24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
聚變堆內部環(huán)境存在強輻射。高污染、高毒性。需要借助逼操作技術(shù)代替人完成維護工作。遙操怍系統已經(jīng)發(fā)展成為未來(lái)聚變堆-一個(gè)必不可少的子系統。 針對未來(lái)中國聚變工程試驗堆裝置,其包層維護方案采用整體維護設計,需要上部的吊裝機構和下部的多功能轉運平臺協(xié)同完成包層的轉運。在轉運之前,包層底部和真空室支撐是通過(guò)鎖緊軸銷(xiāo)連接在-起, 因此需要開(kāi)發(fā)一套用于 包層底部鎖緊軸銷(xiāo)拆裝的多功能維護機械臂系統。
針對中國未來(lái)聚變堆包層底部鎖緊軸銷(xiāo)的拆裝問(wèn)題,在充分調研國內外托卡馬克裝置包層模塊維護力案設計現狀的基礎上。設計出了能夠拆裝鎖緊軸銷(xiāo)的多功能機械臂的具體結構,并分析了其可行性:解決了冗余設計、狹小運動(dòng)空間條件下聚變堆包層底部維護機械臂結構設計、運動(dòng)學(xué)、動(dòng)力學(xué)分析及其仿真驗證間題。具體工作內容如下。
1.通過(guò)調研國內外聚變堆當前包層維護的設計方案,分析未來(lái)中國聚變工程試驗堆包層底部具體的空間尺寸,比較多種結構彩式的機械臂,設計出了三種不同結構的機械臂,對比三種結構的優(yōu)缺點(diǎn),最終選撣最合適的關(guān)節型坐標結構。
結合包層的維護實(shí)際工況需求,對機械臂底部增加移動(dòng)自由度設計:在此基礎,上。
設計了機械臂的末端執行器、執行器作用對象以及其它相關(guān)部件:井基于有限元。
軟件對機械臂結構強度進(jìn)行了有限元分析,驗證了結構的可靠性。
2.通過(guò)解析法求解出了機械臂的運動(dòng)學(xué)正。逆解和雅可比矩陣,井基于編程軟件編程驗證了正、道解的正確性:然后利用運動(dòng)學(xué)的正解。采用蒙特卡洛法得到了機械臂能夠到達的工作空間。與包層實(shí)際維護空間進(jìn)行對比,結果滿(mǎn)足要求。
3.通過(guò)揎格朗日法建立了機械臂的動(dòng)力學(xué)模型并求解了動(dòng)力學(xué)方程:基于動(dòng)力學(xué)分析軟件對機械臂進(jìn)行動(dòng)力學(xué)仿真分析,得出機械臂各關(guān)節的力和力矩變化曲線(xiàn),為電機和減速機的選型提供了理論指導,并為未來(lái)機械臂的加工制造積累了技術(shù)經(jīng)驗。
關(guān)鍵詞。中國豪變工程試驗堆;包層:維護機械臂:結構設計:運動(dòng)學(xué):動(dòng)力學(xué)

Abstract
The eaviroument inside the fusion reactor has strong radiation, high plutio andhigh toricity, s0 it is nesesay to use rermote handling tochnology to replace human tocomplete the mainenance work. Remote handling system bhas been developed into aessential subsystm of the fure fusion reactor. For the CFETR of the future fusionreactor, the owerall maintenance design was adopted into the blanket maintenancescheme.which requires the upper lifing mechanism and the lower multi-functionadtransport platform to jointy complete tbe blanket transport. Prior to transport, thebotom of the blanket is connected to the vacuum vessel support through the lockingpin, so a muli-functioal maintenance manipulator system for the removal of thelocking pin at the botom of the banket neds to be developed.
Aiming at the diasembly problem of locking shaft pin at the botom of CFETRblanke, this paper designed the conctete structure of mulifunctional manipulator thatcan disassemble locking shaft pin on the basis of flly ivesigating the status of hemainternanoe scheme design of tokamak device blanket module a domesic andoverscas sand its feasibility was analyzed. The problems of reodundant deaign, structuraldesign, kinecmatics and dyuamics analysis and sinoulatio verification of CFETRbottom maintenance manipulator wee solved under the conditioa of nartow motionspace. The specifice worck content is as fllows.
1. By investigating the current desigm scheme of blanket maintenance for fusiondevice at domestic and abroad, the specifc space size at the bottom of the blanket ofCFETR was analyzed, and vanious manipulator with dfferent structures was compared.Three manipulasors with different structures were designed, the advantages anddisadvantages of the three structures were compared, and he most appropriate jointcoordinate structure wa slected finally. Acording婦the sctual required workingcondition of the blanket, the design of increasing the mobile fredom at the bottom ofthe manipulator ws erried out. On this basis, be ed-fetore,p ffcer objects andother related components of the manipulator were designed. Based on finite elementsoftware, the finite element analysis of the manipulator structure strangth is crried outto verily the rliability of the structure.
2. Tbe forvard and inverse kinematics solutions and Jacobian matix of the manipulator were solved by analytical method, and tbe corctnes of the forward andinverse soluions was verifed by progranming software. Then, the working space thatthe manipulator can reach was obtained by Monte Carlo method using the kimematicspositive solution. Compared with tbe acual maintenance space of the blanker, theresults meet the requirements.
3. The dynamie modeal of the manipulator was establisbed by Lagrange methodand the dynamie equation was solwed. Based on the dynanic analysis sotware, thedynamie simulation analysis of the manipulator was carried out The variation curve offorce and torque of each joint of the manipulator were obaimed, which providedtheoretical guidance for the seltio of moor and reducer, and accumulaes tchnicalexperience for the fure processing and manufacturing of the manipulator for tokamakreactor.
Key Words: CFETR; Blanket; Msinenance manpulaor; Stuctural design; Kinematic;Dynamie
目錄
1緒論
隨著(zhù)人類(lèi)社會(huì )的不斷發(fā)展,不可再生能源的不斷消耗與其產(chǎn)生的環(huán)境污染,世界各國逐漸認識到清潔能源才是未來(lái)的理想能源。也是未來(lái)最有可能解決能源問(wèn)題的方式之一1.
我國在很早就意識到這一點(diǎn),從上世紀60年代開(kāi)始研究核聚變能四。之后又積極參與國際熱核聚變反應堆ITERE(Intemational Thermonusclear ExperimentalReactor)的研究工作。從90年代開(kāi)始研究托卡馬克41 (Tokamak)。經(jīng)過(guò)多年發(fā)展。
目前由中國科學(xué)院等離子體物理研究所承擔的中國聚變工程試驗堆CFETRIB-N(China Fusion Enginering Test Reactor)項目正在積極開(kāi)展,其目的就是縮短與ITER和歐洲示范堆DEMO ( European Demonstration Power Plant) 之間的差距1別,然后建立我們自己的聚變反應裝置從而獲得聚變能。
CFETR在運行過(guò)程中,堆芯部件1013會(huì )受到高溫等高子體的轟擊",嚴重時(shí)會(huì )損壞堆芯部件,在對其維護時(shí)需要借助遙操作RHI4I (Remote Handling)維護系統。遙操作維護系統主要是通過(guò)機器人代替人去完成- -些部件的檢查、拆卸、裝配、燁接等工作從而避免聚變堆中有害有毒物質(zhì)對操作人員的傷害1".
其中,堆芯部件包層模塊1-16)底部的多功能維護機械臂7是遙操作維護系統的一個(gè)部分,它的主要作用就是拆除包層底部鎖緊軸銷(xiāo),使包層模塊能夠順利轉運出真空室4.但是,由于聚變堆真空室內郁的空間十分有限,而多功能機槭臂在維護時(shí)通常需要通過(guò)復雜的流程才能完成任務(wù),所以對機械臂本身的結構、大小運動(dòng)規劃有著(zhù)非常嚴格的要求。這也是在設計機械臂時(shí)需要解決的難點(diǎn)問(wèn)題。
1.1 課題研究來(lái)源、 背景
1.1.1課題來(lái)源
課題所研究的內容基于國家大科學(xué)裝置項目,中國核聚變堆主機關(guān)鍵系統綜合研究設施:研究?jì)热輥?lái)自于《國家重大科技基礎設施建設"十三五"規劃》大科學(xué)工程項目:聚變堆主機關(guān)鍵系統綜合研究設施-遙操作維護平臺。
1.1.2課題背景
世界不可再生能源日益緊缺的情況下,國際上- -致認為聚變能是未來(lái)的理想能源,所以世界上有實(shí)力的大國都積極投入聚變裝置的研究中。中國聚變工程實(shí)驗堆,是我國自主設計和研制并聯(lián)合國際合作的重大的科學(xué)工程91.其目的旨在縮短我國聚變能研究領(lǐng)域與ITER和DEMO的差距,早日實(shí)現聚變能商用。
過(guò)操作技術(shù)又被公認為是通往商用托卡馬克聚變堆之路上必須要解決的關(guān)鍵問(wèn)題之-川。遙操作之所以如此重要,是因為它可以代替人去完成-些比較危險且難以完成的工作。遙操作是一一個(gè)與多學(xué)科對接并且很復雜的系統工程,涉及機。
器人、運動(dòng)學(xué)分析、工作空間分析、動(dòng)力學(xué)分析、路徑規劃等。
包層模塊是聚變能走向商用的核心載體,正因為是核心載體,所以在聚變裝置運行時(shí),它的損耗也是最大的,有一套完 善的包層過(guò)操作維護系統顯然很重要。
包層遙操作系統又分為包層吊裝系統、環(huán)向驅動(dòng)系統、徑向轉運系統、環(huán)向多功能維護平臺及維護工具、包層朕部冗余設計多功能機械臂。液壓抬升系統等組成。
其中包層朕部的多功能維護機械臂置于環(huán)向多功能維護平臺上,主要負責拆裝包層模塊底部的鎖緊柏銷(xiāo),是本文主要的研究?jì)热荨?/p>
1.2國內外研究動(dòng)態(tài)
托卡馬克(Tokamak), 是前蘇聯(lián)科學(xué)家在上世紀50年代提出的,利用醞場(chǎng)來(lái)約束等離子體,井加熱至較高的溫度使其發(fā)生聚變{.經(jīng)過(guò)幾十年的發(fā)展,托卡馬克裝置的研究工作取得了較大的進(jìn)展。目前關(guān)注度較高的是ITER、DEMO、我國的CFETR.同時(shí)伴隨著(zhù)托卡馬克裝置成長(cháng)的還有其維護系統-聚變堆包層遙操作維護系統的研究同樣取得較大進(jìn)展。
1.2.1 ITER 包層維護現狀
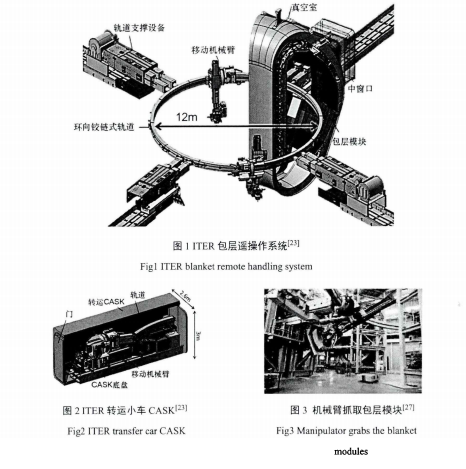
國際熱核聚變實(shí)驗堆ITER是世界上幾個(gè)大國共同參與建設的、最大的托卡馬克裝置,其包層遙操作維護系統如圖1所示。
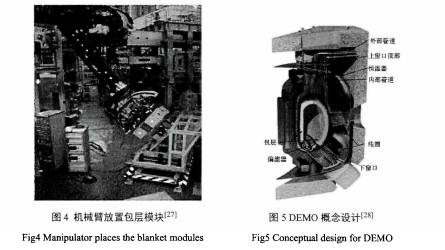
整個(gè)包層維護系統主要包括環(huán)向軌道、能在環(huán)向軌道上移動(dòng)的機械臂、環(huán)向軌道的支撐裝置。在對包層模塊進(jìn)行維護時(shí),首先打開(kāi)裝置的中窗口叫,裝載著(zhù)軌道和移動(dòng)機械臂的CASK12沿著(zhù)底部的導軌從中窗口進(jìn)入裝置內部。如圖2所示,環(huán)形軌道一共12節,中間通過(guò)特殊的連接機構連接。不用時(shí)可以折疊,存放在轉運小車(chē)CASK中使用時(shí)可以組成- - 個(gè)環(huán)彩,連接后通過(guò)支撐裝置支撐起來(lái),此時(shí)移動(dòng)機械臂可以沿著(zhù)軌道360度移動(dòng)。機械臂的前端裝有一個(gè)執行器,可以抓取需要維護的包層。再通過(guò)環(huán)向軌道將其轉運出真空室。
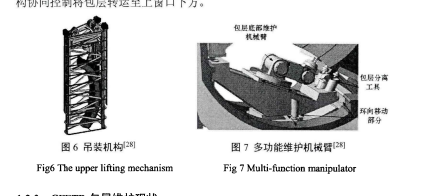
如圖3所示,是維護機械臂抓取包層模塊的實(shí)物圖。機械臂通過(guò)執行器抓起包層,然后沿著(zhù)環(huán)向軌道移動(dòng),再通過(guò)機械臂尾部的旋轉關(guān)節調節機械臂的位姿,將包層轉運到合適的位置,放置于專(zhuān)門(mén)的維護工具上,如圖4所示。
1.2.2 DEMO 包層維護現狀
歐洲的DEMO是在ITER的基礎上建立的-一個(gè)商用示范堆,目前仍處于概念設計階段,其包層維護系統設計與ITER有所不同。
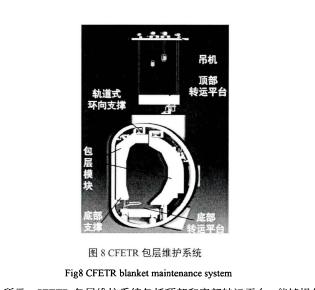
如圖5所示,包層上部連接有各種管道,維護時(shí)需要先切除管道,下部是偏濾器1242),維護時(shí)需要先將偏濾器移出真空室。
如圖6和圖7所示,包層維護系統分兩個(gè)部分,上部的 吊裝機構和下部維護機械臂。維護時(shí)吊裝機構連接包層上部,維護機械臂負責支撐拆卸和頂住包層底部,與吊裝機構協(xié)同工作,最后由吊裴機構將包層吊出真空室放置包層維護室中。
其中底部多功能機械臂安裝于多功能平臺上,-共三個(gè)自由度,加上多功能平臺的環(huán)向移動(dòng)一共四個(gè)自 由度。工作時(shí)先拆除偏濾器,然后通過(guò)下窗口將多功能平臺移入,機械臂開(kāi)始拆除包層底部的一些連接裝置, 同時(shí)上部吊裝機構開(kāi)始工作,于包層上部連接,準備起吊。然后多功能機械臂頂住包層底部,與吊裝機構協(xié)同控制將包層轉運至上窗口下方。
1.2.3 CFETR 包層維護現狀
CFETR是我國下一-階段的核聚變裝置,是聚變能實(shí)現商用的重要-步,目前處于概念設計的后期階段。它的包層維護系統也是經(jīng)過(guò)一代又- -代的設計與改進(jìn),總體維護策略并沒(méi)有大的改變,都是通過(guò)上部吊裝機構和底部多功能平臺及機械臂協(xié)同控制來(lái)完成維護。
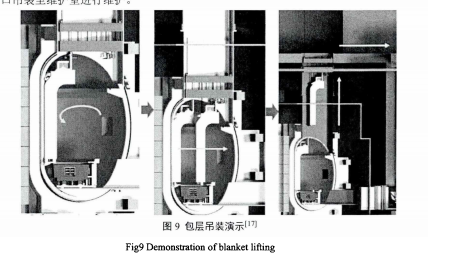
如圖8所示,CFETR包層維護系統包括頂部和底部轉運平臺、能夠提供環(huán)向移動(dòng)的軌道式環(huán)向支撐、頂部的吊裝系統。
如圖9所示,是一個(gè)完整的包層吊裝的過(guò)程。上 部的吊裝機構與包層上部連接,底部的多功能平臺與包層底部連接。通過(guò)協(xié)同控制先將包層環(huán)向移動(dòng)至吊裝窗口下方,然后沿著(zhù)多功能平臺徑向移動(dòng)至合適位置,吊裝機構將包層通過(guò)上窗口吊裝至維護室進(jìn)行維護。
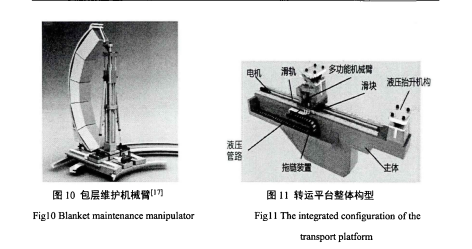
如圖10所示,是一個(gè)由四個(gè)液壓支撐組成的包層頂升機械臂。維護時(shí)機械臂頂部頂起包層并通過(guò)底部的徑向和環(huán)向軌道將機械臂調整至合適位置,再由上部;吊裝機構將包層吊出真空室。之后的研究中將這- -步進(jìn)行 了改進(jìn),如圖11所示,將底部裝置整合到-一個(gè)維護平臺上,機槭臂只負責拆除包層底部支撐,增加了液壓抬升機構,主要負責頂升包層。
1.3存在的問(wèn)題
在CFETR包層遙操作維護這一領(lǐng)域,由于聚變堆內部的空間異常狹小,針對包層底部鎖緊軸銷(xiāo)拆裝的維護機械臂設計與分析問(wèn)題,目前仍然沒(méi)有解決,所以本文自在解決冗余設計、運動(dòng)空間狹小條件下的包層維護機械臂結構設計與運動(dòng)分析問(wèn)題。
1.4 研究?jì)热菁罢鹿澃才?/strong>
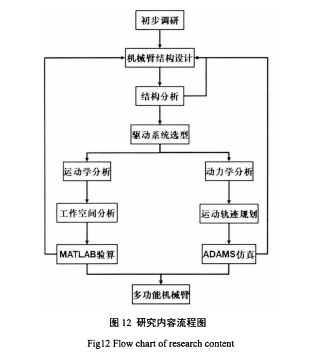
課題所研究?jì)热萑鐖D12所示,圍繞CFETR遙操作維護系統包層底部多功能機械臂的結構設計與運動(dòng)控制,在調研和分析的基礎上,根據托卡馬克裝置獨特的應用環(huán)境需求,首先通過(guò)概念設計出多功能機械臂,繪制三維模型,并對其進(jìn)行有限元分析,根據分析的結果判斷零件是否需要結構優(yōu)化1291;然后建立維護機械臂運動(dòng)學(xué)模型與動(dòng)力學(xué)模型,運用MATLAB及ADAMS軟件進(jìn)行仿真,根據仿真結果分析機械臂的合理性與可行性。
本文內容-共有五章,具體章節的研究?jì)热莅才湃缦拢?)第一章介紹課題來(lái)源、背景和研究目的,梳理了國內外聚變裝置包層維護的現狀,并指出了CFETR包層維護的難點(diǎn),然后引出本文研究的主要內容及章節安排。
(2)第二章主要介紹維護機械臂具體的結構形式,包括電機和減速機的選型,以及一些機械臂相關(guān)部件的結構設計:然后對機械臂的結構強度進(jìn)行有限元分析,確保所設計的機械臂結構能夠滿(mǎn)足設計要求。
(3)第三章主要利用解析法對多功能機械臂分別進(jìn)行正、逆運動(dòng)學(xué)分析,然后利用MATLAB軟件對運動(dòng)學(xué)結果進(jìn)行驗算,目的是驗證模型合理性:在此基;礎上,對機械臂工作空間進(jìn)行仿真,將仿真結果與實(shí)際維護所需空間做-一個(gè)對比,驗證機械臂可操作性。
(4)第四章主要對維護機械臂進(jìn)行動(dòng)力學(xué)分析,規劃出機械臂末端執行器的運動(dòng)軌跡,然后利用ADAMS軟件對機械臂進(jìn)行動(dòng)力學(xué)仿真,以此得出機械臂各關(guān)節的驅動(dòng)力和力矩,與第二章所選電機和減速機型號對比,驗證選型是否合理。
(S)第五章是結論和展望,主要對本文研究?jì)热葑?一個(gè)總結,找出不足點(diǎn),針對不足點(diǎn)做下一-步展望。
1.5 本章小結
本章介紹了課題的研究來(lái)源、背景,同時(shí)綜述了國內外在托卡馬克裝置包層。
迅操作維護技術(shù)的現狀,最后對包層底部維護機器人的發(fā)展進(jìn)行了分析與展望,同時(shí)介紹了本文所要研究的主要內容
2維護機械臂設計
2.1引言
2.2機器人本體設計
2.2.1關(guān)鍵技 術(shù)指標
2.2.2機械臂總體構型分析,
2.2.3機器人部件設計
2.2.4驅動(dòng)系統選型
2.3機械臂有限元分析
3機械臂運動(dòng)學(xué) 分析
3.1運動(dòng)學(xué)概述,
3.2剛體位姿描述
3.2.1 D-H 參數法
3.2.2機械臂 運動(dòng)學(xué)模型
3.3機械臂 正運動(dòng)學(xué)求解
3.4機械臂逆運動(dòng)學(xué)求解…
3.4.1求解過(guò)程
3.5.1 微分運動(dòng)與雅可比矩陣
3.5.2求解雅可比
3.6運動(dòng)學(xué)MATLAB仿真分析
3.6.1 驗證正運動(dòng)學(xué)
3.6.2驗證逆運動(dòng)學(xué)
3.6.3工作空間分析
3.7 本章小結
4機械臂動(dòng)力學(xué)分析
4.1動(dòng)力學(xué)概述
4.2動(dòng)力學(xué)方程的建立
4.2.1動(dòng)力學(xué)分析方法
4.2.2拉格朗日法…
4.2.3連桿 上任意點(diǎn)的速度
4.2.4系統的動(dòng)能
4.2.5系統的勢
4.2.6拉格朗日方程
4.2.7動(dòng)力學(xué)方程
4.3基于A(yíng)DAMS的動(dòng)力學(xué)仿真
4.3.1傷真的前處理
4.3.2仿真的結果分析 .
5結論與展望
5.1 全文總結
本文針對CFETR包層遢操作維護系統,查閱了國際上核聚變裴置包層維護這一領(lǐng)域的相關(guān)文獻,總結相關(guān)設計的優(yōu)缺點(diǎn),根據CFETR前人設計的基礎,基于概念設計、拓撲優(yōu)化設計的方法,運用D-H矩陣法、解析法、蒙特卡洛法、拉格朗日法,設計出了包層底部多功能維護機械臂,分析了機械臂的運動(dòng)學(xué)、工作空間、動(dòng)力學(xué)、運動(dòng)軌跡。
本文主要研究?jì)热菘偨Y如下:
1.在查閱大量文獻,充分了解國內外聚變裝置包層遙操作維護系統研究動(dòng)態(tài)的前提下,基于CFETR包層維護目前研究現狀,通過(guò)對比分析,設計了包層底部的多功能維護機械臂、機械臂的末端執行器、執行器作用對象以及機械臂相關(guān)的其他部件,并對機械臂做了ANSYS有限元分析,保證了機械臂的結構強度。
2.使用 D-H參數法建立了機械臂的坐標系,并驗證了其正確性:使用解析法計算出了機械臂的運動(dòng)學(xué)正、逆解和雅可比矩陣,利用MATLAB軟件對運動(dòng)學(xué)的計算結果做了驗算;同時(shí)根據運動(dòng)學(xué)正解,基于MATLAB,使用蒙特卡洛法仿真了機械臂的工作空間,井與實(shí)際維護所需工作空間進(jìn)行對比,結果正確。
3.使用拉格 朗日法建立了機械臂的動(dòng)力學(xué)方程,先通過(guò)計算機械臂連桿某一 點(diǎn)的動(dòng)能和勢能,然后推出機械臂的的動(dòng)能和勢能,進(jìn)而求解出動(dòng)力學(xué)方程:
在此基礎上,基于A(yíng)DAMS軟件,對機械臂進(jìn)行了動(dòng)力學(xué)分析仿真和運動(dòng)規劃,得出了機械臂各關(guān)節的力和力矩,為電機和減速器的選型提供了理論依據。
5.2創(chuàng )新點(diǎn)研究?jì)热菀劳杏贑FETR工程項目,通過(guò)對未來(lái)聚變堆包層底部多功能維護機械臂的設計和運動(dòng)學(xué)、工作空間、動(dòng)力學(xué)、運動(dòng)軌跡分析研究,解決了冗余設計、狹小運動(dòng)空間條件下聚變堆包層底部維護機械臂機構設計、運動(dòng)學(xué)、動(dòng)力學(xué)分析及其仿真驗證問(wèn)題。
5.3研究展望
本文雖然設計出了包層底部維護機械臂并分析了其結構可行性和可靠性,但由于各種原因,還有很多工作沒(méi)有完善。
在機械臂精度與穩定性方面,由于CFETR包層采用大模塊整體設計,單個(gè)模塊體積和重量都較大,在維護過(guò)程中稍有偏差,包層會(huì )發(fā)生傾斜或者更為嚴重的側翻,將會(huì )給聚變堆帶來(lái)不可想象的嚴重后果,所以機械臂操作精度方面要求很高,這一點(diǎn)需要進(jìn)一步研究。
在機械臂維護的具體流程方面,機械臂是集成在多功能平臺上,多功能平臺和機械臂是- -個(gè)整體,本文只是對機械臂本體進(jìn)行研究,下一 步需要結合多功能平臺進(jìn)行綜合考慮:同時(shí),機械臂的末端執行工具不止一種,在工作時(shí)需要更換不同的執行器,更換下來(lái)的執行器如何安放以便于維護操作也將詳細規劃。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)