24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
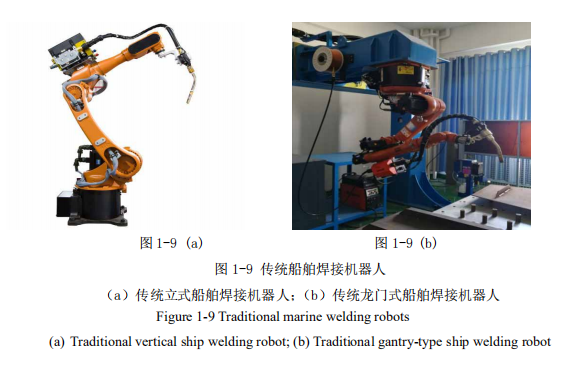
隨著(zhù)工業(yè)機器人以及船舶修造行業(yè)的快速發(fā)展,陸續出現了一批船舶自動(dòng)化焊接設備,主要包括基于水平導軌的單立柱式焊接機器人和基于桁架的龍門(mén)式焊接機器人。但其均為串聯(lián)結構的關(guān)節型機器人機構,其驅動(dòng)電機均安裝在各關(guān)節上,會(huì )導致末端執行器運動(dòng)慣量大、累積誤差大、動(dòng)力學(xué)性能不佳等問(wèn)題,特別是在流體載荷、風(fēng)載荷等激勵的港口復雜環(huán)境下,依然滿(mǎn)足不了船舶高強度、高精度焊接的要求。針對上述問(wèn)題,基于多自由度可控機構和并聯(lián)機構相關(guān)研究成果,對閉鏈式造船焊接機器人機構展開(kāi)探索。此類(lèi)少自由度閉鏈執行機構的電機均安裝在回轉機架上,采用外轉動(dòng)副驅動(dòng),閉鏈連桿傳動(dòng),在具有大空間、多軌跡柔性輸出的同時(shí)也避免了傳統機構的不足之處,能較好地適應造船焊接工作要求。全文展開(kāi)的研究工作如下:
首先,基于傳統焊接機器人的功能分析進(jìn)行其執行機構的創(chuàng )新設計,結合傳統再生運動(dòng)鏈法和新型平面基礎閉環(huán)子結構替換法進(jìn)行機構構型綜合,改變了傳統單一的結構形式,豐富了面向造船焊接任務(wù)的工程機械構型;將變胞理念引入造船焊接領(lǐng)域,設計一種變拓撲結構式造船焊接機器人機構,通過(guò)分析得到其變胞原理和構態(tài)演化過(guò)程,根據三種有效構態(tài)分別適用于不同焊接作業(yè),可為面向工程實(shí)際的變胞機構的設計與研究提供參考。
在此基礎上,基于 Assur 桿組和李群理論對綜合出的其中一種閉鏈式造船焊接機器人機構的構型組成原理及自由度進(jìn)行剖析;建立機構運動(dòng)學(xué)數學(xué)解析模型,得到機構的速度特性,利用雅克比矩陣法結合數值算例進(jìn)行奇異位形求解,在無(wú)奇異條件下得到機構的工作空間,揭示了機構的運動(dòng)學(xué)規律與特性。通過(guò)與二自由度閉鏈機構的對比得出該機構的優(yōu)勢所在:工作空間更大,同時(shí)具有定位和姿態(tài)調整功能;基于末端輸出位置的速度雅克比矩陣進(jìn)行性能分析,具有高靈巧度、可操作性高以及響應速度快的特點(diǎn)。
然后,對機構進(jìn)行受力分析,采用動(dòng)靜法建立閉鏈機構動(dòng)態(tài)靜力學(xué)模型;通過(guò)拉格朗日法對其進(jìn)行剛體動(dòng)力學(xué)建模,確定影響機構動(dòng)態(tài)性能的參數;由機構剛度分析揭示所受外力、機構內部以及位姿對機構剛度的影響。均可為后續伺服電機的選取及閉環(huán)控制系統的設計與研究提供一定的參考。
最后,建立閉鏈機構的虛擬樣機模型并導入 ADAMS,基于多種具體工作軌跡,通過(guò)正、逆向運動(dòng)學(xué)仿真分析進(jìn)一步驗證機構的合理性與實(shí)際可行性。
關(guān)鍵詞:并聯(lián)機構 變胞機構 構型綜合 運動(dòng)學(xué)分析 動(dòng)力學(xué)建模

Abstract
With the rapid development of industrial robots and ship repairing industry, a number of automatic welding equipment for ships have emerged, including single column welding robot based on horizontal guide rail and gantry welding robot based on truss. But all of them are articulated robotic mechanisms with series structure. Their driving motors are installed on all joints, which will lead to large inertia, large cumulative error and poor dynamic performance of the end-effector. Especially in the complex environment of ports stimulated by fluid load and wind load, they still can not meet the requirements of high-strength and high-precision welding of ships. Aiming at the above problems, based on the related research results of multi-degree-of-freedom (DOF) controllable mechanism and parallel mechanism, the closed-chain welding robot manipulator for shipbuilding is explored. The motors of this kind of low-degree-of-freedom closed-chain actuator are installed on the rotating frame. They are driven by external rotating pairs and closed-chain connecting rods.With large space and flexible output of multi-trajectory, it also avoids the shortcomings of traditional mechanism and can better meet the requirements of shipbuilding welding. The research work in this paper is as follows:
Firstly, based on the function analysis of the traditional welding robot, the innovative design of its actuator is carried out. The mechanism configuration is synthesized by combining the traditional regenerative kinematic chain method and the new planar foundation closed-loop substructure replacement method, which changes the traditional single structure form and enriches the configuration of engineering plant for the shipbuilding welding task; Introducing metamorphic mechanism into the field of shipbuilding welding, a variable topology structure welding robot manipulator for shipbuilding is designed. The metamorphic principle and configuration evolution process are obtained through analysis. According to the three effective configurations, they are suitable for different welding operations, which can provide references for the design and research of engineering-oriented metamorphic mechanism.
On this basis, based on Assurr groups and Lie group theory, the configuration principle and degree of freedom of one of the closed-chain welding robot mechanisms synthesized are dissected; The kinematics mathematical analytical model of the mechanism is established, and the velocity characteristics of the mechanism are obtained. The singularity of the mechanism is solved by using Jacobian matrix method combined with numerical examples, and the working space of the mechanism is obtained under the condition of no singularity. The kinematics laws and characteristics of the manipulator are revealed. The advantages of the mechanism are obtained by comparing with the 2-DOF closed-chain mechanism. Specifically, the workspace is larger, and it has the functions of positioning and attitude adjustment. Based on the velocity Jacobian matrix of the end output position, the performance analysis is carried out. It has the characteristics of high dexterity, high operability and fast response speed.
Then, the force analysis of the mechanism is carried out, and the dynamic and static model of the closed-chain mechanism is established by the dynamic and static method; The rigid body dynamics model is established by the Lagrange method, and the parameters affecting the dynamic performance of the mechanism are determined; The stiffness analysis of the mechanism reveals the influence of the external force, the internal mechanism and the position and posture on the stiffness of the mechanism. All of these can provide some references for the selection of servo motor and the design and research of closed-loop control system.
Finally, the virtual prototype model of the closed-chain mechanism is established and imported into ADAMS. Based on the specific working trajectories, the rationality and practical feasibility of the mechanism are further verified by forward and reverse kinematics simulation analysis.
Keywords: parallel mechanism; metamorphic mechanism; configuration synthesis; kinematic analysis; dynamic modeling
目 錄
第一章緒論
1.1課題來(lái)源
本課題依托廣西高校科學(xué)技術(shù)研究重點(diǎn)項目:多自由度可控機構式新型集裝箱正面吊的設計與研究(KY2015ZD131)以及北部灣大學(xué)高級別科研項目培育資助項目(國家級培育項目):連桿機構式新型港口機械設計理論與機理研究(2014PY-GJ06)共同進(jìn)行的,在此表示感謝!
1.2船舶焊接機器人的發(fā)展概況
1.2.1國外船舶焊接機器人的發(fā)展概況
UNIMATE,世界上的首臺工業(yè)機器人,于1959年在美國問(wèn)世。自此以后,機器人的發(fā)展異常迅速,被廣泛應用于汽車(chē)行業(yè)、電子加工產(chǎn)業(yè)以及塑料制品工業(yè)等多個(gè)領(lǐng)域,在解放勞動(dòng)力、提高生產(chǎn)效率、穩定產(chǎn)品質(zhì)量等方面發(fā)揮了巨大作用。機器人在工業(yè)生產(chǎn)中的不斷發(fā)展與投入使用率已經(jīng)成為反映一個(gè)國家機械自動(dòng)化生產(chǎn)能力高低程度的指標[1].
針對全球各行業(yè)中的工業(yè)機器人而言,焊接機器人種類(lèi)占據一半以上,在所有此類(lèi)焊接機器人當中,部分為專(zhuān)業(yè)型焊接機器人,而另一部分則通過(guò)改造,即在已有機器人的基礎上配備對應的焊接工具,總而言之,焊接機器人代表了大部分工業(yè)機器人。
回首焊接機器人的發(fā)展歷史,基本可總結為三個(gè)主要階段:
第一階段:多為基于5到6自由度手臂式示教再現工作方式的焊接機器人,可用于流水線(xiàn)上重復性的焊接工作。但其適應性不強,受人為因素影響較大,嚴重依賴(lài)于人工示教,因而對焊接產(chǎn)品的規格尺寸要求極高。
第二階段:基于傳感器技術(shù)的離線(xiàn)編程焊接機器人,隨著(zhù)傳感器和離線(xiàn)編程技術(shù)的日益改進(jìn)和完善,這種可編程的示教再現機器人現已處于實(shí)際應用研究過(guò)程中。
第三階段:多傳感器、具有高度自適應能力的智能化焊接機器人,依靠智能化技術(shù)完成多場(chǎng)合自主智能焊接,不在局限于單一示教再現型焊接,這也是科研人員追求的目標。
因此,不斷加大的焊接需求和不斷提高的焊接產(chǎn)品質(zhì)量將推動(dòng)以焊接機器人為首的自動(dòng)化及智能化技術(shù)的長(cháng)遠發(fā)展[1-2].在上世紀八十年代開(kāi)始,發(fā)達國家便開(kāi)始將焊接機器人引入造船行業(yè),早在上世紀七十年代,日本就已經(jīng)提出了造船行業(yè)新概念-"無(wú)人化船廠(chǎng)"[3].到二十世紀八十年代初,日本就已經(jīng)開(kāi)始有計劃有組織地研究焊接機器人,這也使得其在日本得到了快速發(fā)展,到八十年代末,弧焊機器人就被日本眾多船廠(chǎng)應用于船體管道焊接,并達到了很好的效果。
二十世紀九十年代末,日本鋼管(NKK)的津船廠(chǎng)便基本采用無(wú)人化控制生產(chǎn),采用多臺焊接機器人用于船舶合攏過(guò)程中的焊接作業(yè),在焊接速度、質(zhì)量、效率也均達到了國際先進(jìn)水平。在上世紀九十年代,為了與日本在全球造船業(yè)中競爭領(lǐng)導地位,韓國大量引進(jìn)國外造船的先進(jìn)技術(shù),同時(shí)注重自身對自動(dòng)化造船設備的相關(guān)開(kāi)發(fā)研究。其中,大宇重工玉浦船廠(chǎng)為了提高造船工作效率,使用了機器人進(jìn)行平面分段生產(chǎn)線(xiàn)的焊接作業(yè)。基于離線(xiàn)編程技術(shù),大宇造船及航運公司、釜山國立大學(xué)Chang-SeiKim等人在開(kāi)放式體系結構基礎上模擬實(shí)際工況,將焊接機器人引入到造船工業(yè)中[4-5].此外,一種輪式焊接機器人在韓國Pukyong國立大學(xué)被KamBO等人研制成功,得益于其整體構型小、質(zhì)量小等優(yōu)點(diǎn),能夠在艙體中自由移動(dòng)并完成格子形構件的焊接[6].隨后新加坡的MarceloH.AngJ等專(zhuān)門(mén)研制了一款由機器人、焊接、人機界面和龍門(mén)架組成的機器人系統并將其用于船舶焊接,適于大型小批量構件的焊接[7].此外,西班牙的某研究所也同樣研制出了一款焊接機器人系統,即移動(dòng)機器人平臺。該平臺具有四個(gè)腿部并有移動(dòng)功能,可應用于雙層外殼船舶建造過(guò)程中的焊接工作。于此同時(shí),美國更加注重工業(yè)機器人的應用研究,尤其是軍方在船舶建造業(yè)上更是投入重金研發(fā),早期的CM-T3-566型弧焊機器人便被投身于小型部件的生產(chǎn),軍方更是提出一種先進(jìn)的雙殼船建造的技術(shù)概念并通過(guò)遙控控制自動(dòng)焊機、焊臺和自動(dòng)升降設備。丹麥某造船廠(chǎng)通過(guò)REISRV6型示教機器人、B4機器人進(jìn)行一種特殊工件以及集裝箱船的焊接[8].奧地利的IGM機器人系統可用于民用商船、游輪等以及軍用艦艇甲板、隔層、曲面分段、攏合等建造工藝中并取得了眾多成就。與此同時(shí)英國、法國、德國、荷蘭等諸多國家也開(kāi)啟了自動(dòng)化造船焊接模式,主要完成造船中如焊接、切割、拼接和噴漆等工作[9].
縱觀(guān)世界各國對造船焊接機器人的研究發(fā)展概況,將機器人投入到船舶制造業(yè)中,部分代替直至全面代替人工焊接,實(shí)現機械化、自動(dòng)化、部分智能化甚至全智能化以及真正"無(wú)人化"是未來(lái)船舶建造的必然趨勢,也是實(shí)現造船大國、造船強國偉大目標的唯一途徑。
1.2.2國內船舶焊接機器人的發(fā)展概況
我國研究焊接機器人始于上世紀七十年代末,在起步時(shí)間上相比發(fā)達國家要滯后許多。直到八十年代中期,哈爾濱工業(yè)大學(xué)才研制出了我國第一臺HY-l型焊接機器人,隨后的HT-l00A型點(diǎn)焊機器人問(wèn)世并通過(guò)驗收標志著(zhù)我國的焊接機器人逐步走向了工業(yè)實(shí)用化發(fā)展道路[10].二十世紀九十年代以來(lái),在政府大力支持及各行業(yè)的不斷努力下,我國的產(chǎn)業(yè)機器人研發(fā)也取得了巨大的進(jìn)步,研發(fā)出的相應的機器人可應用于焊接、切割、裝配、搬運等各個(gè)工種上。2005年由上海交大的張軻等研發(fā)的焊接機器人系統,通過(guò)磁性輪式機構結合十字調節滑塊來(lái)達到機器人移動(dòng)的目的,具有自尋跡功能,實(shí)現了重型船舶甲板的自主移動(dòng)跟蹤焊接[11].2008年南昌大學(xué)毛志偉等人研制了基于旋轉電弧傳感的彎曲焊縫焊接機器人系統可完成對各類(lèi)彎曲角焊縫的自動(dòng)跟蹤焊接[12].隨后,由高校和企業(yè)合作,在潘際鑾院士的主持下一起研制了多用途弧焊機器人,此機器人工作空間大并具有全位置爬行能力,可完成大型艦船結構的焊接工作[13].
目前我國已然成為世界第二大經(jīng)濟體和世界第一大出口國,海上交通顯得日益重要,這對我國的船舶制造業(yè)來(lái)說(shuō)是一個(gè)契機。但是目前由我國自主研發(fā)出的船用焊接機器人并不能得到造船企業(yè)的認可與采用,這也使得國內使用焊接機器人的造船廠(chǎng)仍舊少見(jiàn),絕大多數造船企業(yè)依然采用人工焊接方式,用氣體保護焊來(lái)進(jìn)行造船焊接生產(chǎn)。而"柔性"機器人焊接生產(chǎn)線(xiàn)極其缺乏,在汽車(chē)、摩托車(chē)和工程機械制造行業(yè)中,焊接機器人的應用占據了主體,分別為65%、15%、16%,剩余行業(yè)僅為4%,且焊接手段與方式與發(fā)達國家相比存在巨大差距[13-14].
將示教再現機器人(第一階段)向離線(xiàn)編程焊接機器人(第二階段)以及智能化焊接機器人(第三階段)推廣發(fā)展并應用還有長(cháng)遠距離。
1.3并聯(lián)機構發(fā)展概況
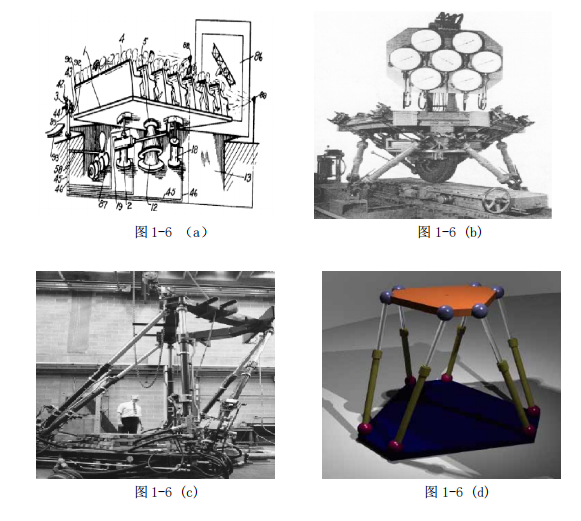
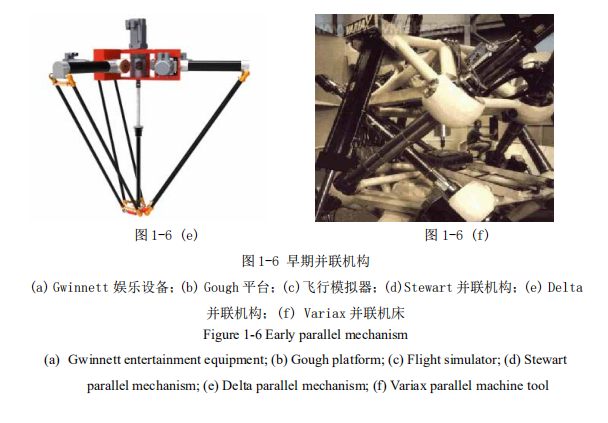
最早的并聯(lián)機構在上世紀三十年代初問(wèn)世,由Gwinnett[15]發(fā)明。隨后Pollaed[16]在其專(zhuān)利中首次提出了一種主要用于汽車(chē)噴漆操作的工業(yè)空間并聯(lián)機構。1962年,Gough[17]發(fā)明了一臺并聯(lián)機構,此機構具有六個(gè)自由度可用于檢測汽車(chē)輪胎,之后便出現了著(zhù)名的Stewart并聯(lián)機構[18],由其本人在Gough研究的基礎上展開(kāi)理論研究并研制,該機構主要當成飛行模擬器來(lái)使用。1978年,機構學(xué)研究領(lǐng)域的Hunt[19]教授最早聯(lián)系了機器人和并聯(lián)機構并設計新的六自由度并聯(lián)機構,系統分析了該機構分支運動(dòng)鏈的結構及其自由度。1988年,瑞士的Calvel[20]創(chuàng )造了一種三自由度并聯(lián)機構-DELTA并聯(lián)機構,此機構可做空間平移運動(dòng),已廣泛用于電子產(chǎn)品、食品、醫藥品的裝配流水線(xiàn)上。1994年,兩臺并聯(lián)機床在美國芝加哥國際機床博覽會(huì )上公開(kāi)亮相,分別為Hexapod和Variax并聯(lián)機床,雖然因種種因素沒(méi)能得到推廣,但自此并聯(lián)機構得到了各界的廣泛關(guān)注,開(kāi)始快速發(fā)展,并陸續應用于機床領(lǐng)域。
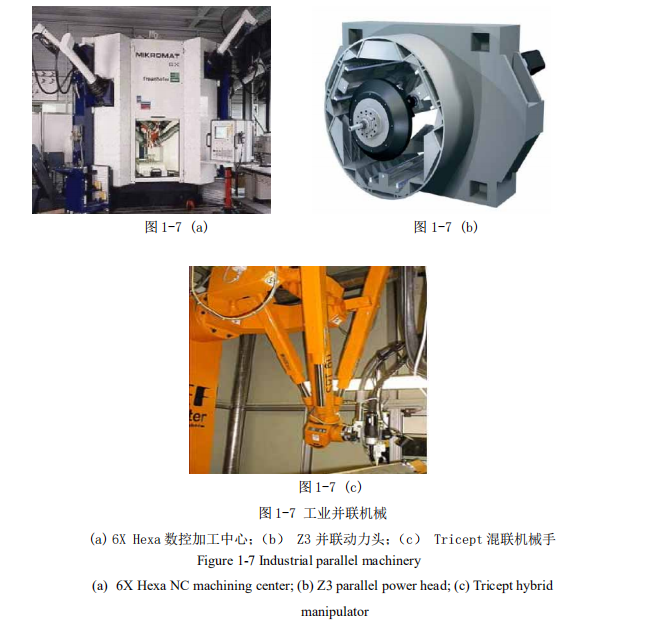
隨后一款6XHexa數控磨削加工中心在德國Mikromat公司亮相并被成功推廣。美國Hexel公司研制的P2000型5坐標數控銑床,可用于銑削、磨削等加工工序。由ICAM技術(shù)公司和哈爾濱量具刃具集團共同研發(fā)制造的配備了西門(mén)子840D控制器的LINKS-EXE700并聯(lián)機床。再到目前的工業(yè)機器人,也陸續出現了并聯(lián)機構的身影,如IRB360型工業(yè)機器人,由ABB公司研制,其優(yōu)點(diǎn)是操作響應速度快且承載能力強,同時(shí)體積小巧,得到了廣泛應用。本世紀初出現的Z3并聯(lián)動(dòng)力頭和Tricept混聯(lián)機械手也已投入實(shí)際使用。
隨著(zhù)工業(yè)機器人及各行業(yè)應用需求的加大,工業(yè)機器人本體的工作速度及精度、結構剛度和穩定性等性能要求也面臨著(zhù)極大挑戰,這也使得并聯(lián)機構更加受到青睞。這也得益于并聯(lián)機構和傳統串聯(lián)機構存在互補的作用,主要是在以下幾個(gè)方面:均為閉鏈式機構,可采用連桿傳動(dòng)形式,驅動(dòng)原件可安裝在機架或靠近機架處,使得整體結構緊湊,剛度高,承載能力強以及穩定性好,且輸出端誤差不存在線(xiàn)性累積,精度高,機構響應速度快,動(dòng)態(tài)性能良好。但是也同樣存在自身缺陷,如工作空間小,機構奇異位形多,極易發(fā)生奇異,尤其是在機構的控制方面較為復雜。
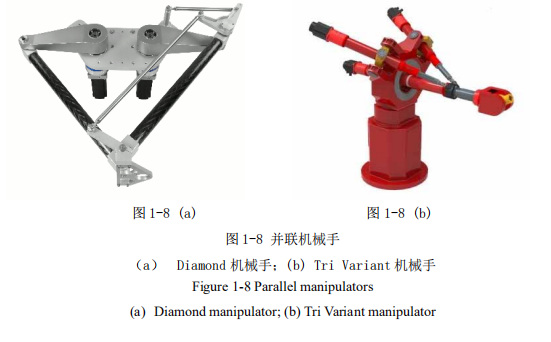
為此,又出現了一批少自由度并聯(lián)機構,此類(lèi)少自由度并聯(lián)機構主要為自由度數在2至5間的并聯(lián)機構,這種并聯(lián)機構在構造方面也較為簡(jiǎn)單,相應的制造、維護、保養成本也較低,控制也相對容易,同時(shí)也具有高速高剛度大范圍等優(yōu)勢,更加適于面向工程實(shí)際,典型的如Diamond機械手、TriVariant機械手等等。
針對少自由度并聯(lián)機構展開(kāi)的研究主要包括構型綜合、運動(dòng)學(xué)、動(dòng)力學(xué)、軌跡控制等多個(gè)方面。其中對并聯(lián)機構的型綜合主要分為三種,分別是李代數的綜合理論、運動(dòng)綜合理論和約束綜合理論,主要代表性研究有Hervé應用李代數的理論通過(guò)對機構的結構分析、設計研究綜合的3自由度機器人具有純移動(dòng)能力[21];楊廷力[22-23]等人采用序單開(kāi)鏈法綜合出了29種新型三平移并聯(lián)機構,50種新型三平移-轉動(dòng)并聯(lián)機構和49中新型三平移兩轉動(dòng)并聯(lián)機構;趙鐵石、黃真和李秦川[24~26]等人基于運動(dòng)螺旋、約束螺旋、反螺旋和螺旋系線(xiàn)性相關(guān)性等概念提出一種螺旋法理論用來(lái)綜合少自由度并聯(lián)機構等。相對于機型較豐富的六自由度完全并聯(lián)機構而言,少自由度并聯(lián)機構的構型還有待完善,研究的模型還較少,尤其是面向工程實(shí)際的少自由度并聯(lián)機構更是少之又少,這也已成為目前機構學(xué)研究的熱點(diǎn)及難點(diǎn),因此其研究具有很大空間和前景。
對并聯(lián)機構的運動(dòng)學(xué)分析主要包括機構自由度分析、位置正逆解、速度和加速度分析、奇異位形分析、工作空間分析以及性能分析等,目前的主流分析方法為Ball提出的螺旋理論,而黃真教授致力于螺旋理論的應用研究并做出了巨大貢獻,創(chuàng )立了基于反螺旋理論識別"過(guò)約束"的自由度原理,提出修正的Grübler-Kutzbach公式解決了困擾機構學(xué)150余年的自由度求解的歷史問(wèn)題[27].此外,一些學(xué)者也對并聯(lián)機構運動(dòng)學(xué)進(jìn)行了分析,如ZhangChen[28]等和LiuShan-Zeng等[29]分別對一種2自由度并聯(lián)機構和3自由度并聯(lián)機構進(jìn)行了分析;汪滿(mǎn)新[30]等人基于運動(dòng)分析,采用旋量理論得到3-SPR并聯(lián)機構的齊次量綱全雅克比矩陣,并基于該矩陣進(jìn)行機構的運動(dòng)學(xué)性能評價(jià),揭示了評價(jià)指標受機構尺度參數影響的規律;王唱,趙鐵石[31]等針對少自由度并聯(lián)機構的運動(dòng)學(xué)建模問(wèn)題,提出了一種具有通用性的方法,通過(guò)矩陣QR分解進(jìn)行機構位置解、末端速度和加速度及一、二階約束矩陣等運動(dòng)學(xué)分析;MassimilianoSolazzi等[32]
對一種4-UPU并聯(lián)機構的運動(dòng)學(xué)和奇異位形進(jìn)行了研究;沈惠平等[33]闡述了機構結構降耦原理及降耦設計方法,在此基礎上提出了一種機構運動(dòng)解耦性判斷方法,此方法基于Pro/E-ADAMS仿真運動(dòng)曲線(xiàn)建立而無(wú)需進(jìn)行機構位置求解,對并聯(lián)機構的拓撲結構優(yōu)化和性能改善有顯著(zhù)提高。另一方面,動(dòng)力學(xué)主要研究并聯(lián)機構處于不同運動(dòng)狀態(tài)下所受作用力大小,最基本最重要的是先要對機構的動(dòng)力學(xué)模型進(jìn)行建模,當下比較系統、完善的動(dòng)力學(xué)建模方法主要有三種,分別是拉格朗日法、虛功原理法以及牛頓-歐拉法。如田延嶺,張大衛[34]等運用拉格朗日法建立了磨頭一砂輪一微定位工作臺組成系統在磨削過(guò)程模態(tài)坐標下的動(dòng)力學(xué)模型,并對其展開(kāi)分析;山顯雷,程剛[35]采用牛頓-歐拉法建立了3SPS+1PS并聯(lián)機構的顯式動(dòng)力學(xué)模型,此模型考慮了關(guān)節摩擦并簡(jiǎn)化了建模過(guò)程;賈曉輝,田延嶺,張大衛[36]基于虛功原理對3-RRPR柔性精密定位工作臺進(jìn)行了動(dòng)力學(xué)分析;此外,一些學(xué)者也采用其他一些方法對并聯(lián)機構的動(dòng)力學(xué)展開(kāi)了眾多研究,如曲海波等[37]提出一種能夠增加球面并聯(lián)機構的承載能力的4-RRS冗余球面并聯(lián)機構并建立其靜力學(xué)模型,采用實(shí)例求解方式得到了機構各支鏈關(guān)節的受力和變形情況,將冗余與非冗余機構的剛度與受力性能進(jìn)行比較;丁華鋒等[38]采用凱恩方法對一種新型正鏟液壓挖掘裝載裝置進(jìn)行了動(dòng)力學(xué)分析,通過(guò)驅動(dòng)力和關(guān)節轉矩的等效轉化處理建立了其數學(xué)模型,在空載及施加變阻力工況下對其進(jìn)行了MATLAB動(dòng)力學(xué)仿真研究。
1.4研究背景與意義
目前,在日、韓、美等發(fā)達國家均已將機器人及自動(dòng)化技術(shù)放在科學(xué)研究的首位,尤其是在造船領(lǐng)域。隨著(zhù)全球造船中心東移,世界90%以上的市場(chǎng)份額已由韓、中、日三國的船舶企業(yè)占據。尤其是近年來(lái),全球船舶行業(yè)蓬勃發(fā)展加上政府的大力支持,我國船舶工業(yè)迎來(lái)了發(fā)展的春天,訂單量和年造船產(chǎn)量均急速增加,在全球已經(jīng)處于領(lǐng)先地位[39-40].而船舶由于自身龐大且復雜的結構特性致使船舶焊接也成為目前世界上工作量最大且效率低、操作復雜的焊接工作。船舶焊接技術(shù)作為船舶建造過(guò)程中的主要技術(shù)之一,其工作量已占船舶建造總工作量的40%以上,也是創(chuàng )立現代造船模式的重要撐持技術(shù)。在我國,各大造船企業(yè)平均焊接效率均已超過(guò)90%,但仍舊以人工焊接為主,主要有工作量大、環(huán)境惡劣、焊接難度大、效率低下、質(zhì)量難以保證等一系列問(wèn)題[41-43],其機械自動(dòng)化效率遠不足20%,而在日本和韓國采用焊接自動(dòng)化的造船企業(yè)已達80%,尤其是CO2氣體保護焊機得到了廣泛采用。因此,船舶焊接已直接影響到造船的質(zhì)量以及船舶制造的產(chǎn)量與成本,船舶自動(dòng)化焊接的發(fā)展對造船行業(yè)的未來(lái)走向具有舉足輕重的含義。
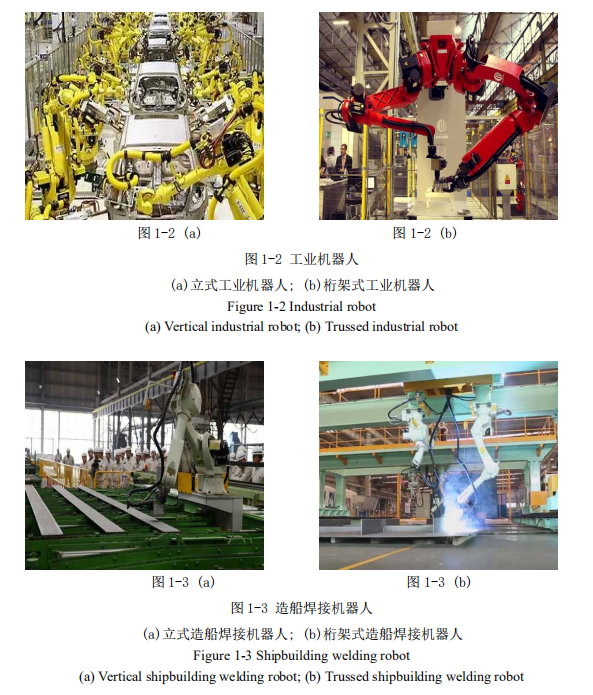
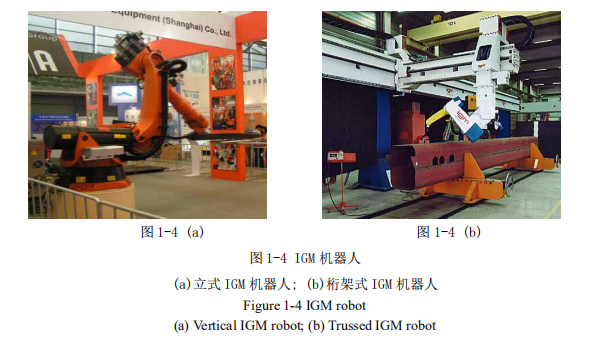
其中船舶建造過(guò)程中的焊接工作主要體現在船舶小合攏、中合攏和大合攏階段以及船舶內部各艙室、各管道及法蘭間等大型零部件的拼接,其建造階段的劃分如表1-1所示,各個(gè)階段均體現出焊接的重要性。一直以來(lái),焊接機器人憑借其優(yōu)異的焊接質(zhì)量和高效的工作效率在各行各業(yè)中嶄露頭角。隨著(zhù)機械行業(yè)的不斷發(fā)展,陸續出現了一批造船焊接機械[44],已在各類(lèi)船舶建造有效發(fā)揮焊接、噴涂等功能中有了初步的成效。但是,現有的船舶焊接機器人不管是立式焊接機器人還是龍門(mén)式焊接機器人,均為串聯(lián)結構的開(kāi)鏈式關(guān)節型機器人,驅動(dòng)電機分布于各個(gè)關(guān)節上,隨著(zhù)電機的疊加會(huì )導致機械臂笨重,承載能力差,機構末端執行器運動(dòng)慣量大、累積誤差大、動(dòng)力學(xué)性能不佳等問(wèn)題[45],特別是在流體載荷、風(fēng)載荷等激勵的港口復雜環(huán)境下,依然滿(mǎn)足不了船舶高精度高強度焊接的要求。然而目前針對船舶焊接機器人展開(kāi)的研究工作多是集中在對傳統串聯(lián)結構的焊接機器人的軌跡識別與誤差補償[46-47]、焊縫跟蹤[48-49]、焊槍姿態(tài)調教[50]以及相應控制硬件與算法[51-53]等方面,針對機器人本體結構在機構學(xué)層面開(kāi)展的研究還鮮見(jiàn)報道。

而多自由度可控機構是機械技術(shù)與電子技術(shù)有機結合的產(chǎn)物[54],由若干個(gè)機構和驅動(dòng)元件組成,多個(gè)驅動(dòng)元件共同作用決定其輸出運動(dòng),是多自變量的函數。
通過(guò)計算機軟件編程控制原動(dòng)件電機的角位移和轉速控制機構實(shí)現復雜軌跡輸出,只需通過(guò)調整程序便可改變輸出軌跡,即所謂的輸出具有柔性化。且驅動(dòng)電機均可安裝于機架上,避免了傳統串聯(lián)的開(kāi)鏈式機構各電機安裝于鉸鏈處因電機累積疊加導致的誤差大、末端運動(dòng)慣量大、承載能力不足等缺陷,針對此類(lèi)機構展開(kāi)的研究也得到了足夠的重視,如混合驅動(dòng)機構的研究與未來(lái)發(fā)展趨勢[55];新型多自由度可控裝載機的構型設計及應用研究[56-60];平面多自由度可控挖掘機構的動(dòng)力學(xué)與控制器的研究[61];基于可控機構的新型碼垛機器人的運動(dòng)學(xué)與動(dòng)力學(xué)研究[62-64]等等。然而此類(lèi)面向工程實(shí)際的機構研究任是冰山一角,尤其是面向造船焊接機器人領(lǐng)域幾乎從未踏足。


為此,結合多自由度可控機構和并聯(lián)機構對船舶焊接機器人機構進(jìn)行研究,設計一種基于多自由度可控閉鏈結構的船舶焊接機器人機構,其中閉鏈結構各電機均安裝在機架上,采用外轉動(dòng)副驅動(dòng)閉鏈連桿傳動(dòng)形式,各傳動(dòng)桿可制成輕桿,末端串聯(lián)傳統焊槍姿態(tài)調整裝置,整機具有高穩定性、末端運動(dòng)慣量小、累積誤差小、剛度性能好等優(yōu)勢,能較好適用于大范圍高強度的船舶建造焊接工作。
1.5本文主要研究?jì)热?/strong>
本文針對現階段造船焊接領(lǐng)域的焊接機器人機構存在的不足,如由于傳統串聯(lián)的開(kāi)鏈式結構引起的累積誤差大、末端運動(dòng)慣量大、剛度低以及穩定性差等缺點(diǎn),引入多自由度可控機構進(jìn)行閉鏈式造船焊接機器人機構的構型綜合并結合變胞機構提出面向造船焊接作業(yè)任務(wù)的機器人機構。對一種閉鏈式機構進(jìn)行運動(dòng)學(xué)分析、剛體動(dòng)力學(xué)及剛度分析,結合具體仿真軌跡驗證該機構的合理性與實(shí)際可行性。全文分為六章,具體章節如下:
第一章:緒論。介紹國內外造船焊接機器人的發(fā)展概況以及并聯(lián)機構的研究歷程,了解未來(lái)造船焊接機械發(fā)展趨勢。對多自由度可控機構進(jìn)行闡述,將其引入造船焊接領(lǐng)域,明確當下發(fā)展造船焊接機器人新機構的重要意義。對本文主要研究?jì)热葸M(jìn)行了概述。
第二章:閉鏈式造船焊接機器人機構構型綜合與拓撲結構分析。明確機構的創(chuàng )新設計方法,基于傳統造船焊接機器人機構的功能分析,結合再生運動(dòng)鏈法和基礎閉環(huán)子結構替換法進(jìn)行焊接機構的構型綜合。將變胞機構應用于造船焊接領(lǐng)域,提出一種具有變拓撲結構功能的造船焊接機器人機構,通過(guò)雙色拓撲圖與鄰接矩陣對機構進(jìn)行拓撲分析,得到其變胞原理及構態(tài)演化過(guò)程,結合自由度計算明確機構面向不同作業(yè)任務(wù)的有效構態(tài)。
第三章:閉鏈式造船焊接機器人機構運動(dòng)學(xué)分析。對一種閉鏈式造船焊接機器人機構進(jìn)行剖析,得到構型組成原理,分析其自由度。基于閉環(huán)矢量法進(jìn)行機構的位置正、逆解;通過(guò)速度分析得到雅克比矩陣,確定機構的奇異位形并結合工程實(shí)際求解機構工作空間,對機構進(jìn)行性能分析。
第四章:閉鏈機構動(dòng)力學(xué)建模與剛度分析。對造船焊接機器人的閉鏈機構進(jìn)行動(dòng)態(tài)靜力學(xué)分析以及剛體動(dòng)力學(xué)建模,可為后續驅動(dòng)電機的選取以及閉環(huán)控制系統的設計與研究提供參考。進(jìn)行閉鏈機構的剛度分析,得到機構相關(guān)特性。
第五章:閉鏈機構軌跡仿真分析。通過(guò)PROE進(jìn)行閉鏈機構三維建模,將其導入ADAMS中設置好約束并進(jìn)行軌跡仿真。通過(guò)正、逆向運動(dòng)學(xué)仿真給出輸入端與輸出端的相關(guān)運動(dòng)學(xué)特性曲線(xiàn),分析對應軌跡與特性曲線(xiàn)驗證機構的合理性與實(shí)際可行性。
第六章:總結與展望。對全文進(jìn)行總結,提出文中不足之處以及需繼續深入研究方面,對閉鏈式造船焊接機器人機構的未來(lái)研究與發(fā)展進(jìn)行展望。
第二章 閉鏈式造船焊接機器人機構構型綜合與拓撲結構分析
2.1 概述
2.2 創(chuàng )新設計
2.3 構型綜合
2.3.1 再生運動(dòng)鏈法
2.3.2 基礎閉環(huán)子結構替換法
2.4 構型綜合具體化實(shí)例
2.5 變拓撲結構造船焊接機器人機構
2.6 構態(tài)拓撲分析及自由度計算
2.6.1 自由焊接構態(tài)(變胞源機構)
2.6.2 局部焊接構態(tài)(構態(tài) 1)
2.6.3 平焊及立焊構態(tài)(構態(tài) 2)
2.6.4 無(wú)效構態(tài)(構態(tài) 3)
2.7 本章小結
第三章 閉鏈式造船焊接機器人機構運動(dòng)學(xué)分析
3.1 引言
3.2 構型組成原理與自由度分析
3.3 位置正解
3.3.1 四桿機構
3.3.2 五桿機構
3.3.3 偽四桿機構
3.3.4 串并混聯(lián)機構
3.3.5 數值分析
3.4 位置逆解
3.4.1 串并混聯(lián)機構
3.4.2 數值分析
3.5 速度分析與雅克比矩陣
3.6 奇異性與工作空間分析
3.6.1 奇異性
3.6.2 工作空間分析
3.6.3 算例分析
3.7 性能分析
3.8 本章小結
第四章 閉鏈機構動(dòng)力學(xué)建模與剛度分析
4.1 引言
4.2 機構動(dòng)態(tài)靜力學(xué)建模
4.3 閉鏈機構剛體動(dòng)力學(xué)建模
4.4 剛度分析
4.5 本章小結
第五章 閉鏈機構軌跡仿真分析
5.1 引言
5.2 虛擬樣機模型
5.3 正向運動(dòng)學(xué)仿真
5.4 逆向運動(dòng)學(xué)仿真
5.5 本章小結
第六章 總結與展望
6.1 總結
工程機械作為現代裝備工業(yè)的重要組成部分,已在各行各業(yè)中發(fā)揮了舉足輕重的作用。而現有的工程機械,以造船焊接機械為例,多為簡(jiǎn)單串聯(lián)的關(guān)節型機構,在滿(mǎn)足靈活性的同時(shí)也包含了串聯(lián)機構累計誤差大、末端承載力差、剛度低以及整機穩定性不足等缺陷。而多自由度可控機構是機械技術(shù)與電子技術(shù)有機結合的產(chǎn)物,具有輸出柔性化、末端承載力強、剛度高、慣量低等優(yōu)點(diǎn),雖已引起國內外學(xué)者們的廣泛研究,但針對工程實(shí)際應用的研究還鮮見(jiàn)報道,尤其是結合造船焊接機械領(lǐng)域。
針對上述問(wèn)題,本文將多自由度可控機構應用于造船焊接機械領(lǐng)域,包含的主要工作及研究成果如下:
(1)在全面分析傳統焊接機器人工作原理和輸出動(dòng)作要求的基礎上,通過(guò)工作機理的行為表達方法將其轉化為工藝過(guò)程,基于功能分析,結合多自由度可控機構以及并聯(lián)機構,運用再生運動(dòng)鏈法和平面基礎閉環(huán)子結構替換的快速成型法對造船焊接機器人機構進(jìn)行了構型綜合,得到了新型閉鏈式造船焊接機器人機構,并在諸多構型中給出了 4 種造船焊接具體化實(shí)例。將變胞機構應用于造船焊接機械領(lǐng)域,推進(jìn)變胞機構面向任務(wù)的實(shí)用化,設計了一種新型變拓撲結構的焊接機器人機構,利用雙色拓撲圖和鄰接矩陣進(jìn)行了拓撲分析,得到了其閉鏈機構的變胞原理,揭示了其構態(tài)演化過(guò)程。通過(guò)修正的 Grübler-Kutzbach 公式對各構態(tài)進(jìn)行了自由度分析,得到其具有三種有效構態(tài),可結合末端焊槍姿態(tài)調整裝置完成多種焊接作業(yè)。
(2)基于 Assur 桿組以及李群理論對綜合出的一種閉鏈式造船焊接機器人機構進(jìn)行了機構構型組成原理及自由度分析,得出其由一個(gè)主動(dòng)件和一個(gè)Ⅱ級Assur 桿組以及二個(gè)擴展Ⅱ級 Assur 桿組依次組合而成,具有平面內兩移動(dòng)自由度和繞該平面法線(xiàn)的一轉動(dòng)自由度,其末端輸出軌跡由此三自由度組合而成;構建了機構的運動(dòng)學(xué)分析框圖并采用閉環(huán)矢量法建立了約束方程來(lái)進(jìn)行機構的位置求解,通過(guò)數值分析驗證了數學(xué)模型的正確性;由速度分析得到了雅克比矩陣,采用雅克比矩陣法并結合具體尺度參數給出了機構的奇異位形;結合工程實(shí)際將其主動(dòng)構件運動(dòng)范圍控制在部分奇異位形內,在無(wú)奇異條件下求解了機構的實(shí)際工作空間。將其與同尺度條件下的二自由度閉鏈機構對比,表明該三自由度閉鏈機構不僅增大了實(shí)際工作范圍,在完成定位的同時(shí)還具有姿態(tài)調整功能,完全能夠滿(mǎn)足造船焊接作業(yè)所需;基于機構末端點(diǎn)輸出位置的速度雅克比矩陣,采用條件數的倒數和可操作度及最小奇異值指標對機構進(jìn)行了性能分析,整體性能良好且穩定,局部性能較為優(yōu)越。
(3)基于閉鏈機構的運動(dòng)學(xué)分析結果,根據達朗貝爾原理對機構采用動(dòng)態(tài)靜力分析法進(jìn)行了各桿件受力分析并列出了其平衡方程,得到各輸入構件的輸入力矩以用于求解輸入功率,對后續伺服電機的選取提供了一定的參考。通過(guò)拉格朗日法對閉鏈機構進(jìn)行剛體動(dòng)力學(xué)建模,并進(jìn)行了機構的剛度分析,明確了影響機構動(dòng)態(tài)性能的變量以及機構所受外力、機構內部以及位姿對機構剛度的影響,也可為后續針對閉環(huán)控制系統的設計與研究提供必要的依據。
(4)在 PROE 中建立了閉鏈機構的虛擬樣機模型,將其導入 ADAMS 中,施加各約束條件,進(jìn)行了機構正、逆向運動(dòng)學(xué)仿真分析,根據多種軌跡仿真和運動(dòng)特性曲線(xiàn)驗證其具有柔性輸出且軌跡多樣化,期間各主動(dòng)臂輸入變化均較為平緩無(wú)劇烈突變,末端輸出符合實(shí)際焊接運動(dòng)規律,表明機構能夠完成常規以及特殊造船焊接任務(wù)。
6.2 展望
本文對閉鏈式造船焊接機器人機構進(jìn)行了構型綜合研究,并以其中一種構型為例進(jìn)行了機構運動(dòng)學(xué)、動(dòng)力學(xué)和仿真軌跡研究。由于本人時(shí)間和水平有限,對于本文中該機構仍有較多之處需進(jìn)一步研究與完善:
(1)構型綜合:構型綜合一直是多自由度可控機構與并聯(lián)機構研究的重點(diǎn)和難點(diǎn),尤其是面向工程應用的實(shí)用型構型,后續可歸納總結出更加系統、完善的型綜合法,使綜合出的構型更加系列化。
(2)尺度優(yōu)化:合理的機構尺度綜合和優(yōu)化能保證機構較好的工作性能,尤其是面向工程實(shí)際的機械產(chǎn)品,為此需進(jìn)一步研究。
(3)動(dòng)力學(xué):本文只對機構進(jìn)行了簡(jiǎn)單的動(dòng)力學(xué)建模,具體結合工程實(shí)際,考慮彈性變形及港口結合風(fēng)、洋流等多重載荷下的耦合動(dòng)力學(xué)方面的研究還未涉足,還需進(jìn)一步理論建模分析并結合實(shí)際樣機進(jìn)行實(shí)驗。
(4)精度方面:與傳統串聯(lián)結構的造船焊接機器人機構進(jìn)行對比,研究機構在結構本體上精度的提高程度。
參考文獻
[1] 于步江。 船艙格子間機器人焊接工藝研究[D]. 江蘇科技大學(xué), 2013.
[2] Haugland, Bjorn K. (DNV)。 Facing the Technology Frontier[J]. Shipping World andShipbuilder, 2006,207(4226): 68-72.
[3] Sugitani, Yuji. The technical trends and the future prospective of theshipbuilding industries in Japan[J]. Welding in the World,2004, 48(SPEC):173-184.
[4] 楊源帆。 機器人在造船工業(yè)中的應用[J]. 造船技術(shù), 2003, (3): 1-3.
[5] Chang-Sei Kim, Keum-Shik Hong, Yong-Sub Han. Welding Robot Applications inShipbuilding Industry: Off-Line Programming, Virtual Reality Simulation, andOpen Architecture[J]. Industrial Robotics: Programming, Simulation andApplication, ISBN 3-86611-286-6, Germany, 2006, 12: 537-558.
[6] Chang-Sei Kim, Keum-Shik Hong, Hans Yong-Sub Han etc. PC-Based Off-LineProgramming using VRML for Welding Robots in Shipbuilding[J]. Proceedings ofthe 2004 IEEE, Conference on Robotics, Automation and Mechatronics, Singapore,1-3 December, 2004: 949-954.
[7] 張東華。 我國船舶焊接工藝技術(shù)與發(fā)展[J]. 造船技術(shù), 2012, 5(01), 101-206.
[8] 陳家本。 歐洲造船焊接自動(dòng)化的一些方法[J]. 電焊機。 2007, 37(1): 15.
[9] Boekholt, Richard. The technical trends and future prospects for Europeanshipbuilding[J]. Welding in the World. 2004, 48(SPEC): 157~172.
[10] 郭亮。 移動(dòng)機器人不連續焊縫跟蹤技術(shù)研究[D]. 南昌大學(xué), 2017.
[11] 呂健, 呂學(xué)勤。 焊接機器人軌跡跟蹤研究現狀[J]. 機械制造文摘, 2017, (01):18-22.
[12] 張軻。 移動(dòng)焊接機器人坡口自尋跡位姿調整的軌跡規劃[J]. 機械工程學(xué)報, 2005,(05): 16-19.
[13] 許宗陽(yáng)。 船用中型管-管、管-法蘭機器人焊接系統研究[D]. 江蘇科技大學(xué), 2012.
[14] 高飛, 嚴鏗, 鄒家生。 焊接機器人在船舶工業(yè)中的應用[J]. 江蘇船舶。 2009, 26(3):41-44.
[15] Gwinnett J. E. Amusement devices[P]. US Patent No. 1789680, January 20, 1931.
[16] Pollard W L. G. Spray painting machine[P]. US Patent No. 2, 213, 108, August26, 1940.
[17] V. E. Gough, S. G. Whitehall. Universal tire test machine[C]. Proceedings ofthe FISITA Ninth International Technical Congress, 1962: 117-137.
[18] Capple K L. Motion simulator[P]. US Patent No. 3, 295, 224, January 3, 1967.
[19] K. H. Hunt. Kinematic geometry of mechanisms[C]. Oxford University Press, 1978:304-374.
[20] Clavel R. Delta, A fast robot with parallel geometry[J]. Pro. Int. Symposiumon Industrial Robots, 1988: 91-100.
[21] Hervé J M. The Lie group of rigid body displacements, a fundamental tool formechanism design. Mechanism and Machine Theory, 1999, 34: 719-730.
[22] 楊廷力, 金瓊。 基于單開(kāi)鏈單元的三平移并聯(lián)機器人機構型綜合及其分類(lèi)[J]. 機械工程學(xué)報, 2002, 38(8)。
[23] 楊廷力。 基于單開(kāi)鏈單元的三平移并聯(lián)機器人機構型綜合的一般方法[J].機械科學(xué)與技術(shù), 2001, 321-325.
[24] 趙鐵石。 空間少自由度并聯(lián)機器人機構分析與綜合的理論研究[D]. 秦皇島:燕山大學(xué),2000.
[25] Huang Z,Li Q C. General Methodology for Type Synthesis of Lower-MobilitySymmetrical Parallel Manipulators and Several Novel Manipulators.International Journal of Robotics Research, 2002, 21(2)。
[26] 黃真, 李秦川。 少自由度并聯(lián)機器人機構的型綜合原理[J]. 中國科學(xué)(E 緝), 2003,33(9)。
[27] 黃真, 趙永生, 趙鐵石。 高等空間機構學(xué)[M]. 北京: 高等教育出版社,2014.
[28] Zhang C, Zhang L Y. Kinematics Analysis and Workspace Investigation of a Novel2-DOF Parallel Manipulator Applied in Vehicle Driving Simulator[J]. Roboticsand Computer-Integrated Manufacturing, 2013, 29(4): 113-120.
[29] Liu S Z, Zhu Z C. Kinematics and Dynamics Analysis of a three-DOF parallelmanipulator[J]. Journal of Central South University, 2014, 21(7): 2660-2666.
[30] 汪滿(mǎn)新, 劉海濤, 黃田。 3-SPR 并聯(lián)機構運動(dòng)學(xué)性能評價(jià)[J]. 機械工程學(xué)報, 2017,53(05): 108-115.
[31] 王唱, 趙鐵石, 趙延治, 耿明超, 李二偉。 基于 QR 分解的少自由度并聯(lián)機構運動(dòng)學(xué)及剛度分析[J]. 機械工程學(xué)報, 2015, 51(23): 28-35.
[32] Massimiliano S. Kinematics Analysis and Singularity Loci of a 4-UPU ParallelManipulator[J]. Advances on Theory and Practice of Robots and Manipulators, 2014,22(1): 103-111.
[33] 沈惠平, 李菊, 王振, 孟慶梅, 戴麗芳。 基于結構降耦和運動(dòng)解耦的并聯(lián)機構拓撲結構優(yōu)化及其性能改善[J]. 機械工程學(xué)報, 2017, 53(19): 176-186.
[34] 田延嶺, 張大衛, 陳華偉, 黃田。 基于微定位工作臺的精密磨削過(guò)程動(dòng)力學(xué)建模與誤差補償技術(shù)[J]. 機械工程學(xué)報, 2005(04): 168-173.
[35] 山顯雷, 程剛。 考慮關(guān)節摩擦的 3SPS+1PS 并聯(lián)機構顯式動(dòng)力學(xué)建模研究[J]. 機械工程學(xué)報, 2017, 53(01): 28-35.
[36] 賈曉輝, 田延嶺, 張大衛。 基于虛功原理的 3-RRPR 柔性精密定位工作臺動(dòng)力學(xué)分析[J]. 機械工程學(xué)報, 2011, 47(01): 68-74.
[37] 曲海波, 梁藝瀚, 方躍法, 周益林。 4-RRS 冗余球面并聯(lián)機構的靜力學(xué)與剛度分析[J].機械工程學(xué)報, 2015, 51(11): 8-15.
[38] 丁華鋒, 劉征, 劉帥, 王成龍。 一種新型正鏟液壓挖掘裝置的運動(dòng)學(xué)和動(dòng)力學(xué)分析[J].機械工程學(xué)報, 2015, 51(1): 60-68.
[39] 李儼兒。 焊接自動(dòng)化的"冰與火之歌"[J]. 中國船舶報, 2016, (7): 1-2.
[40] 郭亮。 移動(dòng)機器人不連續焊縫跟蹤技術(shù)研究[D]. 南昌大學(xué), 2018.
[41] S.W. Kang, H.J. Youn, D.H. Kim, K.U. Kim, S.B. Lee, S.Y. Kim, S.H. Kim.Development of multi welding robot system for sub assembly in shipbuilding. IFACProceedings Volumes Volume 41, Issue 2, 2008, Pages 5273-5278.
[42] Inami S, Ono H, Takahashi M. Development of rail-less welding robot with a lasersensor for butt welding in the shipbuilding process. Mitsui Zosen Tech Rev 1999;166: 34-8.
[43] Lee Ji-hyoung, Kim Jong-jun, Kim Jae-kwon, and Park Jong-ryon. Development ofcarriage-type welding robot for double hull assembly line in shipbuilding. In:Proceedings of the 17th world congress, the international federation ofautomatic control. Seoul, Korea; July 6-11, 2008. P.4310-4311.
[44] Donghun Lee. Robots in the shipbuilding industry[J]. Robotics andComputer-Integrated Manufacturing 30 (2014) 442-450.
[45] M. Isaksson, C. Gosselin, K. Marlow , An introduction to utilising the redundancyof a kinematically redundant parallel manipulator to operate a gripper, Mech.Mach. Theory 101 (7) (2016) 50-59.
[46] 夏遠強。 大型空間焊縫車(chē)載柔性機械臂跟蹤精度研究[D]. 東北石油大學(xué), 2017.
[47] 李雪琴, 蔣紅海, 殷國富, 胡曉兵。 多關(guān)節焊接機器人軌跡誤差補償解耦分析[J]. 焊接學(xué)報, 2013, 34(10): 63-66+116.
[48] Amruta Rout, B.B.V.L. Deepak, B.B. Biswal. Advances in weld seam trackingtechniques for robotic welding: A review. Robotics and Computer IntegratedManufacturing 56 (2019) 12-37.
[49] L. Nele, E. Sarno, A. Keshari, An image acquisition system for real-time seamtracking, Int. J. Adv. Manufact. Technol. 69 (9-12) (2013) 2099-2110.
[50] 周律, 蔡錦達, 錢(qián)煒, 陳善本。 弧焊機器人焊槍姿態(tài)的簡(jiǎn)便示教[J]. 機械工程學(xué)報,2010, 46(08): 73-77.
[51] L. IRu-xiong. Design and Realization of 3-DOF Welding Manipulator Control SystemBased on Motion Controller. Energy Procedia Volume 14, 2012, Pages 931-936.
[52] Olivier Kermorgant. A magnetic climbing robot to perform autonomous welding inthe shipbuilding industry[J]. Robotics and Computer Integrated Manufacturing53 (2018) 178-186.
[53] Doyoung Chang, Donghoon Son, Jungwoo Lee, Donghun Lee, Tae-wan Kim, Kyu-YeulLee, JongwonKim. A new seam-tracking algorithm through characteristic-pointdetection for a portable welding robot. Robotics and Computer-IntegratedManufacturing Volume 28, Issue 1, February 2012, Pages 1-13.
[54] 鄒慧君, 李瑞琴, 郭為忠, 等。 機構學(xué) 10 年來(lái)主要研究成果和發(fā)展展望[J]. 機械工程學(xué)報, 2003, 39(12): 22-30.
[55] 李瑞琴, 王英, 王明亞, 趙耀虹, 宋杰。 混合驅動(dòng)機構研究進(jìn)展與發(fā)展趨勢[J]. 機械工程學(xué)報, 2016, 52(13): 1-9.
[56] 蔡敢為, 潘宇晨, 王紅州, 戴建生。 基于功能分析的新型裝載機構型綜合研究[J]. 機械工程學(xué)報, 2014, 50(11): 50-59.
[57] 張林。 新型可控裝載機構設計理論與應用研究[D]. 廣西大學(xué), 2015.
[58] 潘宇晨。 多自由度可控機構式新型工程機械設計理論與方法研究[D]. 廣西大學(xué),2013.
[59] 張林, 蔡敢為, 朱凱君, 李俊明, 王小純。 可控裝載機構的運動(dòng)學(xué)分析與仿真[J]. 機械設計, 2017, 34(02): 7-11.
[60] 張林, 蔡敢為, 朱凱君, 李俊明, 王小純。 基于圖論的可控裝載機構構型設計及其應用[J]. 中國機械工程, 2016, 27(04): 488-493+502.
[61] 潘宇晨, 蔡敢為, 吳篤超, 張金玲, 高德中。 平面三自由度可控挖掘機構動(dòng)力學(xué)建模與控制器設計[J]. 動(dòng)力學(xué)與控制學(xué)報, 2014, 12(01): 67-73.
[62] 張金玲。 新型可控碼垛機器人機構運動(dòng)學(xué)與動(dòng)力學(xué)研究[D]. 廣西大學(xué), 2013.
[63] 陳輝慶, 王汝貴。 新型可控變胞式碼垛機器人機構動(dòng)態(tài)優(yōu)化[J]. 機械設計與研究,2017, 33(05): 16-20.
[64] 王汝貴, 陳輝慶, 戴建生。 新型可控變胞式碼垛機器人機構動(dòng)態(tài)穩定性研究[J]. 機械工程學(xué)報, 2017, 53(13): 39-47.
[65] 鄒慧君, 顏鴻森。 機械創(chuàng )新設計理論與方法[M]. 北京: 高等教育出版社, 2008.
[66] 郭正強, 潘宇晨, 袁雪鵬。 基于功能分析的船用克令吊執行機構構型綜合[J]. 裝備制造技術(shù), 2018(12): 1-4+17.
[67] 楊廷力。 機械系統基本理論[M]. 北京: 機械工業(yè)出版社, 1996.
[68] 高德中。 具有變胞功能的新型人力驅動(dòng)甘蔗裝載機構設計與研究[D]. 廣西大學(xué),2014.
[69] 王建亮。 新型三自由度可控機構創(chuàng )新設計[D]. 廣西大學(xué), 2013.
[70] Xingyu Zhao, Tieshi Zhao, Chang Wang, Xin Tian, Yuhang Chen. Type synthesis andanalysis of parallel mechanisms with sub-closed-loops[J]. Mechanism and MachineTheory, 120 (2018) 140-165.
[71] J. S. Dai, J. Rees Jones. Mobility in Metamorphic Mechanisms of Foldable/Erectable Kinds[J]. Transaction of the ASME, Journal of Mechanical Design, 1999,121(3): 375-382.
[72] 張利萍, 戴建生, 楊廷力, 龐桂兵, 楊林。幾何約束驅動(dòng)的可重構位移子群建模理論[J]. 機械工程學(xué)報, 2014, 50(7): 23-31.
[73] 楊強, 王洪光, 李樹(shù)軍, 戴建生。含變胞運動(dòng)副結構的約束變胞機構構型綜合[J]. 機械工程學(xué)報, 2014, 50(13): 1-8.
[74] 潘宇晨, 蔡敢為, 王紅州, 高德中, 戴建生。 具有變胞功能的電動(dòng)裝載機構構態(tài)進(jìn)化拓撲結構分析與基因建模[J]. 機械工程學(xué)報, 2014, 50(1): 38-46.
[75] 黃真, 趙永生, 趙鐵石。 高等空間機構學(xué)[M]. 北京: 高等教育出版社, 2008.
[76] 潘宇晨, 蔡敢為, 張轉, 李小清, 張金玲。 新型可控挖掘機構運動(dòng)學(xué)建模與工作空間分析[J]. 廣西大學(xué)學(xué)報(自然科學(xué)版), 2013, 38(02): 256-262.
[77] 李樹(shù)軍, 戴建生。 基于擴展 Assur桿組的變胞機構組成原理[J]. 機械工程學(xué)報, 2010,46(13): 22-30+41.
[78] L.M. Xu, Q.H. Chen, L.Y. He, Q.C Li. Kinematic analysis and design of a novel3T1R 2-(PRR) 2 RH hybrid manipulator. Mechanism and Machine Theory 112 (2017)105-122.
[79] Q.C. Li, Z. Huang, J.M. Hervé, Type synthesis of 3R2T 5-DOF parallel mechanismsusing the Lie group of displacements, IEEE Trans. Robot. Autom. 20 (2) (2004)173-180.
[80] 于靖軍, 劉辛軍, 丁希侖, 戴建生。 機器人機構學(xué)的數學(xué)基礎[M]. 北京: 機械工業(yè)出版社, 2008.
[81] 汪滿(mǎn)新, 劉海濤, 黃田。 3-SPR并聯(lián)機構運動(dòng)學(xué)性能評價(jià)[J]. 機械工程學(xué)報, 2017,53(5): 108-115.
[82] J. A. Saglia, N. G. Tsagarakis, J. S. Dai, D. G. Caldwell. A High-performanceRedundantly Actuated Parallel Mechanism for Ankle Rehabilitation. TheInternational Journal of Robotics Research, Vol. 28, No. 9, September 2009, pp.
1216-1227.
[83] Mustafa J. Hayawi, A.A. Mat Isa, 1M. Azhan Anuar, 1Abdul Rahman Omar. Kinematicand Dexterity Analysis of a 3-DOF Parallel Manipulator. Research Journal ofApplied Sciences, Engineering and Technology 12(2): 239-248, 2016.
[84] Ján Vavro jr, Ján Vavro, Petra Ková?iková, Radka Bezdedová。 Kinematic andDynamic Analysis of the Manipulator for Removal of Rough Tyres. ProcediaEngineering Volume 136, 2016, Pages 120-124.
[85] 劉波。 混合驅動(dòng)九連桿沖壓機構的研究與仿真分析[D]. 中北大學(xué), 2013.
[86] 王春麗。 六桿肋桿式機械壓力機的動(dòng)態(tài)靜力學(xué)與動(dòng)力學(xué)分析[D]. 山東科技大學(xué),2017.
[87] 丁鍵。 多連桿伺服壓力機主傳動(dòng)系統動(dòng)態(tài)特性研究[D]. 南京航天航空大學(xué),2014.
[88] 李有堂。 機械系統動(dòng)力學(xué)[M]. 北京: 國防工業(yè)出版社, 2010.
[89] Chen S. F, Kao I. The Conservative Congruence Transformation for Joint andCartesian Stiffness Matrices of Robotic Hands and Fingers[J]. The InternationalJournal of Robotics Research, 2000, 19(9): 835-847.
[90] 李增剛。 ADAMS入門(mén)詳解與實(shí)例[M]. 北京: 國防工業(yè)出版社, 2008.
[91] 賈長(cháng)治, 殷軍輝, 薛文星。 MD ADAMS虛擬樣機從入門(mén)到精通[M]. 北京: 機械工業(yè)出版社, 2010.
致 謝
時(shí)間如流水,轉眼即逝。三年的研究生生活接近尾聲,僅憑碩士論文收尾之際,向曾經(jīng)給予我鼓勵和幫助的人表示最真摯的謝意!
首先,我要感謝我的導師三年來(lái)對我的培養!潘宇晨老師學(xué)識淵博,精益求精的治學(xué)精神、嚴謹的科研態(tài)度、誨人不倦的工作作風(fēng)深深地感染和激勵著(zhù)我,使我不斷在科研道路上前行。同時(shí),潘老師積極向上的生活態(tài)度和幽默風(fēng)趣的指導風(fēng)格也深深影響著(zhù)我,讓我在人生道路上受益匪淺。潘老師在我論文撰寫(xiě)過(guò)程中給予了深刻的指導和幫助,不厭其煩地引導我,帶領(lǐng)我走向機構學(xué)的高雅殿堂,在此論文完成之際向潘老師表達我最誠摯的謝意!此外,潘老師還對我的日常生活關(guān)懷備至,在生活中亦是良師又是益友。
感謝北部灣大學(xué)機械創(chuàng )新協(xié)會(huì )的同學(xué)們,在我三年研究生科研工作中的幫助和支持,你們也讓我開(kāi)闊了視野,見(jiàn)識了你們的學(xué)習與創(chuàng )新能力,祝你們前程似錦,祝協(xié)會(huì )越辦越好!
感謝黃海波同學(xué),無(wú)論是科研上還是生活中都不知疲倦地幫助我,你讓我見(jiàn)識到了當代優(yōu)秀大學(xué)生的風(fēng)采!祝身體健康,早日學(xué)業(yè)有成!
感謝蔣國平、陳果、左紅明等同學(xué),是你們陪伴我度過(guò)了有意義的三年研究生生活,讓我遠離孤獨,收獲快樂(lè )!祝各位今后飛黃騰達!
感謝我的父母,感謝我的家人對我學(xué)習不斷的理解、支持和幫助,謝謝一直以來(lái)你們的關(guān)心和愛(ài)護!
感謝我的同學(xué)、朋友們,你們是我不可多得的兄弟姐妹!
此外,感謝所有此次參與答辯的專(zhuān)家老師們,能夠在百忙之中蒞臨指導,不勝感激!
(如您需要查看本篇畢業(yè)設計全文,可點(diǎn)擊全文下載進(jìn)行查看)