24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
’™°°“™
°°°°ΩªÕ® ¬π µƒÓl∑±∞l(f®°)…˙ π∆˚‹á(ch®•)∑¿◊≤¿◊fl_µƒ–Ë«Û¡ø’˝‘⁄≤ªî‡‘ˆ¥Û°£’쌃WµÕ≥…±æ°¢∏fl–‘ƒ‹∆˚‹á(ch®•)∑¿íÏ¿◊fl_ûÈ≥ˆ∞l(f®°)¸c(di®£n),‘O”ã¡À“ª∑NÃΩúy√§Ö^–°°¢–≈ÃñÃé¿Ì∫Ü(ji®£n)ÜŒ°¢úyæ‡≈cúyÀŸæ´∂»∏flµƒ∆˚‹á(ch®•)∑¿íÏ¿◊fl_∞l(f®°)…‰≤®–Œº∞∆‰–≈ÃñÃé¿Ì∑Ω∑®,‘⁄¥Àª˘µA…œ—–÷∆¡À°°“ªøÓ‘ì≤®–ŒÛw÷∆µƒ∆˚‹á(ch®•)∑¿À©¿◊fl_‘≠¿Ìò”ôC°£’쌃÷˜“™π§◊˜»Áœ¬:
°°°° ◊œ»,·òå¶æÄ(xi®§n)–‘’{ÓlflB¿m≤®Ûw÷∆¿◊fl_∂‡ƒøòÀ≈‰å¶èÕÎs∫Õ∂‡÷ÿÓl¬ ÊIøÿ≤®–Œúyæ‡úyÀŸæ´∂»≤Óµƒ»±¸c(di®£n),÷≥ˆ¡À∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ∆˚‹á(ch®•)∑¿◊≤¿◊fl_π§◊˜≤®–Œ,Ωo≥ˆ¡À‘îºöµƒ≤®–ŒÖ¢îµ‘O”ã∫Õ–≈ÃñÃé¿Ì∑Ω∑®°£‘ì≤®–Œüo(w®≤)–˃øòÀ≈‰å¶ΩµµÕ¡À”ãÀ„èÕÎs∂»;Õ®fl^(gu®∞)∂‡ÇÄ(g®®)≤ªƒ£∫˝æ‡ÎxflfÕ∆«ÛΩ‚µƒÃé¿Ì∑Ω Ω÷∏fl¡Àúyæ‡úyÀŸæ´∂»;¿˚”√…œœ¬íflÓl¬ì(li®¢n)∫œÃΩúyúp–°¡À“Ú ’∞l(f®°)–𬩑Ï≥…µƒÃΩúy√§Ö^,Õ®fl^(gu®∞)∑¬’ÊÚû◊C¡À‘ì≤®–ŒµƒÃΩúy–‘ƒ‹;ÎS∫ÛΩo≥ˆ¡À∆˚‹á(ch®•)∑¿íÏë™”√µƒ¿◊fl_∂‡ƒøòÀ∏˙€ô∑Ω∞∏°£
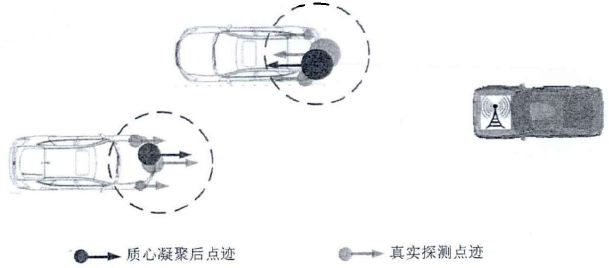
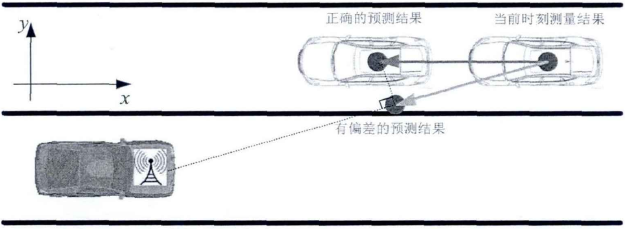
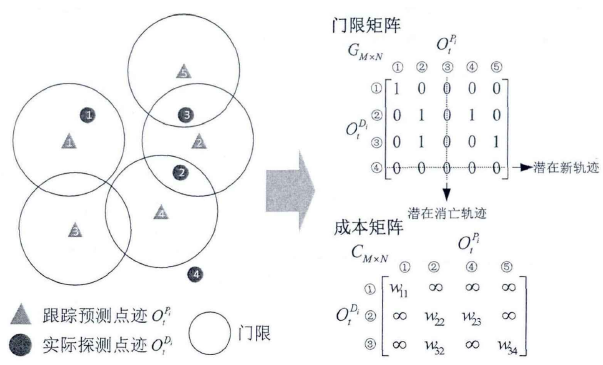
°°°°∆‰¥Œ,ª˘”⁄∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–ŒÛw÷∆—–÷∆¡À“ªøÓ∆˚‹á(ch®•)∑¿◊≤¿◊fl_‘≠¿Ìò”ôC,‘ì¿◊fl_ò”ôCÃÏæÄ(xi®§n)°¢…‰Ól≈c–≈ÃñÃé¿ÌÎä¬∑≤…”√“ªÛwªØ‘O”ã∑Ω Ω,∆‰÷–…‰Ól≈c–≈ÃñÃé¿ÌÎä¬∑‘⁄“ª∆¨”°÷∆∞Â…œåç(sh®™)¨F°£ÕÍ≥…¡À…‰Ól≈c–≈ÃñÃé¿ÌÎä¬∑∞‘≠¿ÌàD≈cPCB‘O”ã°¢¿◊fl_–≈ÃñÃé¿Ì≈cîµì˛Ãé¿Ì‹õº˛‘O”ãWº∞…œŒªôCΩÁ√Ê‘O”ãµ»π§◊˜°£
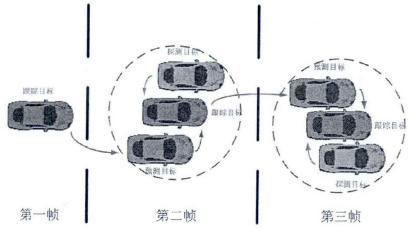
°°°°◊Ó∫Û,Õ®fl^(gu®∞)Õ‚àˆ(ch®£ng)åç(sh®™)úy,Ωo≥ˆ¡Àª˘”⁄∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–ŒÛw÷∆∆˚‹á(ch®•)∑¿◊≤¿◊fl_ò”ôCúyæ‡úyÀŸ–ßπ˚∫Õ∂‡ƒøòÀ∏˙€ô–ßπ˚,Õ®fl^(gu®∞)å¶åç(sh®™)úyΩYπ˚∑÷ŒˆÚû◊C¡À∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–Œº∞∏˙€ô∑Ω∞∏µƒ”––ß–‘°£
°°°°ÍP(gu®°n)ÊI‘~:∆˚‹á(ch®•)∑¿íÏ¿◊fl_;∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ;≤®–Œ‘O”ã;∂‡ƒøòÀ∏˙€ô
Abstract
°°°°Due to the frequent occurrence of traffic accidents, the demand of automotive radar increases. In order t;o reduce the cost of automotive radar and improve its detection performance, a multi-stage linear frequency shift keying (MS-LFSK) waveform for automotive radar, as well as its signal processing method is developed in this thesis. The designed MS-LFSK waveform demonslrates a high deletion precision of range and velocity, a low signal processing load and a small detection blind area. Based on the designed waveform, an automotive radar prototype is developed. The main work is as follows.
°°°°Firstly, to overcome the t:arget-pairing problem in multiple targets situation of LFMCW waveform and low range-velocity measurement precision of multiple frequency shift keying (MFSK) waveform,a multi-sthge linear frequency shift keying (MS-LFSK) waveform for au1;omotive radar is proposed. The waveform paramel:er design procedure and signal processing method are detailed. In MS-LFSK,tihe compWational complexity is reduced with no target-pairing requirement. The precision of ranging and velocity easurement is improved by processing multiple different fiizzy disl;ances recursively. The cktection blind area caused by the transceiver leakage is narrowed due to up and down sweep joint detection. The detection perfbrmance of MS-LFSK is evaluated by the simulation results. After that the radar multi-target tracking scheme is presented.
°°°°Secondly, a principle automotive radar prot;otype based on MS-LFSK is developed. The radar structure is designed to integrate the antenna, radio frequency (RF) module and signal processing module gether. RF and signal processing modules are designed to share the same PCB circuit board. Based on the above radar framework,the schematic and PCB of the RF and signal processing module are implement;ed,as well as the signal processing software, die data processing software and l;he PC display software.
°°°°Thirdly, through outdoors experiments, the detection performance and multi-target tracking performance of MS-LFSKL radar prototype are demonstrated. The effectiveness of detection and tracking method based on MS-LFSK are evaluated through the experiment results.
°°°°Key word: Automotive Radar,Multi-st;age Linear Frequency Shift Keying, Waveform Design, Multi-target Tracking System
°°°°ΩªÕ®±„¿˚ªØûÈΩõ(j®©ng)ù˙øÏÀŸ∞l(f®°)’π÷π©¡Àø…ƒ‹°£◊˜ûÈ∆‰÷–µƒ“ªÜT,«…‹á(ch®•)º∫Ωõ(j®©ng)≥…ûÈ¡À»ÀÇÉ…˙ªÓ÷–≤ªø…ªÚ»±µƒπ§æfl°£∏˘ì˛÷–á¯∆˚‹á(ch®•)π§òI(y®®)Öf(xi®¶)ï˛(hu®¨ )µƒîµì˛Ô@ æ,÷–á¯√øƒÍµƒ∆˚‹á(ch®•)‰N(xi®°o)¡ø‘ˆ∑˘∂º‘⁄5%◊Û”“°£∆˚‹á(ch®•)øµƒ≤ªî‡âດ,‘⁄éßΩo»ÀÇÉ∑Ω±„µƒÕ¨ÿî,“≤‘Ï≥…¡À÷T∂‡Üñ(w®®n)Ó},∆‰÷–”∞Ìë◊Ó¥ÛµƒæÕ «ΩªÕ® ¬π µƒÓl∑±∞l(f®°)…˙°£∏˘ì˛á¯º“Ωy”ã÷–µƒîµì˛Ô@ æ,‘⁄÷–á¯√øƒÍ∆Ωæ˘”–20»f(w®§n)∆ΩªÕ® ¬π ∞l(f®°)…˙,∆‰÷–93%µƒΩªÕ® ¬π «”…”⁄Ò{ÒÇÜT Ë∫ˆ‘Ï≥…,—–æø±Ì√˜Ã·«∞1.5√εƒæØ æ,æÕø……Ÿ90%µƒ◊∑Œ≤ ¬π ,‘⁄ ¬∞l(f®°)«∞1.5√ÎÑx‹á(ch®•),ø…úp…Ÿ70%µƒ»ÀÜTÇ˚Õˆ°£ûÈ¡Àå¢ΩªÕ® ¬π µƒ»ÀÜTÇ˚∫Õìp ßΩµµÕµΩ◊ÓµÕ,∆˚‹á(ch®•)‘Á∆⁄µƒ∞≤»´Ò{ÒÇ‘O”ã÷˜“™∆´œÚ”⁄±ªÑ”(d®∞ng)±£◊o,±»»Á∞≤»´éß°¢úp’ö‚ƒ“µ»µ»°£ÎS÷¯(zh®¥)ø∆ººÀÆ∆ΩµƒÃ·Û{,±ªÑ”(d®∞ng)±£◊o“≤÷ùuœÚ÷˜Ñ”(d®∞ng)ÓAæØ∑ΩœÚfl^(gu®∞)∂…,∆‰÷–∞¸¿®∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµΩy∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµΩyÕ®fl^(gu®∞)∏˜∑Nǘ∏–∆˜´@µ√Æî«∞∆˚‹á(ch®•)÷‹?ch®•)˙µƒ––ÒÇ≠h(hu®¢n)æ≥,≤¢ΩY∫œ◊‘…̵ƒfl\Ñ”(d®∞ng)†ÓëB(t®§i)◊ˆ≥ˆ”––ßµƒùì‘⁄Õ˛√{ÓAæØ°£Õ¨ïr(sh®™),∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµ¿@flă‹∏˘ì˛ÓAæØ–≈œ¢å¶∆˚‹á(ch®•)µƒfl\Ñ”(d®∞ng)†ÓëB(t®§i)º∞ïr(sh®™)≤…»°flmÆ∏…ÓA,胑¥Ó^…œ±£◊C∆˚‹á(ch®•)µƒÒ{ÒÇ∞≤»´°£
°°°°◊˜ûÈ∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµ¿Cµƒ÷˜“™Ãé¿Ì–≈œ¢ÅÌ(l®¢i)‘¥,ÃΩúyǘ∏–∆˜‘⁄œµΩy÷–∆÷¯(zh®¥)ÍP(gu®°n)ÊI–‘µƒ◊˜”√°£ÃΩúyǘ∏–∆˜ƒ‹º∞ïr(sh®™)´@»°∆˚‹á(ch®•)÷‹?ch®•)˙’œµKŒÔµƒæ‡Îx°¢ÀŸ∂»∫ÕΩ«∂»µ»–≈œ¢°£∞¥’’ÃΩúy∑Ω Ω≤ªÕ¨ø…å¢ÃΩúyǘ∏–∆˜∑÷ûÈ“ïÓlÓê(l®®i)ǘ∏–∆˜∫Õœˆfl_Óê(l®®i)ǘ∏–∆˜°£“ïÓlÓê(l®®i)ǘ∏–∆˜÷˜“™¿˚”√îzœÒÓ^”õ‰õÕ‚ΩÁ–≈œ¢,Õ®fl^(gu®∞)Ãÿ’˜Ã·»°µ»àDœÒÃé¿ÌÀ„∑®∑÷Œˆ◊RÑe≥ˆàDœÒ÷–µƒ‹á(ch®•)›vƒøòÀ,埔⁄±ªÑ”(d®∞ng)Óê(l®®i)µƒÃΩúyǘ∏–∆˜°£“ª∞„«Èõrœ¬,ÜŒîzœÒÓ^ø…◊ˆµΩƒøòÀ◊RÑe𶃋,µ´»Áπ˚–Ë“™∏–÷™∆˚‹á(ch®•)÷ÆÈgµƒæ‡ÎxÀŸ∂»–≈œ¢,÷¡…Ÿ–Ë“™2ÇÄ(g®®)îzœÒÓ^–Œ≥…Îpƒø–ßë™°£øÇÛwÅÌ(l®¢i)’f(shu®≠),“ïÓlÓê(l®®i)ǘ∏–∆˜æfl”–ÃΩúyΩ«∂»èV°¢≤…ºØ–≈œ¢ÿSåm°¢Ω¸æ‡ÎxÃΩúyæ´∂»∏flµ»Éû(y®≠u)Ñ›,µ´Õ¨ïr(sh®™)“ïÓlÓê(l®®i)ǘ∏–∆˜µƒÃé¿ÌÀ„∑®èÕÎs°¢”ãÀ„¡ø¥Û,ûÈ¡À◊ˆµΩåç(sh®™)ïr(sh®™)Ãé¿Ì–Ë“™¥Ó≈‰Û{–‘ƒ‹µƒÃé¿Ì«…∆¨,÷∆◊˜≥…±æ›^…Ã;◊˜”√æ‡Îx“ª∞„ûÈ∆’Õ®“ïæ‡,≤¢«“ ‹π‚æÄ(xi®§n)”∞Ìë›^¥Û°£
°°°°¿◊fl_Óê(l®®i)ǘ∏–∆˜“ª∞„埔⁄÷˜Ñ”(d®∞ng)ÃΩúyÓê(l®®i)–ÕµƒÇ˜∏–∆˜,≥£“ä(ji®§n)µƒ¿◊fl_ǘ∏–∆˜∞¸¿®≥¨¬ï≤®Œ∏∫¡√◊≤®¿◊fl_°£≥¨¬ï≤®¿◊fl_Óê(l®®i)À∆”⁄¬ï«…,æfl”–ΩYòã∫Ü(ji®£n)ÜŒ,Ér(ji®§)∏ҵաƵƒÉû(y®≠u)Ñ›°£µ´ «≥¨¬ï≤®¿◊fl_µƒ◊˜”√æ‡Îx“ª∞„‘⁄10√◊É»,üo(w®≤)∑®flM(j®¨n)––flhæ‡ÎxÃΩúy,fl@“≤ «≥¨¬ï≤®¿◊fl_µƒ¡”Ñ›À˘‘⁄°£ƒø«∞,≥¨¬ï≤®¿◊fl\“ª∞„±ªèV∑∫ë™”√”⁄µπ‹á(ch®•)¿◊fl_…œ°£
°°°°º§π‚æfl”–À≤ïr(sh®™)ƒ‹¡ø∏fl,≤® ¯∑ΩœÚ–‘∫√µƒÃÿ¸c(di®£n)°£º§π‚¿◊fl_∆‰≥…±æµÕ¡Æ,úy¡øæ´∂»∏fl,Ãé¿ÌÀŸ∂»øϵ»Éû(y®≠u)¸c(di®£n)‘⁄∆˚‹á(ch®•)úyæ‡ÓI(l®´ng)”Ú÷–æfl”–›^∏fl¿˚”√Ér(ji®§)÷µ°£±Mπ‹»Á¥À,º§π‚¿◊fl_≤¢õ](m®¶i)”–±ªèV∑∫ë™”√,“ªÅÌ(l®¢i) «º§π‚¿◊∑®»›“◊ ‹µΩÃÏö‚≠h(hu®¢n)æ≥“ÚÀÿµƒ”∞Ìë,‘⁄ø’ö‚÷–∑€âm›^∂‡µƒ«Èõrœ¬◊˜”√æ‡Îxï˛(hu®¨ )º±Ñ°œ¬Ωµ;‘ŸÑt‘⁄––ÒÇfl^(gu®∞)≥Ã÷–º§π‚¿◊fl_“ÚûÈ ‹µΩŒÔ¿Ì’Ñ”(d®∞ng)ï˛(hu®¨ )åß÷¬›^¥Ûµƒúy¡ø∆´≤Ó;¥ÀÕ‚,‘⁄∆˚‹á(ch®•)––ÒÇfl^(gu®∞)≥Ã÷–º§π‚¿◊fl_”–“ª∂®∏≈¬ ï˛(hu®¨ )’’…‰µΩ»ÀÛw,”»∆‰ «—€æ¶µ»±»›^√Ù∏–µƒ≤ø∑÷,”…¥À‘Ï≥…µƒÇ˚∫¶ «á¿÷ÿµƒ°£æC…œ,“™å¢º§π‚¿◊fl_”√”⁄∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµΩyÓI(l®´ng)”ÚflÄ”–∫‹∂‡π§◊˜“™◊ˆ°£
°°°°ºtÕ‚¿◊fl_µƒ‘≠¿Ì≈cº§π‚¿◊fl_Óê(l®®i)À∆,∂ºåŸ”⁄π‚åW(xu®¶)Óê(l®®i)ÃΩúy‘Olj,≥˝¡À¥Ê‘⁄ ‹≠h(hu®¢n)æ≥”∞Ìë¥ÛµƒÜñ(w®®n)Ó}Õ‚,∑÷±Ê¡¶µÕ°¢◊˜”√æ‡Îx∂Ó≤ «ºtÕ‚¿◊fl_µƒ“ªÇÄ(g®®)÷¬√¸µƒ»±¸c(di®£n)°£
°°°°∫¡√◊≤®¿◊fl_ «÷∏π§◊˜≤®ÈL(ch®¢ng)‘⁄1∫¡√◊µΩ10∫¡√◊µƒ¿◊fl_°£∫¡√◊≤®¿◊fl_≤ªÉHæfl”–[^…œ¿◊fl_µƒÉû(y®≠u)¸c(di®£n),∂¯«“flÄøÀ∑˛¡ÀÀ¸Çɵƒ≤ª◊„÷ÆÃé°£ ◊œ»,∫¡√◊≤®ë{ΩË∆‰≤®ÈL(ch®¢ng)µƒÉû(y®≠u)Ñ›,æfl”–∫‹è䵃¥©Õ∏¡¶,‘ˆèä¡À◊˜”√æ‡Îx°£¥ÀÕ‚,∫¡√◊≤® ‹≠h(hu®¢n)æ≥”∞Ìë›^–°,º¥ π‘⁄ÍéÃÏ”ÍÃϵƒ«Èõrœ¬◊˜”√æ‡Îx“¿≈f±Ì¨F¡º∫√°£∫¡√◊≤®¿◊fl_µƒ≥ˆ¨F π÷˜Ñ”(d®∞ng)–ÕÃΩúy¿◊fl_µƒ∞l(f®°)’π”–¡ÀŸ|(zh®¨)µƒÔw‹S,Õ¨ïr(sh®™)∫¡√◊≤®¿◊fl_“≤ «∆˚‹á(ch®•)›o÷˙Ò{ÒÇœµΩyµƒÍP(gu®°n)ÊIºº–g(sh®¥)÷Æ“ª°£
°°°°∆˚‹á(ch®•)∑¿◊≤¿◊fl_œµΩy‘O”ã£∫
é¨É»¸c(di®£n)€Eƒ˝æ€ æ“‚àD
∏˙€ô‹â€EÓAπ¿≤ª“‚àD
≥…±ææÿÍá…˙≥… æ“‚àD
ø®†ñ¬¸ûV≤® æ“‚àD
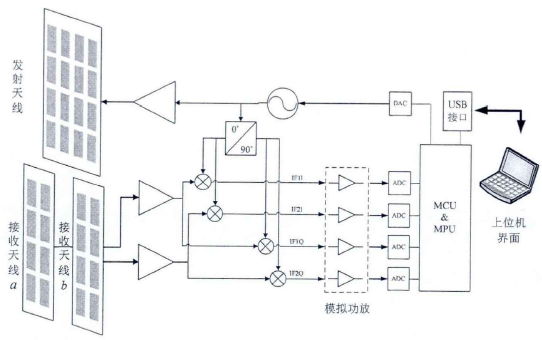
∆˚‹á(ch®•)∑¿◊≤¿◊fl_ΩYòã æ“‚àD
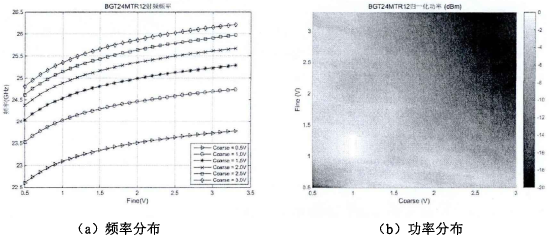
BGT24MTR12–‘ƒ‹åç(sh®™)úyàD
ƒø‰õ
°°°°’™°°“™
°°°°Abstract
°°°°ƒø‰õ
°°°°1 æw’ì
°°°°°°°°1.1 ±æ’nÓ}µƒ—–æø±≥æ∞∫Õ“‚¡x
°°°°°°°°1.2 á¯É»Õ‚—–æø¨F†Ó
°°°°°°°°°°°°1.2.1 á¯Õ‚—–æø¨Fõr
°°°°°°°°°°°°1.2.2 á¯É»—–æø¨Fõr
°°°°°°°°1.3 ±æŒƒµƒ÷˜“™π§◊˜
°°°°2 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–Œ≈c–≈ÃñÃé¿Ì‘O÷≠
°°°°°°°°2.1 æÄ(xi®§n)–‘’{ÓlflB¿m≤®Ûw÷∆π§◊˜≤®–Œ
°°°°°°°°°°°°2.1.1 å¶∑Q(ch®•ng)HΩ«æÄ(xi®§n)–‘’{ÓlflB¿m≤®Ûw÷∆π§◊˜‘≠¿Ì
°°°°°°°°°°°°2.1.2 æÄ(xi®§n)–‘’{ÓlflB¿m≤®+¸c(di®£n)Ól–≈ÃñÛw÷∆π§◊˜‘≠¿Ì
°°°°°°°°°°°°2.1.3 ◊É’{Ól–±¬ æÄ(xi®§n)–‘’{ÓlflB¿m≤®Ûw÷∆π§◊˜‘≠¿Ì
°°°°°°°°°°°°2.1.4 æÄ(xi®§n)–‘’{ÓlflB¿m≤®+Ñ”(d®∞ng)ƒøòÀôzúyÛw÷∆π§◊˜‘≠¿Ì
°°°°°°°°°°°°2.1.5 æÄ(xi®§n)–‘’{ÓlflB¿m≤®Ûw÷∆¥Ê‘⁄µƒÜñ(w®®n)Ó}
°°°°°°°°2.2 ∂‡÷ÿÓl¬ ÊIøÿÛw÷∆≤®–Œ
°°°°°°°°°°°°2.2.1 ∂‡÷ÿÓl¬ ÊIøÿÛw÷∆π§◊˜‘≠¿Ì
°°°°°°°°°°°°2.2.2 ∂‡÷ÿÓl¬ ÊIøÿÛw÷∆¥Ê‘⁄µƒÜñ(w®®n)Ó}
°°°°°°°°2.3 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–Œ
°°°°°°°°°°°°2.3.1 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–ŒΩYòã‘O”ã
°°°°°°°°°°°°2.3.2 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–ŒÖ¢îµ‘O”ã∑Ω∑®
°°°°°°°°°°°°2.3.3 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ≤®–Œæ‡ÎxÀŸ∂»úy¡ø∑Ω∑®
°°°°°°°°°°°°2.3.4 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿΩ«∂»úy¡ø∑Ω∑®
°°°°°°°°°°°°2.3.5 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ…œœ¬íflÓl¬ì(li®¢n)∫œÃΩúy∑Ω∑®
°°°°°°°°2.4 ≤®–Œ–‘ƒ‹∑¬’Ê嶱»
°°°°°°°°°°°°2.4.1 ≤®–ŒÖ¢îµ‘O”ã
°°°°°°°°°°°°2.4.2 –≈ÃñÃé¿Ìfl\À„¡ø
°°°°°°°°°°°°2.4.3 îµì˛ø’Ègµƒ’º”√«Èõr
°°°°°°°°°°°°2.4.4 úyæ‡úyÀŸ–‘ƒ‹∑÷Œˆ
°°°°°°°°°°°°2.4.5 ≤®–Œ–‘ƒ‹øÇΩY
°°°°3 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ∆˚‹á(ch®•)∑¿◊≤¿◊fl_∂‡ƒøòÀ∏˙€ô∑Ω∑®‘O”ã
°°°°°°°°3.1 ∂‡ƒøòÀ∏˙€ôœµΩyøÚº‹
°°°°°°°°3.2 Ã˚É»¸c(di®£n)€Eƒ˝æ€
°°°°°°°°3.3 Ã˚Ègîµì˛ÍP(gu®°n)¬ì(li®¢n)
°°°°°°°°°°°°3.3.1 ∏˙€ô¸c(di®£n)€EÓAúy
°°°°°°°°°°°°3.3.2 …˙≥…≥…±ææÿÍá
°°°°°°°°°°°°3.3.3 Õÿì‰∆•≈‰
°°°°°°°°3.4 ‹â€E≈–∂®
°°°°°°°°3.5 ∏˙€ôûV≤®À„∑®
°°°°4 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ∆˚‹á(ch®•)∑¿◊≤¿◊fl_‘≠¿Ìò”ôC‘O”ã≈cåç(sh®™)¨F
°°°°°°°°4.1 ¿◊fl_œµΩyøÚº‹‘O”ã
°°°°°°°°4.2 –æ∆¨flx–Õ
°°°°°°°°4.3 ∆˚‹á(ch®•)∑¿◊≤¿◊fl_“ªÛwªØ‘O”ã
°°°°°°°°4.4 …‰Ól≈c–≈ÃñÃé¿Ì∞‘≠¿ÌàDº∞PCB‘O”ã
°°°°°°°°°°°°4.4.1 …‰Ólƒ£âKÎä¬∑
°°°°°°°°°°°°4.4.2 ÷–Ólπ¶∑≈Îä¬∑
°°°°°°°°°°°°4.4.3 –≈ÃñÃé¿Ìƒ£âK
°°°°°°°°°°°°4.4.4 VCOøÿ÷∆–≈ÃñÆa(ch®£n)…˙Îä¬∑
°°°°°°°°°°°°4.4.5 Îä‘¥fiDìQƒ£âK
°°°°°°°°°°°°4.4.6 PCB‘O”ã≈cåç(sh®™)¨F
°°°°°°°°4.5 ∆˚‹á(ch®•)∑¿◊≤¿◊fl_‹õº˛‘O”ã
°°°°°°°°4.6 …œŒªôCΩÁ√Ê‘O”ã
°°°°5 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ∆˚‹á(ch®•)∑¿◊≤¿◊fl_úy‘á≈c∑÷Œˆ
°°°°°°°°5.1 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ¿◊fl_ÃΩúy÷∏òÀúy‘á
°°°°°°°°°°°°5.1.1 úy‘á≠h(hu®¢n)æ≥¥ÓΩ®
°°°°°°°°°°°°5.1.2 åç(sh®™)úyΩYπ˚∑÷Œˆ
°°°°°°°°5.2 ∂‡ÎAæÄ(xi®§n)–‘Ól¬ ÊIøÿ¿◊fl_∂‡ƒøòÀ∏˙€ôúy‘á
°°°°°°°°°°°°5.2.1 úy‘á≠h(hu®¢n)æ≥¥ÓΩ®
°°°°°°°°°°°°5.2.2 åç(sh®™)úyΩYπ˚∑÷Œˆ
°°°°6 øÇΩY≈c’πÕ˚
°°°°÷¬£â÷x
°°°°Ö¢øºŒƒ´I
°°°°∏Ω£â‰õ
£®»Áƒ˙–Ë“™≤Èø¥±æ∆™ÆÖòI(y®®)‘O”ã»´Œƒ£¨’àƒ˙¬ì(li®¢n)œµøÕ∑˛À˜»°£©