面
目錄
摘要
Abstract
目錄
第 1 章 緒論
1.1 引言
1.2 工業(yè)機器人的分類(lèi)
1.3 工業(yè)機器人的國內外研究現狀
1.3.1 國內研究現狀
1.3.2 國外研究現狀
1.4 本文研究意義及主要研究?jì)热?br />
1.4.1 研究意義
1.4.2 主要研究?jì)热?br />
1.5 本章小節
第 2 章 建立 SCARA 型機械手運動(dòng)學(xué)模型
2.1 SCARA 型機械手的結構
2.2 SCARA 型機械手的硬件參數
2.3 推導 SCARA 型機械手的正、逆運動(dòng)學(xué)解
2.3.1 建立 SCARA 型機械手的運動(dòng)坐標系
2.3.2 正運動(dòng)學(xué)解
2.3.3 逆運動(dòng)學(xué)解
2.4 SCARA 機械手工作區間分析
2.4.1 SCARA 型機械手工作區間繪制
2.4.2 軌跡點(diǎn)的疵點(diǎn)判斷
2.5 本章小結
第 3 章 SCARA 型機械手控制系統設計
3.1 控制系統總體方案設計
3.2 控制系統軟件平臺設計
3.2.1 軟件系統概述
3.2.2 交叉編譯環(huán)境的構建
3.2.3 嵌入式 Linux 基本開(kāi)發(fā)環(huán)境搭建
3.3 嵌入式平臺的通訊系統設計
3.3.1 通訊系統主程序流程設計
3.3.2 基于 TCP/IP 協(xié)議的網(wǎng)絡(luò )通訊
3.3.3 通訊系統的多線(xiàn)程操作
3.4 控制系統軟件的 UI 設計
3.4.1 基于 Qt 的應用軟件框架設計
3.4.2 登錄界面與賬戶(hù)信息儲存
3.4.3 設備列表的界面設計及實(shí)現方法
3.4.4 設備初始化界面設計
3.4.5 I/O 狀態(tài)界面設計
3.4.6 編程界面設計
3.5 本章小結
第 4 章 機械臂控制系統的應用實(shí)現
4.1 控制系統軟件應用型功能介紹
4.2 工業(yè)圖形文件的導入與繪制
4.2.1 DXF 格式文件簡(jiǎn)介
4.2.2 DXF 文件的數據結構分析
4.2.3 DXF 文件的數據提取
4.2.4 圖紙文件的繪制
4.3 程序文件的傳輸及測試
4.3.1 文件傳輸流程概述
4.3.2 Base64 編碼算法及 MD5 碼介紹
4.3.3 文件傳輸及網(wǎng)絡(luò )通訊測試
4.4 本章小結
第 5 章 刀具半徑補償算法的機械手實(shí)現
5.1 刀補算法的機械手實(shí)現概述
5.2 刀具半徑補償原理
5.3 直線(xiàn)過(guò)渡的刀補算法研究
5.3.1 直線(xiàn)接直線(xiàn)情形
5.3.2 直線(xiàn)接圓弧或圓弧接直線(xiàn)情形
5.3.3 圓弧接圓弧情形
5.4 SCARA 型機械臂對刀補算法的實(shí)現
5.5 本章小結
第 6 章 總結與展望
6.1 總結
6.2 展望
參考文獻
攻讀碩士期間的科研成果
致謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)