24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
目前汽車(chē)軸承制造還處于半自動(dòng)化階段,其生產(chǎn)線(xiàn)上還存在大量人工作業(yè)。其中很多工作具有重復性高、勞動(dòng)強度大、存在一定危險性等特點(diǎn)。由于汽車(chē)輪轂軸承特殊的結構、外形以及制造工藝,導致其自動(dòng)化生產(chǎn)比普通軸承困難。隨著(zhù)產(chǎn)品需求量和人力成本逐步攀升,實(shí)現汽車(chē)輪毅軸承組裝生產(chǎn)線(xiàn)上多個(gè)相鄰工位間的局部全自動(dòng)生產(chǎn)顯得愈發(fā)重要。針對大連某日資企業(yè)提出的需求,本課題研制了- -款適用于多種型號汽車(chē)輪轂軸承的自動(dòng)搬運機械手本文首先對自動(dòng)搬運機械手的國內外現狀進(jìn)行了研究,搜集了相關(guān)資料。然后到企業(yè)現場(chǎng)對汽車(chē)軸承生產(chǎn)線(xiàn)做了詳細謂研; :確定了設備的設計原則與技術(shù)指標。完成了自動(dòng)搬運機械手各部分的方案設計,包括自動(dòng)搬運工藝流程、整體布局、機槭結構方案以及控制系統方案。
依據既定方案,本文對設備的機械結構進(jìn)行了詳細設計,運用Solidworks軟件完成了三維建模和二維圖紙的處理。在A(yíng)NSYS Warkbench仿真環(huán)境中對機械手的關(guān)鍵零部件做了有限元分析,優(yōu)化了部分結構,驗證了結構的強度剛度均滿(mǎn)足實(shí)際工況下的使用要求,并在- -定程度上排除了機械手工作過(guò)程中發(fā)生共振破壞的危險。
控制系統主要包括控制回路、人機交互系統和控制程序。本文根據控制系統的設計要求對電源電路、PLC控制電路、何服運動(dòng)控制電路、氣動(dòng)控制回路都做了詳細設計。
運用觸摸屏組態(tài)軟件設計了交互界面,并與控制按鈕等部件共同組成了人機交互系統。
通過(guò)對聯(lián)動(dòng)生產(chǎn)安全性間題做出的分析歸納,結合搬運機械手的機械結構與控制回路,對控制程序進(jìn)行了設計完成了自動(dòng)搬運機械手樣機的裝配和控制柜的描建,井安裝到企業(yè)生產(chǎn)現場(chǎng)進(jìn)行調試運行。然后根據運行結果時(shí)設備進(jìn)行針對性的完善和改進(jìn)。最后通過(guò)了生產(chǎn)試驗。自動(dòng)搬運機械手成功應用,驗證了設計的合理性,完成了設計目標,解決了相關(guān)問(wèn)題,井為汽車(chē)軸承生產(chǎn)線(xiàn)的改造提供了成功案例,使該設備具備了更大的推廣空間。
關(guān)鍵詞:汽車(chē)軸承生產(chǎn)線(xiàn):自動(dòng)搬運機械手:結構設計:控制系統:樣機應用
Abstract
At present, the manufacture of automobile bearings is sill in the semi automatic sage, andthere are still a large number of imanual operations on its produetion line, many of which havethe cararteristis of high repeatability, high labor intensity, dangerous and 50 on. Because ofthe specinl structure, shape and manufacturing process of utomobile bub bearing, theautomatic production of utomobile hub bearing is more iffcult than that of ordinary bearing.
With the gradual increase of product demand and labor cost, it is more and more important torealze the loeal automatic prodbction between several adjacene satios in the autobile hubbearing assembly line. According to the demand put forward by a Japanese- funded entepise inDalian, an automaric handling maipulator suitable for various types of auomobile hubbearings is developed in this paper.
First of al, this paper studies the current situation of the automatic handling manipulator athome and abroad, and cllects tbe relevant data. After a detailed investigation of the automobilebearing productio line at tbe eiterprise site, this paper determines the design principls andtechrical indicators of the equipment. The scherne design of cach part of the automalie handlingmanipulator is comnpleted, including the automatie handling procs, the overall layout, themechanical structure schene and the control systeim scheme.
According to the established sclbeme, the mechanical structure of the equipment isdesigned in detail, and the three-dimensional modeling and two-dimensional drawingprocessing are completed by using Solidworks sftware. The finite element alys of the keyparts ofthe manipulator is done in the ANSYS Workbench simulation enviroument. The resultsof finite element analysis are used to optimize part of the structure, and it is verfied that thestrengh and siffhess of the structure meet the requirements of the actual working conditions,and to a certain extent, the danger of resonance damage in the working process of themanipulator is eliminated.
The control system mainly includes control loop, human-computer ineraction system andcontrol progpam. According to the design requirements of the control system, this paper makesa detailed design of the power supply ciruil, PLC control circuit, servo motion control ciruitand pmeumatic control ciruil. In this paper, the interactive interface is designed by using thetouch screen configuratio softwar. The human- computer interaction system is composed ofinteractive iterface, control buttono and other components. Through the analysis and induction of the safety problems of linkage production, combined with the mechanical structure andcontrol loop of the handling manipulator, the control program is designed.
This paper completes the prololype assembly and control cabinet consiruction of theautomatie bandling manipulator, and intalls it to the production site of the enterprise fordebugging and operation. Finally, this paper makes targeted improvement and improvement ofthe equipment according to the operation results, and passed tbe production lest. The successfulapplication of the automatic handling manipulator not only verifes the rationality of the design,but also completcs the design goal and solves the related problems, which provides a successfulcase for the transformation of the automobile bearing production line and makes the equipmenthave more room for promotion.
Key Words: Automotive bearing production line; Automatic handling robot; Sinucturaldesign; Control System; Prolotype application

目錄
1緒論
1.1 課題研究背景及意義
2000年我國汽車(chē)全年銷(xiāo)售量?jì)H有208.6 萬(wàn)輛,200-2017 年間,中國汽車(chē)銷(xiāo)量增長(cháng)13.8倍,復合增長(cháng)率達到22.7%.從2006年到2013年,全球汽車(chē)保有量平均以4%的速度增長(cháng),而中國的增長(cháng)速度更高達20%以上。2014年全球汽車(chē)保有量超過(guò)10億輛,截至2017年6月,我國汽車(chē)保有量已達2.05億輛,千人汽車(chē)保有量達到146輛,但距高歐美、日本等發(fā)達國家的550-800 輛/千人有較大差距,仍有較大提升空間".如圖1.1所示的汽車(chē)輪轂軸承是汽車(chē)關(guān)鍵零部件,其需求量也快速增長(cháng)。
經(jīng)過(guò)多年發(fā)展,中國已經(jīng)是世界公認的制造大國,但與制造強國相比還存在-定差距2)。工業(yè)自動(dòng)化技術(shù)的進(jìn)步,實(shí)現了普通軸承的全自動(dòng)生產(chǎn),但汽車(chē)輪轂軸承由于特殊的結構、外形以及生產(chǎn)工藝,導致自動(dòng)化生產(chǎn)的難度遠大于普通軸承,其生產(chǎn)模式還處在半自動(dòng)化階段。汽車(chē)軸承生產(chǎn)線(xiàn)的自動(dòng)化水平雖然在不斷提高,其中很多工藝步驟逐漸用機床取代了手工,但是依然存在大量人工作業(yè),尤其是汽車(chē)輪轂軸承的組裝生產(chǎn)線(xiàn)。目前阻礙汽車(chē)軸承制造企業(yè)進(jìn)一步發(fā)展的因素主要有以下幾個(gè)方面:
(1)人力資源問(wèn)題。由于生活成本的提高、供求關(guān)系失衡等原因,造成了勞動(dòng)力結構性短缺以及勞動(dòng)力成本攀升,在某些沿海工業(yè)密集地區尤其嚴重丐。足夠多的工作人員,又會(huì )給企業(yè)的管理帶來(lái)負擔,涉及到員工福利、資源分配以及制度的推行等諸多方面的問(wèn)題4:
(2)效率和安全問(wèn)題。在制造型企業(yè)中,工人的勞動(dòng)環(huán)境通常存在噪音、油污以及一些安全隱患等15].這些問(wèn)題不僅對人體造成傷害,而且還會(huì )影響生產(chǎn)效率,甚至引發(fā)安全事故,對企業(yè)的發(fā)展產(chǎn)生阻礙:
(3)產(chǎn)能問(wèn)題。汽車(chē)數量逐年增加,并處在不斷更新?lián)Q代和報廢淘汰的循環(huán)增長(cháng)中凹,導致汽車(chē)軸承的需求量不斷攀升,'其產(chǎn)量急需增加。為此,提高汽車(chē)軸承生產(chǎn)線(xiàn)的產(chǎn)能迫在眉睫。
這些問(wèn)題給國內汽車(chē)軸承制造廠(chǎng)商的繼續發(fā)展帶來(lái)了很大阻礙,進(jìn)一步提高生產(chǎn)線(xiàn)的自動(dòng)化程度成為促進(jìn)企業(yè)發(fā)展的關(guān)鍵途徑。汽車(chē)軸承的生產(chǎn)工藝復雜,包含很多道工序,許多相鄰工位之間的工件搬運和上下料還是由工人來(lái)完成,這些工作存在重復性高、勞動(dòng)強度大、具有一定危險性等特點(diǎn)。
采用多自由度工業(yè)機器入、組合式多工位機床或引進(jìn)整套全自動(dòng)生產(chǎn)線(xiàn)等辦法可以解決問(wèn)題,但價(jià)格過(guò)于高昂,對于很多企業(yè)來(lái)講得不償失。市面上的一些針對沖壓、 澆注以及倉儲物流等領(lǐng)域研制的搬運機械手,又不能適用于汽車(chē)軸承生產(chǎn)線(xiàn)。所以急需經(jīng)濟性好、工作效率高、功能滿(mǎn)足需求且適用于汽車(chē)軸承生產(chǎn)線(xiàn)的自動(dòng)化設備來(lái)取代人工。
針對大連某日資企業(yè)提出的需求,本課題的研究具有以下幾方面意義:
(1)可以強化汽車(chē)輪轂軸承的加工過(guò)程,降低廢品率,提高產(chǎn)品質(zhì)量:
(2)降低生產(chǎn)過(guò)程中安全事故發(fā)生的可能性,保障生命和財產(chǎn)安全;(3)加快生產(chǎn)節拍、增強連貫性,從而提高生產(chǎn)效率和產(chǎn)能,增加產(chǎn)量:
(4)用機器取代人工,增強了經(jīng)濟效益,有利于企業(yè)長(cháng)期發(fā)展:
(5)為汽車(chē)軸承生產(chǎn)線(xiàn)的改造工程提供了參考案例和新思路。
1.2 國內外研究現狀
1.2.1國外研究現狀
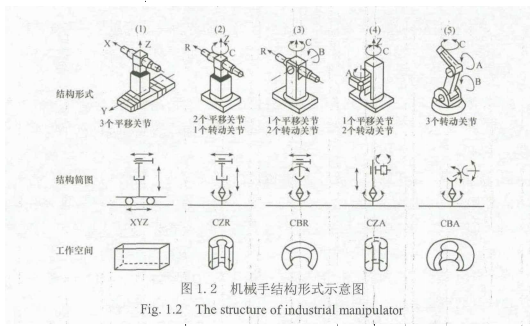
如圖1.2所示為現代工業(yè)機械手常見(jiàn)的結構示意圖,20 世紀60年代初美國研制出了世界上第一臺工業(yè)機器人圈,從此開(kāi)始了機器人的發(fā)展:第- -階段是20世紀60年代末興起的示教再現型機器人,這類(lèi)工業(yè)機器人需要事先給他們規劃動(dòng)作順序和運動(dòng)路徑;第二階段是感覺(jué)機器人或者說(shuō)是自適應機器人19.10.它們能獲取外界環(huán)境和操作對象的簡(jiǎn)單信息,對外界環(huán)境的變化做出簡(jiǎn)單判斷并調整自己的動(dòng)作來(lái)減少錯誤(".20世紀90年代以來(lái),這類(lèi)機器人的數量在工廠(chǎng)中不斷增長(cháng)。成為現在企業(yè)最廣泛使用的類(lèi)型!2):
第三階段:是高級智能機器人,他們能夠識別工作對象和環(huán)境,然后根據指令和自身判斷的結果做出自適應動(dòng)作13.4.這類(lèi)機器人隨著(zhù)大數據、互聯(lián)網(wǎng)以及通信技術(shù)的發(fā)展,開(kāi)始成為當下研究的一-股重要浪潮。
現在,在工業(yè)發(fā)達的國家中,工業(yè)機器人已經(jīng)被廣泛應用到汽車(chē)及汽車(chē)零部件制造、機械加工、電子電氣、橡膠及塑料、食品、物流等諸多領(lǐng)城中,按照功能可以分成搬運、上下料、碼垛、電焊、噴涂、切割、裝配等多種類(lèi)型,瑞士的ABB機器人(如圖1.3所示)、德國的庫卡、日本的FANUC和安川電機并稱(chēng)工業(yè)機器人四大家55-1].著(zhù)名的工業(yè)機器人品牌還包括那智不二越、川崎機器人(如圖1.4所示)、史陶比爾、柯馬等等。這些企業(yè)通過(guò)多年的技術(shù)積累,形成了各具特色的*品和技術(shù)創(chuàng )新路線(xiàn),并構建了自身的核心競爭力,占據著(zhù)產(chǎn)業(yè)中上游陣地圖。;六軸- -體機VT6L是2019年1月愛(ài)普生公司工業(yè)機器人的新品,其最大負載6公斤,采用控制器內置、手腕中空、免電池馬達單元等設計,支持寬電壓范圍工作,是一款針對六軸簡(jiǎn)單搬運市場(chǎng)|9]而推出的高性?xún)r(jià)比產(chǎn)品:

2019年發(fā)布的協(xié)作機器人IRB 1100支持ABB全新的OmniCore&trade控制器,具有先進(jìn)的運動(dòng)控制功能,是快速裝配、取放和物料搬運的理想選擇。它的出現進(jìn)- .步拓展了ABB小型機器人產(chǎn)品線(xiàn)120),使得生產(chǎn)效率提高了35%,占地面積縮小約10%.
除了工業(yè)機器人可以解決生產(chǎn)線(xiàn)中的工件搬運及上下料的問(wèn)題之外,許多國外企業(yè)和科研機構有實(shí)力研發(fā)針對汽車(chē)軸承生產(chǎn)線(xiàn)的專(zhuān)用型機械手和多工位-體化機床。但對于國內企業(yè)而言,其研發(fā)費用以及設備報價(jià)都過(guò)于昂貴,通常難以引進(jìn)并使用。
1.2. 2國內研究現狀
國內工業(yè)機器人技術(shù)起步較晚,從863計劃中發(fā)展機械手的主題開(kāi)始,經(jīng)過(guò)多年的研究和發(fā)展,雖然出現了如沈陽(yáng)新松機器人之類(lèi)的工業(yè)機器人品牌,但在核心部件等方面還是存在一-定 差距(2].動(dòng)作簡(jiǎn)單的專(zhuān)用機械手應用越來(lái)越廣泛,在- -定程度 上能夠滿(mǎn)足替代人力的需求,往往經(jīng)濟性比工業(yè)機器人要好,配合生產(chǎn)線(xiàn)上的設備進(jìn)行聯(lián)動(dòng)生產(chǎn)能夠發(fā)揮巨大的作用。
2010年華中科技大學(xué)的于衍偉等入設計了一款針對中小企業(yè)的自動(dòng)送料機械手,這款機械手X方向行程最大為3000mm,Y方向最大行程為100mm,負載僅為3kg,每分鐘可完成10次搬運[21.但從結構和負載等方面來(lái)考慮,這款設備都不適用于目前急需改造的汽車(chē)軸承生產(chǎn)線(xiàn):
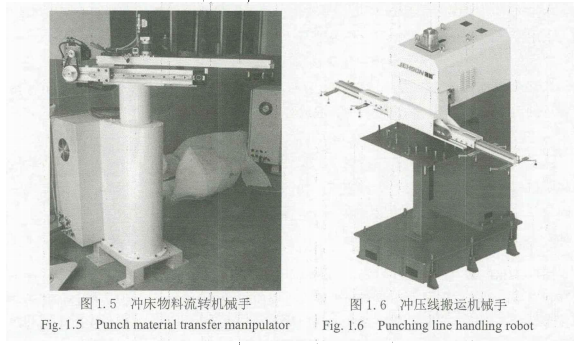
2016年南京理工大學(xué)與奇凡自動(dòng)化科技有限公司進(jìn)行產(chǎn)學(xué)研合作,研制出針對南通鍛壓設備有限公司NTC80噸沖床的物料流轉機械手如圖1.5所示(3)。該設備能進(jìn)行旋轉和伸縮運動(dòng),以電機為驅動(dòng)元件,配合腕部夾取機構來(lái)實(shí)現對物料的搬運。對于本文的汽車(chē)輪教軸承組裝生產(chǎn)線(xiàn)而言,該機械手的運動(dòng)軌跡以及搬運方式等方面都并不適用:
2017年江蘇大學(xué)虞鵬設計的離合器壓蓋沖壓線(xiàn)搬運機械手如圖1.6 所示1241.這臺機械手采用了齒輪齒條傳動(dòng),以伺服電機和氣缸作為驅動(dòng)元件,配合夾取機構來(lái)實(shí)現工件的搬運與上下料功能:整臺設備采用PLC作為核心控制器,井利用觸摸屏設計了配套的人機交互界面。雖然此設備已經(jīng)成功應用于沖壓生產(chǎn)線(xiàn),但對于本課題中汽車(chē)輪轂軸承組裝生產(chǎn)線(xiàn)上的三個(gè)相鄰工位來(lái)講,該設備難以應用。
如圖1.7所示為- -種多工位機床,它是2019年廣州東振機電設備有限公司為大連某汽車(chē)軸承制造商研制的內輪預壓入&間隙測定機。整臺機床包含多個(gè)加工及檢測工位,集成了工件的加工、檢驗、搬運及上下料等多項功能,從入口到出口完成了局部全自動(dòng)生產(chǎn)。但由于價(jià)格較為高昂,所以并不適宜大范圍定制新機床來(lái)更新生產(chǎn)線(xiàn)。
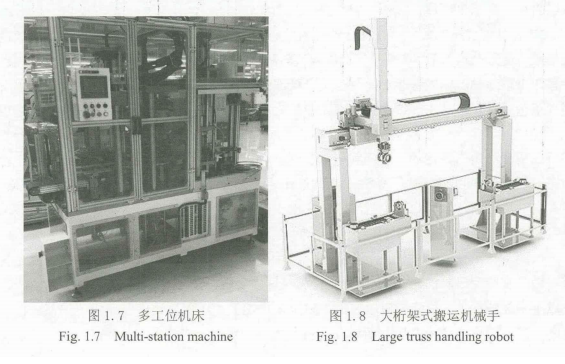
如圖1.8所示的搬運機械手近年來(lái)比較常見(jiàn)23-2.這種機械手采用桁架形式的主體結構,一般使用電機作為驅動(dòng)單元配合傳動(dòng)機構完成手臂的移動(dòng),再輔以專(zhuān)用的夾取機構來(lái)完成工件的搬運及上下料作業(yè)。但對生產(chǎn)線(xiàn)布局影響較大,占地面積太大,而且不便于日常維護,經(jīng)濟性也存在一些間題,對現有汽車(chē)軸承組裝生產(chǎn)線(xiàn)來(lái)說(shuō)并不適用。
隨著(zhù)中國制造2025的提出,高速化、高精密化、自動(dòng)化、智能化的需求愈發(fā)重要,也成為了自動(dòng)搬運機械手的發(fā)展趨勢,這對現有的機械結構和控制方式都提出了新的要求[2.要完成自動(dòng)化生產(chǎn)線(xiàn)的建設任務(wù),大范圍淘汰老舊設備、引進(jìn)新型全自動(dòng)化生產(chǎn)線(xiàn)是不現實(shí)的。在原有汽車(chē)軸承組裝生產(chǎn)線(xiàn)的基礎。上進(jìn)一步改造升級,并采用合適的自動(dòng)搬運設備才是可行方案。市面上常見(jiàn)的工業(yè)機器人、大桁架式機械手以及直角坐標式機械手等設備在設計方法和產(chǎn)品等方面都已經(jīng)比較成熟。但本課題面臨的汽車(chē)軸承生產(chǎn)線(xiàn)中這種聯(lián)動(dòng)生產(chǎn)安全性要求高、布局局限性大、性能要求高又要具備經(jīng)濟性和柔性化特點(diǎn)的情況,目前市面上的現有設備中尚未發(fā)現可以應用的實(shí)例。
1.3 汽車(chē)軸承生產(chǎn)線(xiàn)簡(jiǎn)介
每輛汽車(chē)平均使用50套軸承(29,汽車(chē)輪轂軸承是其必不可少的關(guān)鍵零部件,它與普通軸承差別較大。目前汽車(chē)輪轂軸承已經(jīng)發(fā)展到了第四代,第三代汽車(chē)輪轂軸承是現今應用最為廣泛的301.本課題來(lái)源于大連某汽車(chē)軸承制造廠(chǎng),它的汽車(chē)輪轂軸承生產(chǎn)線(xiàn)經(jīng)過(guò)多年的發(fā)展,形成了以旋削、研磨、組立三大區域為主體的生產(chǎn)布局。本次研制的自動(dòng)搬運機械手要應用到如圖1.9所示的H2生產(chǎn)線(xiàn)組立區城,該區城總共有將近25道工序,包含機床20多臺,又被稱(chēng)為組裝生產(chǎn)線(xiàn)。近年來(lái),企業(yè)通過(guò)將組裝生產(chǎn)線(xiàn)的加工工序逐漸由手工換成自動(dòng)化機床來(lái)提高產(chǎn)能,但各工位之間工件搬運以及機床的上下料作業(yè)基本還是由人工來(lái)完成。
1.4 本文主要研究?jì)热?/strong>
本課題要研制-款適用于多種型號汽車(chē)輪轂軸承的自動(dòng)搬運機械手裝置,用來(lái)實(shí)現大連某汽車(chē)軸承制造企業(yè)現場(chǎng)的三個(gè)相鄰工位局部全自動(dòng)生產(chǎn),主要研究?jì)热萑缦拢?/p>
(1)查閱國內外相關(guān)資料和文獻等,歸納總結課題的研究背景及意義。對汽車(chē)軸。
承生產(chǎn)線(xiàn)整體和H2組裝生產(chǎn)線(xiàn)的對應工位進(jìn)行調研,理清研究思路:
(2)確定出自動(dòng)搬運機械手的設計原則與技術(shù)指標,并對機械手的搬運工藝流程、整體布局、機械結構方案和控制系統方案進(jìn)行設計:
(3)根據設計方案對機械手的結構進(jìn)行詳細設計。運用Solidworks 軟件對設備整體進(jìn)行三維建模設計和二維圖紙處理。在A(yíng)NSYS Workbench環(huán)境下對關(guān)鍵零部件進(jìn)行了有限元分析,優(yōu)化部分結構,驗證了結構的強度剛度均滿(mǎn)足實(shí)際工況下的使用要求,并在一定程度上排除了機械手工作過(guò)程中發(fā)生共振破壞的危險:
(4)對控制系統的功能和特點(diǎn)進(jìn)行總結,并對聯(lián)動(dòng)生產(chǎn)安全性問(wèn)題進(jìn)行分析。對電源電路、PLC控制電路、伺服運動(dòng)控制電路、氣動(dòng)控制回路分別做出設計。根據機械結構與控制系統的設計,通過(guò)觸摸屏組態(tài)軟件完成了交互界面的設計。最后根據機械手的結構、所需完成的功能和安全聯(lián)動(dòng)分析結果等條件對控制程序進(jìn)行設計:
(5)將加工完成的零部件裝配成完整設備,完成控制系統和控制柜的搭建,然后進(jìn)行初步調試完善,并將搬運機械手安裝到汽車(chē)輪轂軸承組裝生產(chǎn)線(xiàn)上進(jìn)行二次調試完善。對自動(dòng)搬運機械手在汽車(chē)軸承生產(chǎn)線(xiàn)上的試運行結果進(jìn)行統計分析,根據使用效果對細節進(jìn)行微調。最后對全文進(jìn)行總結與展望。
2自動(dòng)搬運機械手方案設計
2.1機械手設計原則與技術(shù)指標
2.2.自動(dòng)搬運工藝流程
2.3整體布局規劃
2.4機械結構方案設計
2.4.1夾取方案
2.4.2移動(dòng)方案
2.4.3機架方案
2.5控制系統方案設計
2.6本章小結
3自動(dòng)搬運機械手結構設計及仿真分析
3.1搬運機械手的機械結構設計
3.1.1夾敬機構
3.1.2移動(dòng)機構
3.1.3機架結構
3.1.4整體結構
3.1.5重要零部件選型
3.2機械手關(guān)鍵零部件的有限元分析
3.2.1有限元法與模型處理
3.2.2拓撲優(yōu)化
3.2.3靜力學(xué)分析
3.2.4模態(tài)分析
3.3本章小結
4自動(dòng)搬運機械手控制系統設計
4.1控制系統的設計要求和功能
4.2控制回路設計
4.2.1電源電路
4.2.2PLC控制電路
4.2.3伺服運動(dòng)控制電路
4.2.4氣動(dòng)控制回路
4.3人機交互系統設計
4.3.1控制面板與觸摸屏組態(tài)軟件
4.3.2主界面與監控報警記錄
4.3.3型號切換與手動(dòng)界面
4.4控制程序設計
4.4.1聯(lián)動(dòng)生產(chǎn)安全性問(wèn)題分析
4.4.2程序設計與檢驗
4.5本章小結。
5自動(dòng)搬運機械手安裝調試與生產(chǎn)試驗
5.1搬運機械手本體組裝與測試
5.2生產(chǎn)線(xiàn)現場(chǎng)安裝調試
5.3試運行試驗與設備改進(jìn)
5.4實(shí)際生產(chǎn)試驗
5.5本章小結
結論
目前市場(chǎng)上普通軸承的生產(chǎn)線(xiàn)基本已達到全自動(dòng)水平,但汽車(chē)軸承生產(chǎn)線(xiàn)的自動(dòng)化程度還相對落后。隨著(zhù)社會(huì )的高速發(fā)展,進(jìn)- -步 提高汽車(chē)軸承生產(chǎn)線(xiàn)的自動(dòng)化水平有助于企業(yè)發(fā)展,原有老舊生產(chǎn)線(xiàn)的升級改造勢在必行。針對大連某8資企業(yè)提出的需求,為解決汽車(chē)軸承生產(chǎn)線(xiàn)上重復性高且勞動(dòng)強度大的搬運及上下料問(wèn)題,本文研制了一款適用于多種型號汽車(chē)輪轂軸承的自動(dòng)搬運機械手。它能引導三個(gè)相鄰工位進(jìn)行聯(lián)動(dòng)來(lái)實(shí)現局部全自動(dòng)生產(chǎn)。本文結論如下。
(1)通過(guò)文獻和企業(yè)反饋得知:從國外引進(jìn)能夠滿(mǎn)足需求的自動(dòng)搬運設備價(jià)格高昂。不符合企業(yè)的切身利益:國內沒(méi)有可以適用于當前汽車(chē)軸承生產(chǎn)線(xiàn)的現成產(chǎn)品。的過(guò)與汽車(chē)軸承制造企業(yè)商討后,總結出了自動(dòng)搬運機械手的設計原則與技術(shù)指標。
(2)對汽車(chē)軸承H2組裝生產(chǎn)線(xiàn)進(jìn)行調研后,根據現場(chǎng)情況做出了專(zhuān)門(mén)適用于當前生產(chǎn)線(xiàn)環(huán)境的布局規劃:并依據設計原則和技術(shù)指標設計了搬運工藝流程。經(jīng)過(guò)討論和分析后,確定夾取機構采用擺動(dòng)卡爪與夾具配合的方案、升降機構采用螺桿滑臺和何服電機組成的伺服電缸方案、樸移機構的方案采用氣缸和擋塊結構、機架采用中間高兩側低的框架式方案、控制系統采用以PLC為核心的電氣控制方案。
(3)根據既定方案設計了自動(dòng)搬運機械手機械結構的三維模型,確定出了卡爪、電缸、氣缸等重要零部件的型號。通過(guò)三維建模環(huán)境初步驗證了機械結構的可行性。對選定的結構模型進(jìn)行了拓撲優(yōu)化:然后通過(guò)靜力學(xué)分析得到結構的等效應力和變形,校核出強度剛度均滿(mǎn)足要求:井且利用模態(tài)分析得到結構的固有頻率,初步排除了共振的危險。通過(guò)關(guān)鍵零部件的有限元分析在+定程度上驗證了結構的可靠性。
(4)根據機械結構和控制方案設計了設備的控制回路,并完成了對應的人機交互系統,包含了監控、報警、自動(dòng)/手動(dòng)控制、型號選擇與錄入等功能;然后進(jìn)行了聯(lián)動(dòng)生產(chǎn)安全性問(wèn)題的分析。總結了機械手和三工位機床之間在不同工況下自鎖互鎖的充要條件,井據此設計了配套的控制程序,保證了設備安全穩定運轉。在控制回路。人機交互系統和控制程序三者共同作用下,達到了自動(dòng)搬運機械手的控制目標和要求。
(5)根據設計圖紙完成了第一臺自動(dòng)搬運機械手的粗裝和測試,對測試結果分析總結后完善了設備。然后在實(shí)際生產(chǎn)線(xiàn)中進(jìn)行了設備的安裝調試。并進(jìn)行了試運行試驗。
試驗結果顯示自動(dòng)撒運機械手還存在不足。根據結果對設備進(jìn)行了針對性改進(jìn)。最后進(jìn)行了實(shí)際生產(chǎn)試驗,根據結果可知:機械手搬運成功率達到企業(yè)要求:機械手以6s/次的速度完成搬運并啟動(dòng)三工位對應機床開(kāi)始動(dòng)作,始終超過(guò)8%次的人工最快速度,完全替代掉兩名工人:生產(chǎn)線(xiàn)環(huán)境相比人工作業(yè)有了顯薯改善:機械手實(shí)現了柔性化的設計目標,并且滿(mǎn)足了重復精度和定位精度;證明了方案的可行性、結構的可靠性。仿真分析的正確以及控制系統的穩定。
(6)自動(dòng)搬運機械手在進(jìn)行實(shí)際生產(chǎn)試驗的過(guò)程中達到了汽車(chē)軸承生產(chǎn)廠(chǎng)商的要求,已完全通過(guò)了驗收。該設備實(shí)現了機器替代人工的目標,消除了工人體力下降帶來(lái)的各種不良影響,降低了產(chǎn)品的不合格率:保障了生產(chǎn)過(guò)程的安全性,加快了生產(chǎn)節拍井降低了生產(chǎn)成本,達到了局部全自動(dòng)生產(chǎn)的水平。第- - 臺機械手成功投入使用給同類(lèi)設備的研發(fā)提供了經(jīng)驗和實(shí)例,并對汽車(chē)軸承生產(chǎn)線(xiàn)后續的改造工程有一-定參考意義,使自動(dòng)搬運機械手具有了更大的推廣空間和應用價(jià)值。
隨著(zhù)科技的高速發(fā)展,自動(dòng)化設備朝著(zhù)更智能。更高效、更安全的方向發(fā)展。由于本人經(jīng)驗和項目條件所限,汽車(chē)軸承生產(chǎn)線(xiàn)自動(dòng)搬運機械手仍有以下幾方面可以進(jìn)一步研究和提高:
(1)可以進(jìn)一一步優(yōu)化程序和控制架構。并增加控制系統的仿真模擬,更充分的發(fā)揮機械手性能:
(2)在有限元分析中可以看出零部件的強度剛度等不僅能滿(mǎn)足需求,還存在較大余量,可以進(jìn)一-步優(yōu)化機械手某些零部件的結構:
(3)后續研發(fā)過(guò)程中可以對自動(dòng)搬運機械手做更詳細的虛擬樣機仿真,增加動(dòng)力學(xué)。疲勞壽命等方面的分析:
(4)可以增加更多地機械手的性能實(shí)驗測試,得出更多的數據進(jìn)行分析。做出更詳細更準確的評估,從雨進(jìn)-步優(yōu)化各項設計、提升性能。
參考文獻
[1] 唐小康汽車(chē)輪犟分總成零件傳送機械手的研制[D]成都西華大李,2018.
[2] 張衛東自動(dòng)化生產(chǎn)線(xiàn)搬運機械于設計的研究月:科技經(jīng)濟導刊2018.26025996.
3] 武晉源申勁光王芳等-種軸承搬運裝置:中國201721211912.9PL 2018-04-20.
[4] 艾曉飛設備及生產(chǎn)線(xiàn)自動(dòng)化改造與管理[].設備管理與維修。01701):19-20.
[5] Lian B. Sun T, Song Y. Parameter sninty analysis of a S-Do F prlel maipulator[JIL Roboticsand Compuer-lntegrted Mamufacturing 2017, 46:14.
[6]王厚勇,張文佳, 辛磊高,等機器人與自動(dòng)化技術(shù)在生產(chǎn)線(xiàn)智能化改造中的應用[I汽車(chē)工藝師,2017(03):2427.
[7] 張飛呂金波,孟憲 飛等。工件搬運裝置中國2010349291.2019-04-12.
[8] Mako Makawa. Robot Technology(RT) Trend and Sedrdiztion[C]. Nagoya, Japan. 2005IEEE Workshop o Advanced Robotis and its Social Impacts 2005: 249-293.
[9] Honaprdee M, Tarkian M. J. Olvander, et al. Finger destgn sutomaton fo industrial robou gipprpA reriem[J]. Robotics and Atonomous Sysuems, 2016. 87:104-1 19.
[10] Zhang J, Wang T, Hong 1, et al Review of Soft bodied Manipulator[J]. Joumal of MechaialEnginering, 2017, 5013):928.
[11] Yeshnmakhametov A. Kalinoldayev M. Manythayev 0, et al Desipn and kinematics of srialparalelbybrid rbobCVUIntcrationa Cofarace on Control. EEE, 2017.
[12] Takeuchi, Yoshimi, Asakama, NokL Ge, Dongfang. Antomaion of Polisbing Work by an IndusralRobol : System of Polishing Robot[)。 Jsme Imtemstional Jounaset.ce Dyamics Contral RobotitsDesign & Manufrcturing 1993, 364()556-561.
[13] In-Chul Ha. Kinmematic panmeter cibration method for indstrial robot manipulator using the rlarivepsi[I]. joumal of mechanical science & tchnoloes, 2008, 26:1084-1090.
[14] Sayed B M,Fani M, Mohamed A M Design of a novel hybrid ecxoskeleton for msshadingIhllgent Robot Systems IEE. 2016.
[15]衛東,金飾,范秀敏,等。自動(dòng)生產(chǎn)線(xiàn)中搬運機械于動(dòng)態(tài)謂度鍛略的實(shí)現[)。制造技術(shù)與機20009):20-21+3.
[16] Zhang H M. Pch L S, Wang Y H. Servo Motor Control Systcm and Method of Auo-Dection ofTypes of Servo Mr{UJ, Aplied Mechanis and Materials. 2014.46-5001510-15153.
[17] Tianmiao Wang, Research Status and Idustrialization Developemen Strategy of Chinese IndustialRobu([n. Joumal of Mechankcal Engineerig 2014, 509;1.
[18] Davide Quartai Marello Pogiani, Maro Polino, 出al. An Experimental Security Analysis of anIndustrial Robot Cortoller[C)/2017 IEEE Symposium on Security and Priacy (SP)。 IEEE, 2017.
[19] Liu C. Kinemabical and Dyrarmic Analysis of 6-DOF Industrial Robol[CVInermationl Symposium onComputational lelligeice & Design' IEE, 2017.
[20] Milinv C, Mezei A D, Tamas L. Olieet handling in cltered indor enviroement with a mobilemanipulaor[CVIEEE Intemtionl Confernce on Aatomation. IEEE, 2016.
[21]王家興李陽(yáng)輪轂物未自動(dòng)化設備的應用川金屬加工(冷如工)2018(07]:71-73.
[22]于銜偉,張禪林,韓松,等。適用于中小型沖床的經(jīng)濟型自動(dòng)選料機械手研制D]搬壓技20161668(231張宇飛沖床物料流轉機械手結構設計及運動(dòng)傷真D].南京:南京理工大學(xué),2016[24]虞鵬。離合器壓蓋沖B線(xiàn)搬運機械手的設計分析與控制系統研究[DI.鎮江:江蘇大學(xué),2017.
[25]蓋少磊宋文平,于志勇桁架式全自動(dòng)加工制造技術(shù)研究[D制造技術(shù)與機床201808):179-181.
[26]王成龍大郴架機械手設計與仿真[D]沈陽(yáng)沈陽(yáng)工業(yè)大學(xué),2017.
[27]權占群張樹(shù)禮桁架機械手及在柔性加工自動(dòng)線(xiàn)上的應用[D金屬加工(P加工,201412);23-25.
[28]孫厚濤高藝像李國文火車(chē)車(chē)輪自動(dòng)激運機構的設計[)]機械工程師。201908)13.
[29]劉妝衛張鋼股慶振汽車(chē)輪賴(lài)軸承的發(fā)展現狀及趨勢[],現代機械20780[30]陶報強汽車(chē)輪轂軸承滾動(dòng)體裝配裝置的研制pD]大連大連海事大學(xué)2018.
[3I]劉志明,陳碩,朱建風(fēng)用于輪輞埠縫刨渣機的多工位董運機械手設計[D]機械制造與自動(dòng)化。2017.46(03)-204-207+215.
[32] Yu s, Gil M. Mmriplatar handling derice fer ssembly of large size panels[D]. Asembly Automation,2012, 32(4):361-372.
[3] 王洪良一種軸承機械撒過(guò)裝置:中國,2012169007.51P]2018-07-17.
[34] Tarmura. H Manabe T,Tanno K et 吐The eloctic whelcair control system usingsufac-lectcerygram of facial muscles[C]// World Autematioe Congress. IEEE, 2010.
[B5] Y. Hibiro, T. Maruno, K. Olanoto. Rocent pvers o lrg-cale PLC tchmologis with sdhvancadfunctions[D]. NTT Review, 2001, 13(5)4-9.
[36]李廈,趙映樣,基于Workbench 的U型桁架機械手的有限元分析與優(yōu)化川]農業(yè)裝備與車(chē)輛工程01856011)47-51.
[37] 袁星屋,曾禮平。田宏艷。基于有陽(yáng)元分析法的汽車(chē)驅動(dòng)盤(pán)設計與優(yōu)化D機械設計與研。20193502101-105.
([38]康耀東ANSYS Worbech I5.0結構分析快速入門(mén)指南[M北京電子工業(yè)出版杜。2015.
[39]梁銳王樂(lè )朱方濤翟培訓一種噴涂 機構的筋板結構有限元分析及其優(yōu)化設計[].機械研究與應用20193202133-136.
[40]張巖。ANSYS Wrbench 15.0有限元分析從入門(mén)到精通[M.北京機械工業(yè)出版社,2014.
[41]靜亞基于有颶元分析的新能源汽車(chē)鷹盤(pán)結構靜強度分析[D.內燃機與配件201924)0444[42]劉蹈,神梁雛,李森林基于A(yíng)NSYS Workbench 的發(fā)動(dòng)機支架優(yōu)化設計m農業(yè)裝備與車(chē)輛工程208.561):76-79.
[43]楚飛,雷字,高潮等基于A(yíng)NSYS Worsbench的頂驅提環(huán)側連接板的拓撲優(yōu)化設計[)]機械設計與研究2019.350189-191+195.
[44]鄭博有最元法在吊架靜力學(xué)分析中的應用門(mén)有色設備,201301);45-31.
[45]單輝祖材料力學(xué)[M]北京高等教育出版社,2016.
146]聞邦椿柳洪文劉杰等機械設計手冊[M.北京:機械工業(yè)出版社,2018.
[47]徐嘉,基于有限元法的分級破碎機分體式機架的靜力學(xué)分析[)]選煤技術(shù),2017(05):13-15.
[48]劉坤,吳耀東,劉向陽(yáng)。基于有限元法的雙穩態(tài)機構靜力學(xué)分析凹。內江科技208.908)87.
[49]曹慶平,愉皖生洪育成基于有限元法的電機機座的模態(tài)分析[刀]內燃機與配件201804:44 46.
[50]黃小天本明,孫煒海,視國榮基于有限元法的試驗臺電動(dòng)機支座模志分析與結構改進(jìn)切新技術(shù)新工藝201811)-52-56.
[51] Franceschini G . Pirani s . Rinaldi M.st al. SPICE aisted simulatiom of coetrollol tetrie drives: anppiation to smiched rlectace drives[C]/ Industy Aplications Society Meeting lEE. 2002.
[S2]趙晶孔樣松,楊貴志電氣控制與PLC應用技術(shù)[M]西安:西安電子科技大學(xué)出版社,2017.
[S3]劉春林。史斐娜。基于PLC的搬運機械手硬件系統設計再可編程控制器與工廠(chǎng)自動(dòng)化201408):65-68+70.
[54]霍坦李曉片張家強等口服液生產(chǎn)線(xiàn)搬運機械手系統設計J裝備制造技,201507:245-246
[55] D. Kolokosa, GS. Stevrnakakis, K. Kalaitzakis, a al. Genetic algrithims optimized fuxzy controllerrfor the indoor environmental management in buildings implemented using PLC and local operatingnetworks[J]. Engineering Aplicatioms of Arfeial Ielligence, 2002, 15(59:417-428
[56]楊斷穎甸服電機控制技術(shù)的應用及發(fā)展趨向分析[]現代制造技術(shù)與裝備201905)/91-92
[57]劉銀木劉福玲,液壓與氣壓傳動(dòng)M]北京機械工業(yè)出版社2017.
[58] Mamupati V K. Anand R, Thakar J 1. Adsptive podution control systom for 自firxiblemanufacturing cell using suppont vetor mahinebased approsch[D] The Intemational Joumal ofAdvanced Manfictuning Technology, 2013, 67(1)969-981.
[59]例黃宇機械刺造企業(yè)安全管理及對策探討J].設備管理與維修2019(04):1415.
[60]甄石鑫,空調裝配自動(dòng)化生產(chǎn)線(xiàn)控制系統設i計[j哈爾濱:哈爾濱工業(yè)大學(xué),2017
致謝
歲月流轉,如白駒過(guò)隙,三年的學(xué)習生活即將告一段落。值此論文完成之際,向攻讀學(xué)位期間每- -位 幫助過(guò)我的人,表達最誠摯的謝意。
首先要感謝我的導師李成求教授,本文是在李老師的悉心指導下才得以完成的。從課題的選定、開(kāi)題報告、中期檢查直至最終完成本文,整個(gè)過(guò)程中老師嚴謹的治學(xué)態(tài)度和淵博的專(zhuān)業(yè)知識都讓我受益匪淺。李老師寬廣的胸懷、實(shí)事求是的為人以及正直積極的教誨,都將在我未來(lái)的人生路途中起到巨大的幫助,感激之情無(wú)以言表。i其次要感謝不斷鼓勵我與幫助我的父母與長(cháng)輩們;感謝呂雪欣和王洋兩位工程師對本論文內容的指導與貢獻;感謝宿行軒師兄以及王金舜、文楓、彭笑雨等同學(xué)在學(xué)習和生活中提供的幫助與支持;感謝每一位在本文參考文獻中直接或間接涉及到的國內外專(zhuān)家學(xué)者和前輩,沒(méi)有你們的辛苦研究與積累,也就沒(méi)有本論文存在的可能。
最后,向百忙之中參加論文評審、答辯等工作的專(zhuān)家和老師們,表示深深的祝福以及由衷的感謝!
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)