24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
液壓機械臂是深海智能精確作業(yè)的核心裝置,是深海勘測和作業(yè)的關(guān)鍵工具,在落實(shí)我國海洋戰略、建設海洋強國方面具有重要地位。論文在"中科院戰略性先導A類(lèi)科技專(zhuān)項"任務(wù)"智能精確作業(yè)模塊研制"的支持下,以深海液壓機械臂為研究對象,設計了機械臂的總體方案,分析了機械臂的運動(dòng)學(xué)和軌跡規劃,研究了液壓關(guān)節三種控制算法。仿真和實(shí)驗結果表明,系統設計和控制算法研宄滿(mǎn)足研制深海液壓機械臂的要求。論文的主要工作如下:
1.針對深海液壓機械臂的設計問(wèn)題,提出了機械臂總體、機械結構、關(guān)節密封、液壓和控制系統等設計方案。計算了機械臂六個(gè)關(guān)節工作時(shí)所需的最大力矩,確定了各個(gè)關(guān)節執行器的型號,并在末端速度20mm/S目標參數的約束下做了仿真,結果表明設計方案可行。
2.針對深海液壓機械臂的運動(dòng)學(xué)問(wèn)題,依據D-H參數建立了機械臂的運動(dòng)學(xué)模型,采用變換矩陣法推導了機械臂正向運動(dòng)學(xué)方程,利用解析解法求解了機械臂運動(dòng)學(xué)逆解,并運用蒙特卡洛法分析了機械臂的工作空間。計算和仿真結果表明所設計的機械臂存在運動(dòng)學(xué)逆解,且工作空間滿(mǎn)足設計目標。
3.針對深海液壓機械臂的軌跡規劃問(wèn)題,分析了關(guān)節空間中三次多項式插值法、五次多項式插值法,研宄了笛卡爾空間中的直線(xiàn)插補法、圓弧插補法,設計了基于5段S型加減速的軌跡規劃。仿真結果表明基于5段S型加減速的軌跡規劃計算量小且加速度連續,為機械臂運動(dòng)控制提供了支撐。
4.針對深海液壓機械臂的關(guān)節控制問(wèn)題,建立了肩關(guān)節控制系統的數學(xué)模型,設計了經(jīng)典比例積分微分(ProportionIntegrationDiferentiation,PID)、單神經(jīng)元PID和前饋補償PID的控制算法,并針對三種算法進(jìn)行了仿真分析;最后采用經(jīng)典PID控制算法針對肩關(guān)節系統做了實(shí)驗,仿真和實(shí)驗結果表明所設計的控制算法滿(mǎn)足機械臂精度需求。
關(guān)鍵詞:深海液壓機械臂;運動(dòng)學(xué)分析;軌跡規劃;S型加減速;比例積分微分
abstract
Hydraulic manipulator is the core device of deep-sea intelligent and accurate operation. It is a key tool for deep-sea survey and operation. It plays an important role in implementing China's marine strategy and building a marine power. With the support of the task "development of intelligent and accurate operation module" of "strategic leading class a science and technology project of Chinese Academy of Sciences", taking the deep-sea hydraulic manipulator as the research object, this paper designs the overall scheme of the manipulator, analyzes the kinematics and trajectory planning of the manipulator, and studies three control algorithms of the hydraulic joint. Simulation and experimental results show that the system design and control algorithm research meet the requirements of developing deep-sea hydraulic manipulator. The main work of this paper is as follows:
1. Aiming at the design problem of deep-sea hydraulic manipulator, the design schemes of manipulator overall, mechanical structure, joint seal, hydraulic and control system are put forward. The maximum torque required by the six joints of the manipulator is calculated, the model of each joint actuator is determined, and the simulation is carried out under the constraint of the target parameter of end speed 20mm / s. The results show that the design scheme is feasible.
2. Aiming at the kinematics of the deep-sea hydraulic manipulator, the kinematics model of the manipulator is established according to the D-H parameters, the forward kinematics equation of the manipulator is deduced by the transformation matrix method, the inverse kinematics of the manipulator is solved by the analytical solution, and the workspace of the manipulator is analyzed by the Monte Carlo method. The calculation and simulation results show that the designed manipulator has inverse kinematics solution, and the workspace meets the design goal.
3. Aiming at the trajectory planning problem of deep-sea hydraulic manipulator, the cubic polynomial interpolation method and quintic polynomial interpolation method in joint space are analyzed, the linear interpolation method and circular interpolation method in Cartesian space are studied, and the trajectory planning based on 5-segment S-type acceleration and deceleration is designed. The simulation results show that the trajectory planning based on 5-segment S-type acceleration and deceleration has small amount of calculation and continuous acceleration, which provides support for the motion control of the manipulator.
4. Aiming at the joint control problem of deep-sea hydraulic manipulator, the mathematical model of shoulder joint control system is established, and the control algorithms of classical proportional integration differentiation (PID), single neuron PID and feedforward compensation PID are designed, and the three algorithms are simulated and analyzed; Finally, the classical PID control algorithm is used to do experiments for the shoulder joint system. The simulation and experimental results show that the designed control algorithm meets the accuracy requirements of the manipulator.
Key words: deep sea hydraulic manipulator; Kinematic analysis; Trajectory planning; S-type acceleration and deceleration; Proportional integral differential
目錄
第1章緒論
1.1 研究背景及意義
海洋占地球表面積的70%,擁有著(zhù)極其豐富的生物、礦物和能源1-2].為了解決陸地上資源短缺的問(wèn)題,人類(lèi)開(kāi)發(fā)利用太陽(yáng)能、風(fēng)能等新型能源的同時(shí),也將目光轉向了深海。進(jìn)入21世紀后,開(kāi)發(fā)利用海洋資源、深入探索深海奧秘成為展示國家綜合國力的重要標志和展開(kāi)國際合作的重要平臺凹。面對當前的國際形勢和我國的地理因素,探索開(kāi)發(fā)海洋資源、建設海洋強國成為了我國重要的戰略方向之一。
由于人類(lèi)無(wú)法直接深入海底完成海洋資源的開(kāi)采,因此能夠適應深海環(huán)境的水下機器人成為了人類(lèi)開(kāi)發(fā)海洋資源的重要工具。到目前為止,全世界正在致力于水下機器人技術(shù)的研究與開(kāi)發(fā)。伴隨著(zhù)水下機器人技術(shù)的發(fā)展,水下機器人的研究也獲得了很多令人矚目的成果。在全世界的共同努力之下,水下機器人已經(jīng)成功應用到了包括工業(yè)、漁業(yè)、考古和軍事等各個(gè)領(lǐng)域。
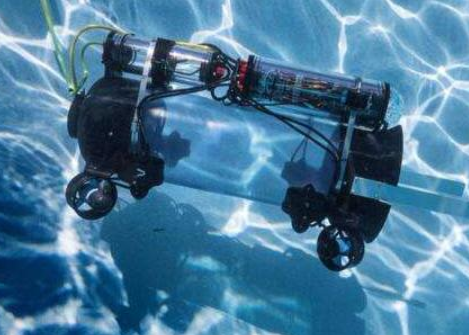
在水下機器人的研制方面,國外起步較早,美國、俄羅斯、德國、日本、加拿大等國家發(fā)展迅速,每個(gè)國家都有自己代表性的水下機器人。我國在這方面雖然起步較晚,但是近幾年我國在海洋裝備領(lǐng)域的投入不斷提高,也開(kāi)發(fā)出了一系列型號的水下機器人。水下機器人主要分為兩大類(lèi):載人水下機器人(HumanOccupied Vehicle,簡(jiǎn)稱(chēng)HOV)和無(wú)人水下機器人(Unmanned Underwater Vehicle,簡(jiǎn)稱(chēng)UUV) 147. 無(wú)人水下機器人又可分為有纜遙控式水下航行器( RemotelyOperated Vehicle,簡(jiǎn)稱(chēng)ROV)和自治水F機器人(Autonomous Underwater Vehicle,AUV) 14-71, 如圖1.1為幾款國內外典型的HOV和ROV.
日本"SHINKAI 6500"號是一款典型的載人水下潛水器,如圖1.1 (a)所示。其在1989年建造完成,最大下潛深度為6527米,創(chuàng )造了當時(shí)的載人潛水器記錄1."SHINKAI 6500"號可容納兩名潛航員和- - 名科學(xué)家,并外搭載了兩個(gè)最大抓取重量為100千克的液壓機械手。中國"蛟龍號"載人潛水器是由國家海洋局組織,由中船重工702所和沈陽(yáng)自動(dòng)化研究所等單位聯(lián)合設計和研制的深海潛水器9,如圖1.1 (b)所示。它最大下潛深度為7020米,在潛水器的左右兩側在同樣搭載了兩個(gè)可用于潛航員操作的液壓機械手,潛水器一次性最大負載為240千克01.美國"Max Rover" ROV是最先進(jìn)的用全電力驅動(dòng)型的ROV,如圖1.1 (c)所示,目前已經(jīng)有了MK-1, MK-2, MK-3三代產(chǎn)品,其下載深度最大為3000米,有效負載為90千克。"海斗一-號"是由沈陽(yáng)自動(dòng)化所牽頭,聯(lián)合國內數十家知名單位共同研制的我國首臺作業(yè)型全海深自主遙控潛水器,如圖1.1(d)所示。它的下潛深度為10907 米,通過(guò)遙操作控制機械手完成了在海底的抓取和物體釋放等全部操作任務(wù)121."海斗- -號"在馬里亞納海溝成功完成首次萬(wàn)米海底試驗,在多項作業(yè)任務(wù)中取得了圓滿(mǎn)成功,開(kāi)創(chuàng )了我國萬(wàn)米級ROV的先河,為今后我國的海底ROV研制積累了寶貴的經(jīng)驗1.
從上面分析的幾款水下機器人中可以看出,每一個(gè)ROV和HOV都搭載一個(gè)或者多個(gè)機械手用來(lái)完成相關(guān)的作業(yè)任務(wù)。水下機械手作為水下機器人最重要的作業(yè)工具,是保證其順利進(jìn)行深海作業(yè)時(shí)的重要執行機構。近年來(lái)水下機械臂有了一定的發(fā)展,但是還存在一些問(wèn)題有 待解決:
(1)水下機械手大多數都是采用主從伺服的遙控方式去控制,由操作人員由視頻信號或者眼睛去觀(guān)察到作業(yè)對象,然后通過(guò)操作主手來(lái)控制從手的抓取。
這樣的操作方式過(guò)程繁瑣,難度較高,嚴重依賴(lài)工作人員的操作熟練和準確程度。
(2)由于深海距離較遠,信號傳輸時(shí)的延時(shí)導致從手的運動(dòng)滯后,甚至不連續,不規范,有可能導致機械手無(wú)法一次性完成抓取任務(wù)。
(3)手爪控制精度較低。由于水下機械手的工作方式是主手控制從手,操作人員無(wú)法感知機械手抓取力的大小,這樣極有可能由于抓取力度過(guò)大,造成作業(yè)對象損壞,或者抓取力度過(guò)小,導致抓取對象脫落。
針對以_上問(wèn)題,本文設計了一款具有多種感知功能,能實(shí)現對作業(yè)目標的自主識別、自主定位、自主抓取功能的深海液壓機械臂。以所設計的深海機械臂為研究對象,分析了機械臂的系統方案設計、運動(dòng)學(xué);設計了機械臂的軌跡規劃方法和液壓關(guān)節控制算法,并且通過(guò)仿真和實(shí)驗驗證了軌跡規劃方法和控制算法的可行性,為實(shí)現深海液壓機械臂的控制和水下高精度自主作業(yè)提供了良好的理論依據。
1.2國內外研究現狀
1.2.1國外研究現狀
1.2.2國內研究現狀
1.3本文主要研究?jì)热?/p>
第2章深海液壓機械臂系統方案設計
2.1深海液壓機械總體方案設計
2.1.1機械臂系統設計
2.1.2機械臂的技術(shù)參數
2.1.3機械臂材料的選擇
2.2深海液壓機械臂的結構設計
2.2.1各關(guān)節設計與力矩計算
2.2.2關(guān)節密封設計方案
2.3深海液壓機械臂液壓系統設計
2.3.1液壓系統總體設計方案
2.3.2液壓系統流量分析
2.4深海液壓機械臂控制系統設計
2.4.1控制系統組成設計
2.4.2控制方案設計
2.5本章小結
第3章深海液壓機械臂運動(dòng)學(xué)分析
3.1深海液壓機械臂運動(dòng)學(xué)建模
3.1.1坐標系變換理論基礎
3.1.2機械臂連桿坐標系的建立
3.2深海液壓機械臂運動(dòng)學(xué)分析
3.2.1機械臂運動(dòng)學(xué)正
3.2.2機械臂運動(dòng)學(xué)逆解,
3.3深海液壓機械臂運動(dòng)學(xué)仿真
3.3.1機械臂運動(dòng)學(xué)正解仿真
3.3.2機械臂運動(dòng)學(xué)逆解仿真
3.4深海液壓機械臂工作空間分析
3.5本章小結
第4章深海液壓機械臂軌跡規劃及仿真
4.1關(guān)節空間軌跡規劃
4.1.1三次多項式插值
4.1.2五次多項式插值法
4.2笛卡爾空間軌跡規劃
4.2.1直線(xiàn)軌跡插補
4.2.2圓弧軌跡插補
43基于5段s型加減速的軌跡規劃
4.4本章小結
第5章液壓關(guān)節控制系統的仿真與實(shí)驗
5.1液壓關(guān)節控制系統數學(xué)模型的建立
5.2液壓關(guān)節控制系統控制器設計
5.2.1基于經(jīng)典PID控制律的控制器設計
5.2.2基于單神經(jīng)元的PID控制器設計
5.2.3基于前饋補償的PID控制器設計
5.3液壓關(guān)節控制系統仿真與分析
5.3.1經(jīng)典PID控制器仿真
5.3.2單神經(jīng)元PID控制器仿真
5.3.3前饋補償PID控制器仿真
5.4液壓關(guān)節控制系統實(shí)驗與分析
5.4.1控制系統平臺的搭建
5.4.2基于經(jīng)典PID控制律實(shí)驗與分析
5.5本章小結
第6章總結與展望
6.1 總結
本文以"中科院戰略性先導科技專(zhuān)項"子課題"智能精確作業(yè)模塊研制"為依托,以所設計的深海液壓機械臂為研究對象,分析了機械臂的運動(dòng)學(xué)、軌跡規劃,并針對液壓關(guān)節控制問(wèn)題設計了三種控制算法,搭建了實(shí)驗平臺并做了實(shí)驗驗證與分析。本文的主要研究工作及成果如下: .
1.依據深海液壓機械臂的作業(yè)需求,確定了機械臂的技術(shù)指標,提出了機械臂的設計方案,闡述了機械臂的機械結構、關(guān)節密封方案及控制系統,設計了機械臂的液壓系統;依據靜力學(xué)和動(dòng)力學(xué)方程計算出機械臂的各關(guān)節力矩,確定各關(guān)節執行器的型號;根據所選定的各關(guān)節執行器型號在機械臂末端20mm/s速度的約束下進(jìn)行仿真,計算了液壓系統流量。結果表明機械臂各關(guān)節選型合理,液壓系統的整體性能滿(mǎn)足設計需求。
2.對深海液壓機械臂的運動(dòng)學(xué)和工作空間進(jìn)行了分析。根據所建立的后置連桿坐標系和D-H參數得到了深海液壓機械臂的運動(dòng)學(xué)模型。采用坐標變換法分析了機械臂的正向運動(dòng)學(xué),利用反變換法解出機械臂運動(dòng)學(xué)逆解;在MATLAB中建立了機械臂的模型。仿真驗證了機械臂正逆解:利用蒙特卡洛法對機械臂的工作空間進(jìn)行了分析,并將工作空間分別在xoY,xOZ,YOZ平面上投影。結果表明各連桿參數合理,工作范圍滿(mǎn)足設計要求。
3.對深海液壓機械臂的軌跡規劃方法進(jìn)行了研究。推導了關(guān)節空間中三次多項式插值和五次多項式插值算法的位移、速度、加速度的表達式;笛卡爾空間中分析了直線(xiàn)插補和圓弧插補兩種方法,并利用MATLAB軟件針對上述幾種方法做了仿真實(shí)驗。最后結合深海作業(yè)環(huán)境,在關(guān)節空間中設計了的5段S型加減速的軌跡規劃,仿真表明該規劃算法的簡(jiǎn)單且加速度連續,為機械臂的軌跡規劃提供了一種方法。
4.對深海液壓機械臂的關(guān)節控制算法進(jìn)行了研究。本文以肩關(guān)節執行器螺旋擺動(dòng)馬達為研究對象,建立肩關(guān)節液壓控制系統的數學(xué)模型,得到了系統的閉環(huán)傳遞函數。基于PID控制算法的思想,分析了經(jīng)典PID控制算法、單神經(jīng)元PID控制算法和前饋補償PID控制算法的設計原理,并且利用MATLAB軟件對三種控制算法做了仿真分析。針對經(jīng)典PID控制算法,本文搭建了肩關(guān)節液壓控制系統實(shí)驗平臺對該算法做了實(shí)驗驗證,結果表明位置誤差滿(mǎn)足機械臂的控制精度需求,為機械臂的控制提供了實(shí)驗參考。
6.2 展望
本文針對所設計的深海液壓機械臂進(jìn)行了流量特性、運動(dòng)學(xué)、軌跡規劃和運動(dòng)控制的相關(guān)研究,利用MATLAB仿真軟件進(jìn)行了一系列的仿真。但是由于接觸本課題的時(shí)間較短、機械臂加工周期較長(cháng)以及本人相關(guān)知識有限,絕大部分的工作仍停留在理論分析和仿真實(shí)驗中,且還存在一些有 待解決的問(wèn)題,現總結如下:
1.本文所分析的深海液壓機械臂的D-H多數只是理論設計得出,在加工制造過(guò)程中會(huì )存在- -定的誤差,在對實(shí)際的機械臂控制之前,需要對機械臂的誤差進(jìn)行標定和補償,使機械臂的誤差降到最低。
2.液壓系統是一個(gè)復雜的時(shí)滯、非線(xiàn)性系統,對液壓系統的控制不僅要考慮液壓油泄露、油壓不穩定等一系列相關(guān)的問(wèn)題, 還要考慮機械臂在深海作業(yè)時(shí)海水壓力帶來(lái)的油壓補償的問(wèn)題。
3.由于所設計的機械臂要完成的任務(wù)是對50Kg作業(yè)目標的自主識別、自主定位、自主抓取,所以機械臂與視覺(jué)、觸覺(jué)、力覺(jué)傳感器的配合是作業(yè)任務(wù)成功的關(guān)鍵,尤其是在機械臂移動(dòng)抓取的過(guò)程中,與視覺(jué)配合所用到的視覺(jué)伺服控制算法還需要進(jìn)行大量的實(shí)驗驗證。
致謝
三年時(shí)間,轉瞬即逝,伴隨著(zhù)論文的完成,我的研究生生涯也接近了尾聲。
在中國科學(xué)技術(shù)大學(xué)和中國科學(xué)院智能機械所的三年時(shí)光中,遇到了許多關(guān)心和幫助過(guò)我的老師和同學(xué),在此對他們表示感謝。
首先向我的導師高理富研究員表達由衷的感謝!在過(guò)去的三年時(shí)光中,高老師帶領(lǐng)我走進(jìn)機器人領(lǐng)域,給予我參與中科院先導科技專(zhuān)項"智能精確作業(yè)模塊"課題的機會(huì ),接觸并深入研究了機器人相關(guān)的專(zhuān)業(yè)知識,在我的科研道路上畫(huà)下濃墨重彩的一筆。高老師不僅在學(xué)術(shù)方面成為了我的引路人,更是用他的人格魅力征服的我,教會(huì )了我許多為人處世的道理,讓我受益匪淺。
感謝智能感知技術(shù)研究中心的老師們,是他們給我提供了一個(gè)良好的科研平臺。特別感謝葛運建老師、宋全軍老師、未博老師、聶余滿(mǎn)老師在學(xué)業(yè)上的給予我的指導和幫助;感謝曹會(huì )彬老師在電控技術(shù)方面給予我針對性的指導;感謝郭偉斌老師對我學(xué)術(shù)論文的認真審閱和修改;感謝孫玉香老師、江曼老師在科研實(shí)驗中給予我的指導和答疑:感謝孫玉蘋(píng)老師、朱麗琳老師給予我生活上的關(guān)心和幫助:同時(shí)感謝研究院夏文彬老師,作為我們的班主任,她事事盡職盡責,在學(xué)術(shù)上和生活上給了我許多關(guān)心和照顧。
感謝智能感知技術(shù)研究中心的同學(xué)們,大家來(lái)自天南地北,因緣分組成了這個(gè)大家庭,讓我感受到了家的溫暖。特別感謝王大慶師兄、李旭師兄、胡敦師兄、謝陳磊師兄、陸偉師兄、許玉云師姐、張倩倩師姐、余田田師姐給予我的指導和照題。感謝朱道俊同學(xué)、周心悅同學(xué)、汪正全同學(xué)、劉宏偉同學(xué)、陳康裕同學(xué)、董坤同學(xué)--路上的陪伴和鼓勵。同時(shí)還要感謝張越師弟及其他的師弟師妹幫助和陪伴。
感謝女朋友-路上的陪伴、理解和鼓勵,讓我在科研的道路上充滿(mǎn)希望和力量。最后感謝我的父母,感謝他們二十六年的養育之恩,他們是我最堅強的后盾,在我的成長(cháng)之路上默默而堅定的推著(zhù)我向前走!
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)