24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
由于脆性材料抗沖擊能力和抵抗動(dòng)載荷的能力較差,且抗拉能力遠低于抗壓能力,因此實(shí)際生產(chǎn)過(guò)程中非常容易破碎。人造金剛石的合成原料葉蠟石塊和葉蠟石環(huán),都是易碎件,并且生產(chǎn)過(guò)程伴隨著(zhù)高強度、重粉塵污染的工作環(huán)境。實(shí)現生產(chǎn)過(guò)程的機械化和自動(dòng)化能夠提高生產(chǎn)效率。為了解決脆性材料生產(chǎn)中存在的難題,實(shí)現自動(dòng)化和智能化生產(chǎn),本文設計了一種內撐式抓取的機械手構型,并對手指結構進(jìn)行優(yōu)化分析,探討了不同剛度匹配的手指骨構型與易碎件接觸碰撞規律,具體研究?jì)热萑缦拢?/p>
本文首先通過(guò)分析葉蠟石生產(chǎn)原料的形狀、材料特性和有效工作空間等方面的因素,提出了具有指掌協(xié)同特征的機械手構型,設計了適用于薄壁脆性材料的內撐式上下料機械手整體系統。然后,在機械手整體構型基礎上,對采用等速推送氣缸、等壓推送氣缸、伺服電動(dòng)推桿為驅動(dòng)模式的三類(lèi)機械手結構及相應的控制系統進(jìn)行了對比分析,并給出了三種驅動(dòng)結構的適應場(chǎng)合。
為了探索機械手的最優(yōu)構型以及運動(dòng)參數,減小機械手手爪抓取工件的沖擊速度,以設計的機械手結構參數關(guān)系為基礎,連桿參數為變量,以不降低手爪整體運動(dòng)的平均速度而降低手爪接觸點(diǎn)的沖擊速度為目標,建立優(yōu)化模型,采用遺傳算法進(jìn)行尋優(yōu)計算。
通過(guò)對機械手結構參數進(jìn)行優(yōu)化,減小了手指指尖接觸易碎件的沖擊速度,降低了機械手抓取易碎件過(guò)程中脆性材料破碎的概率,并提高了作業(yè)可靠性。
為了尋找適應于薄壁易碎件的內撐式抓取機械手手指骨構型和剛度匹配模型,探索抓取過(guò)程的接觸-碰撞規律,設計了軟性手指與剛性手指結合的手指指端結構,建立了剛性手指體與軟性手指體的不同"肌骨"搭建構型,并研究和分析了不同構型的接觸剛度變化規律。采用 Hypermesh 等軟件集成建模的方法,建立了機械手指端零部件有限元模型,通過(guò) LS-propost 軟件對有限元模型施加相應的約束、載荷、接觸類(lèi)型等,并進(jìn)行后處理,計算得到環(huán)形易碎件接觸碰撞過(guò)程中的應力、應變云圖,并以此為基礎,設計和優(yōu)化手指骨搭配模型。
為了驗證機械手系統的實(shí)際工作性能,開(kāi)發(fā)并搭建了機械手系統的實(shí)驗平臺,設計了控制系統的總體方案,并對各個(gè)控制模塊的硬件型號進(jìn)行分析和選擇。通過(guò) trio 控制卡對運動(dòng)模塊進(jìn)行設計和編程,并開(kāi)展其運動(dòng)特性實(shí)驗研究,證明了薄壁易碎件內撐式上下料機械手整體結構方案和設計參數的合理性。
本課題的研究成果將為薄壁易碎件上下料柔性機械手的設計提供新構型,對新理論與方法進(jìn)行了探討與實(shí)踐,為推動(dòng)生產(chǎn)過(guò)程中對薄壁易碎件作業(yè)的自動(dòng)化和智能化提供基礎。
關(guān)鍵字:內撐式機械手;薄壁易碎件;運動(dòng)建模;結構優(yōu)化;沖擊仿真
ABSTRACT
Because of their poor impact resistance and resistance to dynamic loads, Brittle materialsare very easy to break in the actual production process. Artificial diamond's synthetic rawmaterials are pyrophyllite stone and pyrophyllite ring (both of them are fragile workpieces)。
The production process of diamond is accompanied by high intensity and heavy dust pollutionworking environment. To solve the above problems, we need to realize the mechanization andautomation of the production process of brittle materials. Therefore, we design a newmechanical hand structure of internal brace grab and optimize the finger structure. In addition,we discuss the contact collision law between finger bone configuration and fragile workpieceswith different stiffness matching. The specific research contents are as follows:
In this paper, the manipulator configuration with the characteristics of finger-palmcoordination is proposed by analyzing the shape, material characteristics and effectiveworking space of raw materials for pyrophyllite production. The overall configuration ofinternal brace loading and unloading manipulator suitable for thin-walled brittle material isdesigned On the basis of the overall configuration of the manipulator, the three kinds ofmanipulator structures and the corresponding control system which adopt the drive mode ofisokinetic push cylinder, isobaric push cylinder and servo electric push rod are compared andanalyzed.
So as to explore the optimal configuration of the manipulator and motion parameters,reduce the impact of the manipulator hand grab workpiece speed, based on the design of themanipulator structure relationship, connecting rod parameter as a variable, not to reduce theaverage gripper overall movement speed and reduce the impact of the gripper contact point asthe goal, the optimization model is established, the optimization procedure using geneticalgorithm to calculate.Reduces the impact speed of the fingertips in contact with the fragileworkpieces and improves the reliability of the workpiece operations.
The finger end structure of soft finger and rigid finger is proposed, and different "musclebone" structures are established, in order to find the matching model of finger bone structureand stiffness of inner brace grab manipulator suitable for thin-walled and fragile workpieces,and the contact-collision law of grab process was explored. A finite element model ofmechanical finger end workpieces is established, and the stress and strain cloud diagram ofannular fragile workpieces during contact collision is obtained by simulation calculation. Themethod of integrated modeling is adopted by Hypermesh and other software. Based on this, a finger bone matching model is designed and optimized.
So as to verify the actual performance of the manipulator system, the experimentalplatform of the manipulator system is built, and the overall scheme of the control system isdesigned. We design and program the motion program by trio control card, and carry out theexperimental study of its motion characteristics, it is proved that the overall structure schemeand design parameters of the thin-walled fragile inner braced loading and unloadingmanipulator are reasonable.
The research results of this paper will provide a new configuration for the design offlexible manipulator for loading and unloading thin-walled fragile parts, and discuss andpractice the new theory and method. It provides the basis for promoting the automation andintelligence of thin-walled fragile parts in the production process.
Keywords: Inner braced manipulator; Thin-walled fragile workpieces; Motion modeling;Structural optimization; Impact simulation

目錄
第一章 緒論
1.1 課題研究的背景及意義
本課題來(lái)源于國家自然科學(xué)基金面上項目"薄壁易碎件內撐式高速作業(yè)柔順機械手剛度-構型匹配設計與運動(dòng)創(chuàng )成研究"(52075500),河南省科技攻關(guān)重點(diǎn)項目"易碎件高速上料與裝配柔順機械手系統研發(fā)"(202102210086)。
脆性材料從受力破壞到斷裂只出現極小的彈性變形,而不出現塑性變形,因此其極限強度一般不超過(guò)彈性極限,且脆性材料抵抗動(dòng)載荷或沖擊的能力較差,抗拉能力遠低于抗壓能力,通常具有易碎特性。脆性材料在日常生活中隨處可見(jiàn),應用極為廣泛,比如玻璃、陶瓷等,尤其在安全防護領(lǐng)域占有重要地位,如陶瓷裝甲、混凝土工事、防爆玻璃等。機械手針對薄壁易碎件的高速抓取與作業(yè)生產(chǎn)線(xiàn)在非金屬材料加工、食品包裝生產(chǎn)、輕工產(chǎn)品的加工,以及眾多行業(yè)的物流過(guò)程等具有很大的應用需求[1-2].智能機械手的出現不僅解放了勞動(dòng)力,加快了產(chǎn)品的生產(chǎn)速度,而且機械手按照既定的程序進(jìn)行操作,產(chǎn)品的精準度也得到了質(zhì)的提升[3].
以具有戰略意義的人造金剛石合成過(guò)程為例,人造金剛石合成原料葉蠟石塊的生產(chǎn)如圖 1-1 所示,其原料及成品皆是易碎件。中國人造金剛石的產(chǎn)能已經(jīng)占全球產(chǎn)能的 80%以上[4],但是由于葉蠟石塊生產(chǎn)是高強度、重粉塵污染的重復工作,已經(jīng)很難吸引新的工人就業(yè),威脅到產(chǎn)業(yè)的正常運轉。采用機械手上料和轉運薄壁易碎件需滿(mǎn)足產(chǎn)品生產(chǎn)過(guò)程的高速作業(yè)要求。

葉蠟石塊是合成人造金剛石的原料,現有設備通常采用液壓機來(lái)生產(chǎn)葉蠟石塊。圖1-1 顯示了葉蠟石塊的產(chǎn)生過(guò)程。圖 1-1 (a)為葉蠟石環(huán),它是易碎的,首先將其轉運在模具上方(圖 1-1 (b)),然后裝配在模具的凸模上(圖 1-1 (c));在此之后,葉蠟石粉末被填充到模具腔中,液壓機將葉蠟石環(huán)和粉料壓制成葉蠟石壓塊(圖 1-1 (d));葉蠟石壓塊呈四棱形,其內徑與葉蠟石環(huán)的內徑大小一致,如圖 1-1 (f)所示;然后利用可以上下移動(dòng)的底模將葉蠟石壓塊推出,如圖 1-1 (e)所示;最后,將易碎的葉蠟石壓塊轉移到指定位置。
目前,在人工生產(chǎn)葉蠟石塊的過(guò)程中,工人通過(guò)雙手握住專(zhuān)用工具,依次完成葉蠟石環(huán)的抓取、組裝和轉移工作,生產(chǎn)效率非常低下。為提高作業(yè)效率,需研發(fā)相應的機械手系統來(lái)完成相應的操作過(guò)程。
在機械手抓取易碎件的作業(yè)過(guò)程中,易碎件的強度與受力條件限制了機械手與易碎件之間的接觸應力,適用于薄壁易碎件作業(yè)的末端執行器存在較大的技術(shù)瓶頸,比如:
高速抓取過(guò)程中,抓取手指與薄壁易碎件之間的碰觸沖擊可能導致易碎件的破損;在裝 配過(guò)程中,機械手與易碎件之間的"硬"施力易造成易碎件破損等問(wèn)題。因此研究和解決薄壁易碎件高速作業(yè)機械手系統面臨的技術(shù)難題,具有重要的理論和應用價(jià)值。
1.2 國內外機械手發(fā)展現狀
1.2.1 國內外上料機械手和末端執行器發(fā)展現狀
針對機械手上下料作業(yè),世界上許多公司研發(fā)了適用于生產(chǎn)線(xiàn)的上下料機械手系統,包括瑞士 ABB 公司、德國 Muller Weingarten 公司、Honsberg 公司、瑞典 ASEA 公司等都對上下料機械手進(jìn)行了系列研究[5],例如 ABB 公司開(kāi)發(fā)的 IRB 系列自動(dòng)上料機械手,如圖 1-2 所示。德國 Muller Weingarten 公司研制的 KR-P 系列沖壓機械手[6],如圖 1-3所示。

在中國,相關(guān)領(lǐng)域也開(kāi)展了眾多的研究。如華中科技大學(xué)的于衍偉等研發(fā)了針對沖床的自動(dòng)上下料機械手系統,該系統采用觸摸屏和 PLC 控制,實(shí)現了生產(chǎn)過(guò)程的自動(dòng)化,并集成了故障監控報警、板件雙料檢測等功能[7],很大程度上提高了沖壓加工作業(yè)的生產(chǎn)效率,結構簡(jiǎn)圖如圖 1-4 所示。但是該自動(dòng)送料機械手僅適用于小型沖壓生產(chǎn),應用范圍具有局限性。

上海通用汽車(chē)張永春等人設計了針對汽車(chē)風(fēng)窗玻璃安裝過(guò)程的自動(dòng)上下料系統,該系統包括裝有提升吸盤(pán)的垂直提升裝置,裝有移栽吸盤(pán)的橫向移栽裝置,可以沿鋁合金軌道移動(dòng)的隨性安裝裝置以及軌道電氣組件等。但該系統主要解決單片重量超過(guò) 20kg的風(fēng)窗玻璃上料運載問(wèn)題[8],通過(guò)吸盤(pán)抓取整塊玻璃。由于葉蠟石環(huán)本身結構的特殊性,因此無(wú)法采用類(lèi)似的吸盤(pán)抓取設計方案。
河北科技大學(xué)研制的層壓機上料機械手系統如圖 1-5 所示,該系統基于視覺(jué)輔助,可以有效完成太陽(yáng)能電池組件從組裝完畢到層壓前的全部搬運工作[9],其末端執行器采用氣缸驅動(dòng)的 U 型夾爪,如圖 1-5(a)所示。該氣動(dòng)夾爪屬于工業(yè)生產(chǎn)線(xiàn)中常見(jiàn)的上料機械手結構,但只能實(shí)現針對太陽(yáng)能電池組件特定結構的抓取工作,而且抓取過(guò)程中也不需要對工件實(shí)現夾緊作用。

末端執行器是機械手系統實(shí)現特定抓取功能的關(guān)鍵部件,設計方案上多采用電機或氣缸驅動(dòng)的多連桿機構模型,該類(lèi)執行器常用于工業(yè)生產(chǎn)線(xiàn)的搬運工作。典型的結構如德國 FESTO 公司的氣動(dòng)夾持器(圖 1-6(a))、SCHUNK 公司的氣動(dòng)平行爪夾持器(圖1-6(b))、Gimatic 公司氣動(dòng)手指夾爪(圖 1-6(c))和亞德客手指氣缸(圖 1-6(d))等[10].大多數末端執行器對于特定的抓取對象,其設計方案是可行的,運動(dòng)單一且穩定,但相對局限,缺乏靈活性,會(huì )由于物體的變形與環(huán)境的干擾而無(wú)法實(shí)現精準抓取[11].對于工件的抓取,抓取的方式可能有很多種,使用指尖實(shí)現物體的精確抓取,是一種可能實(shí)現的解決方案[12].有學(xué)者研究了手指與抓取工件的交互模型,為新型手指結構的設計及抓取模式的選擇提供了新的思路。許多研究人員針對不同的手指設計方案進(jìn)行了抓取分析研究[13],如對側面抓取的策略、動(dòng)力特性、抓取方式等方面進(jìn)行了深入的研究[14],如:Vincent Babin 等對機器人抓取器進(jìn)行了改進(jìn),使其能夠抓取光滑堅硬表面上的大而薄的物體[15].

在上料機械手和末端執行器的設計和研究方面,國內外學(xué)者根據工件特定抓取要求、現場(chǎng)安裝、工作條件等采用并聯(lián)機械手構型或者串聯(lián)運動(dòng)模組構型與末端執行器配合完成工作,已取得了較大的進(jìn)展和實(shí)際應用。但目前適用于薄壁易碎件作業(yè)的末端執行器和上料機械手還未涉及,存在較大的技術(shù)瓶頸。
1.2.2 國內外靈巧機械手研究現狀
從實(shí)現靈活運動(dòng)的機械手構型看,仿人手臂和靈巧手指具有代表性,目前的靈巧手已經(jīng)能夠實(shí)現人手的某些抓握操作[16].例如德國宇航中心 DLR 研制的"Hasy"機械手臂,是第一個(gè)基于變剛度驅動(dòng),采用仿生學(xué)關(guān)節進(jìn)行手指設計的多指靈巧手,研究重點(diǎn)主要放在靈巧性、魯棒性和動(dòng)態(tài)性能上[17],如圖 1-7 所示。

麻省理工學(xué)院的人工智能實(shí)驗室和猶太大學(xué)的工程設計中心聯(lián)合開(kāi)發(fā)了一種作為研究機器靈巧通用研究工具的機器人末端執行器,Utah/M.I.T 機械手。該機械手具有多 種自由度、非常高的主動(dòng)和被動(dòng)性能,可用于研究各種觸覺(jué)傳感器系統[18],如圖 1-8 所示。

美國 NASA/JSC 的 L. B. Bridgwater 等人先后研制了 Robonaut 1 和 Robonaut 2 機械手,研制的 Robonaut 2 型五指靈巧機械手更加接近人手大小[19].該機械手結構如圖 1-9所示。Robonaut 2 機械手驅動(dòng)方式是電機驅動(dòng),手指端產(chǎn)生大約 23KN 的拉力,并且在Robonaut 1 的基礎上進(jìn)行了結構優(yōu)化,極大減小了 Robonaut 2 機械手的復雜程度。
Robonaut 2型機械手能夠實(shí)現不同的抓取模式,完成對多種不同形態(tài)物體的手握式抓取,其抓取姿態(tài)如圖 1-10 所示。

東京大學(xué)研制出的 Janken Robot 機械手[20],根據影像追蹤技術(shù)識別復現人手的動(dòng)作姿態(tài),并且在機械手的指端位置安裝有多個(gè)力、位移、溫度傳感器,可以測量各手指關(guān)節的位置、力矩以及抓取物體的溫度,并且能夠控制施力的大小。在剪刀石頭布的游戲中可以快速識別出人手的手勢并做出反應,保證了極高的獲勝率,如圖 1-11 所示。
深圳機器智能有限公司研發(fā)的多指靈巧手 DORAHAND 如圖 1-12 所示,實(shí)現了手 指模塊化、接觸靈敏性、活動(dòng)靈巧性的功能,每根手指都有獨立的感知單元,可以實(shí)現獨立工作,并且支持熱拔插,解決了不易維護的問(wèn)題。其每根手指擁有 14 個(gè)傳感器,能夠感知力的大小[21],可以適用于大部分物件的抓取需求,但由于其手指的結構特征,并不適用于抓取葉蠟石環(huán)等環(huán)狀易碎件。

浙江工業(yè)大學(xué)特種裝備制造重點(diǎn)實(shí)驗室先后研發(fā)了氣動(dòng)驅動(dòng)多指靈巧手 ZJUTHand 和全驅動(dòng)無(wú)耦合柔性多指靈巧手[25-27].目前,仿人手臂與靈巧手指方面的研究在人工肌肉、抓取控制等多方面都有進(jìn)展[28-29].但仿人靈巧機械手非常依賴(lài)傳感器和控制交互,其結構冗雜笨重,難以控制,且裝置成本較高,維護較難,因此在一定程度上限制了靈巧機械手在工業(yè)生產(chǎn)中的應用,如圖 1-14 所示。

1.2.3 柔順、軟體構型機器人研究現狀
具有柔順結構的機械手,在眾多領(lǐng)域都有著(zhù)巨大的應用價(jià)值。典型的高性能機械手末端柔順系統,包含:奧地利 KEBA 公司的主動(dòng)柔順?lè )ㄌm,美國 ATI 工業(yè)自動(dòng)化公司的工業(yè)機械手柔順拋光裝置。國內對柔順系統的研究也相當廣泛,如:田利梅等設計了采用被動(dòng)柔順結構的高精度自動(dòng)加液機器人,圓筒形柔順結構位于機器人手臂與自動(dòng)工具交換裝置連接處,基體采用鋁合金,中空結構采用柔性的橡膠,因此可以在前后高剛度安裝面之間產(chǎn)生較大的彈性形變[30],結構如圖 1-15 所示。

苗玉彬等通過(guò)在末端執行器上設置柔順機構來(lái)實(shí)現果蔬采摘機器人無(wú)損采摘需求,即在驅動(dòng)機構和弧面手指之間設置柔順機構,柔順機構在一定的位移范圍內通過(guò)變形調控,產(chǎn)生類(lèi)似于超彈性的效果[31],其柔順梁模型結構示意圖如圖 1-16 所示。

在機器人領(lǐng)域,隨著(zhù)對柔順性要求的不斷提高,機器人領(lǐng)域的發(fā)展出現一個(gè)新的方向-軟體機器人。近年以來(lái),軟材料被開(kāi)發(fā)用于軟穿戴機器人領(lǐng)域、醫療康復領(lǐng)域中[32-36],如圖 1-17 所示。Xu 等[37]利用連續體機構原理進(jìn)行擬人手的設計,實(shí)現了許多日常生活物品的穩定抓取和夾緊功能,為開(kāi)發(fā)更為智能的柔順機械手提供了一種新的思路。
在軟體機械手方面,美國在軟體機械手方面,美國的俄亥俄州立大學(xué) SU 等[38]研制了一款驅動(dòng)和傳感內嵌在硅橡膠材料的 3D 印刷模具內的軟體手,具有較強的適應性和柔順特性,不僅可應用于復雜非結構環(huán)境中,而且對操作人員更加安全,如圖 1-18 所示。

在機器人與目標物的接觸與沖擊作用機理方面的研究也比較廣泛。為了減少撞擊,Bruneau 等設計了具有柔性足的兩足機器人,在腳和地面之間加入了彈簧阻尼元件,改變剛性固體之間單一接觸點(diǎn)的情況[39].近年來(lái),除了采用軟腳法,還提出了一些其他的減震策略。如:對于平面機器人,可以采用人工肌肉和磁流變制動(dòng)器[40].Schumann 等研究不同的腳設計材料[41],以在剛度和阻尼之間進(jìn)行權衡,形成高能效的機器人的腳結構以減少沖擊力。Hauser 等設計的 Oncilla 四足機器人采用基于生物靈感開(kāi)發(fā)的軟體材料設計腳墊,由包裹在柔性膜中的顆粒介質(zhì)組成,以增強摩擦和阻尼[42],如圖 1-19 所 示。

柔順和軟體機械手與剛體機械手的本質(zhì)區別在于,在結構上結合了聚合物、橡膠、智能材料等軟體材料的天然柔順優(yōu)勢,在柔順性、靈活性、控制方式等方面具有更多可能性[41],為開(kāi)發(fā)抓取機械手提供了一種新的思路。
1.3 研究易碎件沖擊方法的國內外現狀
本課題研究對易碎件的抓取,涉及手指與易碎件之間的沖擊問(wèn)題。有關(guān)對易碎件沖擊的研究,比較典型的研究方法如下:
Saurabh Rathod 等[43]對陶瓷-金屬復合材料的彈道性能進(jìn)行了數值分析,有限元建模是在 Abaqus 顯式模型中進(jìn)行的,通過(guò) JH2 材料模型來(lái)模擬陶瓷的材料性能,如圖 1-20所示。
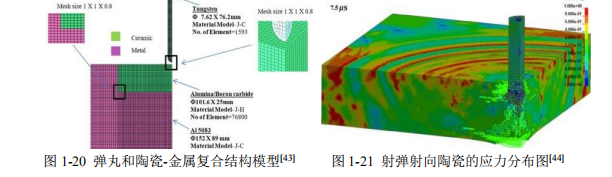
Bresciani 等[44]提出了一種用三維拉格朗日有限元方法來(lái)模擬鎢重合金鈍頭彈丸撞擊氧化鋁陶瓷瓦的新方法,采用有限元轉化到 SPH[45](光滑粒子流體動(dòng)力學(xué))單元來(lái)模擬陶瓷的模型,如圖 1-21 所示。

Feli 和 Asgari 對陶瓷-金屬復合材料結構的彈道性能進(jìn)行了數值分析[46],運用 JH-2陶瓷模型模擬氧化鋁陶瓷材料。Duane S. Cronin 等針對球體撞擊陶瓷材料的實(shí)例,運用約翰遜和霍爾姆奎斯特開(kāi)發(fā)的 JH-2 陶瓷模型在 LS-Dyna 中模擬陶瓷材料[47].XihongZhang 等人評估 PVB 夾層浮法玻璃對風(fēng)吹木材碎片沖擊的脆弱性[48],對層壓玻璃窗在重量和速度不同的木塊沖擊下的易損性進(jìn)行了實(shí)驗和數值模擬,該研究采用約翰遜霍爾姆奎斯特陶瓷本構模型來(lái)模擬玻璃,如圖 1-22 所示。

有限元模型,用 MAT_SILATED_GLASS 材料模型來(lái)定義材料屬性。該模型使用了玻璃和 PVB 模型的不同組合,如圖 1-23 模擬了事故中人頭撞擊玻璃的仿真圖,具有不同的連接類(lèi)型和兩種網(wǎng)格尺寸(5 毫米和 10 毫米),研究了玻璃斷裂應力對同一風(fēng)擋模型的影響[49].
哈工程大學(xué)胡文進(jìn)等人采用有限元軟件 ANSYS 建立了冰區玻璃鋼船舶與冰排的模型[50],如圖 1-24 所示。用 SHELLl63 單元模擬玻璃鋼鋪層,然后進(jìn)行船-冰碰撞的非線(xiàn)性有限元計算,研究在不同速度下玻璃鋼船與冰的碰撞情況。

1.4 研究現狀分析及總結
綜上所述,研究人員對自動(dòng)送料、靈巧手指、軟體結構、抓取模式、柔順構型、末端執行器等各方面的機械手進(jìn)行了廣泛研究,由于結構、材料等方面的不同,每種機械手都有適合的領(lǐng)域,各有優(yōu)勢和不足之處,如表 1-1 所示。 而對于薄壁易碎環(huán)狀件,材料的抗拉能力遠低于抗壓能力,采用外部包絡(luò )抓取的安全裕度更高;而采用內撐式抓取模式時(shí),更容易使其碎裂,其作業(yè)可靠性更低。研究薄壁易碎環(huán)狀件的機械手內撐式抓取模式存在更大的技術(shù)難度與挑戰。而由于某些特定作業(yè)對象與作業(yè)空間的限制,機械手又必須采用內撐式抓取模式。
近年來(lái),研究人員在機械手的手指構型[51]、力/位混合控制[52]、動(dòng)態(tài)抓取[53]等方面均進(jìn)行了一定的探討。根據人手生物結構特征設計的仿人靈巧機械手具有代表性,結合基于視覺(jué)、觸覺(jué)、力位傳感的反饋控制系統可以進(jìn)行復雜的軌跡規劃,以實(shí)現多手指的靈活控制[54-56],國內外技術(shù)比較成熟,是最可能應用于易碎件作業(yè)的執行器。但其結構復雜及控制難度高,因此限制了其作為末端執行器在工業(yè)生產(chǎn)中的應用。并且,目前對機械手的作業(yè)研究較少涉及易碎件的高速內撐式抓取[57-58],以及研究夾持器與作用對象間的交互模型、構型與剛度匹配。

有關(guān)于脆性材料碰撞沖擊的方法研究,由于陶瓷等許多脆性材料所固有的韌性低、易發(fā)生脆性斷裂的缺點(diǎn),使得在應用中需要對其抗沖擊等多方面性能進(jìn)行研究。目前已有的數值模擬研究方法中,有些學(xué)者采用有限元法(FEM)來(lái)模擬陶瓷,但不能很好地模擬沖擊過(guò)程中易碎件的破碎以及易碎件的碎片對外體的磨蝕;SPH 方法適合脆性材料受沖擊后破碎粉末的運動(dòng)類(lèi)似于流體的模擬;而有限元模擬易碎件受沖擊過(guò)程,最常用的是基于 JH-2 本構模型進(jìn)行建模[59],因為該模型包含了脆性材料的大變形、脆性破壞、高壓效應和應變率,能夠有效地模擬易碎件的材料特性。
1.5 主要研究?jì)热?/strong>
1.5.1 研究目標與內容
為了解決脆性材料生產(chǎn)中存在的難題,實(shí)現自動(dòng)化和智能化生產(chǎn),設計出一種內撐式抓取的機械手構型,具體工作如下:
(1)緒論。首先介紹課題的研究背景和意義,然后從上料機械手、靈巧機械手、柔順和軟體構型機械手、末端執行器機械手等幾個(gè)方面介紹機械手的國內外發(fā)展現狀, 并分析了國內外易碎件碰撞的研究方法。
(2)機械手總體結構設計。針對脆性材料易碎的材料特性,以人造金剛石合成原料葉蠟石塊生產(chǎn)工藝要求為例,根據其安裝位置及工作空間限定,采用內撐式抓取模式,設計了一款適用的薄壁圓柱易碎件的內撐式抓取與下壓裝配機械手,在對其整體構型進(jìn)行設計的基礎上,對關(guān)鍵部位-機械手手指機構設計進(jìn)行了詳細地介紹與分析,并詳細分析不同的控制系統驅動(dòng)機械手的利弊。
(3)等速驅動(dòng)的機械手參數優(yōu)化。對機械手構型進(jìn)行運動(dòng)學(xué)分析,根據優(yōu)化目標建立結構優(yōu)化的數學(xué)模型,按照設計目標,基于遺傳算法理論,編寫(xiě)相應程序對手指體的結構參數進(jìn)行優(yōu)化。 (4)易碎件的柔順機械手抓取作業(yè)沖擊仿真分析。針對機械手指抓取易碎件過(guò)程中的碰撞沖擊問(wèn)題,運用 SolidWorks、Hyperworks、LS-DYNA 軟件進(jìn)行集成建模仿真,研究機械手抓取薄壁易碎件的構型與剛度匹配設計理論,分析柔性機械手的構型、材料、剛度、運動(dòng)參數等對抓取作業(yè)過(guò)程的影響規律。
(5)薄壁易碎件柔順內撐式機械手樣機試制與實(shí)驗。搭建薄壁易碎件內撐式上料機械手實(shí)驗樣機,設計適應作業(yè)環(huán)境的控制系統,驗證機構的正確性。 (6)總結與展望。對全文進(jìn)行概括總結,并分析工作中的不足之處,對本課題中機械手的未來(lái)研究方向做出歸納和展望。
1.5.2 論文框架
論文的整體框架如圖 1-25 所示。

第二章 機械手總體結構設計
2.1 引言
2.2 機械手功能要求分析與運動(dòng)實(shí)現
2.3 機械手手指構型設計
2.4 手指驅動(dòng)系統設計與比較
2.4.1 等速氣缸驅動(dòng)
2.4.2 等壓氣缸驅動(dòng)
2.4.3 伺服電機驅動(dòng)
2.5 本章小結
第三章機械手參數優(yōu)化
3.1 引言
3.2 優(yōu)化問(wèn)題的提出
3.3 內撐式機械手手指運動(dòng)模型構建
3.4 基于遺傳算法求解機械手機構參數優(yōu)化模型
3.4.1 機械手機構優(yōu)化模型的建立
3.4.2 遺傳算法的基本思想及其步驟
3.4.3 遺傳算法的關(guān)鍵參數
3.5 優(yōu)化設計實(shí)例及其結果分析
3.5.1 基本參數賦值
3.5.2 優(yōu)化過(guò)程與結果
3.6 本章小結
第四章 機械手抓取易碎件沖擊仿真分析
4.1 引言
4.2 仿真分析的理論基礎
4.2.1 相關(guān)軟件介紹
4.2.2 有限元基本理論
4.3 集成建模仿真技術(shù)關(guān)鍵
4.4 機械手抓取易碎件的作業(yè)沖擊過(guò)程的數值模擬理論基礎
4.4.1 脆性材料力學(xué)性能研究
4.4.2 機械手穩定轉運物料加持力的計算
4.4.3 材料模型及參數選擇
4.4.4 沙漏控制和接觸模型的定義
4.4.5 機械手指碰撞易碎件邊界條件及施加載荷
4.4.6 機械手指碰撞易碎件基本控制方程
4.5 內撐式機械手指抓取易碎件作業(yè)碰撞仿真分析
4.5.1 正交仿真實(shí)驗中的內外表面設計
4.5.2 單因素仿真設計
4.5.2 單因素仿真結果分析
4.5.3 仿真結果的討論與對作業(yè)過(guò)程的優(yōu)化改良
4.6 本章小結
第五章 薄壁易碎件柔性?xún)葥问綑C械手樣機試制與實(shí)驗
5.1 引言
5.2 薄壁易碎件內撐式機械手控制系統總體方案
5.3 控制系統的硬件方案設計
5.3.1 電機的選型
5.3.2 運動(dòng)控制卡選型
5.4 控制軟件方案設計
5.4.1 上料機械手控制系統功能介紹
5.4.2 薄壁易碎件內撐式上料機械手控制系統運行模塊設計
5.5 薄壁內撐式上料機械手樣機實(shí)驗
5.6 本章小結
第六章 總結與展望
6.1 研究工作總結
本文在實(shí)驗室原有上料機械手的基礎上,在國家自然科學(xué)基金(52075500)《薄壁易碎件內撐式高速作業(yè)柔順機械手剛度-構型匹配設計與運動(dòng)創(chuàng )成研究》的資助下,圍繞薄壁易碎件高速上料機械手這一課題開(kāi)展了相關(guān)研究。通過(guò)分析作業(yè)對象葉蠟石環(huán)、葉蠟石塊的力學(xué)特征,制定了相應的總體設計方案,并對該機械手系統的手指構型和結構參數進(jìn)行了優(yōu)化設計,對機械手和易碎件之間的碰撞過(guò)程進(jìn)行了仿真分析。最后,按照設計方案制作了機械手樣機,搭建了機械手抓取葉蠟石環(huán)的實(shí)驗平臺,并開(kāi)展了相關(guān)實(shí)驗,驗證了薄壁易碎件內撐式柔順機械手結構方案的可行性和高效性。
本文主要的研究?jì)热莺徒Y論如下:
(1)對國內外各類(lèi)上料機械手進(jìn)行了調研,對于特殊應用領(lǐng)域的靈巧機械手、柔順機械手、軟體機械手等,國內外學(xué)者進(jìn)行了較為深入的研究,但針對薄壁易碎件高速上料機械手的研究卻相對滯后,目前并沒(méi)有可以實(shí)現工業(yè)化應用的機械手裝置。以生產(chǎn)金剛石的原料-葉蠟石塊為例,存在生產(chǎn)過(guò)程機械化程度低,人工操作容易破碎等問(wèn)題,難以實(shí)現高速作業(yè)的應用需求。因此,本文通過(guò)分析葉蠟石環(huán)的形狀、材料特性、作業(yè)空間等多方面的因素,提出了內撐式的夾持方式,并結合機械手設計的基本理論和仿生學(xué)原理,原創(chuàng )性地設計了一種用于薄壁易碎件內撐式上料作業(yè)的柔順機械手構型,并利 用相關(guān)軟件完成了該機械手三維模型的構建。
(2)在內撐式柔順機械手整體構型設計的基礎上,建立了機械手系統運動(dòng)學(xué)模型,并對其進(jìn)行了運動(dòng)學(xué)分析,對機械手各結構參數與手指末端速度、加速度運動(dòng)關(guān)系進(jìn)行了求解,驗證了初始設計方案和結構參數的可行性。在此基礎上建立了數學(xué)模型,并運 用遺傳算法優(yōu)化機械手關(guān)鍵結構參數,提高了機械手抓取易碎件的可靠性和高效性。
(3)在分析易碎件彈性模量、密度等關(guān)鍵力學(xué)特性的基礎上,通過(guò) SolidWorks、heperworks、LS-DYNA 等軟件建立了薄壁易碎件內撐式上料機械手的有限元模型,對柔順機械手和易碎件之間的碰撞過(guò)程進(jìn)行了仿真分析。計算結果表明,薄壁易碎件受到的最大應力值小于材料的許用拉伸應力值,證明機械手的結構和材料設計滿(mǎn)足薄壁易碎件的作業(yè)要求,設計方案合理;在此基礎上研究了不同搭建組合的軟、硬手指骨骼結構、抓取位置等因素在作業(yè)過(guò)程中對內力和形變的影響規律,進(jìn)而確定了一組最佳的手指骨結構和材料形貌特征。
(4)最后,根據薄壁易碎件葉蠟石環(huán)的作業(yè)要求和特點(diǎn),對控制系統的整體方案進(jìn)行了設計,對于控制系統的關(guān)鍵硬件進(jìn)行了選型和研究。基于控制系統的運行方式,設計和編寫(xiě)了機械手系統水平、豎直運動(dòng)以及手指張合運動(dòng)的控制程序,搭建了實(shí)驗樣機和實(shí)驗平臺,并開(kāi)展了相關(guān)的葉蠟石環(huán)抓取實(shí)驗,最終驗證了該薄壁易碎件內撐式柔順機械手控制系統和結構方案的可行性。
6.2 研究展望
本文針對薄壁易碎件高速作業(yè)所面臨的科學(xué)與技術(shù)難題,設計的薄壁易碎件內撐式上料機械手硬件和軟件系統在實(shí)際應用中基本滿(mǎn)足使用要求,提出的優(yōu)化結構和手指骨設計方案得到了驗證,達到了預期的效果。但是該機械手在某些方面還存在著(zhù)一些缺點(diǎn)和不足,需要進(jìn)一步地改進(jìn)和完善,主要包括:
(1)在抓取易碎件的作業(yè)過(guò)程中,會(huì )存在機械手與運動(dòng)工件稍有錯位的情況,如果機械手系統沒(méi)有像手腕一樣的自動(dòng)位置調節空間,不能自適應補償位移偏差,機械手硬施力會(huì )造成易碎件的破損。
(2)本文選用橡膠作為軟性手指的彈性材料,也可以選用不同的材料,如 PVB 聚乙烯醇縮丁醛、硅膠等彈性材料,在抓取過(guò)程中,不同材料與易碎件之間產(chǎn)生的摩擦力及抗沖擊能力也會(huì )有所不同,需要進(jìn)一步的實(shí)驗和仿真研究。
(3)由于本文研究的對象葉蠟石環(huán)與葉蠟石塊的內壁都是直徑相同的圓形內壁,因此設計一個(gè)機械手就可以完成整個(gè)上料過(guò)程的作業(yè)要求。但如果該機械手抓取內徑大小不一樣的易碎件,會(huì )出現曲率半徑不一致的情況,導致該機械手指端與作業(yè)工件無(wú)法完全貼合,進(jìn)而增大易碎件受到的應力值,這在高速作業(yè)過(guò)程中會(huì )增大易碎件破裂的可能性。因此,針對特定尺寸的作業(yè)工件需要設計相應尺寸規格的機械手結構,或者通過(guò)改進(jìn)機械手爪的設計方案來(lái)提高機械手的通用性。
參考文獻
[1] Piazza C, Grioli G, Catalano M G, et al. A century of robotic hands [J]. Annual Review ofControl, Robotics, and Autonomous Systems, 2019, 2: 1-32.
[2] Psomopoulou E, Karashima D, Doulgeri Z, et al. Stable pinching by controlling fingerrelative orientation of robotic fingers with rolling soft tips[J]. Robotica, 2018, 36(2):204-224.
[3] 宋允曉, 張明輝, 張健健。 基于 PLC 控制的智能機械手的設計[J]. 液壓與氣動(dòng), 2012,000(011):1-4.
[4] 林峰。 超硬材料的研究進(jìn)展[J]. 新型工業(yè)化, 2016, 6(3): 28-52.
[5] Mizukawa, M. Robot technology (RT) trend and standardization[C]. Advanced Roboticsand its Social Impacts, 2005. IEEE Workshop on IEEE, 2005, Nagoya, Japan, June 12-15,2005: 249-253.
[6] 顧以進(jìn)。 鈑金沖壓自動(dòng)上下料機械手的研究與開(kāi)發(fā)[D].哈爾濱:哈爾濱工業(yè)大學(xué),2015.
[7] 于衍偉,張祥林,韓松,等。 適于中小型沖床的經(jīng)濟型自動(dòng)送料機械手研制[J]. 鍛壓技術(shù), 2011, 36(6): 66-69.
[8] 張永春,黃杰,王海因,等。自動(dòng)上料系統在汽車(chē)風(fēng)窗玻璃安裝中的應用[J].汽車(chē)實(shí)用技術(shù),2020,45(21):188-191.
[9] 楊麗。 基于視覺(jué)引導的層壓機上料機械手關(guān)鍵技術(shù)研究[D].秦皇島:河北科技師范學(xué)院,2020.
[10] 蔡世波,陶志成,萬(wàn)偉偉,等。機器人多指靈巧手的研究現狀、趨勢與挑戰[J/OL].機械工程學(xué)報,2021,57:1-14[2021-03-15].
http://kns.cnki.net/kcms/detail/11.2187.TH.20210304.1553.094.html.
[11] J. Shintake, S. Rosset, B. Schubert, et al. Versatile soft grippers with intrinsicelectroadhesion based on multifunctional polymer actuators[J]. Advanced Materials,2016, 28(2):231-238.
[12] Ciocarlie M, Hicks F M, Holmberg R, et al. The Velo gripper: A versatile single-actuatordesign for enveloping, parallel and fingertip grasps[J]. The International Journal ofRobotics Research, 2014, 33(5):753-767.
[13] Máximo A. Roa, Raúl Suárez. Finding locally optimum force-closure grasps[J]. Roboticsand Computer-Integrated Manufacturing, 2009, 25(3):536-544.
[14] Sintov A, Shapiro A. Dynamic regrasping by in-hand orienting of grasped objects usingnon-dexterous robotic grippers[J]. Robotics and Computer-Integrated Manufacturing,2018, 50:114-131.
[15] Vincent Babin, David St-Onge, Clément Gosselin. Stable and repeatable grasping of flatobjects on hard surfaces using passive and epicyclic mechanisms[J]. Robotics andComputer Integrated Manufacturing, 2019, 55:1-10.
[16] Faudzi A A M, Ooga J, Goto T, et al. Index finger of a human-like robotic hand using thinsoft muscles[J]. IEEE Robotics & Automation Letters, 2018, 3(1):92-99.
[17] Grebenstein M, Albu-Sch?ffer A, Bahls T, et al. The DLR hand arm system[C].Roboticsand Automation (ICRA), 2011 IEEE International Conference on IEEE, 2011, Shanghai,China, May 9-13, 2011: 3175-3182.
[18] Jacobsen S C, Iversen E K, Knutti D F, et al. Design of the Utah/M.I.T. DextrousHand[C]// Robotics and Automation. Proceedings. 1986 IEEE International Conferenceon. IEEE, 1986,3:1520-1532.
[19] Bridgwater L B, Ihrke C A, Diftler M A, et al. The Robonaut 2 hand designed to do workwith tools[J]. Proceedings IEEE International Conference on Robotics and Automation,2012:3425-3430.
[20] Ito K, Sueishi T, Yamakawa Y, et al. Tracking and recognition of a human hand indynamic motion for Janken (rock-paper-scissors) robot[C]// 2016 IEEE InternationalConference on Automation Science and Engineering (CASE)。 IEEE, 2016:891-896.
[21] 張元飛,劉伊威,金明河,等。 基于連桿力矩傳感器動(dòng)態(tài)補償的機器人靈巧手笛卡兒阻抗控制[J]. 機器人, 2012, 34(1):22-31.
[22] Liu H , Wu K , Meusel P , et al. Multisensory five-finger dexterous hand: The DLR/HITHand II[C]// Proc IEEE/RSJ Int Conference on Intelligent Robots & Systems. 2008.
[23] Hirzinger, G. Advances in Robotics: The DLR Experience[J]. International Journal ofRobotics Research, 1999, 18(11):1064-1087.
[24] 謝宇倫。多指靈巧手 DORAHAND[J].設計,2021,34(02):99-101.
[25] 王志恒,錢(qián)少明,楊慶華,等。氣動(dòng)機器人多指靈巧手 --ZJUT Hand[J].機器人,2012,34(02):223-230.
[26] WANG Zhiheng,ZHANG Libin,BAO Guanjun,et al. Pneumatic robot multi-fingered dexterous hand-ZJUT Hand[J]. Journal of Central South University,2011,18(4):1105-1114.
[27] Zhu L, Wang W, Tao Z, et al. Full-Drive Decoupled Bionic Finger: Structure andExperimental Trials[C]// 2019 IEEE International Conference on Robotics andBiomimetics (ROBIO)。 IEEE, 2019:497-502.
[28] Ouyang G, Zhu X, Ju Z, et al. Dynamical Characteristics of Surface EMG Signals ofHand Grasps via Recurrence Plot[J]. IEEE Journal of Biomedical & Health Informatics,2014, 18(1):257-265.
[29] Fang Yinfeng, Zhou Dali, Li Kairu, et al. Interface Prostheses With Classifier-FeedbackBased User Training[J].IEEE TRANSACTIONS ON BIOMEDICALENGINEERING,2017, 64(11): 2575-2583.
[30] 田利梅,王宏,曾崢,項光清,陳杰。高精度 LNG 自動(dòng)加液機器人被動(dòng)柔順結構設計[J].機器人產(chǎn)業(yè),2019(05):32-37.
[31] 苗玉彬,鄭家豐。 蘋(píng)果采摘機器人末端執行器恒力柔順機構研制[J].農業(yè)工程學(xué)報,2019,35(10):19-25.
[32] Kang Brian Byunghyun, Choi Hyungmin, Lee Haemin, et al. Exo-Glove Poly II: APolymer-Based Soft Wearable Robot for the Hand with a Tendon-Driven ActuationSystem.[J]. Soft robotics,2019,6(2):1-13. [33] Nycz CJ, Bu tzer T, Lambercy O, et al. Design and char-acterization of a lightweight andfully portable remote ac-tuation system for use with a hand exoskeleton[J]. IEEE RobotAutom Lett 2016,1(2):976-983.
[34] Yun Y, Agarwal P, Fox J, et al. Accurate torque control of finger joints with UT handexoskeleton through Bowden cable SEA[C]// 2016 IEEE/RSJ International Conferenceon Intelligent Robots and Systems (IROS)。 IEEE, 2016:390-397.
[35] Jones CL, Morrison FWR, Sarkar N, et al. Design and development of the cable actuatedfinger exoskeleton for hand rehabilitation following stroke[J]. IEEE Trans Mecha-tron2014,19(1):131-140.
[36] Sarakoglou I, Brygo A, Mazzanti D, et al. HEXOTRAC: A highly under-actuated handexoskeleton for finger tracking and force feedback[C]// IEEE/RSJ InternationalConference on Intelligent Robots & Systems. IEEE, 2016:1033-1040.
[37] Xu K, Liu Z, Zhao B, et al. Composed continuum mechanism for compliant mechanicalpostural synergy: An anthropomorphic hand design example[J]. Mechanism andMachine Theory, 2019, 132:108-122.
[38] She Y, Li C , Cleary J, et al. Design and Fabrication of a Soft Robotic Hand WithEmbedded Actuators and Sensors[J]. Journal of Mechanisms and Robotics, 2015,7(2):21007-1-21007-9.
[39] O.Bruneau, F.B.Ouezdou, J.G. Fontaine. Dynamic walk of a bipedal robot havingflexible feet[C]. In Proc. IEEE Int. Conf. Intell. Robots Syst., Maui, HI, USA ,2001:512-517.
[40] H. Ishihara, T. Nagayama, H. Tomori, T. Nakamura. Landing method for a one-leggedrobot with artificial muscles and an MR brake[C].In Proc. 41st Annu. Conf. IEEE Ind.Elec. Soc., IECON 2015, Yokohama, Japan, 2015:1879-1884.
[41] 張進(jìn)華,王韜,洪軍,王煜。軟體機械手研究綜述[J].機械工程學(xué)報,2017,53(13):19-28.
[42] S. Hauser, P. Eckert, A. Tuleu, A. Ijspeert. Friction and damping of a compliant footbased on granular jamming for legged robots[C].In Proc. 6th IEEE RAS/EMBS Int. Conf.Biomed. Robot. Biomechatronics, UTown, Singapore , 2016:1160-1165.
[43] Rathod S, Tiwari G, Chougale D. Ballistic performance of ceramic-metal compositestructures[J]. Materials Today: Proceedings, 2020,41(5):1125-1129.
[44] Bresciani L M, Manes A, Romano T A, et al. Numerical modelling to reproducefragmentation of a tungsten heavy alloy projectile impacting a ceramic tile: Adaptivesolid mesh to the SPH technique and the cohesive law[J]. International Journal of ImpactEngineering, 2016, 87(2):3-13.
[45] 吳和成,肖毅華。陶瓷和仿珍珠母陶瓷/聚脲復合結構的沖擊損傷對比[J].高壓物理學(xué)報,2020,34(02):75-81.
[46] Huang C Y, Chen Y L. Design and impact resistant analysis of functionally graded Al 2 O3 -ZrO 2 ceramic composite[J]. Materials and Design, 2016, 91(2):294-305.
[47] Cronin D S, Bui K, Kaufmann C, et al. Implementation and validation of theJohnson-Holmquist ceramic material model in LS-Dyna[C]//Proc. 4th Eur. LS-DYNAUsers Conf. 2003, 1: 47-60.
[48] Xihong, Zhang, Hong. Laboratory test and numerical simulation of laminated glasswindow vulnerability to debris impact[J]. International Journal of Impact Engineering,2013,55(1),49-62.
[49] Yong P, Yang J, Deck C, et al. Finite element modeling of crash test behavior forwindshield laminated glass[J]. International Journal of Impact Engineering, 2013, 57(7):27-35.
[50] 胡文進(jìn), 倪寶玉, 白曉龍,等。 基于非線(xiàn)性有限元法的冰區玻璃鋼實(shí)驗船碰撞性能研究[J]. 振動(dòng)與沖擊, 2018, 37(14):262-268,276.
[51] Devi M A, Udupa G, Sreedharan P. A novel underactuated multi-fingered soft robotichand for prosthetic application[J]. Robotics and Autonomous Systems, 2018,100(3):267-277.
[52] Barbalata C, Dunnigan M W, Petillot Y. Position/force operational space control forunderwater manipulation[J]. Robotics and Autonomous Systems, 2018, 100(3):150-159.
[53] Sintov A, Shapiro A. Dynamic regrasping by in-hand orienting of grasped objects usingnon-dexterous robotic grippers[J], Robotics and Computer-Integrated Manufacturing,2018,50(8): 114-131.
[54] Mizukawa, M. Robot technology (RT) trend and standardization[C]. Advanced Roboticsand its Social Impacts, 2005. IEEE Workshop on IEEE, 2005, Nagoya, Japan ,2005:249-253.
[55] 于衍偉, 張祥林, 韓松,等。 適于中小型沖床的經(jīng)濟型自動(dòng)送料機械手研制[J].鍛壓技術(shù), 2011, 36(6): 66-69.
[56] 張忠雷, 金振林, 張金柱。 新型送料機械手及其工作空間分析[J].中國機械工程,2016, 27(13): 1743-1747.
[59] 蔣國平,孟凡昌,申景金,等。軟體機器人運動(dòng)學(xué)與動(dòng)力學(xué)建模綜述[J].南京郵電大學(xué)學(xué)報(自然科學(xué)版), 2018, 38(1): 20-26.
[60] Psomopoulou E, Karashima D, Doulgeri Z, et al. Stable pinching by controlling fingerrelative orientation of robotic fingers with rolling soft tips[J]. Robotica, 2018, 36(2):204-224.
[59] 曹陽(yáng), 張丹丹, 劉建秀,等。 Ti/Al_3Ti 疊層復合材料沖擊損傷建模及失效分析[J]. 兵器材料科學(xué)與工程, 2019,294(03):122-127.
[60] 王良文,王團輝,穆亞林,孟凡念,錢(qián)厚鵬,單子峰。圓柱內壁工件的內撐式抓取與裝配機械手設計[J].機械傳動(dòng),2019,43(09):166-170.
[61] Wang L W, Wang T H, Mu Y L, et al. The Bionic Configuration of Loading FlexibleManipulator Based the Inner Bracing Grab Method[C]. 2018 International Conference on Robots & Intelligent System (ICRIS)。 IEEE Computer Society, 2018:513-516.
[62] 王良文,張薇薇,穆亞林,等。圓柱內壁件下壓裝配機械手結構實(shí)現及彈簧參數優(yōu)選[J].機械傳動(dòng),2021,45(01):146-151.
[63] Aimee Cloutier, James Yang. Grasping Force Optimization Approaches forAnthropomorphic Hands[J]. Journal of Mechanisms and Robotics, 2018, 10(1): 011004.
[64] 朱佳棟,蘇少輝,陳昌,劉桂英。面向產(chǎn)品配置設計的改進(jìn)交互式遺傳算法[J].中國機械工程,2018,29(20):2474-2478.
[65] 石飛,趙詩(shī)奎。基于工序約束鏈編碼的遺傳算法求解產(chǎn)品綜合調度問(wèn)題[J].中國機械工程,2017,28(20):2483-2492.
[66] 李巖,袁弘宇,于佳喬,張更偉,劉克平。遺傳算法在優(yōu)化問(wèn)題中的應用綜述[J].山東工業(yè)技術(shù),2019(12):242-243+180.
[67] 馮穎。 無(wú)線(xiàn)傳感器網(wǎng)絡(luò )的覆蓋控制算法研究[D].太原:太原科技大學(xué),2020.
[68] 李海輪。 安全儀表系統的維修策略?xún)?yōu)化及應用[D].北京:華北電力大學(xué),2017.
[69] 呂乃冰。 基于深度強化學(xué)習的智能決策模型研究[D].北京:北京交通大學(xué),2020.
[70] 郭駟偉。 基于物聯(lián)網(wǎng)的城市配送體系構建研究[D].沈陽(yáng):沈陽(yáng)工業(yè)大學(xué),2017.
[71] 曹亞杰。 改進(jìn)遺傳模擬退火算法及其在結構損傷識別中的應用[D].邯鄲:河北工程大學(xué),2013.
[72] Yao R, Su F , Mao R . Influence of interfacial bonding conditions on the anti-penetrationperformance of ceramic/metal composite targets [J]. International Journal of Mechanicsand Materials in Design, 2019, 15(4):833-844.
[73] 李雄,姜秋來(lái),申龍章。基于傳統的玻璃破碎機優(yōu)化改進(jìn)設計[J].機械研究與應用,2020,33(02):132-134.
[74] 郭建。 基于仿真分析的發(fā)動(dòng)機機體微動(dòng)疲勞基礎研究[D].太原:中北大學(xué),2012.
[75] 金宗哲。 脆性材料力學(xué)性能評價(jià)與設計[M]. 中國鐵道出版社, 1996:23-26. [76] 尹斌華, 蘇承東, 馬紅安,等。 葉蠟石常規三軸壓縮下力學(xué)性能的實(shí)驗研究[J]. 超硬材料工程, 2007, 019(002):16-19.
[77] 王澤鵬。 ANSYS 14.5/LS-DYNA 非線(xiàn)性有限元分析實(shí)例指導教程[M]. 機械工業(yè)出版社, 2011:89-90. [78] Anderson C E, Royal-Timmons S A. Ballistic performance of confined 99.5%-Al2O3ceramic tiles[J]. International Journal of Impact Engineering, 1997, 19(8):703-713.
[79] Holmquist T J, Johnson G R, Grady D E, et al. High strain rate properties and constitutive Modelling of glass[J]. Glass, 1995, 1:163-165.
[80] Deborah L. Bakowski,Susan T. Davis, William F Moroney. Reaction Time and GlanceBehavior of Visually Distracted Drivers to an Imminent Forward Collision as a Functionof Training,Auditory Warning,and Gender[J]. Procedia Manufacturing, 2015, 3(1):3238. 3245.
[81] Zhang X, Hao H. Laboratory test and numerical simulation of laminated glass windowresponse to impact and blast loads[C]// The 9th international conference on shock andimpact loads on structures. 2011:705-714.
[82] Abe K, Nishigaki H, Ishivama S I, et al. Collapse of Thin-Walled Curved Beam withClosed-Hat Section - Part 2: Simulation by Plane Plastic Hinge Model[C]// SaeTransactions. 1990:13-21.
[83] 吳和成。 陶瓷/聚脲復合結構抗沖擊性能的數值模擬研究[D].南昌:華東交通大學(xué),2020.
致 謝
馬上要畢業(yè)了,有諸多感慨。說(shuō)來(lái)話(huà)長(cháng),自從考研失利以后,自信心遭到了重創(chuàng ),雖然調劑學(xué)校的時(shí)候收到了很多通知書(shū),但是還是覺(jué)得自己挺笨的,以后讀博的道路也到此為止了。調劑學(xué)校時(shí),通過(guò)網(wǎng)上了解,對王良文教授做的方向很感興趣,最后也如愿成為王良文教授的學(xué)生。但是對于未來(lái),自己是沮喪的,做什么事都沒(méi)有太大的動(dòng)力,因此工作效率也很低,但是很長(cháng)一段時(shí)間以后,經(jīng)過(guò)接觸,王良文教授和王團輝師兄認真做科研的態(tài)度,讓我發(fā)自?xún)刃牡木磁澹腥镜轿摇T谖业难壑校趿嘉慕淌诤軜闼兀埠芫礃I(yè),到了大家認為快退休的年紀,依然保持著(zhù)對科研的熱愛(ài),每時(shí)每刻想著(zhù)科研問(wèn)題,總是會(huì )有很多好的想法,沉浸在其中,感覺(jué)老師搞科研的時(shí)候是幸福的,那個(gè)時(shí)候才意識到,自己沉浸在一時(shí)的得失有多么愚蠢,慢慢有了動(dòng)力和信心。碩導對自己的影響是深遠的,特別感謝自己能夠遇到這么一位可敬又可愛(ài)的老師,讓我學(xué)到了很多珍貴的品格。希望自己能在科研的道路上走得更遠,有一天成為王良文教授這樣的人,我會(huì )為此更加努力的。王團輝師兄,他給予了我很大的幫助,無(wú)論什么問(wèn)題,他總是會(huì )耐心地解答,踏實(shí)認真的科研態(tài)度,是我感受最深的一點(diǎn)。師娘和師姐,總是在見(jiàn)面的時(shí)候給予我們肯定,鼓勵我們前行。張繼豪、張士釗等各位師弟們,會(huì )一起認真地討論一些科研過(guò)程中出現的問(wèn)題,很喜歡這種氛圍,各抒己見(jiàn),一起學(xué)習,不忙的時(shí)候大家也會(huì )一起開(kāi)玩笑,活躍氣氛。自己的另一半劉方圓同志,是我的良師益友,教會(huì )我很多道理,讓我學(xué)會(huì )了獨處,內心變得更加強大,幫助我成長(cháng)。總之,這三年學(xué)會(huì )了很多,也因為他們的存在感到開(kāi)心、滿(mǎn)足,我是幸運的。希望大家都會(huì )越來(lái)越好,希望老師能照顧好自己的身體,師弟們能走向想要的人生軌跡。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)