24ذ،•r(sh¨ھ)ص“خؤ¶¨ضئںل¾€(xi¨¤n)
24ذ،•r(sh¨ھ)ص“خؤ¶¨ضئںل¾€(xi¨¤n)
صھزھ
،،،،»ùسعف†فëٹ™CإcقDدٍëٹ™Cµؤثؤف†ھڑء¢ٍŒ„س(d¨°ng)،¢ثؤف†ھڑء¢قDدٍ(Four-wheelindependent driving and Four-wheel independent steering, 4WID-4WIS)ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)تاز»·Nب«ذآµؤëٹ„س(d¨°ng)ئûـ‡(ch¨¥)ذخت½،£إc‚÷½yئûـ‡(ch¨¥)دà±ب£¬ش“·Nîگ(l¨¨i)ذحµؤëٹ„س(d¨°ng)ئûـ‡(ch¨¥)شعـ‡(ch¨¥)فv¹ؤـ؟طضئ،¢²ظ؟v·€¶¨ذش؟طضئµب·½أو¾كسذںo(w¨²)؟ة±ب”Mµؤƒ(y¨u)„ف،£ح¬•r(sh¨ھ)£¬ك@ز²زâخ¶ضّ(zh¨´) 4WID-4WISëٹ„س(d¨°ng)ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)؟طضئدµ½yذèزھب«ذآµؤرذ¾؟إcشOس‹£¬شOس‹µؤƒ(y¨u)ءسŒ¢Œ¦صûـ‡(ch¨¥)ذشؤـ®a(ch¨£n)ةْضءêP(gu¨،n)ضطزھµؤس°ي‘،£
،،،،±¾خؤزش 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)éرذ¾؟Œ¦دَ£¬»ùسع¸ؤةئئûـ‡(ch¨¥)²ظ؟v·€¶¨ذشµؤا°جل£¬لکŒ¦ثؤف†قDدٍ(Four-wheel steering, 4WS)دµ½y،¢4WIS دµ½y،¢4WID دµ½yµؤ؟طضئ·½·¨زش¼° 4WID دµ½yإc 4WIS دµ½yµؤ…f(xi¨¦)ص{²كآشكM(j¨¬n)ذذةîبëرذ¾؟،£¾كَwرذ¾؟?j¨¬)ببف°üہ¨زشدآژׂ€(g¨¨)·½أو£؛
،،،،(1) ´î½¨ءث°üہ¨ـ‡(ch¨¥)َw„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح،¢GIM ف†ج¥ؤ£ذح،¢ٍŒ„س(d¨°ng)دµ½yؤ£ذحزش¼°قDدٍدµ½yؤ£ذحشعƒبµؤ 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)·آصوؤ£ذح£¬ح¬•r(sh¨ھ)جل³ِءثز»·N»ùسع™M”[½ا¶ب¸ْغ™µؤٌ{ٌ‚†Tؤ£ذح،£لکŒ¦صûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذحكM(j¨¬n)ذذœyش‡·ضخِ£¬ٍ×Cؤ£ذحµؤ؛دہيذش£¬é؛َخؤضذ؟طضئ²كآشµؤرذ¾؟µى¶¨»ùµA،£
،،،،(2) لکŒ¦ 4WS دµ½y£¬ہûسأتص”؟ثظ¶ب؟ى،¢²»ز×دفبë¾ض²؟کOذ،µؤڈ½دٍ»ù؛¯”µ(Radial basis function, RBF)ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )£¬شOس‹ءث 4WS دµ½yµؤ RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷،£
،،،،لکŒ¦شOس‹µؤ RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷£¬·ض„e²ةسأ¨Dض±½سëx¾€(xi¨¤n)س–¾ڑ،¬؛ح¨Dëx¾€(xi¨¤n)س–¾ڑشع¾€(xi¨¤n)ذقص،¬ƒة·N²»ح¬·½·¨كM(j¨¬n)ذذس–¾ڑ،£ض±½سëx¾€(xi¨¤n)س–¾ڑضذجل³ِءثز»‚€(g¨¨)“ا°ًپ+·´ًپ”س–¾ڑ”µ“²ة¼¯†خشھ£¬سأسعس–¾ڑ”µ“µؤ²ة¼¯،£ëx¾€(xi¨¤n)س–¾ڑشع¾€(xi¨¤n)ذقص·¨ضذشOس‹ءثز»‚€(g¨¨)é]h(hu¨¢n)س–¾ڑدµ½y؛حز»‚€(g¨¨) RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )±و×Rئ÷£¬ا°صكسأسعëx¾€(xi¨¤n)س–¾ڑ£¬؛َصكسأسعشع¾€(xi¨¤n)ذقص،£·آصوش‡ٍ±يأ÷£¬ RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷شعئûـ‡(ch¨¥)ظ|(zh¨¬)ذؤ‚بئ«½اµؤ؟طضئ·½أو¾كسذف^؛أµؤ؟طضئذ§¹û£¬¶ّŒ¦سع™M”[½اثظ¶بµؤ؟طضئ…sسذثùا·ب±£¬ك@إc 4WS دµ½yµؤ؟طضئف”³ِ†خز»£¬ںo(w¨²)·¨ح¬•r(sh¨ھ)؛ـ؛أµطM(m¨£n)×مƒة‚€(g¨¨)؟طضئض¸کثµؤ±¾ظ|(zh¨¬)سذêP(gu¨،n)،£
،،،،(3) é؟ث· 4WS دµ½yµؤب±دف£¬كM(j¨¬n)ذذءث 4WIS دµ½yµؤرذ¾؟،£ہûسأ¾€(xi¨¤n)ذش¶´خذح(Linear-quadratic regulator, LQR) ×îƒ(y¨u)؟طضئہيص“£¬شOس‹ 4WIS دµ½yµؤؤ£ذح¸ْغ™ LQR؟طضئئ÷،£ëS؛َ£¬ڈؤـ‡(ch¨¥)فv„س(d¨°ng)ء¦ŒW(xu¨¦)½ا¶ب³ِ°l(f¨،)£¬·ضخِ 4WIS دµ½yµؤقDدٍ„س(d¨°ng)ء¦ŒW(xu¨¦)جطذش£¬زشجل¸كف†ج¥‚بدٍء¦ہûسأآتéا°جل£¬جل³ِز»·N»ùسعـ‡(ch¨¥)فvقDدٍ î‘B(t¨¤i)µؤ 4WIS دµ½yـ‡(ch¨¥)ف†قD½ا·ضإن²كآش،£ہûسأ LQR ؟طضئ…¢”µإc؟طضئف”³ِض®égµؤŒ¦‘ھêP(gu¨،n)دµ£¬Œ¢ 4WIS دµ½yـ‡(ch¨¥)ف†قD½ا·ضإن²كآشس³ةنé LQR ؟طضئ…¢”µص{صû²كآش،£½èضْŒ£(zhu¨،n)¼ز؟طضئث¼دëإcكz‚÷ƒ(y¨u)»¯ثم·¨£¬شOس‹ءث»ùسعŒ£(zhu¨،n)¼ز؟طضئ؛حكz‚÷ƒ(y¨u)»¯µؤ LQR …¢”µص{¹ئ÷£»½èضْؤ£؛؟طضئك‰ف‹£¬شOس‹ءث»ùسعؤ£؛؟طضئµؤ LQR …¢”µص{¹ئ÷،£Œ¢شOس‹µؤƒة‚€(g¨¨)…¢”µص{¹ئ÷·ض„eإcؤ£ذح¸ْغ™ LQR ؟طضئئ÷½Y؛د£¬ک‹شى׃…¢”µ LQR(Varying parameter LQR, VLQR)؟طضئدµ½y،£·آصوش‡ٍ±يأ÷£¬شOس‹µؤƒة‚€(g¨¨) VLQR ؟طضئدµ½y¾ùؤـشع 4WIS دµ½yضذب،µأء¼؛أµؤ؟طضئذ§¹û£¬؟ةح¬•r(sh¨ھ)M(m¨£n)×مظ|(zh¨¬)ذؤ‚بئ«½اإc™M”[½اثظ¶بƒةي—ض¸کث£¬ازŒ¦سعڈٹ‚بدٍïL(f¨¥ng)ز»îگ(l¨¨i)‚بدٍ¸ة”_ز²¾كسذ؛ـ؛أµؤزضضئؤـء¦،£
،،،،(4) شOس‹ءث°üہ¨ـ‡(ch¨¥)ثظ؟طضئ¹¦ؤـ؛حفoضْقDدٍ¹¦ؤـµؤ 4WID ؟طضئدµ½y£¬²¢لکŒ¦4WID دµ½yإc 4WIS دµ½yégµؤ…f(xi¨¦)ص{²كآشكM(j¨¬n)ذذءثرذ¾؟،£Œ¦سع 4WID دµ½yإc 4WIS دµ½y؟ةؤـد໥¸ةةوµؤقDدٍ¹¤›r£¬زہ“ 4WIS دµ½yµؤـ‡(ch¨¥)ف†قD½ا·ضإن²كآش£¬جل³ِءثز»·N¼ب²»س°ي‘ 4WIS دµ½yذشؤـز²²»س°ي‘ذذٌ‚ـ‡(ch¨¥)ثظµؤفoضْقDدٍ¸½¼سقD¾ط·ضإن²كآش£¬Œچ(sh¨ھ)¬F4WID دµ½yفoضْقDدٍ¹¦ؤـµؤح¬•r(sh¨ھ)£¬حê³ة 4WID دµ½yإc 4WIS دµ½yégµؤ…f(xi¨¦)ص{؟طضئ،£
،،،،´ثح⣬Œ¦سعئûـ‡(ch¨¥)µؤٍŒ„س(d¨°ng)·ہ»¬†–(w¨¨n)î}£¬شOس‹ءثز»‚€(g¨¨)»ùسع»¬زئآتéT(m¨¦n)دقضµµؤٍŒ„س(d¨°ng)·ہ»¬؟طضئئ÷£¬كM(j¨¬n)ز»²½حêةئءث 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½y¹¦ؤـ،£·آصوش‡ٍ½Y¹û±يأ÷£¬4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yشعئûـ‡(ch¨¥)·€¶¨ذشجل¸ك،¢کOدق¹¤›rـ‡(ch¨¥)µہ±£³ض،¢ٍŒ„س(d¨°ng)·ہ»¬µب·½أو¾ùؤـب،µأ؛ـ؛أµؤ؟طضئذ§¹û£¬Œ¦سعـ‡(ch¨¥)فvذذٌ‚°²ب«ذشµؤجلةذ§¹ûï@ضّ(zh¨´)،£
،،،،(5) ´î½¨ءث°üہ¨ NI PXI Œچ(sh¨ھ)•r(sh¨ھ)دµ½yس²¼،¢½»ء÷ثإ·ëٹ™C¼°ئنٍŒ„س(d¨°ng)ئ÷،¢½ا¶ب‚÷¸ذئ÷،¢”µ“²ة¼¯؟¨،¢¼سثظ/ضئ„س(d¨°ng)ج¤°ه،¢·½دٍ±P(p¨¢n)،¢¹âëٹ¾ژ´aئ÷زش¼°ةدخ» PC ™Cشعƒبµؤس²¼شعh(hu¨¢n)ش‡ٍئ½إ_،£لکŒ¦´î½¨µؤس²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_زش¼°شOس‹µؤ 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yكM(j¨¬n)ذذœyش‡£¬½Y¹û±يأ÷ش‡ٍئ½إ_ك\ذذء¼؛أ£¬؟ةسأسع 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)؟طضئ·½·¨،¢دµ½yµؤŒچ(sh¨ھ)•r(sh¨ھ)h(hu¨¢n)¾³·آصوش‡ٍ·ضخِ،£شOس‹µؤ 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yشعŒچ(sh¨ھ)•r(sh¨ھ)h(hu¨¢n)¾³دآزہب»¾كسذف^؛أµؤ؟طضئذ§¹û£¬ؤـ‰ٍسذذ§µط¸ؤةئئûـ‡(ch¨¥)µؤ²ظ؟v·€¶¨ذش؛حذذـ‡(ch¨¥)°²ب«،£
،،،،êP(gu¨،n)وIش~£؛ثؤف†ھڑء¢ٍŒ„س(d¨°ng)£¬ثؤف†ھڑء¢قDدٍ£¬ـ‡(ch¨¥)فv²ظ؟v·€¶¨ذش£¬RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئ£¬×ƒ…¢”µ LQR ؟طضئ£¬…f(xi¨¦)ص{؟طضئ
Abstract
،،،،Research on the control and coordination method for 4WID-4WIS electric vehicle The four-wheel independent driving and four-wheel independent steering (4WID-4WIS) electric vehicle is equipped with four in-wheel-motors and four steering motors, which is different from the electric vehicle that only replaces engine with motor. Compared with traditional vehicles, the 4WID-4WIS electric vehicle has more controllable degrees of freedom, and this makes it have unexampled advantages in the view of the saving energy control and the handling stability control. However, this also means that the dynamics control system for the 4WID-4WIS electric vehicle which has a crucial impact on the vehicle performance needs a completely new design and research.
،،،،Based on the vehicle handling stability, the paper focuses on the research of four-wheel steering (4WS) control system, 4WIS control system, 4WID control system and 4WID-4WIS coordination control system. The detailed content of this paper includes a few aspects:
،،،،(1) The 4WID-4WIS electric vehicle dynamics model that contains the 8-DOF vehicle body dynamics model, the GIM tire model, the driving system model and the steering system is established. Meanwhile, a driver model named YAT driver model is proposed based on the yaw angle tracking. The test results prove the rationality and validity of the model. The established 4WID-4WIS electric vehicle dynamics model lays a foundation for later studies.
،،،،(2) A radial basis function (RBF) neural network controller for 4WS system is designed by applying the theory of artificial neural network. The designed RBF controller has been trained by using the direct off-line training method and the off-line training and on-line revising method separately. In the process of the direct off-line training, a ¨Dfeedforward+feedback،¬ data acquisition unit is proposed for the collection of training data. In the process of off-line training and on-line revising, a closed-loop direct training system and a RBF identifier are designed. The former is used for the off-line training, and the latter is used for the on-line revising. The experiment and analysis are shown that, the proposed RBF controller for 4WS system has good control effect on the side slip angle, but less control effect on the yaw rate. Because 4WS system has only one control output that makes it difficult to satisfy two control objectives well.
،،،،(3) The study is extended to the 4WIS system which could overcome the shortcoming of 4WS system. After establishing the ideal vehicle dynamic model, a 4WIS LQR controller for model following purpose is designed by using optimal control theory. Then, from perspective of vehicle dynamics, a steering angle adjustment strategy based on vehicle steering state is proposed by analyzing the 4WIS vehicle dynamic characteristics. The proposed adjustment strategy can improve the utilization of the lateral tire force. Based on the correspondence between the LQR control parameters and control outputs, the wheel steering angle adjustment strategy is mapped to the control parameters adjustment strategy. With the help of expert control theory and genetic algorithm (GA), a GA-based LQR control parameter adjuster is designed. With the help of fuzzy control logic, a fuzzy logic LQR control parameter adjuster is also designed. Two varying parameter LQR (VLQR) control systems are established by combining the model following LQR controller with different control parameter adjuster. Simulation results demonstrate that the VLQR control systems are both have a better control effect, which can meet the side slip angle control objective and the yaw rate control objective simultaneity. Besides, the proposed control systems have strong robustness and good capability of preventing lateral disturbance.
،،،،(4) A 4WID control system has been put forward, which includes the functionalities of vehicle speed control and assist steering control. The coordinated control strategy between 4WID system and 4WIS system is further studied. According to the wheel steering angle adjustment strategy of 4WIS system, an assist steering additional torque allocation strategy of 4WID system is proposed. The proposed allocation strategy will not affect the 4WIS system and not change vehicle speed when the assist steering function of 4WID system works. Through the additional torque allocation strategy, the coordination between 4WID system and 4WIS system is implemented. Furthermore, an acceleration slip regulation based on the slip threshold is designed, which can solve wheel’s skid and improve the function of the 4WID-4WIS coordinated control system. Simulation results demonstrate that the 4WID-4WIS coordinated control system has a great effect on improving vehicle handling stability, keeping lane under extreme condition and acceleration slip, and enhances the vehicle driving and steering safety very significant.
،،،،(5) Hardware-in-loop simulation platform includes NI PXI real-time system hardware, AC servo motors and their drivers, angle sensors, data acquisition cards, drive/brake pedal, steering wheel and photoelectric encoder is established. A few tests about the established hardware-in-loop simulation platform and 4WID-4WIS coordinated control system hardware-in-loop simulation have been completed. The results show that the established hardware-in-loop simulation platform is running well and it can be used for the real-time environment test of 4WID-4WIS dynamics control system. The 4WID-4WIS coordinated control system has ideal control effects in real-time environment, and can effectively improve vehicle handling stability.
،،،،Key words:Four-wheel independent driving, Four-wheel independent steering, Vehicle handling stability, RBF neural network control, Varying parameter LQR control, Coordinate control
،،،،×شئûـ‡(ch¨¥)صQةْµؤز»°ظ¶àؤêہëSضّ(zh¨´)½›(j¨©ng)ْ¼¼ذg(sh¨´)ث®ئ½µؤ¸كثظ°l(f¨،)ص¹£¬ئûـ‡(ch¨¥)µؤ½Yک‹إcذشؤـ½›(j¨©ng)ڑvءث”µ´ْ؟çش½ت½µؤكM(j¨¬n)»¯،¢¸ïذآ[1]،£إc´ثح¬•r(sh¨ھ)£¬ئûـ‡(ch¨¥)µؤ±£سذء؟ز²ëSض®²»”àشِéL(ch¨¢ng)£¬بçˆD 1.1 ثùت¾،£½yس‹±يأ÷£¬2008 ؤêضذ‡ّµؤأٌسأئûـ‡(ch¨¥)±£سذء؟é 5099.6 بf(w¨¤n)فv£¬ئنضذث½¼زـ‡(ch¨¥)±£سذء؟é 3501.4 بf(w¨¤n)فv£¬ص¼ 68.7%،£ضء 2014 ؤ꣬ضذ‡ّأٌسأئûـ‡(ch¨¥)±£سذء؟زرك_µ½ 14598.1 بf(w¨¤n)فv£¬ئنضذث½¼زـ‡(ch¨¥)±بہك_µ½ 82.9%[2-3]،£ئûـ‡(ch¨¥)±£سذء؟µؤ²»”àشِ¼س£¬´ظكM(j¨¬n)ءثئûـ‡(ch¨¥)®a(ch¨£n)کI(y¨¨)ïwثظ°l(f¨،)ص¹µؤح¬•r(sh¨ھ)£¬ز²ژ§پي(l¨¢i)ءثؤـش´¾oب±،¢h(hu¨¢n)¾³خغب¾(بçˆD 1.2 ثùت¾)µبز»دµءذ†–(w¨¨n)î}،£شعؤـش´خ£™C،¢´َڑâخغب¾،¢ىFِ²،¢PM2.5 µبش~…Rزر½›(j¨©ng)¶ْتىؤـش”µؤ½ٌجى£¬رذ°l(f¨،)،¢ضئشى¹ؤـh(hu¨¢n)±£µؤذآذحئûـ‡(ch¨¥)تاثùسذئûـ‡(ch¨¥)ڈؤکI(y¨¨)بث†TثùسذأوإRµؤ¹²ح¬†–(w¨¨n)î}[4-6]،£
،،،،إc²ةسأƒبب¼™C×÷é„س(d¨°ng)ء¦µؤ‚÷½yئûـ‡(ch¨¥)دà±ب£¬²؟·ض»ٍب«²؟²ةسأëٹء¦µؤذآؤـش´ئûـ‡(ch¨¥)¾كسذؤـء؟پي(l¨¢i)ش´ڈV،¢ہûسأآت¸ك£¬؟ةŒچ(sh¨ھ)¬Fµحإإ·إةُضءءمإإ·إ£¬½Yک‹؛†(ji¨£n)†خ،¢¾S×o±مہû£¬¾كسذ¸ü؛أµؤ²ظ؟v·€¶¨ذشإc°²ب«ذشµبضT¶àƒ(y¨u)„ف[7-11]،£أہ‡ّ،¢µآ‡ّ،¢بص±¾µبشS¶à‡ّ¼ز¾ùح¶بë´َء؟ظY½ًإcبثء¦كM(j¨¬n)ذذذآؤـش´ئûـ‡(ch¨¥)µؤرذ°l(f¨،)¹¤×÷[12-15]،£é´ظكM(j¨¬n)ئûـ‡(ch¨¥)®a(ch¨£n)کI(y¨¨)قDذح£¬شِ¼سذذکI(y¨¨)¸‚ ژء¦£¬2012 ؤêخز‡ّ¾حذآؤـش´ئûـ‡(ch¨¥)®a(ch¨£n)کI(y¨¨)°l(f¨،)ص¹†–(w¨¨n)î}°l(f¨،)²¼ءث،¶¹ؤـإcذآؤـش´ئûـ‡(ch¨¥)®a(ch¨£n)کI(y¨¨)°l(f¨،)ص¹زژ„(2012-2020)،·£¬أ÷´_ءثخز‡ّ 10 ؤêƒبêP(gu¨،n)سعذآؤـش´ئûـ‡(ch¨¥)®a(ch¨£n)کI(y¨¨)µؤ؟‚َwؤ؟کث¼°°l(f¨،)ص¹آ·¾€(xi¨¤n)،£2014 ؤê‡ّ„ص(w¨´)ش؛°l(f¨،)²¼ءث،¶êP(gu¨،n)سعكM(j¨¬n)ز»²½×ِ؛أذآؤـش´ئûـ‡(ch¨¥)حئڈV‘ھسأ¹¤×÷µؤح¨ضھ،·£¬شعط”ص·½أو½oسèذآؤـش´ئûـ‡(ch¨¥)ذذکI(y¨¨)كM(j¨¬n)ز»²½ض§³ض،£2016 ؤ꣬خز‡ّلکŒ¦ذآؤـش´ئûـ‡(ch¨¥)µؤحئڈV،¢ذذکI(y¨¨)کثœتزژ·¶،¢³نëٹشOت©µب·½أو³ِإ_ءث¹² 30 ي—دàêP(gu¨،n)ص²ك،£سة´ث؟ةزٹ(ji¨¤n)£¬ذآؤـش´ئûـ‡(ch¨¥)صتاخز‡ّئûـ‡(ch¨¥)ذذکI(y¨¨)خ´پي(l¨¢i)µؤض÷¹¥·½دٍ[16-18]،£
،،،،ذآؤـش´ئûـ‡(ch¨¥)ض÷زھ°üہ¨»ى؛د„س(d¨°ng)ء¦ئûـ‡(ch¨¥)،¢¼ƒëٹ„س(d¨°ng)ئûـ‡(ch¨¥)زش¼°ب¼ءدëٹ³طëٹ„س(d¨°ng)ئûـ‡(ch¨¥)[19-20]،£ئنضذ£¬»ى؛د„س(d¨°ng)ء¦ئûـ‡(ch¨¥)ںo(w¨²)·¨Œچ(sh¨ھ)¬Fصوصءمإإ·إ£¬از¼¼ذg(sh¨´)ئ½إ_½Yک‹ڈحës£¬³ة±¾¸ك£¬²»ز×¾S×o£¬زٍ´ثئن¸ü¶àتا×÷éëٹ„س(d¨°ng)ئûـ‡(ch¨¥)حئڈVك^(gu¨°)³جضذµؤز»·Nصغضذ®a(ch¨£n)ئ·[21]،£ب¼ءدëٹ³طëٹ„س(d¨°ng)ئûـ‡(ch¨¥)ëmب»±»×u(y¨´)éبثîگ(l¨¨i)½»ح¨µؤ×î½K½â›Q·½°¸£¬ب»¶ّ¬FëA¶خ…sتـµ½ڑنڑâµؤء؟®a(ch¨£n)،¢ƒ¦´وإc°²ب«±£صد¼¼ذg(sh¨´)ةذ²»³ةتى£¬إنج×»ùµAشOت©³ة±¾¸كµبêP(gu¨،n)وI¼¼ذg(sh¨´)µؤضئ¼s[22]،£¼ƒëٹ„س(d¨°ng)ئûـ‡(ch¨¥)تاض¸†خ¼ƒزشëٹء¦×÷é„س(d¨°ng)ء¦ش´µؤئûـ‡(ch¨¥)،£ش“·Nîگ(l¨¨i)ذحµؤئûـ‡(ch¨¥)±¾ةي²»®a(ch¨£n)ةْسذ؛¦ڑâَw£¬؟ةŒچ(sh¨ھ)¬Fصوصµؤءمخغب¾£¬ؤـء؟پي(l¨¢i)ش´ڈV·؛ازہûسأآت¸ك£¬½Yک‹؛†(ji¨£n)†خى`»î£¬تاخ´پي(l¨¢i)ئûـ‡(ch¨¥)°l(f¨،)ص¹µؤض÷زھ·½دٍض®ز»[23]،£
،،،،سةسع¼ƒëٹ„س(d¨°ng)ئûـ‡(ch¨¥)زشëٹء¦×÷éؤـء؟ش´£¬²ةسأëٹ™C×÷éˆجذذ™Cک‹£¬زٍ¶ّئنٍŒ„س(d¨°ng)،¢قDدٍدµ½yکOز׌چ(sh¨ھ)¬Fبç·ض²¼ت½ٍŒ„س(d¨°ng)،¢ثؤف†قDدٍµبى`»î¶à׃µؤ²¼ضأؤ£ت½،£»ùسعف†فëٹ™C¼°قDدٍëٹ™Cµؤثؤف†ھڑء¢ٍŒ„س(d¨°ng)(Four-wheel Independent Driving, 4WID)،¢ثؤف†ھڑء¢قDدٍ(Four-wheel Independent Steering, 4WIS)ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)£¬تاز»·N؟ةŒچ(sh¨ھ)¬F¸÷ـ‡(ch¨¥)ف†قD¾ط(°üہ¨ٍŒ„س(d¨°ng)إcضئ„س(d¨°ng)قD¾ط)،¢قDثظ،¢قD½اھڑء¢؟طضئµؤدبكM(j¨¬n)ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)،£ك@·Nذآذحëٹ„س(d¨°ng)ئûـ‡(ch¨¥)µؤƒ(y¨u)„فبçدآ[25-26]£؛
،،،،»ùسعف†فëٹ™Cµؤ 4WID دµ½y(°üہ¨ھڑء¢ٍŒ„س(d¨°ng)؛حھڑء¢ضئ„س(d¨°ng)¹¦ؤـ£¬´ثجژإc؛َخؤضذ؛†(ji¨£n)·Q(ch¨¥ng)é 4WID دµ½y»ٍٍŒ„س(d¨°ng)دµ½y)£¬سةƒبا¶سعف†ف®”ضذµؤëٹ™Cض±½س؟طضئـ‡(ch¨¥)ف†قD¾ط£¬؟ةفpثةŒچ(sh¨ھ)¬Fئûـ‡(ch¨¥)µؤھڑء¢ٍŒ„س(d¨°ng)إcھڑء¢ضئ„س(d¨°ng)£¬ںo(w¨²)ذèت¹سأ‚÷½yئûـ‡(ch¨¥)µؤëx؛دئ÷،¢×ƒثظدنµب‚÷„س(d¨°ng)™Cک‹£¬ك@کس²»ƒHجل¸كءث‚÷„س(d¨°ng)ذ§آت£¬ز²éضئ„س(d¨°ng)·ہ±§ثہدµ½y(Anti-skid BrakeSystem,ABS)£¬ ؟زء¦؟طضئدµ½y(Traction Control System£¬TCS)µب¶à·Nئûـ‡(ch¨¥)ض÷„س(d¨°ng)°²ب«دµ½yµؤشOس‹ژ§پي(l¨¢i)ءث±مہû،£ح¨ك^(gu¨°)ëpٍŒ/ثؤٍŒ?zhu¨،n)¬ا°ٍ?؛ٍَŒذذٌ‚ؤ£ت½égµؤقD“Q£¬ؤـ‰ٍ¸ü¼س³ن·ضµط°l(f¨،)“]ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)شع„س(d¨°ng)ء¦ذش؛ح½›(j¨©ng)ْذشةدµؤƒ(y¨u)„ف،£
،،،،»ùسعقDدٍëٹ™Cµؤ 4WIS دµ½y£¬·إ—‰ءثقDدٍجفذخµؤ™Cذµ½Yک‹£¬±ـأâءث™Cذµ½Yک‹Œ¦ـ‡(ch¨¥)ف†قD½اµؤدقضئ،£´ثح⣬ـ‡(ch¨¥)ف†قD½ا؟ةھڑء¢؟طضئµؤجطüc(di¨£n)ت¹µأض÷„س(d¨°ng)ا°ف†قDدٍ (ActiveFront Steering£¬AFS)£¬ثؤف†قDدٍ(Four wheel steering, 4WS)µبض÷„س(d¨°ng)قDدٍ¼¼ذg(sh¨´)£¬زش¼°™Mزئ،¢شµطقDدٍµبز»ذ©جطتâقDدٍ¹¤›r؟ةزشفpز׌چ(sh¨ھ)¬F£¬M(m¨£n)×م²»ح¬h(hu¨¢n)¾³دآŒ¦ـ‡(ch¨¥)فv™C„س(d¨°ng)ذشµؤ²»ح¬زھاَ،£»ùسعف†فëٹ™C¼°قDدٍëٹ™Cµؤ 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)ضءةظ¾كسذ 8 ‚€(g¨¨)؟ة؟ط×شسة¶ب£¬؟ةح¬•r(sh¨ھ)M(m¨£n)×م¶à·Nـ‡(ch¨¥)فv„س(d¨°ng)ء¦ŒW(xu¨¦)ƒ(y¨u)»¯ؤ؟کث،£´ثح⣬ح¨ك^(gu¨°)…f(xi¨¦)ص{»ٍ¼¯³ة؟طضئ¼¼ذg(sh¨´)£¬؟ةŒچ(sh¨ھ)¬F¶à·Nـ‡(ch¨¥)فvض÷„س(d¨°ng)°²ب«¼¼ذg(sh¨´)égµؤإن؛د£¬ك_µ½„س(d¨°ng)ء¦ذشإc½›(j¨©ng)ْذش،¢·€¶¨ذشإc™C„س(d¨°ng)ذشégµؤد໥…f(xi¨¦)ص{£¬زش¼°ـ‡(ch¨¥)فvذشؤـµؤ¾C؛د×îƒ(y¨u)،£
،،،،سةسع 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)´وشع 8 ‚€(g¨¨)؟ة؟ط×شسة¶ب£¬´َسعـ‡(ch¨¥)فvئ½أوك\„س(d¨°ng)µؤ×شسة¶ب¾S”µ(ز»°مé؟vدٍ،¢™Mدٍ،¢™M”[ 3 ‚€(g¨¨)×شسة¶ب)£¬زٍ´ث 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)Œچ(sh¨ھ)ëHةدتاز»‚€(g¨¨)بكسàت½دµ½y،£بكسàت½دµ½yëmب»ت¹µأدµ½yµؤڈحësذش؛ح؟طضئëy¶بسذثùشِ¼س£¬µ«ح¬•r(sh¨ھ)ز²éبفهe؟طضئ¼¼ذg(sh¨´)µى¶¨ءثس²¼—l¼»ùµA،£Œ¦سعز»‚€(g¨¨)؟ة؟ط×شسة¶ب¾S”µ´َسع؟طضئؤ؟کث¾S”µµؤدµ½y¶ّرش£¬®”ˆجذذئ÷³ِ¬F¹تصد•r(sh¨ھ)£¬؟ةح¨ك^(gu¨°)دà‘ھبفهe؟طضئ²كآشŒچ(sh¨ھ)¬F؟طضئؤ؟کثµؤشظ·ضإن£¬ڈؤ¶ّ±£×C؟طضئؤ؟کثµؤŒچ(sh¨ھ)¬F£¬جل¸كصû‚€(g¨¨)دµ½yµؤ؟ة؟؟ذش،£
،،،،¾Cةدثùتِ£¬»ùسعف†فëٹ™C¼°قDدٍëٹ™Cµؤ 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)²»µ«¾كسذئنثûîگ(l¨¨i)ذحëٹ„س(d¨°ng)ئûـ‡(ch¨¥)¹ؤـ،¢h(hu¨¢n)±£µؤجطüc(di¨£n)£¬ك€¾كسذز×سعŒچ(sh¨ھ)¬F¶à·Nٌ{ٌ‚ؤ£ت½زش¼°¸÷·Nـ‡(ch¨¥)فvض÷„س(d¨°ng)°²ب«¹¦ؤـµؤھڑسذجطة«،£ڈؤéL(ch¨¢ng)كh½ا¶بپي(l¨¢i)؟´£¬4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)¾كسذ؛ـ؛أµؤ°l(f¨،)ص¹ا°¾°£¬·û؛دئûـ‡(ch¨¥)ذذکI(y¨¨)µؤخ´پي(l¨¢i)ع…„ف،£4WID-4WIS دµ½yµؤ؟طضئإc…f(xi¨¦)ص{²كآش×÷é»ùسعف†فëٹ™C¼°قDدٍëٹ™Cµؤ 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)رذ°l(f¨،)µؤضطزھ½M³ة²؟·ض¼°؛ثذؤ£¬Œ¦صûـ‡(ch¨¥)„س(d¨°ng)ء¦ذش،¢·€¶¨ذش،¢توكmذشµب®a(ch¨£n)ةْ›Q¶¨ذشس°ي‘£¬لکŒ¦ك@ز»·½دٍµؤرذ¾؟¾كسذت®·ضضطزھ؛حةîكhµؤ¬FŒچ(sh¨ھ)زâءx،£é´ث£¬±¾خؤŒ¢زش 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)éرذ¾؟Œ¦دَ£¬ةîبëرذ¾؟ 4WID دµ½yإc 4WIS دµ½yµؤ؟طضئ·½·¨£¬زش¼° 4WID دµ½yإc 4WIS دµ½yégµؤ…f(xi¨¦)ص{²كآش،£
ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)ثؤف†قDدٍدµ½y؟طضئشOس‹£؛
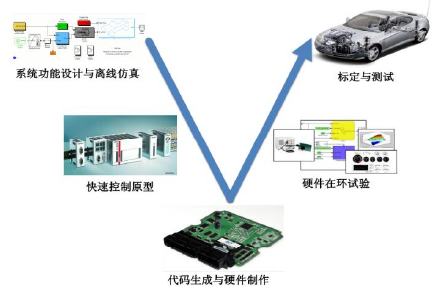
V ذحé_(k¨،i)°l(f¨،)ء÷³ج

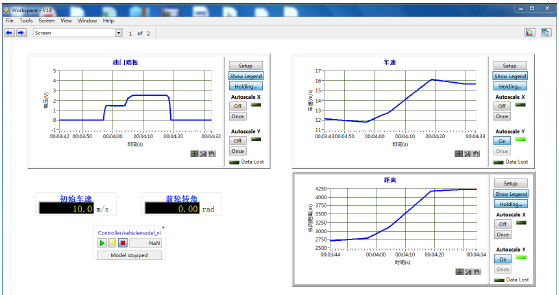
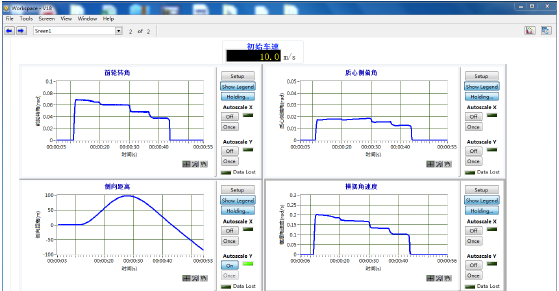
س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_½Yک‹

س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_Œچ(sh¨ھ)خï½Yک‹

خپف†خپ—Uœpثظئ÷

ثإ·ëٹ™C¼°ٍŒ„س(d¨°ng)ئ÷

½ا¶ب‚÷¸ذئ÷

قDدٍ™Cذµ½Yک‹

قDدٍ™Cک‹؟‚³ة

·½دٍ±P(p¨¢n)¼°¹âëٹ¾ژ´aئ÷

ëٹ×س¼سثظإcضئ„س(d¨°ng)ج¤°ه
¼سثظœyش‡ï@ت¾½çأو
قDدٍœyش‡ï@ت¾½çأو
ؤ؟ ن›
،،،،صھ زھ
،،،،Abstract
،،،،µع 1 صآ ¾wص“
،،،،،،،،1.1 رذ¾؟±³¾°¼°زâءx
،،،،،،،،1.2 ‡ّƒبحâرذ¾؟¬F î
،،،،،،،،،،،،1.2.1 ¼ƒëٹ„س(d¨°ng)ئûـ‡(ch¨¥)‡ّƒبحâرذ¾؟¬F î
،،،،،،،،،،،،1.2.2 ¶àف†ٍŒ„س(d¨°ng)دµ½y؟طضئ¼¼ذg(sh¨´)‡ّƒبحâرذ¾؟¬F î
،،،،،،،،،،،،1.2.3 ¶àف†قDدٍدµ½y؟طضئ¼¼ذg(sh¨´)‡ّƒبحâرذ¾؟¬F î
،،،،،،،،،،،،1.2.4 ـ‡(ch¨¥)فv„س(d¨°ng)ء¦ŒW(xu¨¦)دµ½y…f(xi¨¦)ص{/¼¯³ة¼¼ذg(sh¨´)‡ّƒبحâرذ¾؟¬F î
،،،،،،،،1.3 رذ¾؟¬F î¾C؛د·ضخِ
،،،،،،،،1.4 رذ¾؟?j¨¬)ببفإc¼¼ذg(sh¨´)آ·¾€(xi¨¤n)
،،،،µع 2 صآ 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح½¨ء¢
،،،،،،،،2.1 ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح¸إتِ
،،،،،،،،2.2 4WID-4WIS ëٹ„س(d¨°ng)ئûـ‡(ch¨¥)„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح
،،،،،،،،،،،،2.2.1 ـ‡(ch¨¥)فv×ّکثدµإcؤ£ذح؛†(ji¨£n)»¯
،،،،،،،،،،،،2.2.2 ـ‡(ch¨¥)َw„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح
،،،،،،،،،،،،2.2.3 ف†ج¥ؤ£ذح
،،،،،،،،،،،،2.2.4 ـ‡(ch¨¥)ف†„س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح
،،،،،،،،،،،،2.2.5 فoضْس‹ثمؤ£ذح
،،،،،،،،،،،،2.2.6 ٍŒ„س(d¨°ng)دµ½yؤ£ذح
،،،،،،،،،،،،2.2.7 قDدٍدµ½yؤ£ذح
،،،،،،،،2.3 ٌ{ٌ‚†Tؤ£ذح
،،،،،،،،2.4 „س(d¨°ng)ء¦ŒW(xu¨¦)ؤ£ذح·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،2.4.1 ؤ£ذحé_(k¨،i)h(hu¨¢n)ي‘‘ھش‡ٍ
،،،،،،،،،،،،2.4.2 ؤ£ذحé]h(hu¨¢n)ي‘‘ھش‡ٍ
،،،،،،،،،،،،2.4.3 إc Carsim ؤ£ذحŒ¦±ب·ضخِ
،،،،،،،،2.5 ±¾صآذ،½Y
،،،،µع 3 صآ »ùسع RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )µؤ 4WS دµ½y؟طضئ·½·¨رذ¾؟
،،،،،،،،3.1 4WS دµ½y¸إتِ
،،،،،،،،3.2 ـ‡(ch¨¥)فv·€¶¨ذش·ضخِ
،،،،،،،،،،،،3.2.1 ظ|(zh¨¬)ذؤ‚بئ«½اŒ¦ـ‡(ch¨¥)فv·€¶¨ذشµؤس°ي‘
،،،،،،،،،،،،3.2.2 ™M”[½اثظ¶بŒ¦ـ‡(ch¨¥)فv·€¶¨ذشµؤس°ي‘
،،،،،،،،3.3 4WS دµ½yµؤ RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷½Yک‹
،،،،،،،،3.4 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷µؤŒW(xu¨¦)ء•ثم·¨
،،،،،،،،،،،،3.4.1 ص½»×îذ،¶³ثثم·¨
،،،،،،،،،،،،3.4.2 جف¶بدآ½µثم·¨
،،،،،،،،3.5 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷µؤŒW(xu¨¦)ء•س–¾ڑ
،،،،،،،،،،،،3.5.1 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷ŒW(xu¨¦)ء•س–¾ڑ™Cضئ
،،،،،،،،،،،،3.5.2 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷ŒW(xu¨¦)ء•س–¾ڑ™Cضئ
،،،،،،،،3.6 ·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،3.6.1 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷ I ·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،3.6.2 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷ II ·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،3.6.3 RBF ةٌ½›(j¨©ng)¾W(w¨£ng)½j(lu¨° )؟طضئئ÷ I إc؟طضئئ÷ II Œ¦±ب·ضخِ
،،،،،،،،3.7 ±¾صآذ،½Y
،،،،µع 4 صآ »ùسعؤ£ذح¸ْغ™µؤ 4WIS دµ½y؟طضئ·½·¨رذ¾؟
،،،،،،،،4.1 4WIS دµ½y¸إتِ
،،،،،،،،4.2 VLQR ؟طضئدµ½y½Yک‹
،،،،،،،،4.3 ہيدë…¢؟¼ؤ£ذح
،،،،،،،،4.4 ؤ£ذح¸ْغ™ LQR ؟طضئئ÷
،،،،،،،،4.5 …¢”µص{¹ئ÷
،،،،،،،،،،،،4.5.1 LQR ؟طضئ…¢”µ·ضخِ
،،،،،،،،،،،،4.5.2 ؟طضئ…¢”µص{صûزژ„t
،،،،،،،،،،،،4.5.3 »ùسعŒ£(zhu¨،n)¼ز؟طضئإcكz‚÷ƒ(y¨u)»¯µؤ…¢”µص{¹ئ÷
،،،،،،،،،،،،4.5.4 »ùسعؤ£؛؟طضئµؤ…¢”µص{¹ئ÷
،،،،،،،،4.6 ·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،4.6.1 LQR إc VLQR ؟طضئدµ½yŒ¦±بش‡ٍ
،،،،،،،،،،،،4.6.2 VLQR إc GA-VLQR ؟طضئدµ½yŒ¦±بش‡ٍ
،،،،،،،،،،،،4.6.3 GA-VLQR،¢FL-VLQR إc‚÷½y 4WS ؟طضئدµ½yŒ¦±بش‡ٍ
،،،،،،،،،،،،4.6.4 ؟¹‚بدٍïL(f¨¥ng)ش‡ٍ
،،،،،،،،4.7 ±¾صآذ،½Y
،،،،µع 5 صآ 4WID إc 4WIS دµ½y…f(xi¨¦)ص{؟طضئ²كآشرذ¾؟
،،،،،،،،5.1 ـ‡(ch¨¥)فv„س(d¨°ng)ء¦ŒW(xu¨¦)…f(xi¨¦)ص{دµ½y¸إتِ
،،،،،،،،5.2 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½y½Yک‹
،،،،،،،،5.3 4WID ؟طضئدµ½yشOس‹
،،،،،،،،،،،،5.3.1 ـ‡(ch¨¥)ثظ؟طضئئ÷
،،،،،،،،،،،،5.3.2 فoضْقDدٍ؟طضئئ÷¼°ئن¼¤»î—l¼
،،،،،،،،،،،،5.3.3 ـ‡(ch¨¥)ف†¸½¼سقD¾ط·ضإن²كآش
،،،،،،،،5.4 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yٍŒ„س(d¨°ng)·ہ»¬¹¦ؤـ¸ؤكM(j¨¬n)
،،،،،،،،5.5 ·آصوش‡ٍ·ضخِ
،،،،،،،،،،،،5.5.1 é_(k¨،i)h(hu¨¢n)ي‘‘ھش‡ٍ
،،،،،،،،،،،،5.5.2 é]h(hu¨¢n)ي‘‘ھش‡ٍ
،،،،،،،،،،،،5.5.3 Œ¦é_(k¨،i)آ·أوضئ„س(d¨°ng)ش‡ٍ
،،،،،،،،،،،،5.5.4 ٍŒ„س(d¨°ng)·ہ»¬ش‡ٍ
،،،،،،،،5.6 ±¾صآذ،½Y
،،،،µع 6 صآ 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yس²¼شعh(hu¨¢n)·آصوش‡ٍ
،،،،،،،،6.1 س²¼شعh(hu¨¢n)ش‡ٍ¸إتِ
،،،،،،،،6.2 س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_؟‚َw½Yک‹شOس‹
،،،،،،،،،،،،6.2.1 Œچ(sh¨ھ)•r(sh¨ھ)دµ½yس²¼ئ½إ_كxذح
،،،،،،،،،،،،6.2.2 س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_؟‚َw½Yک‹
،،،،،،،،6.3 س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_س²¼²؟·ض
،،،،،،،،،،،،6.3.1 Œچ(sh¨ھ)•r(sh¨ھ)دµ½yس²¼ئ½إ_
،،،،،،،،،،،،6.3.2 ”µ“²ة¼¯؟¨
،،،،،،،،،،،،6.3.3 قDدٍ™Cک‹س²¼
،،،،،،،،،،،،6.3.4 ئنثûس²¼
،،،،،،،،6.4 س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_ـ›¼²؟·ض
،،،،،،،،6.5 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yµؤس²¼شعh(hu¨¢n)ش‡ٍ
،،،،،،،،،،،،6.5.1 س²¼شعh(hu¨¢n)·آصوش‡ٍئ½إ_ش‡ٍœyش‡
،،،،،،،،،،،،6.5.2 4WID-4WIS …f(xi¨¦)ص{؟طضئدµ½yش‡ٍœyش‡
،،،،،،،،6.6 ±¾صآذ،½Y
،،،،µع 7 صآ ب«خؤ؟‚½Yإcص¹حû
،،،،،،،،7.1 ب«خؤ؟‚½Y
،،،،،،،،7.2 رذ¾؟ص¹حû
،،،،…¢؟¼خؤ«I
،،،،¹¥×x²©ت؟ئعégب،µأµؤ؟ئرذ³ة¹û
،،،،ضآ ضx
£¨بçؤْذèزھ²é؟´±¾ئھ®…کI(y¨¨)شOس‹ب«خؤ£¬صˆؤْآ“(li¨¢n)دµ؟ح·ث÷ب،£©