24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
車(chē)輛的目標檢測主要是通過(guò)車(chē)載傳感器對局部環(huán)境感知來(lái)實(shí)現,其中最重要的部分是估計車(chē)輛前方目標的運動(dòng)狀況。車(chē)輛行駛過(guò)程中對前方目標運動(dòng)狀態(tài)的估計是智能車(chē)輔助駕駛系統中的重要研究課題,其主要包括實(shí)時(shí)測量搭載傳感器的實(shí)驗車(chē)與前方目標的相對橫縱向速度、相對橫縱向加速度和相對位置等狀態(tài)變量。傳統的單傳感器目標檢測只能根據傳感器的特性獲取某一方面的數據,而多傳感器可以為縮微車(chē)提供更加完整的數據信息。因此可以將自適應卡爾曼濾波模型和聯(lián)合卡爾曼濾波模型做出融合,達到了避免單傳感器信息采集盲區的問(wèn)題并且提高了濾波器系統穩定性的目的,最終達到提高多數據源信息融合的質(zhì)量目的,為進(jìn)一步的判斷和決策提供了良好的基礎。另一方面采用縮微車(chē)技術(shù)可以降低實(shí)驗成本、降低實(shí)驗風(fēng)險、提高系統維護性并且提供了模擬大規模車(chē)輛的功能,這些特點(diǎn)使得縮微車(chē)成為了智能交通實(shí)驗的良好載體。
本文以場(chǎng)景中的縮微車(chē)為基礎,即每個(gè)車(chē)輛都可以獲得一定范圍內的其他車(chē)輛和障礙物的狀態(tài)信息,通過(guò)以下兩個(gè)方面對該系統進(jìn)行設計與實(shí)現:
(1)實(shí)現對縮微車(chē)前方目標檢測:縮微車(chē)在行駛過(guò)程中通過(guò)攝像頭、雷達和車(chē)載光電編碼器不斷采集車(chē)輛前方的局部交通情況,然后通過(guò) mini2440 處理器對來(lái)自不同傳感器的信息進(jìn)行集中處理。在 mini2440 中將進(jìn)行如下算法:采用基于 HOG+SVM 行人識別提取圖像數據的行人目標、采用區域分割法提取雷達數據的目標運動(dòng)信息以及通過(guò)光電編碼器獲取車(chē)輛自身車(chē)速。最后經(jīng)過(guò)處理的信息將發(fā)送到服務(wù)器端并進(jìn)行數據融合完成局部交通環(huán)境的顯示。
(2)實(shí)現多傳感器數據融合:基于新息自適應卡爾曼濾波,提出了一種多傳感器聯(lián)合濾波的方法來(lái)提高估計前方行駛車(chē)輛的運動(dòng)狀態(tài)的精度。該濾波方式以激光雷達和毫米波雷達作為局部濾波器,通過(guò)自適應過(guò)程實(shí)時(shí)調整局部濾波器的測量噪聲協(xié)方差和系統噪聲協(xié)方差,并利用測量噪聲協(xié)方差計算出聯(lián)合濾波中各局部濾波器的信息分配因子,最后根據信息分配因子來(lái)完成最優(yōu)信息融合并將全局濾波結果反饋到各局部濾波器。聯(lián)合卡爾曼濾波可以結合多種傳感器的測量?jì)?yōu)勢,使每次得到的濾波結果是各個(gè)局部濾波器中最優(yōu)的,并且利用反饋機制提高了測量精度。
根據實(shí)驗結果可知,本文提出的縮微車(chē)目標檢測系統的功能正確完善,可以達到實(shí)時(shí)監控局部交通環(huán)境的目的。同時(shí)聯(lián)合自適應卡爾曼濾波方式有良好的環(huán)境適應能力和系統容錯率,當一個(gè)傳感器的濾波性能出現異常時(shí),該系統的濾波結果并未產(chǎn)生異常。
在整個(gè)實(shí)驗過(guò)程中,該方法相較于標準卡爾曼濾波和單傳感器的新息自適應濾波具有最高的測量精度。
關(guān)鍵詞:目標檢測,運動(dòng)狀態(tài)估計,多傳感器,縮微車(chē),行人識別,聯(lián)合自適應卡爾曼濾波
Abstract
Target detection for vehicles based on local environment perception by vehicle-sensors, then estimating the motion state information of the forwards target. The estimation for driving vehicles is an important research topic in intelligent vehicle auxiliary driving system,it mainly includes the Real-time measurement experimental car carrying sensor and relative horizontal longitudinal velocity, the relative target in front of the transverse longitudinal acceleration and the relative position of state variables.But the single sensor may be easily affected by the environmental change, so the the multi-sensor fusion will be introduced to the miniature intelligent vehicles, the paper proposed a multi-layer filter through extending Innovation-based Adaptive Estimation. Compared with traditional target detection in single sensor, this solution significantly improve accuracy and variety of target information.it adopts multi buffer pools to reduce time error and space error,thereby improving system efficiency. On the other hand, the miniature intelligent vehicles technology can reduce experiment costs and risks, make the experiment easy to maintain and realize simulation of mass vehicle motions, which provides good protection for the experiment.
The paper based on miniature intelligent vehicles in the scene. So every miniature vehicle can get the motion state information of other vehicles and obstacle. The design and implementment of target detection systemis as the following two aspects:
(1) Implementation of miniature car in front of the target detection: Miniature car use cameras,radar and in the process of driving vehicle photoelectric encoder to continually collect vehicle in front of local traffic conditions,then use the mini2440 processor of information from different sensors to centralized processing. In mini2440 the algorithm is as follows: Based on HOG + SVM pedestrian recognition to extract the image data of pedestrian targets, use the region segmentation method to extract the target movement information radar data and use the photoelectric encoder to obtain its own speed.In the end,the information which processing is completed will be sent to the server for data fusion display of local traffic environment.
(2) A multi-sensorial Federated Kalman Filter algorithm based on Innovation-based Adaptive Estimation (IAE) is proposed(JAKF), which is used to estimate motion state of the vehiclesahead. In this system, Lidar and Radar become local filter, local filters adjust measurement noise covariance Rand system noise covarianceQadaptively, then global filter uses the measurement noise covariance and system noise covariance to calculate information allocation factor for Federated Kalman Filtering, finally, according to the information distribution factor to complete the optimal information fusion and the global filtering results feedback to each local filter. Federated Kalman Filter combine advantage of multiple sensors, so the global filtering’s results is optimal than each local filtering’s results, in addition, the feedback mechanism can improve the filter measurement accuracy.
According to the result of experiment shows that the proposed miniature car function of target detection system is correct and can achieve the goal of real-time monitoring local traffic environment.Experiment results show that the algorithm has great adaptive capacity and error-tolerant capacity. When a sensor filtering performance is abnormal, the system of filtering result does not have exception.And the algorithm has the most accurate estimate than the standard one does and single sensor one does.
Keywords:Target detection, Estimation of the motion state, Multi-sensor fusion, Miniature intelligent vehicles, Pedestrian recognition,JAKF
近年來(lái),物聯(lián)網(wǎng)技術(shù)飛速發(fā)展,全球各發(fā)達國家對 ITS 智能交通系統的發(fā)展的重視程度不斷提高。在 ITS 中人、車(chē)與環(huán)境形成一個(gè)緊密聯(lián)系的整體,通過(guò)融合搭載在汽車(chē)上的多種傳感器的信息來(lái)實(shí)現對汽車(chē)周?chē)h(huán)境的感知。當汽車(chē)的周?chē)嬖跐撛谖kU時(shí),ITS 中的汽車(chē)還將收到危險警告,當情況緊急時(shí),ITS 將采取有效措施控制汽車(chē),來(lái)保證行車(chē)安全。而該系統的核心部分在于汽車(chē)主動(dòng)安全的實(shí)現。
仿真技術(shù)的優(yōu)勢在于成本低廉、易于維護、可見(jiàn)性強、可控性?xún)?yōu)良以及安全穩定,因此將其運用在智能交通系統的搭建上有很大的實(shí)用價(jià)值。將仿真技術(shù)運用在智能車(chē)研究上一方面可以保證實(shí)驗結果的真實(shí)性和正確性,另一方面還可以縮減實(shí)驗成本,減少時(shí)間和精力的投入。智能車(chē)輛技術(shù)主要包括三大部分:感知層、決策層和執行層[1]。感知層的工作原理是通過(guò)搭載在車(chē)輛上的通信裝置、電子設備、車(chē)載調度系統以及公路旁的基礎設施中的傳感器,無(wú)線(xiàn)識別等技術(shù),達到在系統中采集所有車(chē)輛的運行信息并進(jìn)行分析計算再加以利用。目前,感知層主要采用多種傳感器融合技術(shù),彌補了傳統單傳感器信息采集的局限性,采集的信息越全面,汽車(chē)的環(huán)境感知效果越好,決策層作出的判斷越準確。采用多傳感器感知技術(shù)的智能車(chē)充分發(fā)揮各個(gè)傳感器的優(yōu)勢,結合不同傳感器的特點(diǎn)進(jìn)行更好的定位、特征估計以及全面和實(shí)時(shí)地對局部交通環(huán)境進(jìn)行評估。例如:激光雷達傳感器可探測智能車(chē)周?chē)欢ǚ秶鷥鹊恼系K物的狀態(tài)信息和運動(dòng)信息,但無(wú)法獲得各個(gè)障礙物的視覺(jué)信息。視覺(jué)信息傳感器可以識別車(chē)道線(xiàn)、識別車(chē)輛周?chē)系K物的類(lèi)型(人、車(chē)、物),但無(wú)法準確地獲取距離信息以及識別目標的詳細狀態(tài)。車(chē)輛內部信息傳感器提供了車(chē)輛內部環(huán)境中的自身屬性,而前兩種傳感器往往無(wú)法獲取該類(lèi)信息。
車(chē)輛附近目標的運動(dòng)狀態(tài)的采集是車(chē)輛自主駕駛功能實(shí)現的基礎,因此車(chē)輛目標運動(dòng)狀態(tài)估計的算法需要更加準確。目前在智能車(chē)輔助駕駛系統中常使用的測距傳感器包括激光雷達和毫米波雷達[2]。DARPA 城市挑戰賽中很多成功的案例表明,這兩類(lèi)傳感器已廣泛應用于車(chē)輛目標檢測[3-5]。激光雷達具有更加精確的檢測精度、更高的精測頻率以及更大的檢測范圍等優(yōu)點(diǎn),并可以直接獲取目標的距離,進(jìn)而通過(guò)簡(jiǎn)單換算獲取目標速度和加速度等參數。但由于激光在傳播中容易衰減的特點(diǎn),激光雷達對環(huán)境和天氣變化的適應性較差,因此在陰天或是雨雪天氣激光雷達的性能將大幅下降。毫米波雷達也是一種可以獲取目標多種狀態(tài)信息的傳感器,毫米波雷達相較于激光雷達在檢測精度上有所降低,但是毫米波具有更優(yōu)秀的穿透能力,受環(huán)境和天氣的影響更小。因此,利用這兩種傳感器具有不同頻譜的特點(diǎn),它們能夠相互補償對方的缺點(diǎn)。這一特性使它們成為傳感器處理和數據融合系統的最佳研究對象[6]。
在局部交通環(huán)境感知的整體框架上,本文提出了一個(gè)客戶(hù)端/服務(wù)器(C/S)架構的微縮仿真實(shí)驗平臺。在交通沙盤(pán)中,五輛縮微小車(chē)(Client)多種傳感器不斷獲取車(chē)輛附近的局部交通環(huán)境,并在多傳感器采集的數據基礎上進(jìn)行行人識別和目標運動(dòng)狀態(tài)信息一區,最后將多源數據和從中提取出的信息進(jìn)行數據分包,以數據包的形式發(fā)送到服務(wù)器(Server)。服務(wù)器的主要功能是對多源進(jìn)行分類(lèi)和融合,并將融合后的數據可以作為局部環(huán)境感知的基礎數據來(lái)實(shí)現為車(chē)輛行駛過(guò)程中四周目標運動(dòng)狀態(tài)的實(shí)時(shí)監控,同時(shí)還可以將融合數據存儲在本地數據庫中。以文獻[7]的聯(lián)合卡爾曼濾波的融合復位結構(FR)和文獻[8]的新息自適應卡爾曼濾波(AKF)為基礎,利用激光雷達和毫米波雷達的數據,提出了一種激光雷達與毫米波雷達組合進(jìn)行目標運動(dòng)狀態(tài)估計的聯(lián)合自適應卡爾曼濾波器(FAKF)。該方法將激光雷達與毫米波雷達作為局部濾波器,各局部傳感器之間以并行的方式進(jìn)行新息自適應濾波,然后通過(guò)坐標轉換和時(shí)間統一對局部濾波器的數據進(jìn)行預處理,最后進(jìn)行聯(lián)合自適應濾波,并將局部濾波器 LF 的測量噪聲協(xié)方差 R 作為計算信息分配因子 β 的依據,β 用來(lái)控制 LF 的狀態(tài)矢量 X 占最優(yōu)融合狀態(tài)的權重和調節 LF的狀態(tài)矢量協(xié)方差 P。當激光雷達傳感器受天氣影響而性能降低時(shí),其對應的 R 隨之增大,相應的 β 也將隨之改變,從而降低該傳感器的數據對整體濾波結果的噪聲污染。本文的濾波方式結合了激光雷達傳感器與毫米波雷達傳感器各自的性能特點(diǎn),實(shí)現了一種更加穩定的環(huán)境適應能力更強的前車(chē)運動(dòng)狀態(tài)測量的方法。
聯(lián)合自適應卡爾曼濾波的縮微車(chē)目標檢測系統模型:
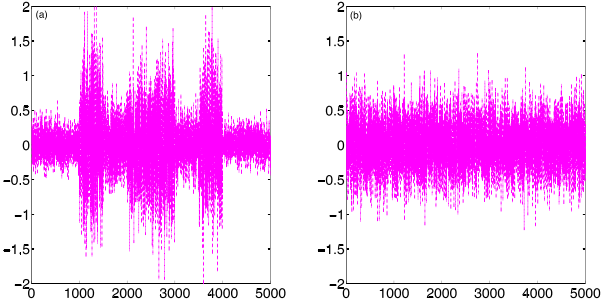
URG 和 ESR 的噪聲強度
噪聲協(xié)方差矩陣
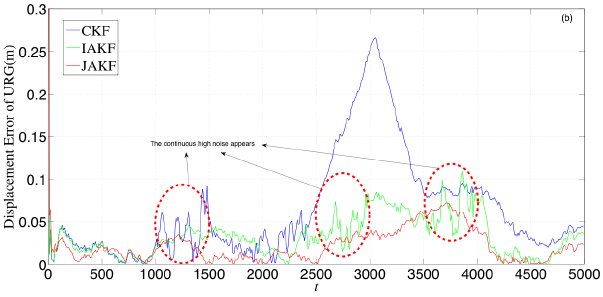
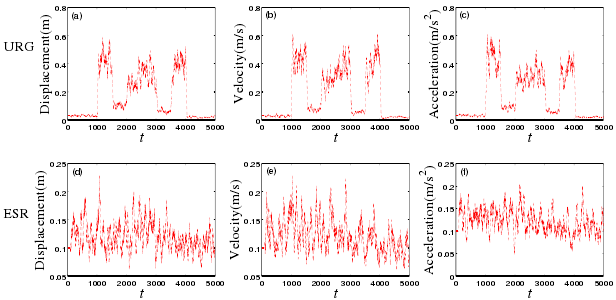
URG 的濾波結果和誤差分析
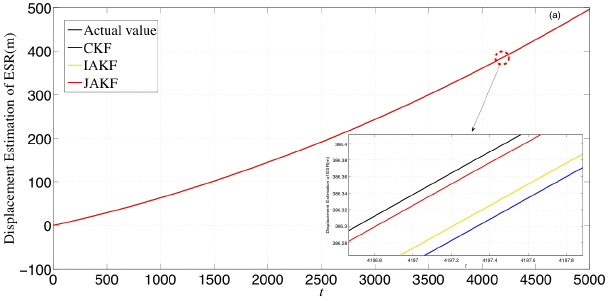
ESR 的濾波結果和誤差分析
目 錄
第 1 章 緒論
1.1 研究背景及意義
1.2 本文的主要工作
1.3 本文的組織結構
第 2 章 相關(guān)工作
2.1 國內外研究現狀
2.1.1 智能交通系統
2.1.2 卡爾曼濾波器
2.2 亟需解決的問(wèn)題
2.3 本文的優(yōu)勢
2.4 本章小結
第 3 章 縮微車(chē)目標檢測系統設計
3.1 系統架構
3.2 客戶(hù)端數據采集系統
3.2.1 視頻模塊與行人識別算法
3.2.2 激光雷達模塊與目標信息提取算法
3.2.3 車(chē)輛內部信息模塊
3.2.4 通信協(xié)議
3.3 服務(wù)器數據處理系統
3.3.1 時(shí)間統一與數據糾正
3.3.2 激光雷達數據與攝像頭數據融合
3.3.3 車(chē)輛定位
3.4 仿真實(shí)驗
3.5 本章小結
第 4 章 聯(lián)合自適應卡爾曼濾波模型分析
4.1 聯(lián)合自適應卡爾曼濾波模型
4.2 局部卡爾曼濾波器
4.3 全局卡爾曼濾波器
4.4 時(shí)間一致性與空間一致性
4.4.1 時(shí)間一致性
4.4.1 空間一致性
4.5 仿真實(shí)驗
4.5.1 可行性驗證
4.5.2 實(shí)驗分析
4.6 本章小結
第 5 章 總結與展望
5.1 全文總結
5.2 未來(lái)工作
參考文獻
作者簡(jiǎn)介及在學(xué)期間所取得的科研成果
致 謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)