24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
自適應巡航控制系統作為智能輔助駕駛的關(guān)鍵技術(shù)之一,目前已成為人們關(guān)注的熱點(diǎn)。本文以汽車(chē)自適應巡航控制系統(ACC)為研究對象,開(kāi)展其車(chē)輛縱向動(dòng)力學(xué)建模和控制策略研究。論文主要完成了以下幾方面的工作:
首先,闡述本文研究背景及意義,從自適應巡航系統應用現狀、車(chē)輛縱向動(dòng)力學(xué)建模、駕駛員跟車(chē)行為特性和自適應巡航控制算法四個(gè)方面對近年來(lái)的最新研究進(jìn)展進(jìn)行了論述,并在此基礎上提出本文研究?jì)热荨?/p>
其次,分析自適應航系統的功能需求和控制目標,同時(shí)考慮自車(chē)的跟蹤性能和舒適性能,設計自適應巡航控制系統體系結構,由上層控制器、下層控制器和自車(chē)模型組成,為后面章節建模和控制策略研究提供技術(shù)路線(xiàn)。
再次,以某自動(dòng)變速器轎車(chē)為對象,分析該車(chē)輛縱向動(dòng)力學(xué)系統的基本結構,基于Matlab/Simulink軟件環(huán)境實(shí)現車(chē)輛縱向動(dòng)力學(xué)仿真建模,用于后面章節控制策略設計和仿真驗證。
然后,針對自適應巡航系統的功能需求和控制目標,研究一種汽車(chē)自適應巡航分層控制算法,上層控制器建立包含自車(chē)控制模型、車(chē)間運動(dòng)學(xué)和車(chē)間時(shí)距的集成式縱向運動(dòng)學(xué)模型,綜合考慮車(chē)距、相對速度和自車(chē)加速度三大性能指標,通過(guò)線(xiàn)性二次最優(yōu)控制理論得到期望的跟車(chē)加速度;下層控制器建立包含驅/制動(dòng)切換邏輯、逆發(fā)動(dòng)機模型和逆制動(dòng)器模型的車(chē)輛逆縱向動(dòng)力學(xué)模型,采用PID控制實(shí)現加速度校正,通過(guò)節氣門(mén)和制動(dòng)器的切換控制,使得車(chē)輛的實(shí)際加速度能夠對上層控制輸出的期望加速度進(jìn)行J?艮蹤。
最后,為了驗證所設計控制算法的有效性和正確性,基于Matlab\Simulink軟件環(huán)境搭建自適應巡航分層控制器,聯(lián)合所建立的車(chē)輛動(dòng)力學(xué)模型,在多種工況下進(jìn)行了仿真驗證。
關(guān)鍵詞:自適應巡航;動(dòng)力學(xué)建模;PID控制;線(xiàn)性二次最優(yōu)控制;分層控制
ABSTRACT
Adaptive cruise control (ACC) system is one of the key technologies of intelligent assisted driving vehicles, which has become the focus of attention. In this paper, taking the adaptive cruise control system as the object of study, the dynamic modeling and control strategies are studied. The main works of this thesis are as follows:
Firstly, the research background and significance of this paper is elaborated, and latest research achievements in recent years are discussed from four aspects, which include the current application situation of ACC system, vehicle longitudinal dynamics model, driver car behavior and adaptive cruise control algorithm. On this basis, the research content of this paper is put forward.
Secondly, the function requirement and control target of adaptive cruise control system are analyzed, the architecture of adaptive cruise control system is designed, composing of the upper controller, lower controller and vehicle model, which provide the technical route for the modeling and control strategy research in following chapters.
Again, taking a vehicle equipped with automatic transmission as research object, the basic structure of the vehicle longitudinal dynamics system is analyzed. Simulation modeling of vehicle longitudinal dynamics based on Matlab/Simulink software environment is conducted, which used for control strategy design and simulation verification in later chapters.
Then, based on the function requirement and control target for adaptive cruise control system, a layered control algorithm is investigated. The integrated longitudinal kinematic model is established in the upper controller, which includes the vehicle model, the kinematics between vehicles and the time interval. The desired acceleration is calculated through linear quadratic optimal control theory, taking into account the vehicle distance, relative speed and acceleration of three major performance indexes. In the lower controller, the vehicle inverse longitudinal dynamics model including the drive / brake switching logic, the inverse engine model and the inverse brake model is established, and the PID algorithm is used to achieve acceleration correction. Through switching control of throttle and brake, the actual acceleration of the vehicle can track the desired acceleration of the upper control output.
Finally, in order to verify the validity and effectiveness of the designed control algorithm, an adaptive cruise hierarchical controller is built based on the Matlab\Simulink software environment, and simulation verification is carried out under a variety of working conditions combining with the vehicle dynamics model.
KEY WORDS: adaptive cruise control, dynamic modeling; PID control; linear quadratic optimal control; hierarchical control
近年來(lái),隨著(zhù)汽車(chē)工業(yè)的飛速發(fā)展和駕駛員的非職業(yè)化,汽車(chē)給人們提供出行便利的同時(shí),帶來(lái)的交通事故、道路堵塞及環(huán)境污染等問(wèn)題也日趨嚴重。提高行車(chē)安全、減少道路交通事故成為人們關(guān)注的熱點(diǎn),開(kāi)展汽車(chē)輔助駕駛系統的研究顯得尤為重要。
汽車(chē)先進(jìn)駕駛輔助系統(ADAS)通過(guò)雷達或攝像頭實(shí)時(shí)對自車(chē)周邊的車(chē)輛、車(chē)道線(xiàn)、障礙物、行人等進(jìn)行識別,然后根據預先設定的控制模式或算法通過(guò)自車(chē)執行器(節氣門(mén)、制動(dòng)系統、轉向機構)的主動(dòng)控制,實(shí)現車(chē)輛的先進(jìn)輔助駕駛功能,預防道路交通事故的發(fā)生。
ADAS通常包括自適應巡航控制系統(ACC)、車(chē)道偏移報警系統(LDWS)、車(chē)道保持系統(LCA或LKS)、防碰撞系統(CAS)、夜視系統(NVS)、自適應燈光控制系統(ALC)、行人保護系統(PPS)、自動(dòng)泊車(chē)系統(APS)、交通標志識別(TSR)、盲點(diǎn)探測(BSP)、駕駛員疲勞探測(Driver drowsiness detection)系統、下坡控制(Hill descent control)系統和電動(dòng)汽車(chē)報警(Electric vehicle warning sounds)系統等。表1.1所不為目前主要ADAS的技術(shù)方案和功能介紹。
汽車(chē)自適應巡航控制(Adaptive Cruise Control, ACC),又稱(chēng)為主動(dòng)或智能巡航控制,是在傳統的定速巡航控制系統基礎上發(fā)展而來(lái),即具有定速巡航功能,又可以通過(guò)車(chē)載傳感器(雷達、激光、光學(xué)攝像頭等)實(shí)時(shí)監測車(chē)輛前方行駛環(huán)境,依據探測到的本車(chē)與前方車(chē)輛之間的相對距離、相對速度等信息,通過(guò)與制動(dòng)防抱死系統、發(fā)動(dòng)機控制系統協(xié)調動(dòng)作,使車(chē)輛與前方車(chē)輛始終保持安全行車(chē)距離,增強汽車(chē)行駛安全性。ACC是一種智能化的自動(dòng)控制系統,對于減輕駕駛負擔、提高乘坐舒適性、減少駕駛操作失誤、提高道路使用能力和降低燃油消耗都具有重要意義。
據市場(chǎng)調研機構估計,全球自適應巡航控制市場(chǎng)在2014-2018年期間達到15.8%的年復合增長(cháng)率,到2020年全球7.2%的新車(chē)都將配備該系統。然而ACC系統目前的價(jià)格仍然較高,在中國選配ACC的價(jià)格往往需要數萬(wàn)元,因此在2015年,豪華車(chē)(C級及以上)裝配的ACC系統占據了 75%的市場(chǎng)份額。
目前,智能駕駛汽車(chē)作為我國實(shí)現“中國制造2025”規劃的重要一環(huán),對汽車(chē)產(chǎn)業(yè)轉型升級和上游產(chǎn)業(yè)發(fā)展都有著(zhù)積極的意義。在眾多的汽車(chē)先進(jìn)駕駛輔助系統中,自適應巡航系統被消費者接受度最高且應用最廣。因此,開(kāi)展汽車(chē)自適應巡航控制系統研究對于改善道路交通擁堵問(wèn)題、避免交通事故的發(fā)生、減少燃油消耗和二氧化碳排放、增大汽車(chē)大數據發(fā)展潛力,以及潛在的工業(yè)和物流領(lǐng)域運用都有重大意義。
關(guān)于A(yíng)CC的歷史起源于20世紀70年代。1971年,美國伊頓公司開(kāi)始從事這方面的開(kāi)發(fā),其雛形是日本三菱公司提出的PDC (Preview Distance Control)系統,它將雷達與其他處理器一起考慮,可以探查車(chē)距的變化,并對駕駛員發(fā)出警告,系統還可以控制節氣門(mén)開(kāi)度對發(fā)動(dòng)機的功率進(jìn)行調節。此后豐田、本田、通用、福特、戴姆勒、博世等公司也投入到了研發(fā)行列。近年來(lái),德國的大陸特威斯公司致力于汽車(chē)安全行駛的全方位研究,也在加緊對車(chē)用雷達系統的開(kāi)發(fā)。該公司開(kāi)發(fā)出采用微波雷達技術(shù)和紅外傳感技術(shù)兩類(lèi)ACC系統產(chǎn)品,可探測出前方150米范圍內的目標車(chē)輛與本車(chē)間的車(chē)距和相對速度,在自動(dòng)進(jìn)行安全車(chē)距控制時(shí),發(fā)動(dòng)機和傳動(dòng)系工作穩定,乘坐舒適。為了進(jìn)一步提高自適應巡航控制系統的性能,該公司還提供了與能見(jiàn)度相關(guān)的車(chē)速推算系統,以及為縮短制動(dòng)系反應時(shí)間的電子輔助制動(dòng)助力裝置。
自適應巡航系統包括雷達模塊、數字信號處理模塊和控制單元。通常駕駛員事先設定所希望的期望車(chē)速,自適應巡航系統利用雷達或紅外線(xiàn)光束探測自車(chē)與前車(chē)距離,獲得前車(chē)的確切方位,如果監測到前車(chē)減速或監測到新目標,系統就會(huì )通過(guò)CAN總線(xiàn)發(fā)送執行信號給發(fā)動(dòng)機或制動(dòng)系統,使得自車(chē)與前車(chē)保持在一個(gè)安全距離。
汽車(chē)自適應巡航控制系統(ACC)控制技術(shù):
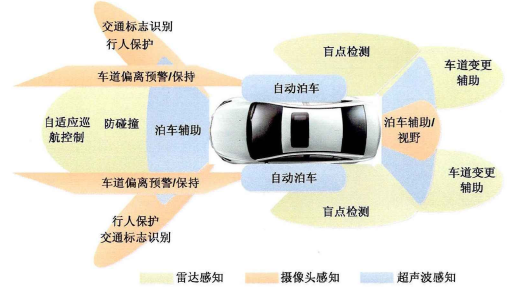
汽車(chē)ADAS系統

自適應巡航控制系統
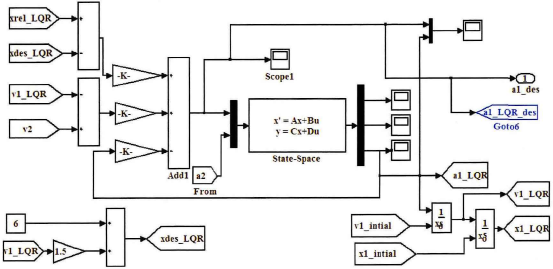
上層控制器仿真模型
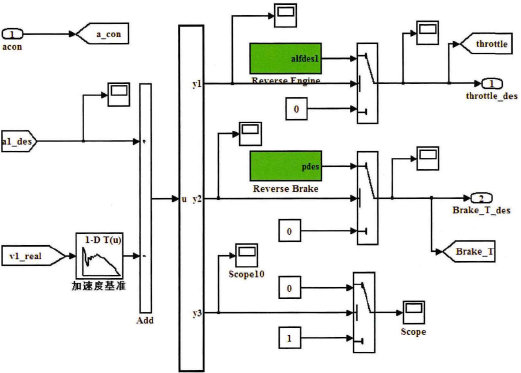
逆縱向動(dòng)力學(xué)仿真模型
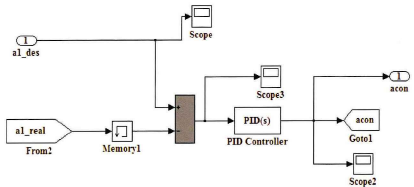
下層控制器仿真模型
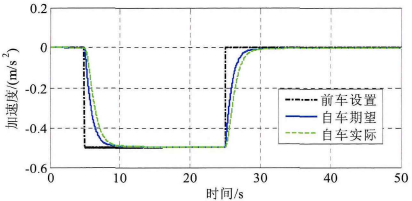
加速度時(shí)間歷程
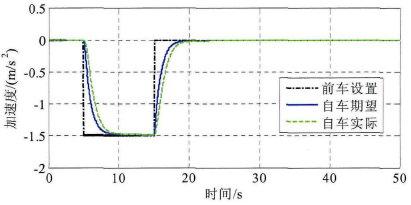
加速度時(shí)間歷程
目錄
第一章 緒論
1.1 論文研究背景及意義
1.2 國內外相關(guān)技術(shù)應用與研究現狀
1.2.1 自適應巡航控制系統應用現狀
1.2.2 車(chē)輛縱向動(dòng)力學(xué)建模
1.2.3 駕駛員跟車(chē)行為特性
1.2.4 自適應巡航控制算法
1.3 本文研究?jì)热?br />
第二章 汽車(chē)自適應巡航控制系統體系架構設計
2.1 控制目標及需求分析
2.2 體系架構設計
2.3 本章小結
第三章 汽車(chē)自適應巡航系統縱向動(dòng)力學(xué)建模
3.1 車(chē)輛縱向動(dòng)力學(xué)建模
3.1.1 發(fā)動(dòng)機建模
3.1.2 液力變矩器建模
3.1.3 變速器建模
3.1.4 車(chē)輪轉動(dòng)動(dòng)力學(xué)建模
3.1.5 車(chē)輛縱向動(dòng)力學(xué)建模
3.2 自適應巡航系統執行器建模
3.2.1 電子節氣門(mén)建模
3.2.2 液壓制動(dòng)器建模
3.3 車(chē)輛縱向動(dòng)力學(xué)模型仿真驗證
3.3.1 基于Matlab/Simulink的車(chē)輛動(dòng)力學(xué)仿真建模
3.3.2 仿真結果分析
3.4 本章小結
第四章 汽車(chē)自適應巡航系統控制策略研究
4.1 自適應巡航系統控制策略架構
4.2 自適應巡航系統上層控制器設計
4.2.1 PID定速巡航控制
4.2.2 LQR車(chē)距保持控制
4.3 自適應巡航系統下層控制器設計
4.3.1 車(chē)輛逆縱向動(dòng)力學(xué)建模
4.3.2 自適應巡航系統下層控制器設計
4.4 本章小結
第五章汽車(chē)自適應巡航控制系統仿真驗證
5.1 控制器設計和仿真工況設置
5.2 前車(chē)加速工況仿真驗證
5.2.1 前車(chē)以小定加速度加速行駛工況
5.2.2 前車(chē)以大定加速度加速行駛工況
5.3 前車(chē)定減速工況仿真驗證
5.3.1 前車(chē)以小定減速度制動(dòng)工況
5.3.2 前車(chē)以大定減速度緊急制動(dòng)工況
5.4 前車(chē)正弦加、減速工況仿真驗證
5.4.1 前車(chē)速度以小正弦加減速工況
5.4.2 前車(chē)速度以大正弦加減速工況
5.5 本章小結
第六章 總結與展望
6.1 全文總結
6.2 不足與展望
致謝
參考文獻
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)