24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
公路的養護、升級、擴建施工等施工區域需布設圍護警示裝置,以警示和保護行人及駕駛員,保護生產(chǎn)作業(yè)現場(chǎng)。常用圍護警示裝置可采用路錐的形式,路錐已能實(shí)現設備的自動(dòng)布放,但路錐的阻隔性差,人員可以隨意進(jìn)出施工現場(chǎng);也可采用水馬、鐵馬、彩鋼圍欄等形式,但這類(lèi)設施的布設費時(shí)費力、不易回收。
論文結合課題合作企業(yè)的技術(shù)需求,提出一種新型的可拆裝式圍欄,并開(kāi)展可拆裝式圍欄自動(dòng)拾放機的設計及關(guān)鍵技術(shù)的研究。論文的主要研究?jì)热萑缦拢?/p>
1. 深入分析現有圍護警示裝置及自動(dòng)布放機構的優(yōu)缺點(diǎn),結合現代路橋養護規范,提出一種新型的可拆裝式圍欄形式。新型圍欄主要由圍欄布、圍欄桿、圍欄座及裝配機構等組成,可以快速的裝拆,適用于城市等需快速施工的場(chǎng)合。
2. 結合可拆裝式圍欄的拆裝工藝流程的分析,研發(fā)了一種新型圍欄自動(dòng)拾放機的總體設計方案。新型圍欄拾放機主要由圍欄提升部件、圍欄桿拆裝轉送部件、圍欄座解碼垛部件、圍欄桿倉儲部件、圍欄座倉儲部件等組成,可快速地安裝在施工車(chē)上,實(shí)現施工現場(chǎng)可拆裝式圍欄的快速布放與回收。
3. 基于風(fēng)場(chǎng)流體分析理論,建立了可拆裝式圍欄的風(fēng)場(chǎng)受力模型、圍欄的傾覆力學(xué)模型與滑移力學(xué)模型;采用流體力學(xué)分析軟件 CFX,優(yōu)化了可拆式圍欄的結構尺寸與圍欄座結構。
4. 采用圖解法與機構分析理論,完成圍欄座解碼部件、圍欄座垛層提升機構、圍欄座垛層定位機構等典型機構的優(yōu)化設計。結合 Solidworks 建模與 Ansys Workbench 的有限元分析,實(shí)現圍欄拆裝轉送機械手的優(yōu)化與結構輕量化設計。
關(guān)鍵詞: 可拆裝式圍欄;圍欄拾放機;圍欄座解碼垛;機械手;有限元分析
abstract
In the construction areas such as highway maintenance, upgrading and expansion, enclosure warning devices should be set to warn and protect pedestrians and drivers, and protect the production site. The common enclosure warning devices can be in the form of road cones, which can realize the automatic layout of equipment, but the barrier of road cones is poor, and personnel can enter and leave the construction site at will; water horse, iron horse, color steel fence and other forms can also be used, but the layout of such facilities is time-consuming, laborious and difficult to recover.
According to the technical requirements of the cooperative enterprises, this paper proposes a new type of removable fence, and carries out the design and key technology research of the removable fence automatic picking and placing machine. The main contents of this paper are as follows:
1. Based on the analysis of the advantages and disadvantages of the existing enclosure warning device and automatic placement mechanism, combined with the modern road and bridge maintenance specifications, a new type of removable fence is proposed. The new type of fence is mainly composed of fence cloth, fence pole, fence seat and assembly mechanism, which can be quickly assembled and disassembled, and is suitable for urban and other occasions requiring rapid construction.
2. Combined with the analysis of the disassembly process of removable fence, the overall design scheme of a new type of fence automatic picking and placing machine is developed. The new type of fence picking and placing machine is mainly composed of fence lifting parts, fence rod disassembly and transfer parts, fence base decoding stack parts, fence pole storage parts, fence base storage parts, etc., which can be quickly installed on the construction vehicle to realize the rapid placement and recycling of removable fences on the construction site.
3. Based on the theory of wind field fluid analysis, the wind field stress model, overturning mechanical model and sliding mechanical model of detachable fence are established; the structure size and fence base structure of detachable fence are optimized by using fluid dynamics analysis software CFX.
4. The graphic method and mechanism analysis theory are used to complete the optimization design of typical mechanisms, such as the decoding part of the fence base, the lifting mechanism of the stack layer of the fence base, and the positioning mechanism of the stacking layer of the fence base. Combined with Solidworks modeling and ANSYS Workbench finite element analysis, the optimization and lightweight design of fence disassembly and transfer manipulator are realized.
Key words: detachable fence; picker; decoder stack; manipulator; finite element analysis
目錄
1 緒論
1.1 課題背景與意義
本課題來(lái)源于課題組與北京路橋瑞通養護中心有限公司聯(lián)合開(kāi)展的橫向課題,根據北京路橋瑞通養護中心有限公司給出的具體技術(shù)要求,結合現代路橋養護規范,設計開(kāi)發(fā)一種能實(shí)現對施工現場(chǎng)進(jìn)行自動(dòng)圍護的公路圍欄自動(dòng)拾放機。
1.1.1 研究背景
高速公路是現代經(jīng)濟發(fā)展的必然產(chǎn)物,高速公路的建設不僅體現了一個(gè)國家的交通發(fā)達程度,也體現了經(jīng)濟發(fā)展的整體水平[1].高速公路建設作為我國經(jīng)濟建設的一項重要支撐設施,在國民經(jīng)濟發(fā)展中起著(zhù)舉足輕重的作用,自改革開(kāi)放以來(lái),我國公路建設用 20 年的時(shí)間走完了發(fā)達國家 40 年的才走完的進(jìn)程,總體上實(shí)現了持續、快速和有序發(fā)展[2].2018 年末,全國公路總里程達到 484.65 萬(wàn)公里,是 1949 年的 60 倍,高速公路總里程 14.3 萬(wàn)公里,總里程居世界第一位[3].我國更是創(chuàng )造性的完成青島海灣大橋、杭州灣大橋和珠港澳大橋等偉大的路橋工程。根據交通運輸行業(yè)發(fā)展統計公報的數據統計,如圖 1.1 所示,2018 年末年末全國公路總里程 484.65 萬(wàn)公里,比上年增加 7.31 萬(wàn)公里,公路密度 50.48 公里/百平方公里,增加 0.76 公里/百平方公里,公路養護里程475.78 萬(wàn)公里,占公路總里程 98.2%,伴隨著(zhù)公路里程數增加的同時(shí),我國機動(dòng)車(chē)數量也出現大幅增長(cháng)[4].

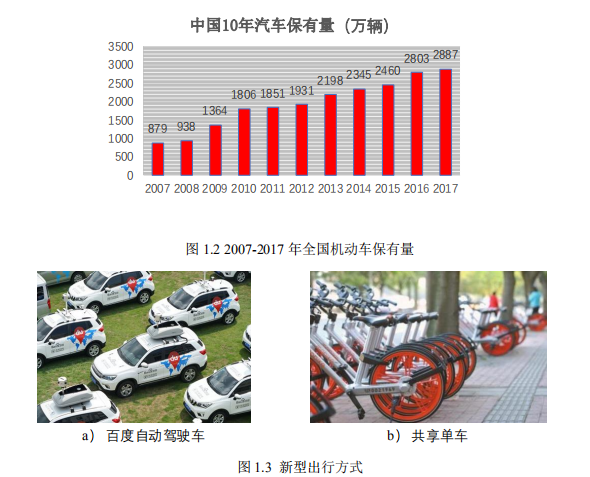
隨著(zhù)經(jīng)濟的快速發(fā)展,中國成為全球汽車(chē)量增長(cháng)最快的國家之一,如圖 1.2 所示,我國汽車(chē)保有量連續 10 年呈線(xiàn)性增長(cháng),截至 2018 年底,我國機動(dòng)車(chē)保有量更是達到3.27 億輛,如此大規模的機動(dòng)車(chē)隊伍,不僅給公路保暢養護帶來(lái)了巨大壓力,也直接導致了在養護或城市施工過(guò)程中二次交通事故率的增加[5].除此之外,隨著(zhù)科學(xué)技術(shù)的發(fā)展和出行方式的多樣化,如圖 1.3 所示自動(dòng)駕駛和共享單車(chē)等狀況已成為傳統的公路養護作業(yè)不能忽視的問(wèn)題,公路養護保暢的壓力變得越來(lái)越大。
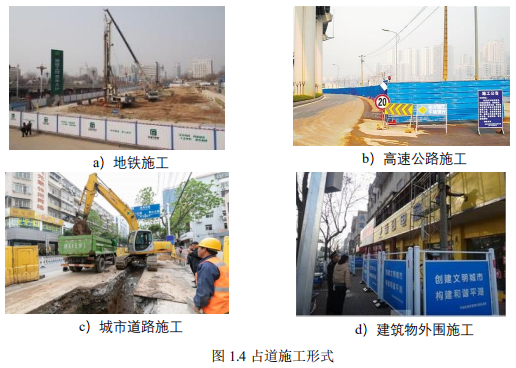
為了保證公路的建設質(zhì)量以及人們的安全有序出行,各有關(guān)部門(mén)和相關(guān)責任人越來(lái)越重視公路養護保暢問(wèn)題,尤其是公路養護作業(yè)區的安全狀況一直倍受社會(huì )各界的廣泛關(guān)注,公路養護施工作業(yè)區的安全保障策略成為公路運營(yíng)中亟待解決的一個(gè)問(wèn)題[6-7].較之與普通公路城市軌道交通工程建設和日常養護施工,城市中的占道施工對道路交通產(chǎn)生的負面影響更為嚴重,占道施工作業(yè)具有道路的施工通常要進(jìn)行封閉作業(yè)、施工人員眾多、施工時(shí)間緊張、占道面積大等的特點(diǎn)[8],常見(jiàn)的占道施工形式如圖 1.4 所示,占道施工時(shí),由于部分道路封閉,道路條件發(fā)生變化,車(chē)輛需要經(jīng)過(guò)合流、分流, 車(chē)速也需要在短時(shí)間內不斷地發(fā)生變化,車(chē)輛之間交通沖突增加,導致交通擁堵、交通事故等問(wèn)題的發(fā)生,施工安全隱患較大,因此在公路占道施工過(guò)程中,科學(xué)、安全和高效的道路養護管理及圍護技術(shù)就顯得十分必要[9].
1.2 城市占道施工特性的分析與研究
1.2.1 占道施工區分類(lèi)
占道施工是指需要占用道路的工程施工、道路養護、設施維修、交通管理、路政管理、環(huán)衛清潔以及綠化等活動(dòng)[10-11].
占道施工區是指為保障占道施工現場(chǎng)工作人員和設備、車(chē)輛、行人的交通安全而用交通安全設施圍起來(lái)的交通控制區域[12].
占道施工區分類(lèi):
(1) 依據占道情況,占道施工分為:完全占道施工和部分占道施工。
(2) 依據施工區所在位置,占道施工分為:路段上的、交叉口處的和特殊區域(橋梁、隧道等)的占道施工。
(3) 依據施工方式,占道施工分為:定點(diǎn)施工和移動(dòng)施工兩種形式。
依據占道時(shí)間,占道施工分為:長(cháng)期占道施工作業(yè)(一年及以上)、中期占道施工作業(yè)(三個(gè)月以上,六個(gè)月以?xún)龋⒍唐谡嫉朗┕ぷ鳂I(yè)(三個(gè)月以?xún)龋┖团R時(shí)占道施工作業(yè)。本論文中占道施工區主要是指城市道路上、臨時(shí)定點(diǎn)占道施工項目區域[13-15].
1.2.2 占道施工區交通事故的影響因素
結合國內外交通事故分析數據,通過(guò)分析可知造成占道施工區交通事故的主要因素有[16-29]:
(1)施工區域未設置相關(guān)的警示引導標志。在占道施工區域未設置、設置不全或者設置不規范交通標志,是導致交通事故的一大主要因素,在施工區域外設置交通警示標志可以使駕駛員提前反應,提高警惕以應對復雜的駕駛情況,避免駕駛員在高速行駛時(shí)來(lái)不及反應,而直接沖撞入施工作業(yè)區內,發(fā)生嚴重的交通事故;在夜間施工時(shí),由于光線(xiàn)不足,駕駛員可視距離縮短,施工區域應當設置具有反光特性或者安裝有警示燈的交通標志,以此來(lái)減少占道施工區域事故的發(fā)生。
(2)駕駛員違章駕駛。有關(guān)研究結果表明,交通事故中由人直接引發(fā)的約占 70%,其中由不良的駕駛習慣引起的占比又遠高于其他原因,疲勞駕駛、駕駛時(shí)與他人交談、接聽(tīng)電話(huà)和醉酒駕駛等不良駕駛習慣都會(huì )使駕駛員注意力分散,無(wú)法準確判斷路況,在占道施工區域由于路況復雜,不良的駕駛習慣往往直接成為交通事故誘因。
(3)速度差。美國的 Glennon 和 Joyner 曾深入分析了車(chē)速與事故率關(guān)系的影響。
在該研究成果基礎上形成了 1964 年由 Solomon 起草的報告,該報告提供了不同平均車(chē)速對應的事故數據,并得出結論:車(chē)輛之間的車(chē)速差值越大,車(chē)輛發(fā)生交通事故的可能性就越大。
從施工方的角度,根據以上造成事故因素,為減少施工作業(yè)區事故的發(fā)生率,應當在施工作業(yè)區設置正確顯眼的交通標志、必要的隔離設施和防撞設施,實(shí)施限速策略[18].
1.2.3 工作區圍護方式分類(lèi)
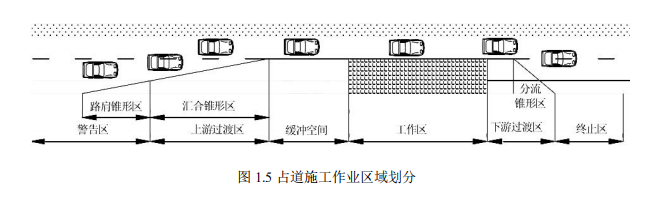
在占道施工時(shí)要封閉管制交通,考慮施工作業(yè)區及行車(chē)的安全,需要在施工現場(chǎng)外圍布放路障和交通警示標志,引導車(chē)輛行駛。作業(yè)區一般劃分為:警告區、過(guò)渡區、緩沖區、工作區和終止區,如圖 1.5 所示,工作區即施工作業(yè)區域,除了需要在警告區布置必要的施工警示外,在工作區布置渠化設施和路障是降低交通事故率最重要的手段,隨著(zhù)科技的進(jìn)步,在工作區外布放的渠化設施及路障的形式及種類(lèi)也一直在改變和豐富,以此來(lái)適應不同的施工環(huán)境[16].
(1)路錐
路錐是施工現場(chǎng)或道路上一種常見(jiàn)警示安全設施[30].如圖 1.6 所示,路錐有多種不同的形式,按形狀分方錐和圓錐,按材質(zhì)分為橡膠路錐和塑料路錐,路錐的顏色主要有紅,黃,藍三種,紅色主要用在室外交通、城市路口車(chē)道、室外停車(chē)場(chǎng)、人行道和建筑物之間的隔離警示,黃色主要用在室內的停車(chē)場(chǎng)等光線(xiàn)暗淡的地方,藍色主要用在一些特殊的場(chǎng)合,路錐外表面大多貼有高反光材料,讓警示更明顯。路錐具有良好的柔韌性、抗撞性能、抗汽車(chē)車(chē)輪沖擊的優(yōu)點(diǎn),即使車(chē)輛碾過(guò)也不會(huì )碎裂,此外客戶(hù)還可以根據要求進(jìn)行定制。由于路錐的制作材料多為塑料或橡膠,使其質(zhì)量輕、體積小,在車(chē)輛撞擊時(shí)幾乎沒(méi)有阻擋能力,路錐布放時(shí)有一定的間隔,若中間空隙大,人或車(chē)輛可以隨意穿梭,阻隔性十分差。

(2)水馬圍擋
如圖 1.7 所示,水馬圍擋是一種內部中空的體積較大的塑料殼體,其上開(kāi)有注水口,在使用時(shí)將水馬布放在工作區周?chē)纬伤R組,從注水口注入一定量的水,防止其在風(fēng)力或外力作用下發(fā)生傾覆,水馬的體積較大,能起到警示作用要強于路錐,水馬之間彼此沒(méi)有間隙,阻隔性較好,但由于其體積較大,在進(jìn)行運輸和安裝時(shí)會(huì )十分麻煩,外殼破損時(shí)會(huì )漏水,使得施工地面濕滑,造成意外事故。

(3)施工鐵馬
施工鐵馬又稱(chēng)為鐵馬、施工鐵護欄、施工護欄、市政鐵馬等如圖 1.8 所示,是經(jīng)無(wú)縫鐵管折彎,焊接,打磨拋光,高壓噴涂等一些列工藝制成,用于施工場(chǎng)所的隔離與警示,也可用作工廠(chǎng)、車(chē)間、倉庫、停車(chē)場(chǎng)、商業(yè)區、公共場(chǎng)所的安全防護。具有款式簡(jiǎn)單大方,移動(dòng)靈活,無(wú)需任何地面安裝就可使用,產(chǎn)品可以回收,無(wú)污染,警示效果好的特點(diǎn),此外側面具有掛鉤,鐵馬與鐵馬之間可以相互連接,使得受力,承受能力更強。
與水馬和路錐相比,鐵馬的阻攔能力更強,警示性介于路錐與水馬之間,但鐵馬也因此顯得格外笨重,在布放和回收時(shí)更費人力,只適用于需要長(cháng)久進(jìn)行阻隔的場(chǎng)所。

(4)彩鋼圍欄
彩鋼圍欄常見(jiàn)于長(cháng)期施工工地周邊,如地鐵修建、水暖管道鋪設、樓房施工等現場(chǎng),、如圖 1.9(a)所示的支架形式的彩鋼圍欄主要由彩鋼面板及支架組成,面板固定安裝在支架上,在安裝時(shí)需要在支架上安裝配重物,用來(lái)穩固圍欄,以防止圍欄發(fā)生傾覆,支架一般為三角形結構,故所需的安裝面積較大;如圖 1.9(b)所示的彩鋼圍欄的布設需要有地面安裝,一般都采取在地面挖掘坑洞,然后插入安裝立柱并澆筑混凝土或者用膨脹螺絲直接固定在地面的架設方式,安裝好立柱之后還需等混凝土凝結后再進(jìn)行彩鋼面板的安裝工作,彩鋼面板通過(guò)固定裝置安裝在兩個(gè)立柱之間,以上兩種彩鋼圍欄阻隔性與警示性是以上圍擋設施中最好的,但其缺點(diǎn)也非常明顯,由于其體積大、重量大、安裝工藝復雜,因此也是布放安裝最費時(shí)費力、占地面積最大、最不便于回收的圍擋形式。

1.3 施工路障自動(dòng)收放的系統國內外研究概況
1.3.1 施工路障自動(dòng)收放的系統國外研究概況
1.3.2 施工路障自動(dòng)收放的系統國內研究概況
1.4 論文主要研究?jì)热?/p>
2 圍欄拾放機的總體設計
2.1 可拆式圍欄
2.1.1 現有圍欄的局限性
2.1.2 占道施工區圍欄的工況分析
2.1.3 可拆式圍欄組成
2.1.4 可拆式圍欄的優(yōu)點(diǎn)
2.1.5 可拆式圍欄拆裝工藝
2.2 圍欄拾放機總體設計方案
2.2.1 圍欄拾放機的設計原則
2.2.2 圍欄拾放機設計的技術(shù)要求
2.2.3 圍欄拾放機總體組成
2.2.4 圍欄拾放工藝流程
2.3 圍欄拾放提升部件
2.3.1 圍欄拾放提升部件組成原理
2.4 圍欄桿倉儲系統
2.4.1 圍欄桿倉儲系統的組成原理
2.5.2 圍欄桿倉儲系統的工藝流程
2.6 圍欄底座倉儲系統
2.6.1 圍欄底座倉儲系統組成與工作原理
2.6.2 圍欄底座出入庫工藝流程
2.6.3 解碼垛工藝流程
2.7 本章小結
3 圍欄受風(fēng)流場(chǎng)仿真與圍欄座設計
3.1 圍欄受力分析與結構布局設計
3.1.1 重力載荷力矩
3.1.2 風(fēng)載荷力矩
3.1.3 不同孔徑圍布布局設計
3.2 流體仿真基本原理與仿真軟件
3.2.1 CFX 介紹
3.2.1 流體基本公式
3.3 流體域計算
3.4 圍擋流體仿真
3.4.1 邊界條件
3.4.2 仿真結果分析
3.5 圍擋支撐結構設計
3.5.1 底座受力分析
3.5.2 圍欄質(zhì)量校核
3.5.3 圍欄底座設計
3.6 本章小結
4 圍欄座垛型的解碼部件設計
4.1 圍欄座的垛型結構
4.2 圍欄座垛型的解碼方案選型
4.2.1 直角坐標機器人系統
4.2.2 碼垛機器人
4.3 圍欄座解碼部件的組成原理
4.3.1 圍欄座解碼部件的組成
4.3.2 圍欄座解碼部件工藝流程
4.4 圍欄座垛層提升裝置設計
4.4.1 圍欄座垛層提升裝置組成
4.4.2 圍欄座垛層提升裝置工作原理
4.4.3 提升裝置傳動(dòng)機構選型
4.5 圍欄座垛層定位機構設計
4.5.1 圍欄座垛層定位機構組成
4.5.2 圍欄座垛層定位機構工作原理
4.5.3 連桿設計
4.6 本章小結
5 拆裝轉送機械手有限元分析
5.1 有限元分析理論概述
5.1.1 有限元法分析原理
5.1.2 有限元分析流程
5.1.4 Ansys Workbench 軟件簡(jiǎn)介
5.2 拆裝轉送機械手有限元分析前處理
5.2.1 拆裝轉送機械手基本結構
5.2.2 機械手仿真模型簡(jiǎn)化
5.2.3 結構材料屬性設定
5.2.4 網(wǎng)格劃分
5.2.5 邊界條件設置
5.3 模態(tài)仿真結果分析
5.4 靜力學(xué)仿真結果分析
5.5 機械手輕量化設計
5.6 本章小結
結論
論文結合課題合作企業(yè)的技術(shù)需求,針對大城市道路施工僅能晚上施工、施工時(shí)間短、工作任務(wù)重的特點(diǎn),開(kāi)展可拆裝式圍欄及圍欄自動(dòng)拾放機設計及關(guān)鍵技術(shù)的研究,取得以下結論:
1. 結合現代路橋養護規范,研發(fā)了一種新型的可拆裝式圍欄,新型圍欄主要由圍欄布、圍欄桿、圍欄座及裝配機構等組成,可以快速的裝拆,適用于城市等需快速施工的場(chǎng)合。圍欄的高度為 1600mm,單節圍欄的長(cháng)度在 2500-3200mm 范圍可調。
2. 研發(fā)一種新型的可拆式圍欄自動(dòng)拾放機,新型圍欄拾放機主要由圍欄提升部件、圍欄桿拆裝轉送部件、圍欄座解碼垛部件、圍欄桿倉儲部件、圍欄座倉儲部件等組成,可快速地安裝在施工車(chē)上,實(shí)現施工現場(chǎng)可拆裝式圍欄的快速布放與回收。圍欄的自動(dòng)布放最大速度 45 個(gè)/分鐘,回收的最大速度為 28 個(gè)/分鐘。
3. 基于風(fēng)場(chǎng)流體理論和流體力學(xué)分析軟件 CFX 的分析,優(yōu)化了可拆式圍欄的結構尺寸與圍欄座結構,以開(kāi)孔占比面積的 50%為衡量條件,確定了圍欄布上 90mm 孔徑的開(kāi)孔方案。
4. 采用理論分析與 Ansys 有限元仿真分析,優(yōu)化了圍欄座解碼部件、圍欄座垛層提升機構、圍欄座垛層定位機構等典型機構,完成圍欄桿拆裝轉送機械手的優(yōu)化與結構輕量化設計。
論文目前已完成可拆式圍欄自動(dòng)拾放機的前期設計,后期課題要進(jìn)行關(guān)鍵部件的優(yōu)化設計與實(shí)驗研究,研發(fā)可拆式圍欄自動(dòng)拾放機樣機并推廣應用
參考文獻
[1] 趙叔庸,楊楓峰。高速公路對發(fā)展國民經(jīng)濟的戰略作用[J].中國公路學(xué)報,1993(04):52-59.
[2] 丁俊發(fā)。改革開(kāi)放 40 年中國物流業(yè)發(fā)展與展望[J].中國流通經(jīng)濟,2018,32(04):3-17.
[3] 本刊。2018 年交通運輸行業(yè)大數據(公路運輸部分)[J].商用汽車(chē),2019(04):85-87.
[4] 楚峰。 "數"看交通運輸的 2018"績(jì)"與"效"明顯提升[J]. 運輸經(jīng)理世界, 2019(02):76-79.
[5] 《中國公路學(xué)報》編輯部。中國汽車(chē)工程學(xué)術(shù)研究綜述·2017[J].中國公路學(xué)報,2017,30(06):1-197.
[6] Causes and Prevention Measures of Secondary Rear-End Accidents in the Rescue of HighwayTraffic Accidents[J] . Qing-yuan Yu. Procedia Engineering . 2013
[7] 林艾。 高速公路新建互通立交施工區交通組織設計優(yōu)化[D].東南大學(xué),2019.
[8] 張文會(huì )。 高速公路交通事故現場(chǎng)區劃安全測度研究[D].吉林大學(xué) 2010[9] 朱家正。 道路作業(yè)區交通事故傷亡程度影響因素分析模型研究[D].北京交通大學(xué),2016.
[10]Justin F. Jackson. Roads to American Empire: U.S. Military Public Works and CapitalistTransitions, 1898-1934.[J]. Journal of Historical Sociology,2020,33(1)。
[11]Xianyong Zhang,Shifeng Huang,Shenjun Yang,Renfang Tu,Lianghai Jin,Giuseppe D'Aniello.Safety Assessment in Road Construction Work System Based on Group AHP-PCA[J].Mathematical Problems in Engineering,2020,2020.
[12]張圣。 高速公路改擴建施工作業(yè)區夜間臨時(shí)交通安全設施設置研究[D].長(cháng)安大學(xué),2015.
[13]趙曉雷。 公路改擴建作業(yè)區交通安全分析與設施設置研究[D].哈爾濱工業(yè)大學(xué),2007.
[14]Jack Koci,Roy C. Sidle,Anne E. Kinsey-Henderson,Rebecca Bartley,Scott N. Wilkinson,Aaron A.
Hawdon,Ben Jarihani,Christian H. Roth,Luke Hogarth. Effect of reduced grazing pressure onsediment and nutrient yields in savanna rangeland streams draining to the Great Barrier Reef[J].
Journal of Hydrology,2020,582.
[15]蔡軍,孫義章,侯義龍。路錐擺放機結構設計[J].大連大學(xué)學(xué)報,2019,40(03):20-22.
[16]Lau Georgina,Gabbe Belinda J,Collie Alex,Ponsford Jennie,Ameratunga Shanthi,Cameron PeterA,Harrison James E,Giummarra Melita J. The Association Between Fault Attribution and WorkParticipation After Road Traffic Injury: A Registry-Based Observational Study.[J]. Journal ofoccupational rehabilitation,2019.
[17]楊惠敏,陳雨人,方守恩,袁建華。 高速公路交通事故救援時(shí)間與生存率關(guān)系模型研究[J].交通信息與安全。 2015(04)
[18]Pedro Cesar Lopes Gerum,Andrew Reed Benton,Melike Baykal-Gürsoy. Traffic density oncorridors subject to incidents: models for long-term congestion management[J]. EURO Journal onTransportation and Logistics,2019,8(3-4)。
[19]Fort E,Gadegbeku B,Gat E,Pelissier C,Hours M,Charbotel B. Working conditions and riskexposure of employees whose occupations require driving on public roads - Factorial analysis andclassification.[J]. Accident; analysis and prevention,2019,131.
[20]Gray Shannon E,Collie Alex. Work absence following road traffic crash in Victoria, Australia: Apopulation-based study.[J]. Injury,2019,50(7)。
[21]Olanrewaju A. Apampa. Environmental benefits of corn cob ash in lateritic soil cementstabilization for road works[J]. African Journal of Science, Technology, Innovation andDevelopment,2019,11(4)。
[22]楊京帥,孫正一,王江蘭,王文亮,陳希昌。 交通規則約束下的道路交通安全系統穩定性分析[J].中國公路學(xué)報。 2015(01)
[23]周義勇,顧文彪,陳凌。 基于高速公路路障自動(dòng)收放的控制系統[J].黑龍江交通科技。 2014(07)
[24]L S R Supriadi,B Wisesatama,Y Latief. Development of work breakdown structure (WBS)dictionary for road construction works[J]. IOP Conference Series: Earth and EnvironmentalScience,2018,195(1)。
[25]Livi Stefano,Theodorou Annalisa,Rullo Marika,Cinque Luigi,Alessandri Guido. The rocky road toprosocial behavior at work: The role of positivity and organizational socialization in preventinginterpersonal strain.[J]. PloS one,2018,13(3)。
[26]張志強。 城市占道施工對路段交通影響的研究[J]. 內蒙古公路與運輸, 2013(03):70-71.
[27]蔣家高 唐翀 朱權。 占道施工交通組織及保通管理規范對策研究--以昆明市為例[J]. 道路交通與安全, 2014(06):15-20.
[28]白皓 羅文軍。 高速公路養護作業(yè)區行車(chē)危險性分析與安全設計對策研究[J]. 交通標準化,2010(21):108-112.
[29]李穎峰。 基于占道施工條件下的交通分配及禁限管理的應用研究[J]. 中國優(yōu)秀碩士學(xué)位論文全文數據庫, 2017(07):87-87.
[30]黃珍,舒心,唐文龍,項焱華,李小偉。 路錐投收自動(dòng)控制系統的研制[J].交通信息與安全。 2017(02)
[31]張秀維。 交通路錐自動(dòng)收放系統的設計與研究[D].南京理工大學(xué) 2013
[32]郭凡良。 一種路錐自動(dòng)回收和擺放裝置[P].中國專(zhuān)利:CN206752351U,
[33]黃健民,馬銀忠,何小龍,蔣平,歐益寶,周子豪,張永勇,劉朋,石楊,張進(jìn)帥,金克,王任,鮑坤,辛史柱,孫君。 路錐自動(dòng)擺放與回收裝置[P].中國專(zhuān)利:CN106930205A,
[34]S.A. Velinsky,W.A. White. Automated machine for highway cone placement and retrieval[J] . Int.J. of Heavy Vehicle Systems . 2004 (2)
[35]LEE Y C,WHITE W A,VELINSKY S A. Integration and testing of a multistack automated conemachine 2004
[36]葉亞昌。 交通路錐收放箱機構設計與動(dòng)態(tài)特性研究[D].南京理工大學(xué) 2015[37]邱彬,平雪良,王昕煜,任武濤,袁野,宋炳鍾。 高速公路交通錐回收機器人設計[J].機電一體化。 2017(10)
[38]葉亞昌,張龍,林陽(yáng)。基于 ABAQUS 的路錐夾緊機構瞬態(tài)響應分析[J].機械制造與自動(dòng)化,2015,44(06):113-115.
[39]呂能超,李澤,黃珍,吳超仲。 高速公路事故現場(chǎng)隔離路錐布設車(chē)引導系統研究[J].交通信息與安全。 2017(03)[40]陳元瑗。 交通錐自動(dòng)拾放機設計與研究[D].長(cháng)安大學(xué),2013.
[41]孟慶愛(ài)。 某型路錐拾放機械手運動(dòng)控制設計與研究[D].南京理工大學(xué),2013.交通路錐整體收
[42]劉韶曼,陳紅奎,邵衛紅,胡春娟,武鑫奇,鄭婉,賈晨。 交通錐領(lǐng)域專(zhuān)利技術(shù)分析[J].河南科技。2016(12)
[43]崔龍飛,張龍,孟慶愛(ài)。 基于 MATLAB 的路錐拾放機器人運動(dòng)仿真研究[J].機械制造與自動(dòng)化。2014(01)
[44]楊立新,于淼,李玉善,呂安濤。 交通錐回收機械手擺動(dòng)控制研究與仿真[J].專(zhuān)用汽車(chē)。 2013(09)
[45]黃珍,項炎華,李澤,呂能超。路錐自動(dòng)投收機械手軌跡規劃及控制系統設計[J].中國工程機械學(xué)報,2017,15(04):283-290.
[46]盧云。 結構穩健綜合優(yōu)化設計方法研究及其在交通路錐收放車(chē)中的應用[D].南京理工大學(xué),2014.
[47]呂能超,李澤,羅齊漢,黃珍,吳超仲。 交通事故現場(chǎng)隔離路錐車(chē)的總體設計與研究[J].中國工程機械學(xué)報。 2016(03)
[48]王兆權,吳海彬,葉錦華,許金山。基于 Kalman 濾波的移動(dòng)機械臂動(dòng)態(tài)抓取研究[J].機電工程,2019,36(08):851-856.
[49]袁夢(mèng)。 機械結構設計準則[J]. 今日科苑, 2008(02):57-57.
[50]劉海鵬。 矩五拱折疊網(wǎng)架結構繞流風(fēng)速場(chǎng)計算技術(shù)及表面風(fēng)壓分析[D].西安建筑科技大學(xué),2017.
[51]張興華。 自動(dòng)三翻廣告牌流場(chǎng)及關(guān)鍵部件受力計算與分析[D].燕山大學(xué),2015.
[52]鄒曉旭。 空間桁架大型臨時(shí)看臺風(fēng)荷載分析方法[D].哈爾濱工業(yè)大學(xué),2014.
[53]廖建寶。 考慮流固耦合作用下超高層建筑的風(fēng)荷載數值模擬[D].重慶大學(xué),2013.
[54]李剛 周文寶。 直角坐標機器人簡(jiǎn)述及其應用介紹[J]. 伺服控制, 2008(09):76-79.
[55]Manh Dung Ngo,Nguyen Thanh Phuong,Vo Hoang Duy,Sang Bong Kim. Robust Control ofWelding Robot for Tracking a Rectangular Welding Line[J]. SAGE Publishing,2008,3(3)。
[56]李曉丹 鄧家軍 胡剛 張祥麗 龍立云。 面向倉儲物流的碼、拆垛直角坐標機器人系統設計[J]. 制造業(yè)自動(dòng)化, 2019(04):154-157.
[57]趙剛。 直角坐標式地磚鋪貼機的設計研究[J]. 機電技術(shù), 2015(6):2-2.
[58]Q. Liu. AUTOMATED LOGISTICS MANAGEMENT AND DISTRIBUTION BASED ON RFIDPOSITIONING TECHNOLOGY[J]. Begell House Inc.,2020,79(1)。
[59]Lukas Polten,Simon Emde. Scheduling automated guided vehicles in very narrow aislewarehouses[J]. Elsevier Ltd,2020.
[60]蔣蕊聰。 自動(dòng)化立體倉庫[J]. 中國儲運, 2007(09):56-57.
[61]高殿明 辛艷東。 基于 PLC 的立體倉庫控制系統的設計[J]. 應用能源技術(shù), 2012(01):49-52.
[62]Apex Supply Chain Technologies; Apex Self-Serve Automated Lockers Help Warehouse TeamsWork Faster and Smarter[J]. NewsRx,2020.
[63]Snowflake Inc.; Snowflake and Next Pathway Announce a Strategic Partnership to AutomateMigrations From Legacy Data Warehouses to Snowflake[J]. NewsRx,2019.
[64]譚筱。 物流技術(shù)的一個(gè)劃時(shí)代的革新 自動(dòng)化立體倉庫[J]. 市場(chǎng)周刊(新物流), 2008(05):32-33.
[65]閻家光。 電子產(chǎn)品硬件設計的探析[J]. 電子技術(shù)與軟件工程, 2015(20):137-137.
[66]晏祖根,李明,徐克非,孫小華,閆志鵬,孫智慧。高速機器人分揀系統機器視覺(jué)技術(shù)的研究[J].包裝與食品機械,2014,32(01):28-31.
[67] F. Basile,P. Chiacchio,E. Di Marino. An auction-based approach to control automated warehousesusing smart vehicles[J]. Elsevier Ltd,2019,90.
[68]Hiroyuki Yuba,Solvi Arnold,Kimitoshi Yamazaki. Unfolding of a rectangular cloth fromunarranged starting shapes by a Dual-Armed robot with a mechanism for managing recognitionerror and uncertainty[J]. Taylor & Francis,2017,31(10)
[69]郭金艷。 基于 SolidWorks 的直角坐標機器人系列化快速設計系統的研究與開(kāi)發(fā)[J]. 中國優(yōu)秀碩士學(xué)位論文全文數據庫, 2016(02):67-67.
[70]王炎歡 陳阿三 劉鑫茂。 直角坐標機器人控制系統的研制[J]. 輕工機械, 2010(04):74-76.
[71]Xiu Min Shi,Wei Jie Fei,San Peng Deng. The Research of Circular Interpolation Motion ControlBased on Rectangular Coordinate Robot[J]. Trans Tech Publications Ltd,2016,4283[72]周文寶。 百格拉直角坐標機器人在無(wú)損檢測行業(yè)的部分應用[J]. 伺服控制, 2008(10):73-75.
[73]Manh Dung Ngo,Vo Hoang Duy,Nguyen Thanh Phuong,Sang Bong Kim. Robust Control ofWelding Robot for Tracking a Rectangular Welding Line[J]. SAGE Publications,2006,3(3)。
[74]寧連旺。ANSYS 有限元分析理論與發(fā)展[J].山西科技,2008(04):65-66+68.
[75]朱建國。 龍門(mén)式真空吸附機械手的設計與主梁結構優(yōu)化[D].廣州大學(xué),2016.
[76]陳非琛。 龍門(mén)式機械手動(dòng)靜態(tài)特性分析及結構優(yōu)化[D].湖南大學(xué),2014.
[77]倪曉宇,易紅,湯文成,倪中華。機床床身結構的有限元分析與優(yōu)化 [J].制造技術(shù)與機床,2005(02):50-53.
致謝
逝者如斯,不舍晝夜,來(lái)哈求學(xué)已逾七載,期間務(wù)求對人、對事不敢有絲毫懈怠,怎奈才疏,難有建樹(shù),貴在能遇良師益友,聊以慰藉。
感謝導師晏祖根再造之恩。生其骨血、飼其五谷為父母恩,可使其立于天地,增強筋骨,而充盈其思想,增長(cháng)其見(jiàn)識技藝,為人鑄魂者是謂其再造。與恩師共度時(shí)日感悟良多,成事實(shí)難,貴在爭取,生活實(shí)苦,貴在樂(lè )觀(guān)。從師期間,諄諄教誨,以身立德,必時(shí)時(shí)感念,謹記教導,在以后生活中,立人必要穩重靠譜、立事須嚴謹盡職。
感謝董靜、趙麗麗老師。在繁復的研究生管理工作中,一絲不茍、兢兢業(yè)業(yè)為我們解決問(wèn)題,關(guān)懷我們的生活。
感謝一起陪我度過(guò)研究生三年求學(xué)生涯的師兄、師弟,在生活中一起玩樂(lè ),在學(xué)業(yè)上共同進(jìn)步,為這段時(shí)光增彩。
感謝審閱及答辯的各位專(zhuān)家教授,謝謝您們提出的寶貴建議,使這篇論文更加完善周祥。
感謝學(xué)校及輕工學(xué)院學(xué)院為我們提供良好的學(xué)習環(huán)境、完備的生活設施,使我能夠愉快順利的在商大度過(guò)我的七年大學(xué)求學(xué)之旅!
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)