24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
針對附著(zhù)在海洋船舶和海上平臺表面的海洋污損物的清洗需求,本文設計了一種超靈巧機械臂,研究了機械臂的運動(dòng)學(xué)及路徑規劃等問(wèn)題。采用仿生學(xué)設計思想和模塊化設計理念,提出了基于兩自由度并聯(lián)機構的模塊關(guān)節,采用三種不同尺寸的模塊關(guān)節組成了超靈巧機械臂。該超靈巧機械臂的模塊關(guān)節采用中空的布局使高壓水管可以在機械臂內部穿過(guò)。建立了超靈巧機械臂的力學(xué)模型,設計了液壓缸和液壓控制回路。
建立了超靈巧機械臂模塊關(guān)節的運動(dòng)學(xué)模型,求解了驅動(dòng)變量和姿態(tài)變量等式,在此基礎上對模塊關(guān)節的尺寸參數進(jìn)行了優(yōu)化分析。根據超靈巧機械臂整臂串并混聯(lián)的特點(diǎn),利用改進(jìn)后的 D-H 法建立了超靈巧機械臂整臂運動(dòng)學(xué)模型,得到了整臂運動(dòng)學(xué)正解并求解了超靈巧機械臂工作空間。
應用 A*搜索算法規劃了超靈巧機械臂末端點(diǎn)的全局路徑,擬合了搜索路徑上的節點(diǎn),求解了超靈巧機械臂整臂的姿態(tài),實(shí)現了超靈巧機械臂的路徑規劃,給出了基于圓柱體包絡(luò )下的靜態(tài)碰撞檢測方法。利用 Adams 軟件仿真驗證了超靈巧機械臂路徑規劃的正確性以及在三維空間運動(dòng)的靈活性。
關(guān)鍵詞:并聯(lián)機構;超靈巧機械臂;運動(dòng)學(xué)分析;路徑規劃;虛擬樣機仿真

Abstract
Aiming at the cleaning demand of marine fouling objects attached to the surface of marine ships and offshore platforms, this paper designs a super-dexterous manipulator, and studies the kinematics and path planning of the manipulator. Using Bionics design idea and modular design concept, the module joint based on 2-DOF parallel mechanism is proposed, and the ultra-dexterous manipulator is composed of three different sizes of module joints. The modular joints of the ultra-dexterous manipulator use a hollow layout so that the high-pressure water pipe can pass through the inside of the robotic arm. The mechanical model of ultra-dexterous manipulator is established, and the hydraulic cylinder and hydraulic control circuit are designed.
The kinematics model of the joint of the super-dexterous manipulator module is established, and the driving variable and attitude variable equation are solved, and the dimension parameters of the module joint are optimized and analyzed on the basis of this. According to the characteristics of the whole arm string and blending of the ultra-dexterous manipulator, the kinematics model of the super-dexterous manipulator Arm is established by using the improved D-H method, and the positive solution of the whole arm kinematics is obtained and the working space of the super-dexterous manipulator is solved.
Based on the global path planning of the A* search algorithm at the end point of the ultra-dexterous manipulator, the nodes on the search path are fitted, the attitude of the whole arm of the super-dexterous manipulator is solved, the path planning of the super-dexterous manipulator is realized, and the static collision detection method under the envelope of the cylindrical body is given. The correctness of the path planning of the super-dexterous manipulator and the flexibility of the motion in three-dimensional space are verified by using Adams software simulation.
Keywords: parallel mechanism; super-dexterous manipulator; Kinematic analysis; Path planning; Virtual prototype simulation
目 錄
第 1 章 緒 論
1.1 課題背景及研究的目的和意義
我國的海洋領(lǐng)域面積廣闊,其中包括靠近陸地的海岸線(xiàn)近兩萬(wàn)公里,數量較多的島嶼、島礁,以及主張的海洋管轄區域達到了 300 萬(wàn)平方千米。 海洋領(lǐng)域相關(guān)產(chǎn)業(yè)不斷提升和發(fā)展,其中包括以海洋漁業(yè)、海洋礦業(yè)、海洋交通運輸業(yè)等為主等,這些以海洋為依托的產(chǎn)業(yè)得到了極大的發(fā)展,幾年來(lái)持續高于同期國家經(jīng)濟增速。
海洋帶動(dòng)的經(jīng)濟發(fā)展在國民經(jīng)濟中扮演著(zhù)越來(lái)越重要的角色,有力的支撐了開(kāi)放性經(jīng)濟的構建。國家不斷加大在海洋工程裝備及高技術(shù)船舶上的投入,推動(dòng)深海平臺建設、大型浮式海洋結構物的開(kāi)發(fā)和應用。另外還提出了智能機器人技術(shù)與海洋技術(shù)、對非結構環(huán)境中為人類(lèi)提供多種服務(wù)的集成智能機器人、危險服務(wù)機器人及海洋裝備為重點(diǎn)支持項目。海洋裝備及圍繞海洋裝備相關(guān)的高新技術(shù)發(fā)展已經(jīng)成為了各個(gè)國家搶占的制高點(diǎn),其中針對海洋平臺和海洋船舶表面的清洗裝備成為了發(fā)展的熱點(diǎn)[1].
(一)海洋大型平臺清洗
我國海洋大型平臺主要以海洋石油勘探開(kāi)發(fā)為主,平臺水下部分的導管架立柱因長(cháng)期浸泡在海洋中表面會(huì )附著(zhù)海洋生物,對導管架產(chǎn)生腐蝕造成平臺安全隱患從而影響人員安全,因此需要對平臺水下立柱部分進(jìn)行周期性的清洗。海上石油探測開(kāi)采的日益增多,海洋平臺的清洗需求也迅速增加,那么高效、清潔、安全的機械自動(dòng)化清洗也成為了重要的研究?jì)热荨?/p>
(二)海底管道設施清洗
海底管道可以在海底連續的輸送大量的油氣,管道排布錯綜復雜,針對海底管道的清洗和檢測一般都需要潛水員攜帶清洗或檢測設備實(shí)施作業(yè),勞動(dòng)強度大且工作環(huán)境惡劣。開(kāi)發(fā)一種模塊化、自動(dòng)化的清洗設備來(lái)解決海底管道清洗難題,改善人員工作環(huán)境。
(三)船舶表面清洗
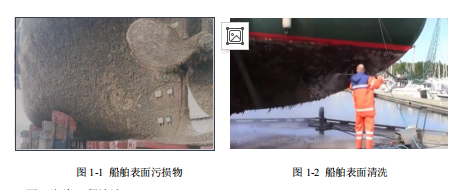
長(cháng)時(shí)間在海洋中航行的船舶,其表面會(huì )附著(zhù)一層海洋污損物。海洋中污損物種類(lèi)多達 4000 多種,大致可以分成兩類(lèi),如細菌、微生物等微小動(dòng)植物以及藤壺、動(dòng)物幼蟲(chóng)等宏觀(guān)生物[2].如圖 1-1 所示,這些附著(zhù)在船舶表面的污損物可以不斷在其表面生長(cháng)加快對船舶殼體的腐蝕,同時(shí)這些附著(zhù)物加大了對船舶航行的阻力,大大加快了燃油消耗,增加了船舶運輸成本[3],因此船舶表面需要及時(shí)有效的清洗,如圖1-2 所示。針對船舶清洗行業(yè),機械自動(dòng)化清洗設備具有廣闊的應用前景。
(四)海岸工程清洗
在靠近城市的港口和海岸工程上,由于水體的污染以及富營(yíng)養化,海洋生物繁殖旺盛,常常聚集附著(zhù)在港口橋梁、航道等海岸工程上,嚴重影響港口的正常運行,若長(cháng)期積累會(huì )直接影響這些海岸工程設施的使用壽命和降低安全性,因此對這些海岸工程的清洗也十分有必要。常見(jiàn)的清洗技術(shù)由噴砂清洗、生物清洗、人工處理技術(shù)、高壓水射流清洗技術(shù)等,其中高壓水射流清洗技術(shù)作為近年來(lái)新興技術(shù)得到了快速的發(fā)展和普及。對于海洋船舶、海洋管道等結構物的清洗主要是利用高壓水射流技術(shù),通常高壓水射流采用清水為介質(zhì),利用高速的水射流沖擊物體表面,其作用力超過(guò)物體表面污損物附著(zhù)在物體表面的粘合力時(shí),即可從物體表面剝離污損物[4].高壓水射流清洗相對于傳統人工清洗,清洗質(zhì)量好,速度快,對環(huán)境友好,應用范圍廣等諸多優(yōu)點(diǎn)[5].
隨著(zhù)勞動(dòng)力成本上升考慮到企業(yè)效益,設計一種超靈巧機械臂搭載高壓水射流來(lái)代替人工清洗就十分有必要了[6].相對于傳統清洗方法,通過(guò)超靈巧機械臂搭載高壓水射流的方法具有許多優(yōu)點(diǎn)。首先超靈巧機械臂可以在環(huán)境惡劣的情況下進(jìn)行清洗作業(yè),從人工作業(yè)則需要考慮工作環(huán)境是否符合要求,不能給人體帶來(lái)傷害。其次提高了清洗工作效率解決了海洋平臺數量增多帶來(lái)的周期性清洗,清洗任務(wù)繁重的問(wèn)題。綜上所述,設計一款超靈巧機械臂應用于清洗行業(yè),解決海洋船舶和海洋平臺等清洗問(wèn)題,為社會(huì )帶來(lái)巨大經(jīng)濟效益。
超靈巧機械臂作為一種復雜的機械臂,其設計過(guò)程是一個(gè)不斷迭代不斷完善的過(guò)程。鑒于目前已有超靈巧機械臂尺寸較小,工作活動(dòng)范圍不大且承載能力比較差的情況,考慮海洋船舶和海上平臺表面清洗工作范圍大的情況,結合并聯(lián)機構結構緊湊、剛度高、承載能力強的特點(diǎn)和液壓傳動(dòng)裝置功率體積比大的優(yōu)點(diǎn),設計一種基于液壓系統驅動(dòng)的超靈巧機械臂來(lái)滿(mǎn)足高靈活性,高承載能力,較大工作空間的這一類(lèi)應用場(chǎng)景需求。對超靈巧機械臂進(jìn)行功能需求分析列出以下 4 條。
(1)高靈巧性。超靈巧機械臂為了滿(mǎn)足在復雜環(huán)境下工作的要求,需要運動(dòng)靈活。這就需要較多的自由度來(lái)保證在不同條件下超靈巧機械臂能夠完成任務(wù),因為較多的自由度可以使機械臂實(shí)現足夠多的位姿。
(2)工作空間大。相對于醫療等領(lǐng)域的精細化工作環(huán)境,本文設計的超靈巧機械臂主要應用于海洋結構物等尺寸較大的工作環(huán)境,故超靈巧機械臂自身設計尺寸應較大以滿(mǎn)足較大范圍的工作環(huán)境。
(3)承載能力。由于設計的超靈巧機械臂臂展較長(cháng),導致其自重較大。此外若進(jìn)行一些探索、清洗的工作那么機械臂的末端往往會(huì )加載一些工具,那么高的承載能力不可或缺。
(4)操作簡(jiǎn)單。操控簡(jiǎn)單意味著(zhù)控制方面要盡可能的簡(jiǎn)單,好的機械產(chǎn)品一定具有好的操控性能,有利于產(chǎn)品的推廣和應用。
1.2 超靈巧機械臂研究現狀
1.2.1 國外超靈巧機械臂研究現狀
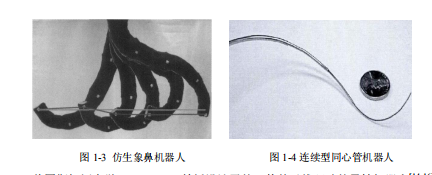
美國 Clemson 大學(xué)的 Walker D[7]和 Hannan W 教授設計的一種新型繩索驅動(dòng)仿象鼻子機械手臂[8-10],如圖 1-3 所示,該仿生象鼻機械臂由 16 個(gè)模塊關(guān)節組成,每個(gè)模塊可以 2 自由度的運動(dòng),整臂具有 32 個(gè)自由度可以實(shí)現靈活彎曲,伸展后總長(cháng)達到 800mm.機械臂整體分為四個(gè)大段,每一段由四個(gè)單元關(guān)節組成,采用四線(xiàn)驅動(dòng)的方式實(shí)現每段機械臂 2 自由度的運動(dòng)能力,每段的極限角度為 40 度,其直徑分別是 10.16cm,8.89cm,7.62cm 和 6.35cm.因此機械臂在工作空間中的任意姿態(tài)僅有8 個(gè)驅動(dòng)自由度,其余 24 冗余自由度則實(shí)現了一致的彎曲曲率。這樣該仿生象鼻機械臂在三維工作空間內可以實(shí)現靈活姿態(tài),因此可以實(shí)現對物體的包圍抓取。
美國 Webster R 教授等人設計了一款微小連續型導管機器人[11-12],如圖 1-4 所示,該導管機器人由直徑連續變化的同心 NiTi 管構成,該同心管具有超強彈性。圖中所示的同心管為己彎曲變形后彈性管,導管通過(guò)變形可以實(shí)現軸向的移動(dòng)和扭轉。該款連續型導管機器人具有靈敏快速和微動(dòng)能力特點(diǎn),可應用于對嬰幼兒器官的微創(chuàng )手術(shù)[13].
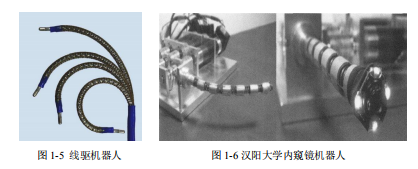
美國斯坦福大學(xué) Camarillo D 教授設計了的一款基于線(xiàn)驅動(dòng)的柔性機器人[14-16],如圖 1-5 所示,該款機器人由三段連續型關(guān)節組成,每段連續型柔性關(guān)節具有 2 個(gè)自由度,直徑大小是 4mm,總長(cháng)達到了 700mm.該柔性機器人的每段柔性關(guān)節是通過(guò)四條繩索實(shí)現關(guān)節 2 自由度運動(dòng),四條繩索之間間隔 90 度分布,關(guān)節內部中空設計,從而使數據線(xiàn)可以從機器人內部隱蔽式穿過(guò)。機器人利用具有彈性的合金薄壁材質(zhì)來(lái)保持其彎曲姿態(tài)。
漢陽(yáng)大學(xué) Choi D 等學(xué)者研發(fā)了一款內窺鏡機器人[17],如圖 1-6 所示,該內窺鏡機器人伸展后總的長(cháng)度是 104mm,其中模塊關(guān)節直徑為 8mm,模塊關(guān)節之間的連接是通過(guò)具有彈性的支架連接在一起,這些模塊間的彈性支架既連接了模塊關(guān)節又可以支撐整個(gè)機器人,維持機器人各種彎曲姿態(tài)而不變形。該內窺鏡機器人是通過(guò) 3根繩索的線(xiàn)驅動(dòng)實(shí)現機器人 2 自由度的彎曲以及沿自身軸向方向的伸縮運動(dòng)。
英國 OC 公司研發(fā)了一款可以應用于核電檢測的商業(yè)化連續型機器人[18],該機器人總長(cháng)達到了 2 米,直徑小于 100mm,同樣采用了繩索的驅動(dòng)形式實(shí)現每段關(guān)節2 自由度彎曲。該連續型機器人共有 16 個(gè)自由度,能夠實(shí)現 720 度的彎曲姿態(tài)。如圖 1-7 所示該連續型機器人正在核電檢測作業(yè)。
羅馬尼亞 Craiova 大學(xué)的 Boccolato G 教授采用仿生學(xué)設計思想,研制了一款可以在三維空間中實(shí)現自由轉動(dòng)的連續型機器人[19],如圖 1-8 所示。該連續型機器人由三段組成,每段具有 2 個(gè)自由度的彎曲運動(dòng),每段通過(guò)三根繩索實(shí)現驅動(dòng),仿生型機器人內部具有一根彈性支撐條,可以使機器人保持彎曲姿態(tài)。
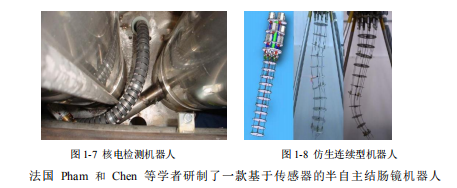
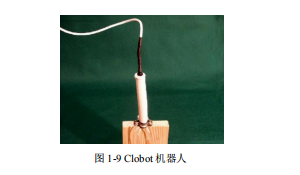
法國 Pham 和 Chen 等學(xué)者研制了一款基于傳感器的半自主結腸鏡機器人Clobot[20],如圖 1-9 所示,取整個(gè)機器人是由硅橡膠材料制作而成,因為主要用于人體醫學(xué)檢測因此該材料滿(mǎn)足了與人體腸道的相容性。該機器人整體是單端連續型的,外徑為 17mm,內徑 8mm,驅動(dòng)方式為氣壓驅動(dòng)。
1.2.2 國內超靈巧機械臂研究現狀
國內高校和科研機構針對超靈巧機械臂領(lǐng)域研究起步較晚但已取得較多研究成果。中國科學(xué)院沈陽(yáng)自動(dòng)化研究所郁樹(shù)梅等人研究的水陸兩棲蛇形機器人[22],如圖1-10 所示,該機器人采用模塊關(guān)節設計理念,由九個(gè)具有俯仰和偏轉的萬(wàn)向關(guān)節組成。關(guān)節之間用橡膠管連接作密封處理,使其可以在陸地和水下靈活運動(dòng)。

哈爾濱工業(yè)大學(xué)王海榮研制了一種借鑒脊柱結構的超靈巧機器臂[23].如圖 1-11所示,該超靈巧臂的設計應用了仿生學(xué)方法,通過(guò)分析無(wú)骨架類(lèi)的生物結構如象鼻、章魚(yú)觸手和由骨架類(lèi)的生物結構如人的脊柱、蛇的脊柱等結構特性,將其應用在機械臂的設計當中。該仿生超靈巧機械臂由六個(gè)模塊關(guān)節組成,每個(gè)關(guān)節的直徑為28mm,總重量為 500g,具有良好的靈巧性和柔順性。
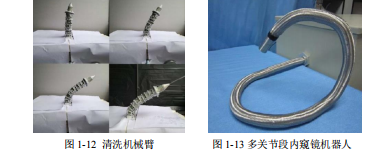
重慶交通大學(xué)羅天洪研制了一款可以吸附在船舶表面的機器人[24],機器人本體上又搭載有水射流的超靈巧機械臂進(jìn)而實(shí)現對輪船表面和螺旋槳的清洗。如圖 1-12所示,正在進(jìn)行噴水測試的超靈巧機械臂。哈爾濱工業(yè)大學(xué)胡海燕研制了一款多關(guān)節段連續型結腸內窺鏡機器人[25],如圖 1-13 所示,該內窺鏡機器人采用繩索驅動(dòng)的方式,實(shí)現單段機器人彎曲運動(dòng),每段機器人是由多節萬(wàn)向環(huán)通過(guò)鉚接耳連接而成,其外表用金屬網(wǎng)覆蓋,單段總長(cháng)為 110mm,整個(gè)內窺鏡機器人由五段單關(guān)節段串聯(lián)組成,實(shí)現了總長(cháng) 550mm,總的自由度為 10 的三維空間靈活彎曲運動(dòng)。
中國明航大學(xué)王維娟等人針對飛機油箱檢查的應用場(chǎng)景研制了一款飛機油箱檢測連續型機器人[26],如圖 1-14 所示,整臂有多段連續型關(guān)節組成,每段關(guān)節采用玻璃棒纖維作為柔性支撐桿來(lái)保持關(guān)節彎曲時(shí)姿態(tài),關(guān)節采用四根繩索驅動(dòng),繩索之間相錯 90 度并穿過(guò)若干關(guān)節支撐圓盤(pán)。圖中顯示三個(gè)柔性關(guān)節收尾相連,達到一定的長(cháng)度即可實(shí)現在飛機油箱內部遍歷、可達,探測的需求。

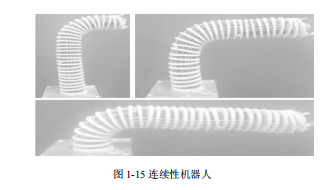
北京航空航天大學(xué)翟士民等人通過(guò)較多數量的橡膠墊片依次串聯(lián)組成連續型機器人,如圖 1-15 所示,該機械臂分為三段,每段具有 2 個(gè)自由度,通過(guò)三根鋼絲繩線(xiàn)型驅動(dòng),鋼絲繩相互相隔 120 度,連續型機器人整體具有 6 個(gè)自由度,可以向任意方向彎曲 100 度。
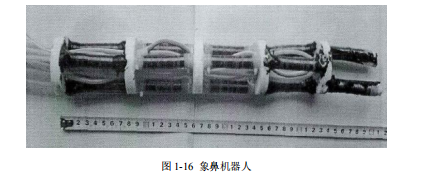
浙江工業(yè)大學(xué)邵鐵峰等人研制的一款氣動(dòng)柔性仿生象鼻[28],該仿生象鼻型連續機器人伸展后總長(cháng)為 400mm,如圖 1-16 所示,機器人末端具有 2 自由度的氣動(dòng)夾取機械手,可以實(shí)現對小型物體的抓取作業(yè)。
1.3 本文主要研究?jì)热?/strong>
海洋石油結構物、船舶、海底管道和海岸工程等設施在復雜的海洋環(huán)境下容易附著(zhù)和滋生海洋污損物,從而影響設施的使用壽命、可靠性能等,因此需要及時(shí)有效的清洗。本課題以此為應用背景,基于超靈巧機械臂在國內外的研究現狀,進(jìn)行超靈巧機械臂的整體結構方案確定、驅動(dòng)方式的選擇、模塊關(guān)節的尺寸優(yōu)化以及超靈巧機械臂運動(dòng)學(xué)的分析與仿真等。主要研究?jì)热莅ǎ?/p>
(1)針對超靈巧機械臂應用場(chǎng)景進(jìn)行功能需求分析,結合仿生學(xué)設計思想和模塊化設計理念,提出模塊關(guān)節 2SPS+U 并聯(lián)構型設計,進(jìn)行驅動(dòng)方式的選擇、關(guān)節材料的選取和靜力學(xué)校核。
(2)進(jìn)行超靈巧機械臂受力模型分析,求解液壓缸驅動(dòng)力,確定液壓缸的尺寸參數,設計合理的液壓回路系統。求解高壓水射流反沖力大小,驗證超靈巧機械臂的承載能力。
(3)建立單個(gè)模塊關(guān)節運動(dòng)學(xué)模型,求解驅動(dòng)變量和姿態(tài)變量的等式關(guān)系。分 析模塊關(guān)節工作空間,考慮模塊關(guān)節約束條件,優(yōu)化關(guān)節尺寸參數。
(4)建立超靈巧機械臂運動(dòng)學(xué)模型,分析驅動(dòng)空間和操作空間的關(guān)系,利用改進(jìn)的 D-H 法求解超靈巧機械臂正運行學(xué)方程。求解模塊關(guān)節四種姿態(tài)下超靈巧機械臂的工作空間。
(5)應用 A*搜索算法進(jìn)行超靈巧機械臂末端點(diǎn)的全局路徑規劃,擬合搜索路徑節點(diǎn),求解超靈巧機械臂整臂位姿,完成超靈巧機械臂的路徑規劃。
(6)利用 SolidWorks 工具建立虛擬樣機三維模型,在 Adams 軟件中進(jìn)行超靈巧機械臂的運動(dòng)學(xué)仿真和避障規劃仿真。
第 2 章 超靈巧機械臂設計
2.1 模塊關(guān)節與超靈巧機械臂設計
2.1.1 基于仿生學(xué)的設計思想
2.1.2 超靈巧機械臂模塊關(guān)節的設計
2.1.3 超靈巧機械臂三維模型的設計
2.1.4 高壓水射流反沖力的計算
2.1.5 超靈巧機械臂受力分析與驅動(dòng)缸的確定
2.2 靜力學(xué)校核
2.3 本章小結
第 3 章 超靈巧機械臂運動(dòng)學(xué)分析
3.1 模塊關(guān)節的運動(dòng)學(xué)分析
3.1.1 模塊關(guān)節運動(dòng)學(xué)模型建立
3.1.2 模塊關(guān)節工作空間分析
3.1.3 模塊關(guān)節運動(dòng)仿真分析
3.2 超靈巧機械臂運動(dòng)學(xué)方程建立
3.3 超靈巧機械臂的工作空間分析
3.3.1 模塊關(guān)節的姿態(tài)變換
3.3.2 機械臂的工作空間分析
3.4 本章小結
第 4 章 基于 A*算法的超靈巧機械臂路徑規劃
4.1 概述
4.2 超靈巧機械臂工作空間建模
4.3 基于 A*算法的全局路徑規劃
4.3.1 超靈巧機械臂末端點(diǎn)啟發(fā)函數的選擇
4.3.2 超靈巧機械臂全局路徑規劃的實(shí)現
4.4 超靈巧機械臂路徑規劃實(shí)例
4.4.1 路徑搜索
4.4.2 超靈巧機械臂末端點(diǎn)的擬合
4.4.3 超靈巧機械臂靜態(tài)下的碰撞檢測
4.5 本章小結
第 5 章 超靈巧機械臂的虛擬樣機運動(dòng)仿真
5.1 概述
5.2 運動(dòng)學(xué)仿真
5.2.1 超靈巧機械臂模型的建立
5.2.2 在 Adams 中添加零件屬性和運動(dòng)副
5.2.3 驅動(dòng)的添加
5.2.4 超靈巧機械臂的運動(dòng)學(xué)仿真
5.3 本章小結
結 論
本文針對海洋船舶清洗需求,設計了一種由并聯(lián)機構模塊關(guān)節組成的超靈巧機械臂,進(jìn)行了驅動(dòng)缸的確定和控制回路的設計,分析了超靈巧機械臂的運動(dòng)學(xué),規劃了超靈巧機械臂末端點(diǎn)的路徑規劃,最后進(jìn)行了運動(dòng)學(xué)仿真驗證。主要取得的研究成果如下:
(1)提出了一種串并混聯(lián)的超靈巧機械臂,機械臂由三種尺寸共九個(gè)并聯(lián)機構模塊關(guān)節組成,具有 18 個(gè)自由度三維空間運動(dòng)能力。該超靈巧機械臂結構簡(jiǎn)單,易于控制。
(2)求解了模塊關(guān)節驅動(dòng)變量和姿態(tài)變量的關(guān)系等式,分析了模塊關(guān)節約束條件,給出了大中小三種模塊關(guān)節優(yōu)化尺寸參數。
(3)建立了改進(jìn)后的 D-H 法超靈巧機械臂整臂運動(dòng)學(xué)模型,求解出超靈巧機械臂正運動(dòng)學(xué)方程,繪制出超靈巧機械臂工作空間末端點(diǎn)在三維空間的分布圖。
(4)應用 A*搜索算法實(shí)現了超靈巧機械臂末端點(diǎn)在工作空間的路徑規劃,求解出超靈巧機械臂姿態(tài),利用 Adams 軟件仿真驗證超靈巧機械臂在三維空間運動(dòng)的靈活性。
本文取得的創(chuàng )新性成果如下:
(1) 采用仿生學(xué)設計思想和模塊化設計理念,設計了一種采用并聯(lián)機構模塊關(guān)節連接的超靈巧機械臂,該機械臂結構簡(jiǎn)單,靈巧性好,易于控制。
(2)應用 A*搜索算法規劃了超靈巧機械臂末端點(diǎn)的全局路徑,擬合了搜索路徑上的節點(diǎn),求解了超靈巧機械臂整臂的姿態(tài),實(shí)現了超靈巧機械臂的路徑規劃。
基于并聯(lián)機構的超靈巧機械臂作為一種特種機器人,涉及了多個(gè)學(xué)科和領(lǐng)域的知識,未來(lái)具有廣闊的應用前景,但仍有很多問(wèn)題需要研究,包括以下幾點(diǎn):
(1)進(jìn)一步進(jìn)行試驗樣機的制備,完成實(shí)體樣機的測試。
(2)進(jìn)一步對超靈巧機械臂系統進(jìn)行優(yōu)化。其中包括在滿(mǎn)足超靈巧機械臂功能要求的前提下采用質(zhì)量更輕,性能更好的復合材料。以及添加傳感器等,提高超靈巧機械臂的未知環(huán)境下的適應能力和應用范圍。
(3)進(jìn)一步研究超靈巧機械臂在三維空間的動(dòng)態(tài)避障算法,使其能夠實(shí)現實(shí)時(shí)避障能力
參考文獻
[1] 毛進(jìn)宇。 履帶式船舶除銹爬壁機器人設計及分析[D]. 哈爾濱: 哈爾濱理工大學(xué)碩士學(xué)位論文, 2017: 1-9.
[2] 楊天笑, 胡煜峰, 陳池, 等。海水管線(xiàn)常見(jiàn)污損生物及研究展望[J]. 廣東化工, 2014, 41(22):88-89.
[3] 羅天洪, 王晴, 馬翔宇。 螺旋槳清洗機器人超靈巧機械臂設計[J]. 工程科學(xué)學(xué)報, 2017,39(06): 924-932.
[4] 楊滕飛, 曹紅波, 王洋。 高壓水射流清洗海水管路技術(shù)[J]. 船海工程, 2018, 47(06): 111-114.
[5] 張長(cháng)鵬, 魏世丞, 王玉江, 盛忠起, 等。 高壓水射流清洗除銹技術(shù)的發(fā)展現狀[J]. 材料保護,2018, 51(10): 119-142.
[6] 王麗萍, 蔡曉君, 竇艷濤, 等。 高壓水射流清洗參數實(shí)驗研究[J]. 實(shí)驗室研究與探索, 2017,36(08): 48-51.
[7] Walker D. Some issues in creating invertebrate robots[J]. Proceedings of the InternationalSymposium on Adaptive Motion of Animals and Machines. 2000, 30(1):28-37.
[8] Hannan W,Walker D.Kinematics and the Implementation of an Elephant's Trunk Manipulator andother Continuum Style Robots[J]. Journal of Robotic Systems. 2003, 20(2): 45-63.
[9] Walker D, Hannan W. A novel 'elephant's trunk' robot[C]. IEEE/ASME International Conferenceon Advanced Intelligent Mechatronics. Atlanta, 1999: 410-415.
[10] Hannan W, Walker D. The 'elephant trunk' manipulator, design and implementation[C].IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Como, Italy. 2001:14-19.
[11] Webster R, Romano J.Cowan N. Mechanics of precurved-tube continuum robot[J]. IEEETransactions on Robotics, 2009, 25(1): 67-78.
[12] Rucker D, Webster R. Parsimonious Evaluation of Concentric-tube Continuum Robot EquilibriumConformation[J]. IEEE Transactions on Biomedical Engineering, 2009, 56(9): 2308-2311.
[13] Rucker D,Jones B, Webster R. A Geometrically Exact Model for Externally LoadedConcentric-Tube Continuum Robots[J]. IEEE Transactions on Robotics, 2010, 26(5): 769-780.
[14] Camarillo D, Milne C, Carlson C, et al. Mechanics modelingmanipulators[J]. IEEE Transactions on Robotics, 2008, 24(6): 1262-1273.
[15] Camarillo D, Carlson C, Salisbury J. Configuration tracking for continuum manipulators withcoupled tendon drive[J]. IEEE Transactions on Robotics, 2009, 25(4): 798-808[16] Camarillo D, Loewke K, Carlson C, et al. Vision Based 3-D Shape Sensing of FlexibleManipulators[C]. IEEE International Conference on Robotics and Automation. Pasadena, CA.
2008: 2940-2947.
[17] Choi D, Yi B, Kim W. Design of a Spring Backbone Micro Endoscope[C]. IEEE/RSJInternational Conference on Intelligent Robots and Systems. San Diego, CA. 2007: 1815-1821.
[18] Buckingham R, Graham A. Dexterous manipulators for nuclear inspection and maintenance casestudy[C]. The 1st International Conference on Applied Robotics for the PowerIndustry, Montréal,Canada. 2010: 1-6.
[19] Boccolato G, Manta F, Dumitru S, et al. 3D Kinematics of a Tentacle Robot[J]. InternationalJournal of Systems Applications, Engineering & Development, 2010, 4(1): 1-8.
[20] Chen G, Pham M, Redarce T. Sensor based guidance control of a continuum robot for a semiautonomous colonoscopy[J]. Robotics and Autonomous Systems, 2009, 57: 712-722.
[21] Chen G, Pham M, Redarce T. A Semi-autonomous Micro-robotic System for Colonoscopy[C].IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand. 2009: 703-70.
[22] 郁樹(shù)梅, 王明輝, 馬書(shū)根, 李斌, 王越超。 水陸兩棲蛇形機器人的研制及其陸地和水下步態(tài)[J]. 機械工程學(xué)報, 2012, 48(09): 18-25.
[23] 王海榮, 樊紹巍, 倪風(fēng)雷, 劉宏。 一種基于脊柱結構原理的超靈巧機械臂設計[J]. 載人航天,2016, 22(05): 544-549.
[24] 王晴。 螺旋槳清洗機器人超靈巧機械臂設計與性能研究[D]. 重慶: 重慶交通大學(xué)碩士學(xué)位論文, 2017: 56-69.
[25] 胡海燕。 半自主式結腸內窺鏡機器人系統研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué)博士學(xué)位論文,2011: 23-66.
[26] 王維娟。 飛機油箱檢查機器人結構及運動(dòng)學(xué)研究[D]. 天津: 中國民航大學(xué)碩士學(xué)位論文,2013: 8-20.
[27] 翟士民, 劉榮, 薛彤。 繩驅動(dòng)連續型機械臂設計[J]. 機械工程與自動(dòng)化, 2015(2): 119-121.
[28] 邵鐵鋒。 氣動(dòng)柔性象鼻型連續機器人研究[D]. 浙江: 浙江工業(yè)大學(xué)博士學(xué)位論文, 2014:30-68.
[29] 蘇梅月, 周敏。 面向再制造的產(chǎn)品模塊化設計方法[J]. 組合機床與自動(dòng)化加工技術(shù),2019(01): 60-63.
[30] William M, Michael P. Stella. The arrangement and function of octopus arm musculature andconnective tissue[J]. Journal of Morphology,2007,268(10):33-35.
[31] 孟鵬。 高壓水射流清洗系統的設計及其試驗研究[D]. 南京: 南京農業(yè)大學(xué)碩士學(xué)位論文,2015: 15-20.
[32] 徐曉桐。 新型鐵鉆工的設計及分析[D]. 大連:大連理工大學(xué)碩士學(xué)位論文,2018: 45-78.
[33] 高殿榮, 等。 液壓與氣壓傳動(dòng)[M]. 北京: 機械工業(yè)出版社, 2013: 122-166.
[34] 李兵, 何正嘉, 等。 ANSYS workbench 設計、仿真與優(yōu)化[M]. 北京:清華大學(xué)出版社,2015:30-124.
[35] 張哲。 一種四足機器人的機構設計與分析[D]. 秦皇島: 燕山大學(xué)碩士學(xué)位論文, 2018: 26-28.
[36] 姚珂。 帶腰四足機器人的設計與分析[D]. 秦皇島: 燕山大學(xué)碩士學(xué)位論文, 2016: 34-38.
[37] 熊有倫, 等。 機器人學(xué)基礎[M]. 武漢: 華中科技大學(xué)出版社, 2015:32-52.
[38] Peter Corke. 機器人學(xué)、機器視覺(jué)與控制[M]. 北京: 電子工業(yè)出版社, 2016: 132-165.
[39] 張穎, 吳成東, 原寶龍。 機器人路徑規劃方法綜述[J]. 控制工程, 2003: 152-155.
[40] 張國棟, 陳金鑫, 吳鵬飛。 基于環(huán)境建模的 USV 軌跡規劃技術(shù)[J]. 指揮控制與仿真, 2018,40(05): 86-93.
[41] hu Q, Yan Y, Xing Z. Robot Path Planning Based on Artificial Potential Field ApproachwithSimulated Annealing[C]. IEEE International Conference on Intelligent Systems Design andApplications. Jinan, Shandong, China. 2006: 622-627.
[42] 周樹(shù)東。 遺傳算法原理及應用[M]. 北京: 國防工業(yè)出版社, 1999:23-55.
[43] 王江華, 趙燕。 改進(jìn)型蟻群算法在多關(guān)節機器人捕捉路徑規劃上的應用[J]. 實(shí)驗室研究與探索, 2017, 36(10): 41-44.
[44] 賈慶軒, 陳鋼, 孫漢旭, 鄭雙奇。 基于 A~*算法的空間機械臂避障路徑規劃[J]. 機械工程學(xué)報, 2010, 46(13): 109-115.
[45] 潘思宇, 徐向榮。 基于A(yíng)*算法的機器人一維與三維路徑規劃實(shí)現[J]. 井岡山大學(xué)學(xué)報, 2015,36(5): 85-87.
[46] 劉琳琳。 基于柵格地圖環(huán)境的機器人路徑規劃算法[J]. 機電信息, 2018, (30): 138-141.
[47] 宗成星, 陸亮, 雷新宇, 趙萍。 一種基于 A*算法的空間多自由度機械臂路徑規劃方法[J]. 合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版), 2017, 40(02): 164-168.
[48] 萬(wàn)平。 基于 A-star 算法的航路規劃算法設計與仿真研究[J]. 中國水運。 航道科技, 2018, (04):58-65.
[49] 魏迎梅。 虛描環(huán)境中物體碰撞檢測算法研究[D]. 長(cháng)沙: 國防科學(xué)技術(shù)大學(xué), 2000: 25-31.
[50] 鄒益勝, 丁國富, 許明恒, 等。 實(shí)時(shí)碰撞檢測算法綜述[J]. 計算機應用研究, 2008, 25(1):8-12.
[51] 王兆光。 六自由度機械臂避障路徑規劃研究[D]. 成都: 西南交通大學(xué)碩士學(xué)位論文, 2018:23-54.
[52] 馬登武, 葉文, 李瑛, 等。 基于包圍盒的碰撞檢測算法綜述[J]. 系統仿真學(xué)報, 2006, 18(4):1058-1061.
[53] 高玉琴。 三維空間中碰撞檢測算法的研究[D]. 武漢: 華中科技大學(xué)碩士學(xué)位論文, 2007:7-12.
[54] 劉靜。 大型三維編織機虛擬樣機研究[D]. 西安: 西安工程大學(xué)碩士學(xué)位論文, 2018: 45-55.
[55] 李增剛。 ADAMS 入門(mén)詳解與實(shí)例[M]. 北京: 國防工業(yè)出版社, 2010: 1-10.
[56] 彭棋擎, 李海陽(yáng)。 基于虛擬樣機技術(shù)的機械臂建模與仿真[J]. 華東理工大學(xué)學(xué)報 2007, 33(1):58-62.
致 謝
衷心感謝導師金振林教授! 感謝金教授在三年研究生學(xué)習生涯中的悉心指導和教誨。在科研工作中,金老師認真負責的工作態(tài)度,嚴謹求實(shí)的工作作風(fēng),兢兢業(yè)業(yè)的工作和踏踏實(shí)實(shí)的科研精神,是我終生的學(xué)習榜樣。此外,金老師在課題的選定及研究過(guò)程中給予了多次詳細的指導和點(diǎn)撥,從課題方向、課題進(jìn)展以及論文撰寫(xiě)和修改,處處受到了金老師高屋建瓴、提綱挈領(lǐng)的指導,體現了金教授學(xué)淵博、經(jīng)驗豐富科研能力。同樣在生活上,也得到了金老師無(wú)微不至的關(guān)心和教誨,讓我懂得了許多為人處世的道理,是我人生中最寶貴的財富。在此,再次向尊敬的導師金振林教授致以崇高的敬意和由衷的感謝!
感謝課題室張立猛、楊晨暉、劉海為在課題研究進(jìn)展過(guò)程中給予的建議和意見(jiàn)。
感謝博士師兄張金柱在我剛入課題室時(shí)的給予學(xué)習上的指引和幫助。感謝同窗好友張宗超、張全來(lái)和趙昌海在三年生活中對我的幫助。感謝陪伴我一路走來(lái)同學(xué)和朋友。
感謝我父母在研究生階段給我的支持和鼓勵。
感謝母校燕山大學(xué)提供優(yōu)秀的成長(cháng)平臺。
最后感謝百忙之中為我評閱論文以及提出寶貴意見(jiàn)的各位專(zhuān)家。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)