24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要
在交通擁堵的城市快速找到最優(yōu)的泊車(chē)位是一個(gè)較難的問(wèn)題,而由泊車(chē)引起的事故也越來(lái)越多,因此,尋車(chē)位難和泊車(chē)難的問(wèn)題得到廣泛關(guān)注。本文針對這兩個(gè)問(wèn)題進(jìn)行深入研巧。主要研究?jì)热莞爬ㄈ缦?
(1)針對在起于飽和的停車(chē)場(chǎng)尋車(chē)位難的問(wèn)題,通過(guò)車(chē)載自組織網(wǎng)絡(luò )交換可用泊車(chē)位信息傳達給感興趣的司機。在泊車(chē)位和車(chē)輛相關(guān)的區域內有效傳播可用泊車(chē)位信息,一個(gè)適當的協(xié)議是必要的。此外,多個(gè)車(chē)輛對同一個(gè)車(chē)位感興趣將導致車(chē)輛之間的競爭。為了解決這個(gè)問(wèn)題,本文彈細介紹了車(chē)輛的預訂協(xié)議,通過(guò)車(chē)載自組織網(wǎng)絡(luò )有效地分配泊車(chē)位,并避免了車(chē)輛么間的競爭。
(2)針對低速平行泊車(chē)轉向工況,本文提出一種自動(dòng)泊車(chē)路徑規劃方法。路徑規劃方法由兩部分組成。首先,車(chē)輛的運動(dòng)學(xué)模型具有相應的幾何形狀,用來(lái)創(chuàng )建一個(gè)泊車(chē)路徑,并考慮當空間狹小時(shí),通過(guò)多次微調實(shí)現泊車(chē),此路徑由圓弧構成;其次,考慮曲率連續性采用回旋曲線(xiàn)設計路徑。并通過(guò)matl油仿真實(shí)驗驗證其有效性。
(3)將自抗擾控制(Active Disturbance Rejection Control,簡(jiǎn)稱(chēng) ADRC)方法應用到低速泊車(chē)路徑跟蹤中,提髙了車(chē)輛泊車(chē)精度側向控制問(wèn)題。考慮巧車(chē)速度變化、轉向機械部分運動(dòng)學(xué)模型不確定性及轉向系統延遲,建立基于A(yíng)DRC方法的路徑跟蹤控制器。利用實(shí)驗車(chē)進(jìn)行平行泊車(chē)系統實(shí)車(chē)測試,驗證了路徑跟蹤控制器的有效性。
關(guān)鍵詞:泊車(chē)位;車(chē)載自組織網(wǎng)絡(luò );自動(dòng)泊車(chē):自抗擾;
Abstract
Finding a parking space in the city of traffic cong的tion becomes extremely difficult and the number of accidents caused by parking fast increases. The difficulty of finding a parking space and parking have received more and more attention. For the two problems: this paper cani的 on the further research deeply. The main research contents are summarized as follows:
(1) We study the difficulty in finding parking spaces problem of saturated parking lot. By exchanging available parking information in a vehicular ad hoc network (VANET), drivers can receive interesting information while driving. A suitable protocol is nceded th dkseminate the available parking information efficiently within the are江 where they are relevant. Moreover, in such a competitive context where each vehicle may be interested in a resource, to solve this problem, we detail in this paper a reservation prothcol that efficiently allocates parking spaces in vehicular ad hoc networks and avoids the competieson among the vehicles.
2)Automatic parking path planning is put forward for parallel parking steering situation. The path-planning method consists of two parts. First, the kinematic model of the vehicle, with corresponding geometry, is used th create a path th park the vehicle in one or more maneuvers if the spot is very narrow. This path is conesituted of circle arcs. Second,this path is transformed into a continuous- curvature path using clothoid curves Using matlab simulatibn for thsts,the thSt Ksults verify the effectiveness.
(3) Active disturbance rejection control (ADRC) method is applied in path tracking fbr the first time, which can solve the precision lateral control problem when the vehicle is parking in a low speed. During parallel parking,the parking speed is affected by the external disturbance owing to the roughncM of road surface and road bumps,the model uncertainty is existed in steering kinematics for the complex steering mechanism, and there is a delay time in the steering system. In order to dimmish the impacts of external disturbance,model uncertainty and sthering system delay on path tracking, the path tracking controller based on ADRC method is built. Using the experimental vehicle for real vehicle thsts,the test results verify the effectiveness of the path tracking controller.
Key Words: parking space; VANET; aWomatic parking; ADRC;
隨著(zhù)社會(huì )進(jìn)步和經(jīng)濟的發(fā)展,汽車(chē)逐漸從一種運輸或代步工具轉變?yōu)槿藗兩詈凸ぷ髦械闹匾M成部分。伴隨著(zhù)人工智能的迅猛發(fā)展,汽車(chē)由人為的機械操作逐漸轉變?yōu)闄C械的智能化。汽車(chē)技術(shù)包含了多口學(xué)科,其中包括:自動(dòng)控制、人工智能、優(yōu)化理論、傳感器技術(shù)、信號處理、圖像處理、通信技術(shù)、信息融合等。隨著(zhù)人民生活條件的日益改善,人們對汽車(chē)性能的要求也在不斷提高,汽車(chē)消費者們要求車(chē)輛,不但要具備較高的操縱穩定性、良好的乘坐舒適性、可觀(guān)的燃油經(jīng)濟性,還要具有較高的駕駛安全性。人口數量的增加化及城市建筑設施的不斷擴増,使有限的城市空間變得擁擠不堪,汽車(chē)數量的逐年增加,不僅導致交通日趨擁堵,也使得在城市尋找一個(gè)巧車(chē)位變得困難,并且泊車(chē)空間也隨么減少。
由于城市汽車(chē)數量巨大,尋找一個(gè)泊車(chē)位不僅變得異常困難,同時(shí)也增加了交通擁擠。尋找泊車(chē)位是城市交通擁堵的基本姐成部分(在城市5%~10%交通擁堵是因為尋找泊車(chē)位造成的和在小街道交通擁堵則島達60%)。此外,由于汽車(chē)尾氣的排放,導致燃料消耗和環(huán)境污染。迅速的尋找到一個(gè)泊車(chē)位不僅可節省時(shí)間,而且可以節能減排。參考文獻凹分析了如何快速的尋找一個(gè)泊車(chē)位。同樣,從倫敦帝國學(xué)院(帝國學(xué)院的城市能源系統項目)的一項研究中了解到,在擁擠的城化花在尋找一個(gè)泊車(chē)位的消耗占總燃料的40%。據唐納德博的研究,在美國游戲軟件公司(商業(yè)區旁邊的加利福尼亞大學(xué),校園洛杉抓)捜索泊車(chē)位導致每年約47000加侖的汽油消耗、730噸的二氧化碳排放量和95000小時(shí)(十一年)的時(shí)間浪費。所以快速合理的分配一個(gè)泊車(chē)位,不僅能達到節能減排的目的,同時(shí)可以解決一部分交通擁堵問(wèn)題。
20世紀40年代學(xué)者們提出車(chē)輛輔助系統構想,而自動(dòng)泊車(chē)系統近些年引起了廣泛的關(guān)注。1950~1980年間主要對輔助巧車(chē)系統進(jìn)行研究該系統通過(guò)分析計算得出合適的方向盤(pán)轉角,并指導駕駛員轉向操作實(shí)現該轉角,因此,輔助泊車(chē)引導裝置是通過(guò)引導駕駛員轉向操作,輔助駕駛員完成泊車(chē)。
伴隨著(zhù)科學(xué)的進(jìn)步,圖像處理技術(shù)和機器視覺(jué)技術(shù)得到了飛速發(fā)展。由此誕生了基于倒車(chē)影像來(lái)輔助駕駛員泊車(chē)操作。該裝置通過(guò)在車(chē)后身安裝視覺(jué)傳感器,獲取泊車(chē)時(shí)盲區的環(huán)境信息,并以圖像的形式顯示給駕駛員,達到輔助泊車(chē)的目的。
倒車(chē)雷達系統是基于超聲波傳感器來(lái)感知周?chē)沫h(huán)境信息,達到輔助泊車(chē)的目的。與倒車(chē)影像系統相比共同點(diǎn)為:都是利用傳感器感知周?chē)h(huán)境信息,減少車(chē)輛的盲區;不同點(diǎn)為:倒車(chē)影像系統是基于圖像采集及視頻處理技術(shù),可以將盲區的信息以圖片的形式更加直觀(guān)的呈現給駕駛員,得到的環(huán)境信息全面,但光線(xiàn)強弱對視覺(jué)傳感器影響大。而倒車(chē)雷達系統的超聲波不受光線(xiàn)影響,但能采集到的環(huán)境信息有限。盡管倒車(chē)雷達系統和倒車(chē)影像系統都能有效地采集盲區環(huán)境信息輔助駕駛員完成泊車(chē),但是具體的巧車(chē)控制操作還需駕駛員自行完成,并不能減少泊車(chē)的操作強度,對于經(jīng)驗比較少的駕駛員完成泊車(chē)操作依然比較困難。
1988年,日本Suzuki公司首先在小型轎車(chē)Cervo上配備了 Koyo公司研發(fā)的轉向柱助力式電動(dòng)助力轉向系統,由此推動(dòng)了自動(dòng)泊車(chē)系統的研巧。隨著(zhù)電動(dòng)轉向系統技術(shù)逐漸成熟,自動(dòng)泊車(chē)系統也取得了飛速的發(fā)展。1992年,大眾在IRV以概念車(chē)上首次配備了自動(dòng)泊車(chē)裝置;2003年,豐田銳斯混合動(dòng)力車(chē)配備了自動(dòng)泊車(chē)裝置;2003年,雪鐵龍研發(fā)了 C3 City Park泊車(chē)系統;2005年,豐田推出APGS高級泊車(chē)引導系(Advanced Paking Guidance System); 2006 年,西門(mén)子 VDO 公司推出Parkmate泊車(chē)系統;2007年,法雷奧推出Park4U泊車(chē)系統;2008年,大眾推出了 PAV 系統(Park Assist Vision)。
泊車(chē)調度與自動(dòng)泊車(chē)系統建模:
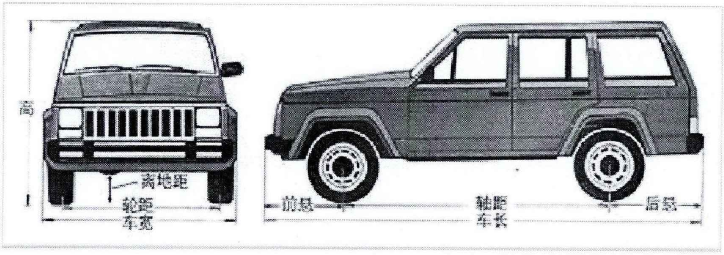
車(chē)輛參數示意圖
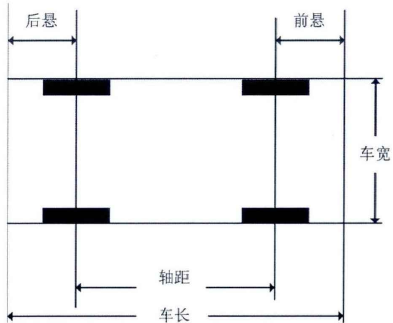
車(chē)輛模型簡(jiǎn)化示意圖
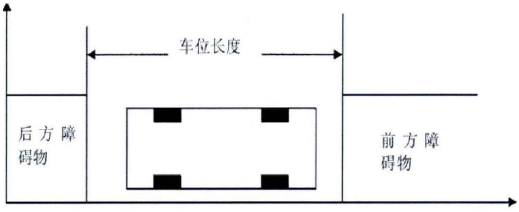
泊車(chē)位模型簡(jiǎn)化示意圖
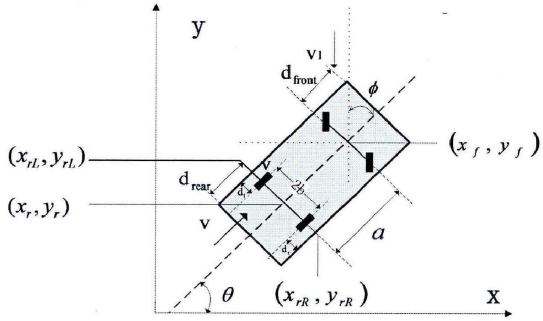
車(chē)輛運動(dòng)學(xué)模型示意圖
目錄
第一章 緒論
1.1 研究背景及意義
1.2 國內外研究現狀
1.2.1 車(chē)載自組織網(wǎng)絡(luò )的巧車(chē)調度研究現狀
1.2.2 自動(dòng)泊車(chē)研究現狀
1.3 本文研究?jì)热?br />
1.4 本文組織結構
第二章 基于車(chē)載自沮織網(wǎng)絡(luò )的泊車(chē)調度
2.1 泊車(chē)位的相關(guān)性
2.1.1 車(chē)輛共享系統設計
2.1.2 相遇概率
2.2 泊車(chē)位的分配協(xié)議
2.3 本章小結
第三章 平行泊車(chē)的系統建模
3.1 泊車(chē)相關(guān)參數描述
3.2 泊車(chē)運動(dòng)學(xué)模型分析
3.3 本章小結
第四章 平行自動(dòng)泊車(chē)的路徑設計
4.1 幾何平行泊車(chē)
4.1.1 平行拍車(chē)策略
4.1.2 泊車(chē)位空間受限泊車(chē)設計
4.1.3 泊車(chē)出庫設計
4.2 回旋曲線(xiàn)平行泊車(chē)
4.2.1 回旋曲線(xiàn)
4.2.2 泊車(chē)路徑設計
4.3 MATLAB 仿真
4.4 本章小節
第五章 平行自動(dòng)泊車(chē)路徑跟蹤控制
5.1 考慮外擾的運動(dòng)學(xué)建模
5.2 線(xiàn)性自抗擾控制器設計
5.3 仿真及實(shí)驗
5.3.1 Matlab仿真
5.3.2 泊車(chē)實(shí)驗
5.4 本章小結
第六章總結與展望
6.1 總結
6.2 展望
參考文獻
致 謝
作者簡(jiǎn)介
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)