24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
’™ “™
°°°°Œ“ᯓ—≥…ûÈ∑¨«—µƒ◊Ó¥Ûµƒ…˙Æa(ch®£n)≈c≥ˆø⁄ᯣ¨π˚ þµƒºæπù–‘≤…’™£¨ï˛(hu®¨ )‘Ï≥…÷Ð∆⁄–‘µƒÑ⁄Ñ”(d®∞ng)¡¶ º±»±°¢Ñ⁄Ñ”(d®∞ng)¡¶≥…±æÕª‘ˆ£¨èƒ∂¯‘ˆº”¡Àπ˚ þµƒ∑N÷≤…˙Æa(ch®£n)≥…±æ°£“Ú¥Àå¶∑¨«—≤…’™ôC–µµƒ—–æø≥… ûÈ¡À÷«ª€ÞròI(y®®)∞l(f®°)’πµƒ÷ÿ“™∑ΩœÚ÷Æ“ª°£≤…’™ôC–µ ÷◊˜ûÈπ˚ þ ’´@Óê(l®®i)ôC∆˜»Àµƒƒ©∂ÀàÖ–∆˜ «’˚ ÇÄ(g®®)≤…’™œµΩyµƒ÷ÿ“™ΩM≥…≤ø∑÷£¨ôC–µ ÷µƒ≤…’™ƒÐ¡¶÷±Ω””∞Ìë¡À’˚ÇÄ(g®®)ÛwΩyµƒàÖ––߬ £¨À˘“‘å¶ ≤…’™ôC–µ ÷µƒ‘O”ã « ’´@ôC∆˜»À—–∞l(f®°)µƒ÷ÿ“™≠h(hu®¢n)πù°£‘⁄øÇΩY¡ÀÆî«∞≤…’™ôC–µ ÷‘⁄á¯É»Õ‚µƒ∞l(f®°) ’π¨FÝÓ£¨“‘◊Ó¥ÛœÞ∂»µƒ±£◊o∑¨«—π˚åç(sh®™)≤ª ÐìpÇ˚ûÈ‘O”ãƒøòÀ£¨ Ð∑¨«—µƒ÷≤ŒÔåW(xu®¶)Ãÿ’˜Ü¢∞l(f®°)£¨◊Ò —≠∑¨«—◊‘»ª…˙ÈL(ch®¢ng)∑±—Г鬅£¨“‘ TRIZ Ñì(chu®§ng )–¬‘O”ã¿Ì’ìûÈðo÷˙π§æþ£¨‘O”ã≥ˆ¡À“ª∑Nå¢◊˜”√¡¶ © º””⁄∑¨«—Ω€π£…˙ÈL(ch®¢ng)πù¸c(di®£n)µƒ∑¨«—≤…’™ôC–µ ÷°£≤¢Õ®þ^(gu®∞)ƒ£îM∑¬’Ê°¢ò”ôC‘áÚûµ»∑Ω Ωå¶∑¨«—≤…’™ ôC–µµƒ‘O”ã∫œ¿Ì–‘∫Õ≤…’™–߬ þM(j®¨n)––¡ÀÚû◊C°£Úû◊CΩYπ˚±Ì√˜£¨À˘‘O”㵃∑¨«—≤…’™ôC–µ ÷þ_µΩ ¡À‘O”㵃ÓA∆⁄ƒøòÀ°£
°°°°±æ‘O”㵃Ñì(chu®§ng )–¬¸c(di®£n)‘⁄”⁄ôC–µ ÷≤…’™∑¨«—µƒ∑Ω Ω£¨Õ®þ^(gu®∞)å¶∑¨«—÷≤ŒÔåW(xu®¶)Ãÿ’˜µƒ—–æø∞l(f®°)¨F∑¨«— »~±˙≈cΩ€π£œýþBÃé”–“ª…˙ÈL(ch®¢ng)πù¸c(di®£n)£¨‘⁄þM(j®¨n)––≤…’™ïr(sh®™)∑¨«—胥Àπù¸c(di®£n)∑÷ÎxÀ˘–Ë¿≠¡¶◊Ó–°£ªÕ®þ^(gu®∞)≤… ’™∑¨«—ïr(sh®™)µƒ С¶∑÷Œˆø…÷™£¨≤…’™∑¨«—µƒÎy“◊≥Ã∂»≈c∑¨«—Ω€π£Õ¨…œºâ∑÷÷ßÈgµƒäAΩ«≥…’˝±»£¨ ∂¯ôC–µ ÷÷–µƒ∑÷ÎxôCòãƒÐâÚ‘ˆ¥Û∑¨«—Ω€π£≈c…œºâ∑÷÷ßÈgµƒÉA–±Ω«∂» π∑¨«—∏¸»ð“◊±ª≤…’™°£ À˘“‘‘O”ã¡À“ª∑NƒÐâÚº¥≤ªå¶∑¨«—π˚åç(sh®™) ©º”â∫¡¶”÷ƒÐ墑ìπù¸c(di®£n)∑÷Îxµƒ≤…’™ôC–µö‚»Àƒ©∂Ààà ––∆˜°£À˘‘O”ãôC–µ ÷å¢∑¨«—µƒ∂®ŒªôCòã≈cـ𣵃∑÷ÎxôCòã∑÷å”ΩY∫œµΩΩy“ªœµΩy÷–£¨—–æø≥ı ∆⁄“‘Œ¢–ÕÃé¿Ì∆˜ Arduino þM(j®¨n)––øÿ÷∆£¨Õ®þ^(gu®∞)’{πùôC–µ ÷÷–µƒ»˝ÇÄ(g®®)À≈∑˛ÎäôCÖf(xi®¶)Õ¨éßÑ”(d®∞ng)ôCòãþ\Ñ”(d®∞ng) ÅÌ(l®¢i)ÕÍ≥…‘O”㵃ÓA∂®≤…’™Ñ”(d®∞ng)◊˜°£
°°°°ÍP(gu®°n)ÊI‘~£∫≤…’™ôC∆˜»À£ªôC–µ ÷£ªþ\Ñ”(d®∞ng)∑¬’Ê£ª∑¨«—≤…’™
Abstract
°°°°China has become the largest producer and exporter of tomatoes. Seasonal picking of fruits and vegetables will cause periodic labor shortage and sudden increase of labor cost, which will increase the planting and production cost of fruits and vegetables. Therefore, the research on Tomato Picking machinery has become one of the important directions of the development of intelligent agriculture. As the end effector of fruit and vegetable harvesting robot, picking manipulator is an important part of the whole picking system. The picking ability of manipulator directly affects the execution efficiency of the whole system. Therefore, the design of picking manipulator is an important link in the research and development of harvesting robot. After summarizing the current development status of picking manipulator at home and abroad, taking the maximum protection of tomato fruit from damage as the design goal, inspired by the botanical characteristics of tomato, following the natural growth and reproduction law of tomato, and taking TRIZ innovative design theory as an auxiliary tool, a tomato picking manipulator with force applied to the growth node of tomato Platycodon grandiflorum was designed. The design rationality and picking efficiency of Tomato Picking machinery were verified by simulation and prototype test. The verification results show that the designed tomato picking manipulator has achieved the expected goal of the design.
°°°°The innovation of this design lies in the way of picking tomatoes by manipulator. Through the study of tomato botanical characteristics, it is found that there is a growth node at the connection between tomato petiole and Platycodon grandiflorum. When picking, the pulling force required for tomato to separate from this node is the smallest; Through the stress analysis when picking tomatoes, it can be seen that the difficulty of picking tomatoes is directly proportional to the included angle between tomato Platycodon grandiflorum and its superior branch, and the separation mechanism of the manipulator can increase the inclined angle between tomato Platycodon grandiflorum and its superior branch, making tomatoes easier to be picked. Therefore, a pneumatic end effector of picking machinery is designed, which can not only not exert pressure on tomato fruit, but also separate the node. The designed manipulator combines the positioning mechanism of tomato and the separation mechanism of Platycodon grandiflorum into a unified system. In the early stage of the research, the micro processor Arduino is used to control, and the designed predetermined picking action is completed by adjusting the three servo motors of the manipulator to drive the mechanism movement together.
°°°°Keywords: picking robot; manipulator; Dynamic simulation; Tomato Picking

ƒø ‰õ
°°°°1 æw’ì
°°°°1.1 —–æøµƒƒøµƒ≈c“‚¡x
°°°°ì˛á¯ÎHºZÞrΩMøóΩy”㣨2018 ƒÍŒ“á¯ÀÆπ˚º∞ þ≤ÀÆa(ch®£n)¡ø“—’º»´«ÚÆa(ch®£n)¡øµƒ 50%,∆‰øÇÆa(ch®£n)¡ø ≥¨ 9.65 É|áç£¨æ” ¿ΩÁ ◊Œª[1].‘⁄π˚ þ…˙Æa(ch®£n)þ^(gu®∞)≥Ã÷–∂ý“¿Ÿá(l®§i)”⁄»ÀÜT∫ÕôC–µ√кؖÕÑ⁄Ñ”(d®∞ng)£¨‘⁄≤…’™ ’ÿõµƒþ^(gu®∞)≥Ã÷–≤…’™ôC–µº∞π§æþï˛(hu®¨ )å¶π˚ þ‘Ï≥…ìpÇ˚£¨”∞Ìë¡Àπ˚ þ≤…’™µƒ–߬ °£π˚ þµƒºæπù–‘ ≤…’™£¨ï˛(hu®¨ )‘Ï≥…÷Ð∆⁄–‘µƒÑ⁄Ñ”(d®∞ng)¡¶º±»±°¢Ñ⁄Ñ”(d®∞ng)¡¶≥…±æÕª‘ˆ£¨èƒ∂¯‘ˆº”¡Àπ˚ þµƒ∑N÷≤…˙Æa(ch®£n)≥…±æ°£ ûÈΩ‚õQ‘⁄π˚ þ≤…’™þ^(gu®∞)≥Ã÷–Ñ⁄Ñ”(d®∞ng)¡¶ÃÊ¥˙∫Õ÷∏þ…˙Æa(ch®£n)¬ µ»Üñ(w®®n)Ó}£¨∞l(f®°)’πþxìÒ–‘ ’´@ºº–g(sh®¥)£¨≥…ûÈ¡À á¯ÎHÞròI(y®®)ôC∆˜»Àºº–g(sh®¥)∫Õπ˚ þ ’´@ºº–g(sh®¥)µƒ÷ÿ“™—–æø∑ΩœÚ[2].
°°°°∑¨«— «»´«Úœ˚ŸM◊Ó∂ýµƒ þ≤À÷Æ“ª£¨“≤ «÷–á¯◊Ó÷ÿ“™µƒ≥ˆø⁄Éû(y®≠u)ÑðÞrÆa(ch®£n)∆∑÷Æ“ª£¨20 ¿ºo 90 ƒÍ¥˙≥ı£¨÷–᯵ƒ∑¨«—Æa(ch®£n)¡øÆa(ch®£n)á¯√¿á¯≥…ûÈ ¿ΩÁ◊Ó¥Ûµƒ∑¨«—≥…Æa(ch®£n)ᯰ£ì˛¬ì(li®¢n)∫œá¯ºZ ≥º∞ÞròI(y®®) ΩMøóΩy”ãîµì˛Ô@ 棨2018 ƒÍ÷–á¯∑¨«—Æa(ch®£n)¡øþ_ 6163.2 »f(w®§n)á磨ð^ 2017 ƒÍ‘ˆÈL(ch®¢ng) 203.6 »f(w®§n)áç°£‘⁄ …˙Æa(ch®£n)þ^(gu®∞)≥Ã÷–À˘Ñ⁄Ñ”(d®∞ng)¡¶’º’˚ÇÄ(g®®)þ^(gu®∞)≥õƒ 30%~60%,‘⁄á¯É»∑¨«—…˙Æa(ch®£n)µƒ≤…’™≠h(hu®¢n)πù÷˜“™“¿øø»À¡¶ ÕÍ≥…°£À˘“‘£¨—–æø∑¨«—…˙Æa(ch®£n)þ^(gu®∞)≥Ã÷–µƒ◊‘Ñ”(d®∞ng)≤…’™ºº–g(sh®¥)≈c—blj£¨å¢‘⁄æèΩ‚◊˜òI(y®®)π§»À»±∑¶°¢ΩµµÕ Ñ⁄Ñ”(d®∞ng)èä∂»°¢Ã·∏þÞròI(y®®)…˙Æa(ch®£n)–߬ °¢ΩµµÕ…˙Æa(ch®£n)≥…±æ°¢ÕÍ…∆ þπ˚∆∑Ÿ|(zh®¨)∫Õ¥_±£≤…’™π§◊˜∑Ω±„–‘µ»∑Ω √Êæþ”–∫Ð¥Ûµƒ∞l(f®°)’πø’Èg∫Õ –àˆ(ch®£ng)–Ë«Û[3].
°°°°Œ“á¯å¶∑¨«—≤…’™ôC–µµƒ—–æø∆≤Ωœýå¶ð^ÕÌ£¨∂¯«“”…”⁄≤…’™ïr(sh®™)π§◊˜≠h(hu®¢n)æ≥µƒèÕÎs–‘∫Õ≤…’™ 嶜۵ƒ∂ýò”–‘“‘º∞…˙Æa(ch®£n)“郣ªØð^µÕ°¢ π”√≥…±æ∏þµ»“ÚÀÿ£¨ πôC–µªØ◊˜òI(y®®)‘⁄∑¨«— ’´@≠h(hu®¢n)πùµƒ ∆’º∞ð^Îyåç(sh®™)¨F°£ª˘”⁄¥À£¨‘O”㓪∑N±£π˚ Ω≤¢æþ”–∏þ–߬ °¢µÕ≥…±æ°¢◊‘Ñ”(d®∞ng)ªØ≥Ã∂»∏þµ»Ãÿ¸c(di®£n)µƒ ≤…’™ôC–µ≥…ûÈ¡Àá¯É»Õ‚µƒ—–æøü·¸c(di®£n)[4-5].
°°°°1.2 π˚ þ≤…’™ôC–µá¯É»Õ‚—–æø¨FÝÓ
°°°°1.2.1 á¯Õ‚—–æø¨FÝÓ
°°°°á¯Õ‚‘⁄…œ ¿ºo 70 ƒÍ¥˙æÕÈ_(k®°i)’π¡À þ≤À≤…’™ôC∆˜»Àµƒ—–æø£¨±æ ¿ºo“‘ÅÌ(l®¢i)ÎS÷¯(zh®¥)ôC∆˜»Àºº–g(sh®¥) ∫Õ÷«ƒÐøÿ÷∆ºº–g(sh®¥)µƒ∞l(f®°)’π£¨œýÍP(gu®°n)—–æø»°µ√¡Àð^∂ýµƒ≥…π˚°£
°°°°1°¢“‘…´¡– FFRobotics π´Àæ—–∞l(f®°) FF ôC∆˜»À£¨»ÁàD 1-1a À˘ 棨 «“ª∑NæC∫œ ’´@∆Ω≈_£¨ À¸µƒÀÆπ˚ ’´@Ω‚õQ∑Ω∞∏ΩY∫œ¡Àæ´¥_∂¯∫Ü(ji®£n)ÜŒµƒôC∆˜»Àøÿ÷∆£¨øÏÀŸ∂¯ú ¥_µƒàDœÒÃé¿Ì“‘º∞œ»þM(j®¨n)µƒÀ„∑®£¨”√”⁄ÃÙþx∫ÕÖ^∑÷ø…”√Æa(ch®£n)∆∑“‘º∞ Ðìp£¨ªº≤°∫ÕŒ¥≥… ϵƒÀÆπ˚°£ ’∏ÓôC∫лð“◊∏ƒ—b£¨ “‘≤…’™≤ªÕ¨Óê(l®®i)–Õµƒ–¬ırÀÆπ˚£¨èƒ∂¯ π∆‰‘⁄∂ýÇÄ(g®®) ’∏Óºæπù∂ºƒÐþM(j®¨n)––å¶≤ªÕ¨ÀÆπ˚µƒ≤…’™°£À¸å¢ º»ƒÐåç(sh®™)¨Få¢≤…’™œµΩyƒ£âKªØµƒ—bðd‘⁄Þr”√Õœ¿≠ôC…œ£¨”÷ƒÐ∞¥’’“™«Û∂®÷∆◊‘–– Ω ’´@∆Ω≈_°£ ΩYòã…œ FF ôC∆˜»À≤…’™∆Ω≈_ø…þM(j®¨n)––ƒ£âKªØ¥ÓΩ®£¨åç(sh®™)¨FÎpœÚ°¢∂ý唺âÕ¨ïr(sh®™)≤…’™£¨»ÁàD 1-1b À˘ 棨þ@“≤ «À¸∏þ–ßµƒ‘≠“Ú÷Æ“ª°£FF ôC∆˜»Àµƒƒ©∂À≤…’™ôC–µ ÷‘⁄≤…’™ÃO(p®™ng)π˚ïr(sh®™)≤…”√µƒ «»˝÷∏ ◊¶ ΩΩYò㣨»ÁàD 1-1c,Õ®þ^(gu®∞)àDœÒ∑÷Œˆ∂®Œª◊•»°µΩ∫œ∏Òπ˚åç(sh®™)∫Û◊¶ ΩΩYòãï˛(hu®¨ )◊ˆðSœÚÞDÑ”(d®∞ng)å¢ÃO(p®™ng)π˚ ’™œ¬°£’™œ¬µƒπ˚åç(sh®™)ï˛(hu®¨ )—ÿ÷¯(zh®¥)±æ唵ƒÇ˜ÀÕôCòãǘÀÕµΩ–˝ÞD ’ºØœ‰÷–[6].
°°°°2°¢”…√¿á¯ Abundant Robotics …˙Æa(ch®£n)µƒ Abundant ≤…’™ôC∆˜»À∆Ω≈_£¨»ÁàD 1-2a À˘ 棨≈c FF ≤…’™ôC∆˜»À“ªò”埔⁄ “Õ‚π˚à@–ÕÀÆπ˚≤…’™ôC∆˜»À°£≈c FF ≤ªÕ¨µƒ «£¨Abundant ôC∆˜»À÷ª ìÌ”–“ªΩMƒ©∂À≤…’™∆˜–µ£¨ƒ©∂Àµƒ≤…’™‘≠¿Ì «≥¨’Êø’Œ¸πУ¨»ÁàD 1-2b À˘ 棨”…àDœÒ∑÷Œˆœµ ΩyþM(j®¨n)––∏þÀŸ≈ƒ’’∑÷Œˆøÿ÷∆å¶ú þm∫œ≤…’™µƒπ˚åç(sh®™)£¨π˚åç(sh®™)±ªŒ¸»Î’Êø’πеΩþ_ǘÀÕœµΩy£¨‘Ÿ”…ǘ ÀÕœµΩyþM(j®¨n)––∑÷—b°£Abundant ≤…’™ôC∆˜»ÀµƒÉû(y®≠u)Ñð‘⁄”⁄À¸µƒ≤…’™ÀŸ∂»∑«≥£øÏ£¨Îm»ª÷ª”–“ªÃ◊≤…’™œµΩy£¨µ´ «”…”⁄À¸µƒîµì˛∑÷ŒˆƒÐ¡¶º∞≤…’™œµΩyµƒþ\Ñ”(d®∞ng)ÀŸ∂»ð^øÏ£¨ø…þ_ 1 ÇÄ(g®®)/√Σ¨þ@ πµ√ Abundant ≤…’™ôC∆˜»Àµƒ≤…’™–߬ ◊„“‘≈c FF ôC∆˜»Àœý±»°£2019 ƒÍ 10 ‘¬√¿á¯ Abundant Robotics π´Àæ≈c“‘…´¡– FFRobotics π´ÀææÕþ@É…øÓôC∆˜»À≤…’™ºº–g(sh®¥)∫Õ–‘ƒÐ‘⁄√¿á¯»A ¢ÓDµƒπ˚ à@÷–þM(j®¨n)––¡À∏ÇŸê∫Õ‘uπ¿[7].
°°°°3°¢√¿á¯ RooT AI π´Àæ—–∞l(f®°)µƒ Virgo «“ªøÓ–°–Õúÿ “∑¨«—≤…’™ôC∆˜»À£¨»ÁàD 1-3a À˘ 棨 À¸ï˛(hu®¨ )‘⁄∑N÷≤––É»––þM(j®¨n)þ^(gu®∞)≥Ã÷–¿˚”√∏þ«Â»˝æSœýôCå¶∑N÷≤ø’ÈgþM(j®¨n)––íþ√Ë£¨ôzúy≥ˆ≥… Ï«“ÕÍ∫√µƒ ∑¨«—π˚åç(sh®™)þM(j®¨n)––≤…’™°£¥ÀôC∆˜»Àüo(w®≤)–Ë≈c…œºâîµì˛Ãé¿Ì÷––ƒœýþB£¨æþlj™ö¡¢≤…’™ƒÐ¡¶£¨ø…◊‘–– ÕÍ≥…îµì˛µƒ≤…ºØ°¢∑÷Œˆ°¢Ãé¿Ìº∞≤…’™π§◊˜°£À¸≤…”√µƒ «ë“±€ Ω‘O”㣨»˝◊‘”…∂»ôC–µ±€þBΩ” ‘⁄÷˘–Õ…˝ΩµôCòã…œø……œœ¬“∆Ñ”(d®∞ng)°£≤…’™ôC–µ ÷ûÈ»˝÷∏◊¶ ΩôCò㣨»ÁàD 1-3b À˘ 棨èó–‘÷∏ÍP(gu®°n) πùƒ©∂ÀπÃ∂®‘⁄ôC–µ ÷∏˘≤ø£¨÷∏ÍP(gu®°n)πù±ª÷–—Îö‚Ñ”(d®∞ng)Õ∆óUµƒ ’æo≠h(hu®¢n)ÚåÑ”(d®∞ng)£¨‘⁄≤…’™ïr(sh®™)÷–—Îö‚Ñ”(d®∞ng)Õ∆óU ï˛(hu®¨ )œÚ÷ÆÈg∑ΩœÚ“∆Ñ”(d®∞ng)£¨”…”⁄ ’æo≠h(hu®¢n)µƒ÷±èΩ–°”⁄ ÷÷∏À…≥⁄ÝÓëB(t®§i)µƒá˙¿@÷±èΩ£¨÷∏ÍP(gu®°n)πùï˛(hu®¨ )ÎSÕ∆óUµƒ «∞“∆∂¯ ’æo£¨èƒ∂¯äAæo∑¨«—π˚åç(sh®™)£¨»ÁàD 1-3c À˘ æ[8].
°°°°4°¢“‘…´¡– Metomotion π´Àæ—–∞l(f®°)µƒ GRoW ±ª∂®¡xûÈ"úÿ “ôC∆˜»Àπ§»À",GRoW ôC∆˜ »À¨FÎA∂Œµƒµ⁄“ªÇÄ(g®®)åç(sh®™)€`ÓI(l®´ng)”Ú «þxìÒ–‘◊‘Ñ”(d®∞ng) ’´@úÿ “∑¨«—°£GRoW µƒ∞l(f®°)’π∑ΩœÚ «ƒÐ±M¡ø∫Ü(ji®£n)ªØ ∏ƒ‘ϵƒ¨F”–µƒúÿ “≠h(hu®¢n)æ≥£¨◊å GRoW œµΩyƒÐ»ð“◊µƒºØ≥…µΩ¨F”–µƒúÿ “ª˘µA‘O ©…œ°£GRoW ƒÐÕÍ≥…úÿ “∑N÷≤µƒ∂ýÌó»ŒÑ’(w®¥)£¨∞¸¿® ’´@π˚ þ°¢–ÞºÙ÷¶»~°¢±Oøÿ ⁄∑€µ»°£ΩYòã…œ GRoW « ◊‘–– Ω÷––Õ≤…’™∆Ω≈_£¨»ÁàD 1-4a À˘ 棨¡˘◊‘”…∂»ôC–µ±€‘⁄ÈT(m®¶n)–Õ∆Ω≈_…œ∂Àø…◊‘”…“∆Ñ”(d®∞ng)£¨ôC –µ±€…œµƒƒ©∂ÀàÖ–∆˜ûÈø…“‘È_(k®°i)∫œµƒ¡‚–ŒôC–µ ÷°£≤…’™ïr(sh®™)Õ®þ^(gu®∞)∆Ω≈_…œµƒ 3D “ï”X(ju®¶)œµΩyå¶≥… Ï ∑¨«—þM(j®¨n)––∂®Œª£¨ôC–µ±€øø“ï”X(ju®¶)œµΩy“éÑù∫√µƒ¬∑æÄ(xi®§n)å¢ôC–µ ÷“∆Ñ”(d®∞ng)÷¡∑¨«—¥Æœ¬∑Ω£¨»ÁàD 1-4b À˘ 棨÷Æ∫ÛôC–µ±€øÿ÷∆¡‚–Œ—b÷√å¢∑¨«—¥ÆÕÍ»´Ã◊»Î£¨»ÁàD 1-4c À˘ 棨¥Àïr(sh®™)”√¡‚–Œ—b÷√«∞ ∂Àµƒ∑÷Îxµ¿æþå¢∑¨«—¥ÆΩ€π£∑÷Îx£¨»ÁàD 1-4d À˘ 棨‘⁄∑÷ÎxΩ€π£µƒÕ¨ïr(sh®™)≤…’™∆˜«∞∂Àï˛(hu®¨ )äAæo ∑¨«—¥Æ£¨»ÁàD 1-4e À˘ 棨≤…’™√ø¥Æ∑¨«—µƒ”√ïr(sh®™)‘⁄ 10s ◊Û”“[9].
°°°°5°¢”¢á¯µƒ Boaz Arad ≈c∆‰Õ¨ ¬π≤Õ¨È_(k®°i)∞l(f®°)¡À Sweeper ÃΩ∑ ’´@ôC∆˜»À[11],»ÁàD 1-5a À˘ æ°£‘ìôC∆˜»ÀœµΩy∞¸∫¨“ªÇÄ(g®®)¡˘◊‘”…∂»π§òI(y®®)±€£¨‘ìôC–µ±€≈cå£(zhu®°n)ÈT(m®¶n)‘O”㵃ƒ©∂ÀàÖ–∆˜œýþB£¨ RGB©\D îzœÒÓ^£¨»ÁàD 1-5b À˘ 棨≈cæþljàD–ŒÃé¿ÌÜŒ‘™µƒ∏þ∂À”ãÀ„ôC£¨ø…æé≥Ãþâðãøÿ÷∆∆˜£¨ ∆‰À˚Îä◊”‘Olj“‘º∞ɶ¥Ê»ð∆˜°£À˘”–‘Oljæ˘∞≤—b‘⁄◊‘––÷«ƒÐ∆Ω≈_…œ£¨‘ì∆Ω≈_ø…‘⁄Ð⵿ªÚµÿ√Ê …œ◊‘Ñ”(d®∞ng)––ÒÇ°£ôC∆˜»À‘⁄≤…’™ÃΩ∑ïr(sh®™)£¨≤…’™ôC–µ ÷‘⁄ôC–µ±€µƒøÿ÷∆œ¬∞¥’’«˙√Ê Z –ÕÐâ€E”…œ¬ ÷¡…œå¶ÃΩ∑÷≤÷ÍþM(j®¨n)–– 3D îz”∞£¨‘⁄àD–ŒÃé¿ÌÜŒ‘™–Œ≥…»˝æS∏þ«Â”∞œÒ£¨»ÁàD 1-5c À˘ 棨àDœÒ Ãé¿ÌÜŒ‘™µƒ∏þ∂À”ãÀ„ôCœÚø…æé≥Ãøÿ÷∆∆˜ðî≥ˆôC–µ ÷µƒ≤…’™øÿ÷∆÷∏¡Ó£¨◊Ó∫Û≤…’™ôC–µ ÷å¶Ã Ω∑þM(j®¨n)––≤…’™£¨Sweeper ‘⁄ ’´@ÃΩ∑ïr(sh®™)µƒ∆Ωæ˘ÀŸ∂»ÉHûÈ 24 s.ƒ©∂À≤…’™ôC–µ ÷≤ø∑÷£¨‘⁄µΩþ_◊Óº—≤…’™Œª÷√ïr(sh®™)”…ôC–µ ÷…œ∑Ωµƒ∂®Œª∆˜µ÷◊°ÃΩ∑≈c÷˜∏…µƒ V –ŒþBΩ”Ã飨»ÁàD 1-5d À˘ 棨 ‘ŸÕ®þ^(gu®∞)∂®∂Àµƒ’Ñ”(d®∞ng)µ∂∆¨å¢Ω€π£≈c÷˜∏…þBΩ”Ãé∑÷Îx£¨»ÁàD 1-5e À˘ æ°£
°°°°1.2.2 á¯É»—–æø¨FÝÓ
°°°°1°¢÷–á¯ÞròI(y®®)¥ÛåW(xu®¶)π§åW(xu®¶)‘∫‘O”㵃úÿ “¸Sπœ≤…’™ôC∆˜»À[81],»ÁàD 1-6a À˘ 棨 «“ª∑N◊‘–– ¬ƒéß ΩôC∆˜»À£¨¬ƒéßÚåÑ”(d®∞ng)ôCòã…œ∑Ω—blj”–ÎpƒøœµΩy°¢≤…’™øÿ÷∆œ‰°¢ƒ©∂ÀàÖ–∆˜°¢≤…’™ôC–µ ±€∫Õ¸Sπœπ˚ª@°£œ¬∑Ω¬ƒéß“∆Ñ”(d®∞ng)∆Ω≈_≤ªµ´”–¡º∫√µƒÕ®þ^(gu®∞)–‘ï˛(hu®¨ )þÄï˛(hu®¨ )∏˘ì˛åß∫ΩîzœÒôCµƒàDœÒ‘O∂® ◊Óº—µƒ––þM(j®¨n)¬∑æÄ(xi®§n)£¨“ï”X(ju®¶)œµΩy≤…”√Îpîz‘O”㺔¥Û¡Àå¶≠h(hu®¢n)æ≥«Èõrµƒ≤…ºØƒÐ¡¶£¨÷–—Îøÿ÷∆∆˜Õ®þ^(gu®∞) “ï”X(ju®¶)îµì˛∑÷ŒˆÃé¿ÌàDœÒîµì˛£¨÷–—Îøÿ÷∆∆˜∏˘ì˛àDœÒ–≈œ¢å¶’™»°ƒøòÀþM(j®¨n)––»˝æS∂®Œª£¨∂®Œªîµ ì˛∞l(f®°)ÀÕΩoôC–µ±€øÿ÷∆∆˜£¨øÿ÷∆∆˜ûÈ≤…’™ôC–µ ÷‘O”ã¡À≤…’™¬∑èΩ£¨◊Ó∫Û”…»·–‘ôC–µ ÷嶸SπœþM(j®¨n)––≤…’™°£ƒ©∂À≤…’™àÖ–∆˜”……œ∂ÀµƒΩ€π£∑÷ÎxôCòã∫Õœ¬∑Ωµƒª®πœäAæo—b÷√ΩM≥…£¨»ÁàD 1-6b À˘ æ£¨Ω€π£∑÷ÎxôCòãø…“‘∏˘ì˛π˚åç(sh®™)µƒ–ŒÝÓ≤ªÕ¨£¨◊‘Ñ”(d®∞ng)’{πù÷ÿ–ƒŒª÷√≈cΩ€π£Œª÷√µƒæýÎx°£äA æo—b÷√ «Îp÷∏ΩYò㣨≤…”√µƒÐõÛw ÷÷∏ƒÐâÚ∏˘ì˛¸Sπœ≤ªÕ¨–ŒÝÓ◊‘Ñ”(d®∞ng)∏ƒ◊ÉäAæoµƒ¡¶∂»∫ÕäAæoŒª ÷√£¨Õ®þ^(gu®∞)“ï”X(ju®¶)≤∂◊ΩœµΩyƒÐâÚ◊‘Ñ”(d®∞ng)äAæo¸Sπœ÷ÿ–ƒŒª÷√£¨ π≤…’™þ^(gu®∞)≥Ã∏¸º”∑Ä∂®°£
°°°°2°¢”…÷ÿëc¿Ìπ§¥ÛåW(xu®¶)—–æø…˙∏∂À¥—–∞l(f®°)µƒ∏ÃÈŸ≤…’™ôC∆˜»À[12],»ÁàD 1-7 À˘ 棨ƒ©∂ÀàÖ–∆˜ «“ª∑N·òå¶∏ÃÈŸ≤…’™µƒôC–µ ÷°£ôC–µ ÷≤…À˘¥Óðdµƒ∆Ω≈_ «”…±±æ©Â€≤©÷«ƒÐø∆ºº”–œÞπ´Àæ…˙ Æa(ch®£n)µƒ OUR-i5 –ÕôC–µ±€°¢¬ƒéß Ω◊‘÷˜“∆Ñ”(d®∞ng)∆Ω≈_°¢ÎpƒøîzœÒôC°¢…œŒªôC°¢Ô@ æ∆˜°¢ðî»Î‘Olj°¢ ôC–µ±€øÿ÷∆œ‰º∞π˚ª@ΩM≥…£¨»ÁàD 1-8 À˘ æ°£¥ÀôC–µ ÷ûÈ„Q ΩΩYò㣨ôC–µ ÷É…Ç»”–ö‚â∫Õ∆¡¶ óU◊˜ûÈÑ”(d®∞ng)¡¶£¨≤…’™ïr(sh®™)ö‚â∫Õ∆óUÕ∆Ñ”(d®∞ng)þBóU£¨þBóUôCòã π„Q ΩôCòãÈ]∫œå¢∏ÃÈŸΩ€π£∑÷Îx°£
°°°°3°¢»AƒœÞròI(y®®)¥ÛåW(xu®¶)èà±˛≥¨À˘—–∞l(f®°)µƒ∑¨ƒæπœ≤…’™ƒ©∂ÀàÖ–∆˜[13],≤…”√µƒ «»˝÷∏◊¶ ΩΩYò㣨 »ÁàD 1-9a À˘ æ°£¥À≤…’™ôC–µ ÷÷˜“™”…ÎäôC°¢æÌæÄ(xi®§n)Õ≤°¢µ◊◊˘°¢ ÷÷∏∫Õ‰ìΩz¿KΩM≥…£¨»ÁàD 1-9b À˘ æ°£ÆîôC–µ ÷µΩþ_≤…’™Œª÷√ïr(sh®™)£¨ÎäôCéßÑ”(d®∞ng)æÌæÄ(xi®§n)Õ≤–˝ÞD£¨å¢ºö‰ìΩz¿p¿@‘⁄æÌæÄ(xi®§n)Õ≤…œ£¨ºö‰ì Ωz¡Ì“ª∂À≈côC–µ ÷÷∏œýþB£¨ ÷÷∏ÎSºö‰ìΩz¿K—ÿÕ‚ö§…œµƒåßœÚ≤€œÚÉ»úy“∆Ñ”(d®∞ng)£¨å¢∑¨ƒæπœäAæo°£ ôCò㵃™öÃÿ÷ÆÃé‘⁄”⁄√ø∏˘ôC–µ ÷÷∏∂º «øø?j®¨)…∏˘þBΩ”‘⁄æÌæÄ(xi®§n)Õ≤É…∂Àµƒºö‰ìΩz¿KÅÌ(l®¢i)åç(sh®™)¨F ’æo ≈c·å∑≈µƒ£¨»ÁàD 1-9c À˘ æ°£ÆîôC–µ ÷ ’æo ÷÷∏ïr(sh®™)“ª∏˘‰ìΩz¿Kï˛(hu®¨ )—ÿÞDÑ”(d®∞ng)∑ΩœÚ ’æo£¨¡Ì“ª∏˘ ‰ìΩz¿KÑtï˛(hu®¨ )∑¥œÚ·å∑≈£¨ πôC–µ ÷÷∏—ÿÕ‚ö§åßœÚ≤€œÚÉ»“∆Ñ”(d®∞ng)£ªÆîôC–µ ÷–Ë“™·å∑≈ ÷÷∏ïr(sh®™)ÎäôC ∑¥ÞD£¨ πÉ…∏˘‰ìΩz¿K∑¥œÚ¿p¿@£¨ôC–µ ÷÷∏¥Àïr(sh®™)増ÿÕ‚ö§åßœÚ≤€œÚÕ‚Ç»“∆Ñ”(d®∞ng)°£
°°°°4°¢Àƒ¥®ÞròI(y®®)¥ÛåW(xu®¶)åOü®ÚE—–∞l(f®°)µƒ÷«ƒÐúÿ “∑¨«—≤…’™œµΩyƒ©∂ÀàÖ–ôCòã[14], «“ª∑N«∑Úå Ñ”(d®∞ng) Ω≤…’™ôC–µ ÷£¨»ÁàD 1-10a À˘ æ°£‘ìôC–µ ÷µƒÑ”(d®∞ng)¡¶ÅÌ(l®¢i)‘¥”⁄œ¬∑ΩµƒÀ≈∑˛≤ΩþM(j®¨n)ÎäôC£¨‘⁄≤…’™ ∑¨«—ïr(sh®™)£¨À≈∑˛≤ΩþM(j®¨n)ÎäôCÚåÑ”(d®∞ng)Ωz∏ÐÞDÑ”(d®∞ng)£¨»ÁàD 1-10b À˘ 棨Ωz∏Ð…œµƒª¨âKœÚœ¬þ\Ñ”(d®∞ng)£¨ª¨âKéß Ñ”(d®∞ng)þBóU πôC–µ ÷÷∏œÚÉ» ’æo£¨∑¨«—”|≈ˆµΩôC–µ ÷÷∏…œµƒ˝Xólâ∫¡¶þBóUïr(sh®™)£¨˝Xólï˛(hu®¨ )œÚôC–µ ÷ ÷∏É»þ\Ñ”(d®∞ng)£¨»ÁàD 1-10c À˘ 棨˝XólÕ®þ^(gu®∞)˝XðÜ π÷∏º‚ÍP(gu®°n)πùÞDÑ”(d®∞ng)£¨÷∏º‚ÍP(gu®°n)πùœÚÉ»èù«˙ ,‘⁄äA æo∑¨«—∫ÛÕ®þ^(gu®∞)÷∏º‚…œµƒâ∫¡¶Ç˜∏–∆˜ï˛(hu®¨ )å¢â∫∏––≈ÃñǘðîΩo…œŒªôC£¨…œŒªôC≈–îý∑¨«—À˘ Ðâ∫¡¶£¨ µΩþ_ÓA∂®÷µïr(sh®™)÷∏ÍP(gu®°n)πùÕ£÷π ’æo°£Æî·å∑≈∑¨«—ïr(sh®™)À≈∑˛ÎäôC∑¥œÚÞDÑ”(d®∞ng)£¨ ÷÷∏èàÈ_(k®°i)£¨ôC–µ±€¥Àïr(sh®™) å¢ôC–µ ÷œÚœ¬µπ÷√£¨÷∏º‚ Ð∑¨«—÷ÿ¡¶◊˜”√èàÈ_(k®°i)£¨˝XðÜéßÑ”(d®∞ng)˝XólöwŒª°£¥À‘O”㵃Éû(y®≠u)¸c(di®£n) «÷ª”– “ªÇÄ(g®®)À≈∑˛≤ΩþM(j®¨n)ÎäôC◊˜ûÈôC–µ ÷Ñ”(d®∞ng)¡¶‘¥£¨ΩµµÕ¡ÀôC–µ ÷’˚Ûwµƒ÷ÿ¡ø£¨úpðp¡ÀôC–µ±€â∫¡¶°£»± ¸c(di®£n) «ôC–µ ÷÷∏µƒΩYò㬑Ô@èÕÎs£¨‘⁄◊˜òI(y®®)ïr(sh®™)»ð“◊∞l(f®°)…˙π ’œ£ª≤¢«“ôC–µ ÷÷∏º‚øø∑¨«—◊‘…Ì÷ÿ¡¶ øÿ÷∆£¨å¶ôC–µ ÷º”≥÷π˚åç(sh®™)µƒΩ«∂»”–“ª∂®“™«Û£¨èƒ∂¯œÞ÷∆¡À≤…’™ïr(sh®™)’˚ÛwôCò㵃þ\Ñ”(d®∞ng)°£
°°°°5°¢á¯º“ÞròI(y®®)÷«ƒÐ—bljπ§≥úº–g(sh®¥)—–æø÷––ƒµƒÕıï‘È™µ»»À—–∞l(f®°)µƒ∑¨«—≤…’™ôC∆˜»À[15],»Á àD 1-11a À˘ 棨 «æC∫œ≤…’™∆Ω≈_°£¥ÀôC∆˜»ÀºØ≥…¡À≤…’™ ÷◊¶°¢ôC–µ±€°¢“ï”X(ju®¶)œµΩy°¢øÿ÷∆∆˜°¢ “∆Ñ”(d®∞ng)∆Ω≈_°¢…˝Ωµ≈_°¢π˚åç(sh®™)ª@°£ôC∆˜»À‘⁄åç(sh®™) ©≤…’™◊˜òI(y®®)ïr(sh®™)ôC∆˜»Àï˛(hu®¨ )ܢє(d®∞ng)“ï”X(ju®¶)œµΩy£¨å¶÷Ð?ch®•)˙µ?≠h(hu®¢n)æ≥þM(j®¨n)––”^(gu®°n)úy£¨Æî∞l(f®°)¨F≥… Ïπ˚åç(sh®™)ïr(sh®™)ï˛(hu®¨ )ܢє(d®∞ng)º§π‚∂®Œª—b÷√å¶π˚åç(sh®™)÷Ð?ch®•)˙þM(j®¨n)––íþ√Ë°£Ãé¿Ì∆˜ï˛(hu®¨ )å¢ íþ√˵ƒΩYπ˚ÖRøÇìQÀ„≥…ø’Èg»˝æS◊¯òÀ£¨Ãé¿Ì∆˜å¢◊¯òÀº∞ôC–µ±€þ\Ñ”(d®∞ng)µƒÐâ€E–≈œ¢“ªÕ¨Ç˜ÀÕ÷¡ ôC–µ±€ÚåÑ”(d®∞ng)—b÷√£¨ÚåÑ”(d®∞ng)—b÷√ÚåÑ”(d®∞ng)ôC–µ±€ «≤…’™ôC–µ ÷µΩþ_÷∆∂®≤…’™Œª÷√£¨å¶≥… Ï∑¨«—þM(j®¨n)––≤…’™°£≤…’™ôC–µ ÷ûÈÃ◊Õ≤–Õ—b÷√£¨»ÁàD 1-11b À˘ 棨≤…’™ïr(sh®™)ôC–µ±€å¢Ã◊Õ≤≤…’™—b÷√å¶ú ¥˝≤… ∑¨«—£¨’Êø’—b÷√‘⁄Ã◊Õ≤÷–Æa(ch®£n)…˙ÿìâ∫£¨∑¨«—±ªŒ¸»ÎÃ◊Õ≤£¨¥Àïr(sh®™)Ã◊Õ≤É»≤øµƒö‚ƒ“≥‰ö‚≈Ú√õäA≥÷ ∑¨«—£¨–˝îQÎäôCÈ_(k®°i) º–˝ÞDÕ®þ^(gu®∞)∫Û∑Ω˝XðÜ πÃ◊Õ≤ÞDÑ”(d®∞ng)£¨å¢∑¨«—Ω€π£≈§îý£¨≤…œ¬∑¨«—°£
°°°°øÇΩY£∫
°°°°£®1£©œ»þM(j®¨n)µƒπ˚ þ≤…’™ôC–µ¥Û∂ý∂ºûÈ◊‘––“∆Ñ”(d®∞ng)∆Ω≈_£¨π‚åW(xu®¶)ǘ∏–∆˜°¢÷«ƒÐÃé¿Ì∆˜°¢øÿ÷∆ ∆˜°¢≤…’™ ÷±€∂º¥Ó‘O‘⁄“∆Ñ”(d®∞ng)∆Ω≈_…œ°£
°°°°£®2£©≤…’™ƒ©∂ÀàÖ–∆˜¥Û∂ý∞≤—b‘⁄∂ý◊‘”…∂»ôC–µ±€…œ£¨”…ôC–µ±€å¢≤…’™ôC–µ ÷“∆Ñ”(d®∞ng)÷¡ ≤…’™Œª÷√þM(j®¨n)––≤…’™◊˜òI(y®®)°£
°°°°£®3£©≤…’™ôC–µ ÷∞¥å¶π˚åç(sh®™)µƒ ©¡¶∑Ω Ωø…∑÷ûÈå¶π˚åç(sh®™) © ©¡¶þM(j®¨n)––≤…’™∫Õå¶Ω€π£ ©¡¶þM(j®¨n) ––≤…’™°£
°°°°£®4£©å¶π˚åç(sh®™)µƒ∂®Œª∑Ω Ω¥Û∂ýûÈàDœÒ≤…ºØ∑÷Œˆ°¢3D íþ√Ë∑÷Œˆ°£
°°°°£®5£©≤…’™ôC–µ ÷µƒÚåÑ”(d®∞ng)—b÷√∞¸¿®ÎäôCÚåÑ”(d®∞ng)°¢“∫â∫ÚåÑ”(d®∞ng)°¢ö‚â∫ÚåÑ”(d®∞ng)»˝∑N–Œ Ω°£ ‘⁄÷«ƒÐÞr◊˜ŒÔ≤…’™∑Ω√Ê£¨Œ“᯵ƒÞròI(y®®)—–æøÎm»ªœý嶔⁄∞l(f®°)þ_᯺“∆≤Ωð^ÕÌ£¨µ´∞l(f®°)’πÀŸ∂» ∫ÐøÏ£¨≤ª…Ÿ‘∫–£°¢—–æøÀ˘∂º‘⁄å¶≤…’™ÓI(l®´ng)”ÚþM(j®¨n)––≤ªîýÃΩÀ˜£¨≤¢´@µ√¡À∫Ð¥Ûµƒ≥…øÉ(j®¨)°£∫Õá¯Õ‚µƒ œ»þM(j®¨n)ºº–g(sh®¥)œý±»£¨»‘¥Ê‘⁄∫Ð¥Ûµƒ≤Óæý£¨ÃÿÑeåç(sh®™)‘⁄ôC–µ ÷µƒÏ`ªÓ∂»∫Õ∑¥ë™ƒÐ¡¶∑Ω√Ê£¨≤¢«““ª–© ‘⁄á¯Õ‚∫Ð∂ýµÿ∑Ω∂º“—åç(sh®™)¨F÷«ƒÐ≤…’™ôC–µµƒ…ÃòI(y®®)ªØ£¨∂¯Œ“ᯑS∂ý—–æø?j®¨)H‘⁄‘áÚûÎA∂Œ°£µΩƒø«∞ûÈ÷π£¨Œ“á¯≤…’™ôC∆˜»ÀÓI(l®´ng)”ÚþÄ «»±∑¶≥… ϵƒ…ÃòI(y®®)ªØÆa(ch®£n)∆∑£¨∫Ð∂ý—–æø’˝‘⁄‘áþ\––∫Õò”ôC‘áÚû ÎA∂Œ°£
°°°°ƒø«∞ þπ˚≤…’™∆˜¥Ê‘⁄µƒ»±¸c(di®£n)÷˜“™”–»Áœ¬Àƒ¸c(di®£n)£∫
°°°°£®1£©¨F‘⁄µƒ≤…’™∆˜÷ª «·òå¶ÜŒ“ªµƒ þπ˚þM(j®¨n)––≤…’™£¨»±∑¶≤…’™∆’º∞–‘°£
°°°°£®2£©π˚ þµƒ◊RÑe∂»≤ªè䣨±ÊÑe≥ˆÀÆπ˚µƒ «∑Òþm“À≤…’™£¨‘Ï≥…≤ª±ÿ“™µƒ¿ÀŸM°£≤¢«“å¶ π˚ þµƒ∂®Œª≤ªÃ´ú ¥_°£
°°°°£®3£©π˚ þµƒ÷¶»~»ð“◊’⁄ìıπ˚åç(sh®™)£¨≤…’™ïr(sh®™)–Ë“™‘⁄÷≤ŒÔµƒÉ»≤øþM(j®¨n)––◊RÑe°£
°°°°£®4£©–Ë“™Ã·∏þôC–µµƒ‘O”ã»·–‘∫ÕÏ`«…–‘£¨ƒÐâÚ±ÐÈ_(k®°i)’œµK£¨º”øÏ≤…’™µƒÀŸ∂»£¨±£◊C≤… ’™µƒŸ|(zh®¨)¡ø£¨úp…Ÿå¶π˚åç(sh®™)µƒ∆∆⃰£
°°°°£®5£©åç(sh®™)¨Fπ˚åç(sh®™)≈cΩ€π£∑÷Îxµƒ∑Ω Ω÷˜“™”–ºÙ«–∫Õ¿≠◊ß°£”√ºÙ«–∑Ω ΩþM(j®¨n)––◊‘Ñ”(d®∞ng)ªØ≤…’™£¨ ï˛(hu®¨ )‘ˆº”å¶π˚åç(sh®™)µƒÇ˚∫¶é◊¬ £¨Õ¨ïr(sh®™)ºÙ«–π§æþ±ÿÌö∂„±ÐŒ¥≥… Ïπ˚åç(sh®™)º∞∆‰À˚÷¶»~£¨ï˛(hu®¨ ) π≤…’™—b÷√ µƒ‘O”ã∏¸º”èÕÎs£¨π …·óâºÙ«–∑÷Îx∑Ω Ω∂¯≤…”√¿≠◊ß Ω∑÷Îx∑Ω Ω°£
°°°°1.2.3 ∞l(f®°)’π∑ΩœÚ
°°°°ÎS÷¯(zh®¥)ø∆ººµƒ≤ªîý∞l(f®°)’π£¨ÞròI(y®®)ºº–g(sh®¥)“≤墔≠ÅÌ(l®¢i)∏¸∂ýµƒºº–g(sh®¥)∏Ô–¬°£∆‰÷˜“™µƒ∞l(f®°)’πƒøµƒ‘⁄”⁄Ω‚ ∑≈∏¸∂ýÑ⁄Ñ”(d®∞ng)¡¶°¢Ã·∏þ…˙Æa(ch®£n)–߬ °¢îU¥ÛΩõ(j®©ng)ù˙–ß“Ê°¢±£◊o≠h(hu®¢n)æ≥°¢úp…ŸƒÐ‘¥œ˚∫ƒµ»∑Ω√Ê°£Œ¥ÅÌ(l®¢i)å¶ úÿ “≤…’™ôC∆˜»Àµƒ—–æø÷ÿ¸c(di®£n)‘⁄“‘œ¬é◊ÇÄ(g®®)∑Ω√Ê[16].
°°°°£®1£©œÚ÷«ƒÐªØ∞l(f®°)’π°£úÿ “≤…’™ôC∆˜»À–Ë“™œÚ÷¯(zh®¥)∏¸º”÷«ƒÐªØµƒ∑ΩœÚ∞l(f®°)’π£¨ΩY∫œ AR µ» œ»þM(j®¨n)ºº–g(sh®¥)∞l(f®°)’π÷«ƒÐ“ªÛwªØ£¨ΩY∫œ◊˜ŒÔ…˙ÈL(ch®¢ng)∆⁄µƒ∂ýÇÄ(g®®)≠h(hu®¢n)πù£¨≈c∆‰À˚÷≤±£ôC∆˜»Àµ»–Œ≥…”––ßµƒ π§◊˜ºØ∫œÛw°£ΩY∫œ∂ý∑Nǘ∏–∆˜£¨ π’˚ÇÄ(g®®)∑N÷≤þ^(gu®∞)≥ÖŒ≥…È]≠h(hu®¢n)œµΩy°£
°°°°£®2£©œÚπ¶ƒÐ»´√ʪØ∞l(f®°)’π°£π˚ þµƒ≤…’™ôCòãï˛(hu®¨ )≈c∑N÷≤ôCòã°¢÷≤±£ôCòã…ı÷¡∞¸—bþ\ðîôC òãºØ∫œûÈΩy“ª’˚Ûw£¨åç(sh®™)¨Fπ˚ þ∑N÷≤ôC∆˜»Àµƒ»´π¶ƒÐªØ°£Œ¥ÅÌ(l®¢i)ÞròI(y®®)å¢Ω‚∑≈≥ˆ∏¸∂ýµƒ…˙Æa(ch®£n)¡¶£¨ «∂ý”ýÑ⁄Ñ”(d®∞ng)¡¶ÞD“∆÷¡…œå”õQ≤þºâ°£
°°°°£®3£©œÚŒÔ¬ì(li®¢n)æW(w®£ng)ªØ∞l(f®°)’π°£≤…’™ôC∆˜»À墔⁄∆‰À˚÷«ƒÐœµΩyÕ®þ^(gu®∞)æW(w®£ng)Ωj(lu®∞ )òã≥…“ªÇÄ(g®®)÷«ÞròI(y®®)ÞròI(y®®) ÷«ƒÐªØæW(w®£ng)Ωj(lu®∞ )°£åç(sh®™)¨F÷«ƒÐôC∆˜»À‘⁄∏˜ÇÄ(g®®)ÞròI(y®®)…˙Æa(ch®£n)≠h(hu®¢n)πù…œµƒüo(w®≤)øpå¶Ω”£¨Ã·∏þ…˙Æa(ch®£n)–߬ µƒÕ¨ïr(sh®™)◊Ó ¥ÛªØµƒ±£◊C¡Àπ˚ þµƒ–¬ır≥Ã∂»°£
°°°°1.3 —–æøµƒ÷˜“™É»»ð≈cºº–g(sh®¥)¬∑æÄ(xi®§n)
°°°°1.3.1 —–æøµƒ÷˜“™É»»ð
°°°°∏˘ì˛∑¨«—µƒ…˙ÈL(ch®¢ng)Ãÿ–‘º∞≤…’™Ãÿ¸c(di®£n)£¨≤…”√ TRIZ ¿Ì’ìå¶∑¨«—≤…’™ôCòãþM(j®¨n)––∫œ¿Ì‘O”㣨÷ ∏þ∑¨«—≤…’™–߬ µƒÕ¨ïr(sh®™)å¶∑¨«—π˚åç(sh®™)µƒìpÇ˚ΩµµΩ◊ÓµÕ£¨æþÛw—–æø?j®¨)»»ð»Áœ¬£?/p>
°°°°£®1£©∑¨«—»~±˙ƒ©∂À≈cΩ€π£÷ÆÈg…˙ÈL(ch®¢ng)πù¸c(di®£n)µƒ◊Ó¥Ûøπ¿≠èä∂»‘áÚû—–æø°£ ·òå¶Ãé”⁄∞Î Ï∆⁄µƒ∑¨«—£¨—–æøþx»°π˚åç(sh®™)Ÿ|(zh®¨)¡ø°¢≤…’™Ω«∂»°¢≤…’™ÀŸ∂»◊˜ûÈ”∞Ìë“ÚÀÿ£¨þM(j®¨n) ––∑¨«—»~±˙ƒ©∂À≈cΩ€π£÷ÆÈg…˙ÈL(ch®¢ng)πù¸c(di®£n)µƒ◊Ó¥Ûøπ¿≠èä∂»‘áÚû—–æø£¨´@µ√πù¸c(di®£n)Ãé¿≠¡¶‘áÚûœýÍP(gu®°n) îµì˛°£‘⁄ÜŒ“ÚÀÿ‘áÚûµƒª˘µA…œ£¨þM(j®¨n)––»˝“ÚÀÿŒÂÀÆ∆ΩÌë뙫˙√Ê‘áÚû‘O”㣨µ√≥ˆ◊ÓÉû(y®≠u)µƒòOœÞÖ¢ îµ°£Õ®þ^(gu®∞)∑÷Œˆîµì˛µ√∑¨«—…˙ÈL(ch®¢ng)πù¸c(di®£n)Ã鵃◊Ó¥Ûøπ¿≠èä∂»∆Ωæ˘÷µ∫Õ◊Ó¥Û÷µ£¨◊˜ûÈ‘O”ã≤…’™ôC–µ ΩYòãïr(sh®™)µƒ“¿ì˛°£
°°°°£®2£©Õ®þ^(gu®∞) TRIZ ‘O”ã∑Ω∑®£¨Ã·≥ˆ∑¨«—≤…’™ôC–µ ÷µƒ‘O”ã∑Ω∞∏°£ ·òå¶∑¨«—µƒ∑NÓê(l®®i)°¢…˙ÈL(ch®¢ng)Ãÿ–‘°¢–ŒÝÓ≥þ¥Áº∞≤…’™Ãÿ¸c(di®£n)£¨“‘º∞≤…’™π˚åç(sh®™)µƒÑ”(d®∞ng)◊˜Ãÿ¸c(di®£n)£¨“‘ TRIZ ¿Ì’ì◊˜ûÈ‘O”ã“¿ì˛£¨∏˘ì˛∑¨«—≤…’™ôCòã≤…’™ïr(sh®™)µƒÉA–±Ω«∂»°¢≤…’™¡¶∂»°¢ÀŸ∂»µ»Ö¢îµ µ»Ã·≥ˆ≤…’™ôCòã‘≠¿Ìº∞ôC–µ ÷µƒΩYòã£¨Ω®¡¢≤…’™ôC–µ ÷µƒ»˝æS∑¬’ʃ£–Õ£¨þM(j®¨n)––ôCòã∑¬’Ê∑÷ Œˆ°£
°°°°£®3£©∑¨«—≤…’™ôC–µ ÷µƒ‘áÚû—–æø Õ®þ^(gu®∞)å¶∑¨«—≤…’™ƒ©∂ÀàÖ–∆˜◊˜òI(y®®)þ^(gu®∞)≥õƒ¿Ì’ì∑÷Œˆ∫ÕΩYòã∑÷Œˆ£¨ÕÍ≥…∆‰ƒ©∂ÀàÖ–∆˜°¢Îä Ñ”(d®∞ng)œµΩy∫Õøÿ÷∆œµΩy∑Ω∞∏‘O”㣨ò”ôCº”π§£¨å¢ƒ©∂ÀàÖ–∆˜ƒ£–Õåë(xi®ß)»ÎôC∆˜»À≤Ÿ◊˜œµΩy∆Ω≈_£¨¥Ó Ω®∆‰øÿ÷∆œµΩy£¨ÕÍ≥…∑¨«—≤…’™ƒ©∂ÀàÖ–∆˜≤…’™‘áÚû≈cΩYπ˚∑÷Œˆ°£
°°°°1.3.2 —–æøµƒºº–g(sh®¥)¬∑æÄ(xi®§n)
°°°°2 ∑¨«—Ãÿ’˜º∞≤…’™þ^(gu®∞)≥Ã∑÷Œˆ
°°°°2.1 ∑¨«—µƒ÷≤ŒÔåW(xu®¶)Ãÿ’˜
°°°°2.1.1 ∑¨«—÷≤ŒÔÃÿ’˜
°°°°2.1.2 ≤…’™∑¨«—∆∑∑NþxìÒ
°°°°2.2 ∑¨«—≤…’™µƒπ§Àá“™«Û
°°°°2.2.1 úÿ “∑¨«—∑N÷≤ÞrÀá“™«Û
°°°°2.2.2 »Àπ§≤…’™Ñ”(d®∞ng)◊˜Ãÿ’˜∑÷Œˆ
°°°°2.3 ∑¨«—¡¶åW(xu®¶)∑÷Œˆ
°°°°2.3.1 ∑¨«—π˚åç(sh®™)¡¶åW(xu®¶)Ãÿ’˜∑÷Œˆ
°°°°2.3.2 ∑¨«—ـ𣵃¡¶åW(xu®¶)–‘ƒÐ∑÷Œˆ
°°°°2.3.3 ∑¨«—≤…’™µƒ¡¶åW(xu®¶)∑÷Œˆ
°°°°2.4 ±æ’¬–°ΩY
°°°°3.1 ‘O”ã‘≠Ñt
°°°°3.2 ΩYòã–Œ Ω‘O”ã
°°°°3.2.1 ≤…’™∑Ω ΩþxìÒ
°°°°3.2.2 ≤…’™Ñ”(d®∞ng)◊˜òãÀº
°°°°3.2.3 ÚåÑ”(d®∞ng)∑Ω ΩþxìÒ
°°°°3.2.4 ǘє(d®∞ng)∑Ω ΩþxìÒ
°°°°3.2.5 ΩYòã◊‘”…∂»¥_∂®
°°°°3.2.6 π§◊˜ø’Èg¥_∂®
°°°°3.2.7 ¡„º˛º”π§∑Ω ΩþxìÒ
°°°°3.3 øÇÛwΩYòã‘O”ã
°°°°3.3.1 ∂®ŒªôCòã‘O”ã
°°°°3.3.2 ∑÷ÎxôCòã‘O”ã
°°°°3.3.3 ≥–ðdôCòã‘O”ã
°°°°3.4 øÿ÷∆œµΩy‘O”ã
°°°°3.5 ±æ’¬–°ΩY
°°°°µ⁄Àƒ’¬ ≤…’™ôC–µ ÷µƒÃìîMò”ôCΩ®¡¢≈c∑¬’Ê∑÷Œˆ
°°°°4.1 ÃìîMò”ôCΩ®¡¢
°°°°4.1.1 Ω®¡¢ÃìîMò”ôC
°°°°4.1.2 ≤…’™Ñ”(d®∞ng)◊˜‘O”ã
°°°°4.2 ”–œÞ‘™∑÷Œˆ
°°°°4.2.1 ÓA‘áÚû
°°°°4.2.2 ¡„º˛Ïo¡¶åW(xu®¶)∑÷Œˆ
°°°°4.3 ôC–µ ÷þ\Ñ”(d®∞ng)∑¬’Ê∑÷Œˆ
°°°°4.4 ±æ’¬–°ΩY
°°°°µ⁄ŒÂ’¬ ≤…’™ôC–µ ÷µƒ‘áÚû—–æø
°°°°5.1 ò”ôC‘á÷∆
°°°°5.1.1 ¡„º˛÷∆◊˜
°°°°5.1.2 ôC–µ ÷—b≈‰
°°°°5.1.3 æéåë(xi®ß)øÿ÷∆≥ÖÚ
°°°°5.2 ∑¨«—≤…’™ôC–µ ÷‘áÚû—–æø
°°°°5.2.1 ≤ƒ¡œ≈c‘Olj
°°°°5.2.2 ‘áÚû∑Ω∞∏‘O”ã
°°°°5.2.3 ≤…’™‘áÚû
°°°°5.2.4 œµΩy∏ƒþM(j®¨n)
°°°°5.2.5 ‘áÚûΩY’ì
°°°°5.4 ±æ’¬–°ΩY6 ΩY’ì≈c’πÕ˚
°°°°6.1 ΩY’ì
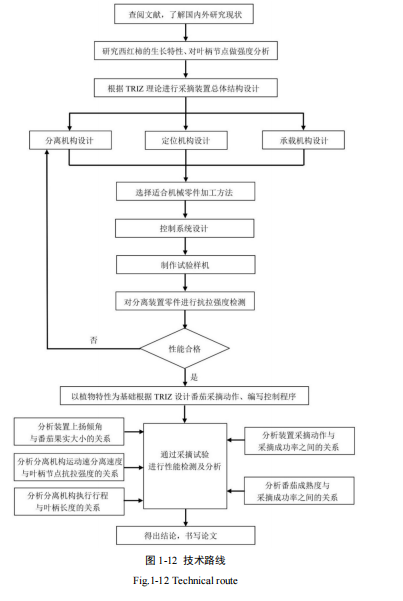
°°°°≤…’™ôC–µµƒƒ©∂ÀàÖ–∆˜◊˜ûÈπ˚ þ ’´@Óê(l®®i)ôC∆˜»Àµƒ÷ÿ“™ΩM≥…≤ø∑÷£¨÷±Ω””∞Ìë¡À’˚ÇÄ(g®®)ÛwΩy µƒàÖ––߬ £¨å¶≤…’™ôC–µ ÷µƒ‘O”ã « ’´@ôC∆˜»À—–∞l(f®°)µƒ÷ÿ“™≠h(hu®¢n)πù°£“Ú¥À±æ’쌃øÇΩY¡ÀÆî«∞ ≤…’™ôC–µ ÷‘⁄á¯É»Õ‚µƒ∞l(f®°)’π¨FÝÓ£¨“‘◊Ó¥ÛœÞ∂»µƒ±£◊o∑¨«—π˚åç(sh®™)≤ª ÐìpÇ˚ûÈ‘O”ãƒøòÀ£¨ Ð∑¨ «—µƒ÷≤ŒÔåW(xu®¶)Ãÿ’˜Ü¢∞l(f®°)£¨◊Ò—≠∑¨«—◊‘»ª…˙ÈL(ch®¢ng)∑±—Г鬅£¨“‘ TRIZ Ñì(chu®§ng )–¬‘O”ã¿Ì’ìûÈðo÷˙π§æþ£¨ ‘O”ã≥ˆ¡À“ª∑Nå¢◊˜”√¡¶ ©º””⁄∑¨«—Ω€π£…˙ÈL(ch®¢ng)πù¸c(di®£n)µƒ∑¨«—≤…’™ôC–µ ÷°£≤¢Õ®þ^(gu®∞)ƒ£îM∑¬’Ê°¢ò” ôC‘áÚûµ»∑Ω Ωå¶∑¨«—≤…’™ôC–µµƒ‘O”ã∫œ¿Ì–‘∫Õ≤…’™–߬ þM(j®¨n)––¡ÀÚû◊C°£Úû◊CΩYπ˚±Ì√˜£¨À˘‘O ”㵃∑¨«—≤…’™ôC–µ ÷þ_µΩ¡À‘O”㵃ÓA∆⁄ƒøòÀ°£ ‘⁄‘O”ã—–æøþ^(gu®∞)≥Ã÷–µ√≥ˆ“‘œ¬ΩY’ì£∫
°°°°£®1£©å¶á¯É»Õ‚÷«ƒÐ≤…’™œµΩyº∞∆‰ƒ©∂ÀàÖ–∆˜µƒ∞l(f®°)’π¨FÝÓþM(j®¨n)––¡ÀøÇΩY∫Õ∑÷Œˆ°£
°°°°£®2£©√˜¥_¡À≤…’™ôC–µ ÷À˘—–æøµƒ∑¨«—∆∑∑N£¨å¶∑¨«—÷≤ŒÔåW(xu®¶)Ãÿ’˜º∞¡¶åW(xu®¶)Ãÿ–‘µƒ∑÷Œˆ£¨µ√µΩ ¡À∑¨«—π˚åç(sh®™)µƒøπ‘≠èä∂»∫ÕΩ€π£øπ¿≠èä∂»µƒ÷ÿ“™Ö¢îµ°£å¶∑¨«—∑N÷≤∫Õ≤…’™þ^(gu®∞)≥ÃþM(j®¨n)––—–æø∫ÕøÇ ΩY£¨ µ√≥ˆ¡À≤…’™ïr(sh®™)”–ÍP(gu®°n)Ö¢îµ÷ÆÈgµƒÍP(gu®°n)œµ∫Õå¶≤…’™Îy“◊≥Ã∂»µƒ”∞Ìë°£
°°°°£®3£©Ã·≥ˆ¡À±æ‘O”ãÑì(chu®§ng )–¬–‘µƒ≤…’™∑Ω∞∏£¨“‘ TRIZ ¿Ì’ìûÈðo÷˙π§æþûÈôC–µΩYòã∫Õ≤…’™Ñ”(d®∞ng)◊˜µƒ ‘O”ã÷≥ˆ¡ÀΩ‚õQ∑Ω∞∏°£
°°°°£®4£©ÕÍ≥…¡À≤…’™ôC–µ ÷¡„º˛º∞ΩM∫œ∑Ω Ωµƒ‘O”㣨ûÈôC–µ ÷∑¨«—∂®Œª∫Õ∑÷ÎxôCòãþxìÒ¡ÀÑ”(d®∞ng) ¡¶ÚåÑ”(d®∞ng)º∞ǘє(d®∞ng)∑Ω Ω£¨≤¢ûÈøÿ÷∆œµΩyº∞π©Î䜵Ωy÷≥ˆ¡ÀΩ‚õQ∑Ω∞∏°£
°°°°£®5£©Õ®þ^(gu®∞)»˝æS‘O”ãÐõº˛ NX12.0 嶑O”㵃ôC–µ ÷þM(j®¨n)––¡ÀÃìîMΩ®ƒ££¨¿˚”√ NX µƒ∑¬’Êπ¶ƒÐå¶ ‘O”ã¡„º˛þM(j®¨n)––¡À”–œÞ‘™Ïo¡¶åW(xu®¶)∑÷Œˆ°£Õ®þ^(gu®∞)å¶ôC–µ ÷µƒ≤…’™þ^(gu®∞)≥ÃþM(j®¨n)––¡Àþ\Ñ”(d®∞ng)∑¬’Ê£¨≤…ºØ¡À≤… ’™þ^(gu®∞)≥Ã÷–ôC–µœµΩyÍP(gu®°n)ÊI¸c(di®£n)µƒþ\Ñ”(d®∞ng)Ðâ€E£¨å¶∆‰þ\Ñ”(d®∞ng)Ðâ€E°¢ÀŸ∂»º∞º”ÀŸ∂»‘∆àDþM(j®¨n)––¡À≤Ω‚∑÷Œˆ°£
°°°°£®6£©Õ®þ^(gu®∞) 3D ¥Ú”°µƒ∑Ω Ω嶑O”ã¡„º˛þM(j®¨n)––¡Àº”𧣨ÕÍ≥…¡À‘áÚûò”ôCµƒ¥ÓΩ®°£
°°°°£®7£©þxìÒ¡À”∞Ìë≤…’™Ñ”(d®∞ng)◊˜µƒÍP(gu®°n)ÊIÖ¢îµ◊˜ûÈ“ÚÀÿ≤¢÷∆∂®¡À‘áÚû∑Ω∞∏°£Õ®þ^(gu®∞)ÜŒ“ÚÀÿ‘áÚû’“µΩ ¡ÀÍP(gu®°n)ÊI֢ƒ◊Óº—‘O∂®÷µ≈côCòã∏ƒþM(j®¨n)∑Ω∞∏£¨ôC–µ ÷µƒ≤…’™ÉAΩ«θ‘O÷√ûÈ 44°«“å¶∑÷ÎxôCò㵃 øÿ÷∆Ö¢îµ T ‘O∂®ûÈ 350 ïr(sh®™)≤…’™≥…𶬠◊Ó∏þ°£å¶ôC–µ ÷þM(j®¨n)––∏ƒþM(j®¨n)∫Û‘Ÿ¥ŒþM(j®¨n)––¡À“‘≤…’™≥…𶬠◊˜ûÈ‘uÉr(ji®§)÷∏òÀµƒôzÚû–‘‘áÚû£¨±æ¥Œ‘áÚû≤…’™≥…𶬠þ_µΩ¡À 90%,‘áÚû◊C√˜ÕÍ≥…¡À÷∏þ≤…’™¬ ûÈ∏ƒþM(j®¨n)ƒøòÀ°£◊Ó∫ÛþM(j®¨n)––¡À‘áÚûÃÔµƒåç(sh®™)€`–‘≤…’™£¨‘áÚûΩYπ˚±Ì√˜ôC–µ ÷µƒÃÔÈg≤…’™≥…𶬠þ_µΩ¡À 75%,≤¢ûÈ≤…’™ôC–µœµΩyµƒþM(j®¨n)“ª≤Ω∏ƒþM(j®¨n)º∞∞l(f®°)’π÷≥ˆ¡À–¬µƒƒøòÀ°£
°°°°6.2 ’πÕ˚
°°°°±æŒƒ“‘∑¨«—µƒ÷≤ŒÔåW(xu®¶)Ãÿ’˜ûÈ“¿ì˛£¨Õ®þ^(gu®∞) TRIZ ¿Ì’ìΩ‚õQ¡À‘O”ã÷–≥ˆ¨FµƒÜñ(w®®n)Ó}£¨◊Ó∫ÛÕ® þ^(gu®∞)∑¬’ʃ£îM∫Õ≤…’™‘áÚûôzÚû≤¢∏ƒþM(j®¨n)¡À≤…’™ôC–µ ÷øÿ÷∆֢∞ôCòã‘O”ã°£‘⁄ÕÍ≥…≥ı≤ΩÚû◊C–‘°¢ ôzÚû–‘°¢åç(sh®™)€`–‘»˝¥Œ‘áÚû÷Æ∫Û◊C√˜¡À∏ƒ‘O”ã∫œ¿Ì”––ßµƒþ_µΩ¡À‘O”ãƒøòÀ£¨µ´“≤¥Ê‘⁄÷¯(zh®¥)≤ª◊„ ∫Õ∏ƒþM(j®¨n)µƒø’Èg£¨Ωõ(j®©ng)þ^(gu®∞)øÇΩYÀ˘‘O”㵃∑¨«—≤…’™ôC–µ ÷þÄ–Ë“™‘⁄“‘œ¬é◊∑Ω√Ê◊ˆþM(j®¨n)“ª≤Ωµƒ∏ƒþM(j®¨n)≈c —–æø£∫
°°°°£®1£©±æ‘O”ã «ª˘”⁄“ª÷––ÕÛw∑e∑¨«—þM(j®¨n)––µƒ‘O”ã≈c‘áÚû—–æø£¨≤…’™ôC–µ ÷å¶∆‰À˚∆∑∑N ∑¨«—µƒþmë™–‘þÄŒ¥◊ˆþM(j®¨n)“ª≤Ω‘áÚû’ì◊C°£
°°°°£®2£©≤…’™ôC–µ ÷…œµƒ∑¨«—ŒªôCòãþĥʑ⁄∏ƒþM(j®¨n)ø’Èg£¨∆‰∂®Œª„^µƒÀЖ‘◊É–ŒòOœÞð^µÕ π ∂®Œª„^‘⁄ÈL(ch®¢ng)ïr(sh®™)Èg π”√∫Û≥ˆ¨F≤ƒ¡œ∆£Ñ⁄¨FœÛ£¨üo(w®≤)∑®‘⁄…Ï≥ˆïr(sh®™)–Œ≥…≠h(hu®¢n)–ŒôCòã°£
°°°°£®3£©’™ôC–µ ÷åŸ≤…’™ôC–µ»ÀœµΩyµƒƒ©∂ÀàÖ–∆˜£¨¨FÎA∂ŒþÄŒ¥≈c…œŒª∂ý◊‘”…∂»ôC–µ±€ œÚþBΩ”°£‘⁄Ω”œ¬ÅÌ(l®¢i)µƒπ§◊˜÷–ï˛(hu®¨ )Ω®¡¢≈côC–µ±€º∞þ\Ñ”(d®∞ng)∆Ω≈_þBΩ”£¨‘O”ãôC–µ±€å¢ôC–µ ÷Õ∆ÀÕ÷¡ ≤…’™Œª÷√µƒÀ„∑®°£
°°°°£®4£©þxìÒæ´∂»ð^∏þµƒ“ï”X(ju®¶)≤∂◊ΩœµΩy£¨≤∂◊Ω∑¨«—µƒø’ÈgŒª÷√–≈œ¢£¨Ω®¡¢»˝æSø’Èg≤…’™ àD°£
°°°°£®5£© π∑¨«—≤…’™ôC∆˜»À≈cŒÔ¬ì(li®¢n)æW(w®£ng)œýþB£¨Ω°»´÷«ƒÐ∑N÷≤≤…’™œµΩy°£◊Ó∫Û–Œ≥…π˚ þƒÐ“≤ …˙Æa(ch®£n)µƒ’˚÷Ð∆⁄÷«ƒÐªØ£¨ π»ÀÇÉèƒ∑±ÎsµƒÞròI(y®®)Ñ⁄◊˜÷–Ω‚√ì≥ˆÅÌ(l®¢i)°£
÷¬ ÷x
°°°°ïr(sh®™)π‚Ôw ≈ÞD—€Èg»˝ƒÍæÕþ@ò”þ^(gu®∞)»•¡À£¨ªÿëõøº—–ïr(sh®™)π‚∑¬∑æÕ‘⁄◊ÚÃÏ£¨≤ªΩ˚∏–Ñ”(d®∞ng)°£»˝ƒÍÅÌ(l®¢i)£¨ ¿œéüÇɵƒΩÃ’d πŒ“å¶åW(xu®¶)–g(sh®¥)°¢å¶ø∆—–”–¡À…Óøõƒ’J◊R°£Œ“å¢ "¿ß÷™√„––°¢∑e∫Ò≥…∆˜"ïr(sh®™)øÃ„ë ”õ‘⁄–ƒ£¨œý–≈‘⁄Œ¥ÅÌ(l®¢i)µƒµ¿¬∑…œþ@å¢≥…ûÈŒ“≈˚«Gîÿº¨µƒ¿˚∆˜°£
°°°°∏–÷x∫⁄˝àΩ≠∞À“ªÞr⮥ÛåW(xu®¶)Ωo”ËŒ“þ@∂ŒåöŸFµƒ»À…˙Ωõ(j®©ng)öv£¨∏–÷xŒ“µƒåßéü∫˙ÐäΩà ⁄»˝ƒÍÅÌ(l®¢i) 嶌“µƒΩÃåß≈céÕ÷˙£¨∏–÷xåßéüÕıÂ˚¨|Ωà ⁄嶌“µƒπƒÑÓ≈c∂Ω¥Ÿ£¨Œ“墓‘?x®≤n)…Œªåßéü◊˜ûÈŒ“ΩÒ∫?«ÛåW(xu®¶)÷Ƭ∑…œµƒø¨ƒ££¨“≤∏–÷xŒ“µƒÕ¨åW(xu®¶)ÇÉ嶌“µƒ÷ß≥÷°£
°°°°Œ“Õ¨ò”“™∏–÷xƒ¨ƒ¨÷ß≥÷Œ“µƒº“»ÀÇÉ£¨∏–÷x∏∏ƒ∏∂ýƒÍÅÌ(l®¢i)嶌“µƒ≈ýB£¨∏–÷x∆ÞÉ∫嶌“µƒ¿Ì Ω‚≈c÷ß≥÷£¨ «ƒ„ÇÉΩo¡ÀŒ“«∞þM(j®¨n)µƒ”¬ö‚≈c–≈–ƒ°£
°°°°þÄ”õµ√‘⁄ljøº∆⁄Èg“ªŒª¿œéü‘¯’f(shu®≠)þ^(gu®∞)"øº—–å¢ «»À…˙÷–◊ÓÎyÕ¸µƒ∆¥≤´Ωõ(j®©ng)öv",ªÿÓ^ø¥ÅÌ(l®¢i) ¡ÓŒ“∏¸ÎyÕ¸µƒ «¥Ûº“Ωo”ËŒ“µƒ‘S∂ý£¨þ@–©ï˛(hu®¨ )“ª÷±∞ÈÎS÷¯(zh®¥)Œ“£¨Ωo”ËŒ“üo(w®≤)±M¡¶¡ø°£
£®»Áƒ˙–Ë“™≤Èø¥±æ∆™ÆÖòI(y®®)‘O”ã»´Œƒ£¨’àƒ˙¬ì(li®¢n)œµøÕ∑˛À˜»°£©