24РЎ•r(shЁӘ)Х“ОД¶ЁЦЖҹбҫҖ(xiЁӨn)
24РЎ•r(shЁӘ)Х“ОД¶ЁЦЖҹбҫҖ(xiЁӨn)
ХӘТӘ
ЎЎЎЎЖыЬҮ(chЁҘ)БгІҝјюЩ|(zhЁ¬)БҝҢҰЖыЬҮ(chЁҘ)ХыуwРФДЬУРЦш(zhЁҙ)ЦШТӘУ°н‘ЎЈЖыЬҮ(chЁҘ)БгІҝјюФЪЙъ®a(chЁЈn)јУ№ӨНкіЙәу,РиИўҢҰЖдЩ|(zhЁ¬)БҝЯM(jЁ¬n)РРҷzңyЎЈӮчҪyҢҰБгІҝјюЩ|(zhЁ¬)БҝөДҷzңyЦчТӘКЗНЁЯ^(guЁ°)ИЛ№Ө»тХЯЭoЦъДі·NҷCЖчНкіЙөДЎЈКЬПЮУЪИЛұҫЙн оӣrөДПЮЦЖ,ҷzңyҫ«¶ИІ»ёЯ,Н¬•r(shЁӘ)ҹo(wЁІ)·ЁҢҚ(shЁӘ)¬FҙуТҺДЈөДЧФ„У(dЁ°ng)»ҜЙъ®a(chЁЈn)ЎЈ°йлSЦш(zhЁҙ)Я@·NРиЗу,ҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)ұ»ТэИлөҪЖыЬҮ(chЁҘ)БгІҝјюҷzңyЦРЎЈ
ЎЎЎЎҷCЖчТ•УX(juЁҰ)ҷzңyјјРg(shЁҙ)НЁЯ^(guЁ°)№ӨҳI(yЁЁ)ПаҷCІЙјҜДҝҳЛОпјюөДҲDПс,УГҲDУаМҺАнЬӣјюҢҰЖдМҺАнөГөҪҷzңyҪY№ы,ІўУЙҝШЦЖЖчІЙИЎПа‘ӘөДҲМРРІЩЧчЎЈФ“јјРg(shЁҙ)ҫЯУР·ЗҪУУ|ЎўҢҚ(shЁӘ)•r(shЁӘ)Ўўҫ«¶ИёЯЎўұгУЪЧФ„У(dЁ°ng)»Ҝ№ЬАнөДМШьc(diЁЈn)ЎЈ
ЎЎЎЎбҳҢҰЖыЬҮ(chЁҘ)УНх№Ц§“ОКгЯ@Т»ЖыЬҮ(chЁҘ)БгІҝјюөДҷzңy,ОТӮғМбіцБЛУГҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)Ғн(lЁўi)ҙъМжФӯҒн(lЁўi)ӮчҪyөДИЛ№ӨҷzңyЎЈұҫОДҸДПөҪyөДЬӣУІјюјЬҳӢФOУӢЎўҮшПсЗеОъ¶ИФuғr(jiЁӨ)Ўў»щУЪҒҶПсЛШөДЦ§“О—UҺЧәОіЯҙзңyБҝЎўТФј°·Ц”zҝШЦЖФOӮдөИ·ҪГжЯM(jЁ¬n)РРСРҫҝ,НкіЙБЛНкХыөДЦ§“ОКгөДҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪyЎЈ
ЎЎЎЎПөҪyҪYҳӢІЙУГМШКвөД№вФҙҶОФӘЖеүKәНҲDПсІЙјҜДЈүK,ҪMіЙҷCЖчТ•УX(juЁҰ)ПөҪyЎЈН¬•r(shЁӘ),МбіцБЛҹo(wЁІ)…ўҝјҲDПсЗеОъ¶ИФuғr(jiЁӨ)Лг·ЁNRFSIM(No-Reference Feature Similarity)ЎЈ
ЎЎЎЎУЙУЪҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪyөДҷCРөХр„У(dЁ°ng)ҘмҒVј°Ц§“О—UөДПаҢҰЯ\„У(dЁ°ng)Ң§ЦВБЛіЙПсөДДЈәэ,ҮАЦШУ°н‘БЛәуАmңyБҝЎЈТА“ю¶юҙОЖеәэҲDПсЗеОъ¶ИҷzңyФӯАн,ұҫОДҢўУР…ўҝјөДҮъПсЩ|(zhЁ¬)БҝФuғr(jiЁӨ)Лг·Ё FSIM (Feature Similarity Index for Image Quality Assessment)‘ӘУГөҪҹo(wЁІ)…ўҝјҲDПсЗеОъ¶ИФuғr(jiЁӨ)Лг·ЁIМбіцБЛ NRFSMЛг·ЁЎЈФ“Лг·ЁФЪ¶аҲц(chЁЈng)ҫ°ҲDПсәНФ“ПөҪyЦ§ҙЭКгҮъПсЗеОъ¶ИЕР”аЙПөДЛг·ЁРФДЬЯhғһ(yЁӯu)УЪ»щУЪҲDПсМЭ¶ИөДЗеОъ¶ИФuғr(jiЁӨ)Лг·ЁЎЈ
ЎЎЎЎМбіцБЛ»щУЪҒҶПсЛШөДЦ§ҙЭКгіЯҙзңyБҝЛг·ЁЎЈІЙУГ»щУЪ”MәП·ЁөДҒҶПсЛШЯ…ҫүҷzңyЛг·ЁЯM(jЁ¬n)РРҲDБЕЯ…ҫүҷzңy,ФЪЦ§ХD—UіЯҙзөДңyБҝЦРСРҫҝБЛ WЦұҫҖ(xiЁӨn)ЖҪ„Х(wЁҙ)ңyҫаЛг·ЁәНWьc(diЁЈn)ңyҫаЛг·Ё,НЁЯ^(guЁ°)ҢҚ(shЁӘ)тһтһЧCұнГчWьc(diЁЈn)ңyҫаЛг·ЁФЪФ“ҷzңyПөҪyК№УГЦРІВ¶ИёьёЯЎЈ
ЎЎЎЎЯM(jЁ¬n)Т»ІҪСРҫҝБЛФЪФ“ПөҪyПВөДПаҷCҳЛ¶Ё·Ҫ·Ё,Іўй_(kЁЎi)°l(fЁЎ)БЛЦ§#—UіЯҙзҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪy,ТСН¶ИлөҪҢҚ(shЁӘ)•r(shЁӘ)Йъ®a(chЁЈn)Щ|(zhЁ¬)ЦГ“мңyЦР,ҢҚ(shЁӘ)тһтһЧCФ“ПөҪyҫЯУРЧгүтөДЦШҸНІВ¶ИәНҷzңyІВ¶ИЎЈ
ЎЎЎЎұҫОДМбіцөДЛг·ЁWј°ФOУӢөДПөҪy·Ҫ°ё,І»ғHғHУГУЪ®”З°өДҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪy,ТІҝЙТФНЖҸVөҪЖдЛыоI(lЁ«ng)УтЦРК№УГЎЈ
ЎЎЎЎкP(guЁЎn)жIФ~ЈәҷCЖчТ•УX(juЁҰ),ЖыЬҮ(chЁҘ)УНПөЦ§“О—U,ҢҚ(shЁӘ)•r(shЁӘ)ҷzңy,ҲDПсЗеОъ¶ИФuғr(jiЁӨ),іЯҙзңyБҝ
Abstract
ЎЎЎЎThe quality of automobile parts has an important impact on the overall performance of the automobile.th is necessary to evaluate the quality of the automobUe parts after they are made up. Traditionally, the quality of parts is detected mainly by manual inspection or by the aixxiliary machines. Because of their limitations, the detection accxiracy is not high, and large-scale automated production cannot be achieved. So with this demand, the machine vision technology has been introduced into automotive parts' detection. The machine vision detection t:echnology uses die industrial cameras to capture the images of the target object and the image procething software to get the results of its detection. Then the related controller realizes the appropriate operation. This technology has the advantages of non-contact, real-time, high precision, and easy to automate the management features.
ЎЎЎЎToward the automatic detection of automobUe oЎЈpump supporting bar,we propose the method to realize the detection by using the machine vision to replace the original traditional manual detection. In this thesis, the real-time detection system of the supporting bar is completed by designing the hardware and software architecture, image definition evaluation, sub-pixel-based support bar geometry measurement, and sorting control equipment.
ЎЎЎЎThe software and hardware structure of the vision system adopts special light source module and the image sensor module. At the same time, a no-reference image definition evaluation algorithm NRFSIM (No-Reference Feature Similarity) is proposed. Because of the mechanical vibration of the real-time detection system and the relative motion of the supporting rods,there is &e blurring in the subsequent captured images. In this thesis, The NRFSIM algorithm is proposed by appljdng a reference image quality assessment algorithm FSIM (Feature Similarity Index for Image Quality Assessment)ththe no-reference image definition evaluation algorithm.
ЎЎЎЎThe performance of the proposed algorithm is better than that of image definition evaluation algorithm based on the image gradient in the multi-scene image and the support bar image definition evaluation of the system.
ЎЎЎЎA novel algorithm is proposed for measuring the size of supporting bar based on the sub-pixel processing. Sub-pixel edge detection algorithm is based on the fitting method to detect the edge of the image. For the size measxirement of the supporting bar, the algorithm of rectilinear range finding and point ranging algorithm are studied.
ЎЎЎЎFinally, the experimental results show that the point ranging algorithm of detection system is of higher accuracy. Nevertheless,the camera calibration method system is carried, and the real-time detection and sorting system for the supporting bar dimension is further developed, which has been applied in real-time production quality inspection. The results prove that the system has enough repeat precision and detection precision. The proposed algorithm and the design of the system can also be used for the inspection of other application areas of the industrial parts manufacturing.
ЎЎЎЎKeywords: Machine vision. Automobile Oil Pump Supporting Bar, Real-time Detection System, Image Defmition Evalxjation, Size Measurement.
ЎЎЎЎӮчҪyөД№ӨҳI(yЁЁ)Йъ®a(chЁЈn)Я^(guЁ°)іМЦР,Йъ®a(chЁЈn)РЕПў»ҜәНЧФ„У(dЁ°ng)»ҜіМ¶ИЭ^өН,ҸНлsөДЙъ®a(chЁЈn)НхРтНщНщТФИЛ№ӨІЩЧчһйЦчЎЈИЛөДёР№ЩәНуwһй—lјюЦЖјsЦш(zhЁҙ)Йъ®a(chЁЈn)өДјУ№ӨЛ®ЖҪәНЙъ®a(chЁЈn)ТҺДЈ,Я@Р©Ң§ЦВБЛӮчҪy№ӨҳI(yЁЁ)Йъ®a(chЁЈn)·ҪКҪҹo(wЁІ)·ЁқM(mЁЈn)Чг¬Fҙъ»ҜЙъ®a(chЁЈn)РиЗуЎЈлSЦш(zhЁҙ)ЦРҮш№ӨҳI(yЁЁ)өДСёЛЩ°l(fЁЎ)Х№,УЙ„Ъ„У(dЁ°ng)ГЬјҜРНөДЙъ®a(chЁЈn)·ҪКҪПтјјРg(shЁҙ)ГЬјҜРНөДЮDЧғЯ^(guЁ°)іМ,ҢҰ№ӨҳI(yЁЁ)ҝЖјјіМ¶ИТӘЗуФҪҒн(lЁўi)ФҪёЯЎЈ®a(chЁЈn)Ж·Щ|(zhЁ¬)БҝҷzңyКЗ№ӨҳI(yЁЁ)Йъ®a(chЁЈn)Я^(guЁ°)іМЦРІ»ҝЙИұЙЩөДТ»өА№ӨРт,ҷzңyјјРg(shЁҙ)УЦӣQ¶ЁЦш(zhЁҙ)Я@өА№ӨРтөДР§ВКәНҫ«¶ИЎЈҸД¶ш¬Fҙъ»Ҝ№ӨҳI(yЁЁ)Йъ®a(chЁЈn)ҢҰПа‘ӘөДҷzңyјјРg(shЁҙ)МбіцБЛёьёЯөДТӘЗуЎЈ
ЎЎЎЎ21КАјoТФҒн(lЁўi),ЖыЬҮ(chЁҘ)РРҳI(yЁЁ)СёГН°l(fЁЎ)Х№ЎЈЖыЬҮ(chЁҘ)БгІҝјюЩ|(zhЁ¬)БҝҢҰЖыЬҮ(chЁҘ)ХыуwРФДЬУРЦш(zhЁҙ)ЦШТӘ№Ин‘ЎЈЖыЬҮ(chЁҘ)БгІҝјюФЪЙъ®a(chЁЈn)јУ№ӨНкіЙәу,РиТӘҢҰЖдЩ|(zhЁ¬)БҝЯM(jЁ¬n)РРҷz:ңyЎЈӮчҪyҢҰБгІҝјюЩ|(zhЁ¬)БҝөДҷzңyЦчТӘКЗНЁЯ^(guЁ°)ИЛНх»тХЯЭoЦъДі·NҷCЖчЯM(jЁ¬n)РРНкіЙөДЎЈИЛ№ӨҷzңyөД оӣrКЬПЮУЪІЩЧчИЛҶTөДЙнуw оӣrТФј°№ӨЧч о‘B(tЁӨi)ЎЈ
ЎЎЎЎФЪйL(chЁўng)•r(shЁӘ)йg,ҙу»ҜБҝөДЙъ®a(chЁЈn)ДЈКҪПВ,ИЛНхҷzңyХ№¬FіцБЛҳOҙуөДұЧ¶Л,НщНщУЙУЪИЛөДКиәц,Ң§ЦВІ»әПёсөД®a(chЁЈn)Ж·БчИләуАmөДЙъ®a(chЁЈn)јУ№ӨЯ^(guЁ°)іМ,б„іЙҳOҙуөДКВ№КЎЈФЪ®”З°өДЖыЬҮ(chЁҘ)РРҳI(yЁЁ)РО„ЭПВ,РРҳI(yЁЁ)РиЗуҢҰЗЙЬҮ(chЁҘ)БгІҝјюЩ|(zhЁ¬)БҝөДҷzңyМбіцБЛРВөДТӘЗуЎЈ°йлSЦш(zhЁҙ)Я@·NТӘЗу,ҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)ұ»ТэИлөҪЖыЬҮ(chЁҘ)БгІҝјюҷzңyЦРЎЈҷCЖчТ•УX(juЁҰ)ҷzңyјјРg(shЁҙ)КЗУГ№ӨҳI(yЁЁ)ПаҷCДЈ”MИЛөДПҫҫҰ,НЁЯ^(guЁ°)ҝШЦЖЖчҒн(lЁўi)Же”MИЛөДҙуДXҢҰПаҷCІЙјҜөҪҲDПсЯM(jЁ¬n)РРМҺАнІўАнҪв,ЧоҪKҢҚ(shЁӘ)¬FҢҰ®a(chЁЈn)Ж·іЯҙз»тХЯЖдЛыПа‘ӘЦёҳЛөДУӢЛг»тЕР”аҒн(lЁўi)НкіЙҢҰ®a(chЁЈn)Ж·өДҷzңyЎЈ
ЎЎЎЎФ“јјРg(shЁҙ)ҫЯУР·ЗҪУУ|ЎўҢҚ(shЁӘ)•r(shЁӘ)Ўўҫ«¶ИёЯЎўТФј°ұгУЪЧФ„У(dЁ°ng)»Ҝ№ЬАнөДМШьc(diЁЈn)ЎЈН¬•r(shЁӘ),Ф“јјРg(shЁҙ)ҳOҙуөШНЖ„У(dЁ°ng)БЛ№ӨҳI(yЁЁ)Йъ®a(chЁЈn)ДЈКҪҸД„Ъ„У(dЁ°ng)ГЬјҜПтјјРg(shЁҙ)ГЬјҜРНөДЮDЧғЎЈФ“Ц§“ОЗЙКЗЯBҪУЖыЬҮ(chЁҘ)УНҫЫәНЖыЬҮ(chЁҘ)УНПдөДІҝјю,Ф“ІҝјюөДЩ|(zhЁ¬)БҝЦұҪУкP(guЁЎn)ПөөҪЖыЬҮ(chЁҘ)УНПөөДК№УГРФДЬТФј°үЫГьЎЈФЪҢҰФ“ІҝјюөДХ{ІйЯ^(guЁ°)іМЦР°l(fЁЎ)¬F,ДҝЗ°ҢҰФ“ІҝјюөДҷzңyЯҖКЗWИЛ№ӨөД·ҪКҪҒн(lЁўi)ҷzңy,ҳOҙуөДУ°н‘БЛҷzңyөДңКҙ_¶ИәНЛЩ¶ИЎЈХгҪӯДіЖыЬҮ(chЁҘ)БгІҝјю№«Лҫҡ°МмЙъ®a(chЁЈn)7Иf(wЁӨn)ёщЧуУТөДЦ§“О—U,ХјҮшИвКРҲц(chЁЈng)·Эо~өД80%ЧуУТЎЈ‘ӘФ“ГҙЛҫөДСыХҲ,Н¬•r(shЁӘ)нҳ‘Ә®”ПВЙъ®a(chЁЈn)ҷzңyРиЗуөДЪ…„Э,ОТӮғСРҫҝІўй_(kЁЎi)°l(fЁЎ)БЛ»щУЪҷCЖчТ•УX(juЁҰ)өДЖыЬҮ(chЁҘ)УНҫЫЦ§“ОКгіЯҙзҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪy,ПЈНыДЬМоСaҢҰЯ@Т»ІҝјюЧФ„У(dЁ°ng)»ҜҷzңyөДҝХ°Ч,МбёЯҷzңyөДҫ«¶ИәНЛЩ¶ИЎЈ
ЎЎЎЎҷCЖчТ•УX(juЁҰ)ФЪҮшНв°l(fЁЎ)Х№ұИЭ^СёЛЩ,ДҝЗ°ТСҪӣ(jЁ©ng)ҸV·әөД‘ӘУГөҪёчӮҖ(gЁЁ)оI(lЁ«ng)Ут,Из®a(chЁЈn)Ж·іЯҙзөДҷzңyЎў№ӨјюұнГжөДИұПЭWј°ОпјюөДЧR„eөИ,Я@Р©ҢҰ‘ӘөДҷzңyПөҪyМбёЯБЛҷzңyҢҰПуөДҫ«¶ИWј°Йъ®a(chЁЈn)Р§ВКЎЈҡWГАЎўИХұҫөИҮшјТФЪҷCЖчТ•УX(juЁҰ)оI(lЁ«ng)УтМҺУЪҮшлHоI(lЁ«ng)ПИөШО»,ЖдӮҺУГТІұИЭ^іЙКм[6]ЎЈҮшНвөДҙуҢW(xuЁҰ)»ҜЭ^ФзөДіЙБўБЛПа‘ӘөДҢҚ(shЁӘ)тһЦПУГҒн(lЁўi)ЯM(jЁ¬n)РРјјРg(shЁҙ)СРҫҝWј°‘ӘҢҰ№ӨҳI(yЁЁ)Йъ®a(chЁЈn)РиЗуЎЈФЪЖыЬҮ(chЁҘ)БгІҝјюҷzңy·ҪГж,НЁУГЖыЬҮ(chЁҘ)№«ЛҫәЬФзөДСРҫҝй_(kЁЎi)°l(fЁЎ)БЛЖыЬҮ(chЁҘ)БгІҝјюөДТ•УX(juЁҰ)ҷzңyПөҪyЎЈTalorәНGregoryСРҫҝК№УГДЈ°е·ЁҢҰЖыЬҮ(chЁҘ)ЦЖ„У(dЁ°ng)БгјюЯM(jЁ¬n)РРңyБҝУўҮшөДБ_жЪЗЙЬҮ(chЁҘ)ГҙЛҫСРҫҝй_(kЁЎi)°l(fЁЎ)БЛҢҰЖыЬҮ(chЁҘ)ЭҶ№ИіЯҙзөДТ•УX(juЁҰ)ҷzңyПөҪyЎЈФЪҮшНвҢҰТ•УX(juЁҰ)ҷzңyјјРg(shЁҙ)СРҫҝұИЭ^іЙ№ҰөДҷCЖчТ•УX(juЁҰ)№«ЛҫУР;CognexЎўNIөИЎЈ
ЎЎЎЎФЪҮшғИ,ҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)ЖрІҪұИЭ^НнЎЈлSЦш(zhЁҙ)№ӨҳI(yЁЁ)Йъ®a(chЁЈn)өДРиЗу,ҮшғИөДЧЈЖчТ•УX(juЁҰ)№«ЛҫТІЦрқuөДҸДЧой_(kЁЎi)КјҙъАнҮшНвЖ·ЕЖТ•УX(juЁҰ)№«ЛҫөҪӘҡБўЧФЦчСРҫҝЎўЙъ®a(chЁЈn)һйЦчҢ§өД№«Лҫ,АэИзҙуәгЎўҫSТ•ЎўәЈҝөНюТ•өИ,ФЪіэБЛМṩӲјю(ИзНхҳI(yЁЁ)ПаҷC)Ц®Нв,ТІПа‘ӘөДМṩХыМЧ»тХЯІҝ·ЦөДҷCЖчТ•УX(juЁҰ)ҷzңyОГРg(shЁҙ)өДҪвӣQ·ҪсҪЎЈҮшғИёЯРЈФЪҷCЖчТ•УX(juЁҰ)оI(lЁ«ng)УтТІУРЦш(zhЁҙ)Па‘ӘөДСРҫҝЎЈкҗҪЁҝЙөИИЛНЁЯ^(guЁ°)ҢӨХТЭҶ№ИҲAІ®әНДЈ°еЖҘЕдөД·Ҫ·ЁҢҰЭҶ№ИЯM(jЁ¬n)РРЧR„eЎЈМKҪЁөИИЛНЁЯ^(guЁ°)ІКэ”ҲDПс·ЦёојјРg(shЁҙ)СРҫҝй_(kЁЎi)°l(fЁЎ)БЛҢҰЖыЬҮ(chЁҘ)ХыЬҮ(chЁҘ)іЯҙзөДңyБҝWЎЈ
ЎЎЎЎ…–•ФпwөИИЛСРҫҝй_(kЁЎi)°l(fЁЎ)БЛ»щУЪLabVIEWөДЖыЬҮ(chЁҘ)БгІҝјюИұПЭҷzңyПөҪyЎЈҫCЙП,ДҝЗ°ҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)јәҪӣ(jЁ©ng)ФЪёчРРёчҳI(yЁЁ)өГөҪЭ^ҙуөДСРҫҝЕc‘ӘУГ,ФЪЖыЬҮ(chЁҘ)БгІҝјюөДҷzңy·ҪсҪТІУРәЬ¶аСРҫҝЎЈТ•УX(juЁҰ)ңyБҝјјРg(shЁҙ)КЗҢЩУЪҷCЖчТ•УX(juЁҰ)јјРg(shЁҙ)ЦРөДТ»·N,КЗҢҰҙэҷzңyДҝҳЛөДО»ЦГЎўіЯҙзЎў»тЖдЯ\„У(dЁ°ng) о‘B(tЁӨi)өИЯM(jЁ¬n)РРҫ«ҙ_ңyБҝөДТ»ҝЪјјРg(shЁҙ)ЎЈ°ҙХХ№вХХ·ҪКҪ,Т•УX(juЁҰ)ңyБҝҝЙW·ЦһйЦч„У(dЁ°ng)Т•УX(juЁҰ)ңyБҝәНұ»„У(dЁ°ng)Т•УX(juЁҰ)ңyБҝЎЈ°ҙХХПаҷCөД”өДҝ,Т•УX(juЁҰ)ңyБҝУЦҝЙТФ·ЦһйҶОДҝТ•УX(juЁҰ)ңyБҝЎўлpДҝТ•УX(juЁҰ)ңyБҝәН¶аДҝТ•УX(juЁҰ)ңyБҝЎЈ
ЎЎЎЎФЪТ•УX(juЁҰ)ңyБҝЦР,Ҫӣ(jЁ©ng)іЈ•ю(huЁ¬ )ҝј‘]ңyБҝІВ¶ИҶ–(wЁЁn)о},ұҠЛщЦЬЦӘ,ҲDПсІЙјҜФOӮдөД·ЦұжВКФҪёЯ,ҶОО»О»ЦГДҝҳЛОпуwҢҰ‘ӘөДҸНЛШФҪ#,ҸД¶шңyБҝҫ«¶ИФҪёЯЎЈө«УІјюөДМбЙэРиТӘәЬёЯөДіЙұҫ,ЛщИЛӮғҢўДҝҳЛЮDПтБЛ»щУЪҒҶПсУHөДңyЦБјјРg(shЁҙ)ЎЈ
ЎЎЎЎЖыЬҮ(chЁҘ)УНұГЦ§“О—UіЯҙзҢҚ(shЁӘ)•r(shЁӘ)ҷzңyПөҪyФOУӢЈә
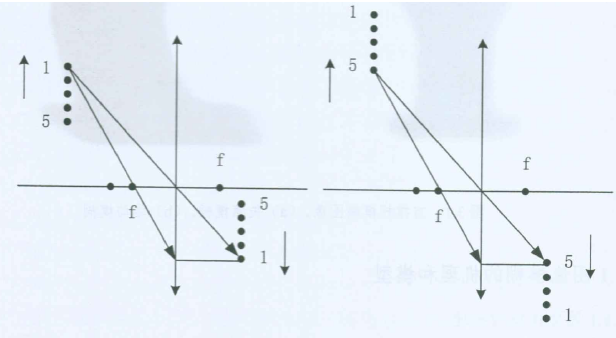
Я\„У(dЁ°ng)ДЈәэ
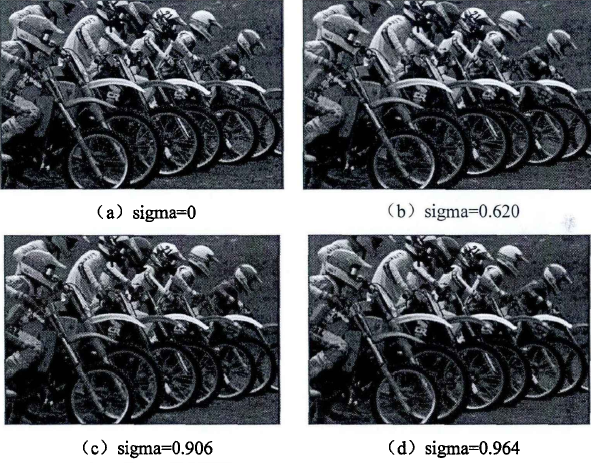
bikesҲDПс
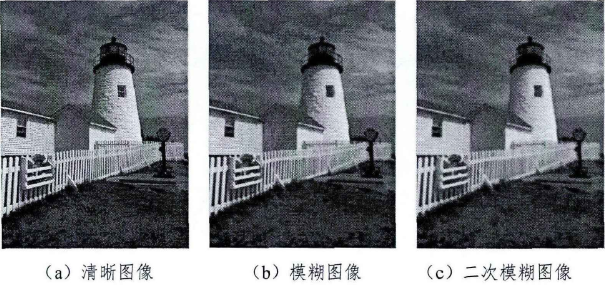
¶юҙОДЈәэР§№ыҲD
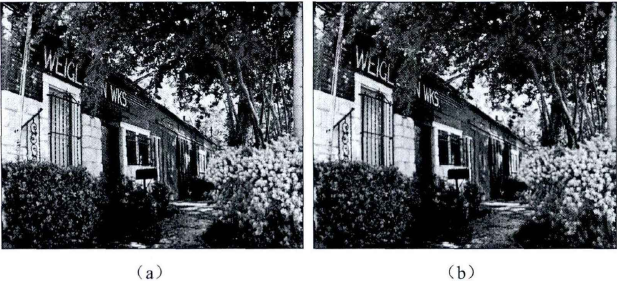
building2ҲDПс
Ц§“О—UФЪҷzңyЯ^(guЁ°)іМЦРіЙПсҲD
Дҝдӣ
ЎЎЎЎХӘТӘ
ЎЎЎЎAbstract
ЎЎЎЎөЪ1ХВ ҫwХ“
ЎЎЎЎЎЎЎЎ1.1 Хnо}ұіҫ°ј°СРҫҝТвБx
ЎЎЎЎЎЎЎЎ1.2 ҷCЖчТ•УX(juЁҰ)№КРg(shЁҙ)ФЪЖыЬҮ(chЁҘ)БгІҝјюҷzңyЦРөД‘ӘУГ¬F о
ЎЎЎЎЎЎЎЎ1.3 ҲDПсЗеОъ¶ИФu»ҜСРҫҝ¬F о
ЎЎЎЎЎЎЎЎЎЎЎЎ1.3.1 ҲDПсЩ|(zhЁ¬)БҝөДЦчУ^(guЁЎn)Фuғr(jiЁӨ)·Ҫ·Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ1.3.2 ҲDПсЩ|(zhЁ¬)БҝөДҝНУ^(guЁЎn)Фuғr(jiЁӨ)·Ҫ·Ё
ЎЎЎЎЎЎЎЎ1.4 ұҫОДСРҫҝЗЙИЭј°ХВ№қ°ІЕЕ
ЎЎЎЎЎЎЎЎЎЎЎЎ1.4.1 ұҫОДСРҫҝ?jЁ¬)ИИ?br />
ЎЎЎЎЎЎЎЎЎЎЎЎ1.4.2 ұҫОДХВ№қ°ІЕЕ
ЎЎЎЎөЪ2ХВ ҷCЖчТ•УX(juЁҰ)ҷzңyПөҪyФӯАнәНҝӮуwФOУӢ
ЎЎЎЎЎЎЎЎ2.1 Ц§“О—UөДЦчТӘҷzңyЦёҳЛ
ЎЎЎЎЎЎЎЎ2.2 ҷCЖчТ•УX(juЁҰ)ҷzңyПөҪyөД№ӨЧчФӯАн
ЎЎЎЎЎЎЎЎ2.3 Т•УX(juЁҰ)ПөҪyөДУІјюјЬҳӢФOУӢ
ЎЎЎЎЎЎЎЎЎЎЎЎ2.3.1 №вФҙҶОФӘЖеүK
ЎЎЎЎЎЎЎЎЎЎЎЎ2.3.2 А§ПсІЙјҜДЈүK
ЎЎЎЎЎЎЎЎ2.4 Т•УX(juЁҰ)ҷzңyПөҪyөДЬӣјюФOУӢ
ЎЎЎЎЎЎЎЎ2.5 ұҫХВРЎҪY
ЎЎЎЎөЪ3ХВ ҲDПсЗеОъ¶ИФuғr(jiЁӨ)СРҫҝ
ЎЎЎЎЎЎЎЎ3.1 ҲDПсЖеәэөДҷCАнәНДЈРН
ЎЎЎЎЎЎЎЎЎЎЎЎ3.1.1 БфУыЖеәэөДҷCАн
ЎЎЎЎЎЎЎЎЎЎЎЎ3.1.2 ҲDПсҳгәэөДЖеРН
ЎЎЎЎЎЎЎЎ3.2 »щУЪҲDПсМЭ¶ИөДЗеОъ¶ИФuғr(jiЁӨ)Лг·Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.1 ҮъПсЎ©Оъ¶ИЕcҲDҫүМЭ¶ИкP(guЁЎn)ПөСРҫҝ
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.2 »щУЪМЭ¶ИҮъПсЗЙОъ¶ИФuғr(jiЁӨ)“дРН
ЎЎЎЎЎЎЎЎ3.3 »щУЪ¶юҙОЖеәэҹo(wЁІ)…ўҝјөДҲDУаЗеОъ¶ИФuғr(jiЁӨ)Лг·Ё(NRFSIM)
ЎЎЎЎЎЎЎЎЎЎЎЎ3.3.1 FSIMИ«…ўҝјҲDПсЩ|(zhЁ¬)БҝФuғr(jiЁӨ)Лг·Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ3.3.2 »щУЪ¶юҙОДЈәэөДҲDПсЗеОъ¶ИФuғr(jiЁӨ)·Ҫ·Ё
ЎЎЎЎЎЎЎЎ3.4 ҢҚ(shЁӘ)тһ·ВХжЕc·ЦОц
ЎЎЎЎЎЎЎЎЎЎЎЎ3.4.1 ЗеОъ¶ИФuғr(jiЁӨ)Лг·ЁөДФuғr(jiЁӨ)ЦёҳЛ
ЎЎЎЎЎЎЎЎЎЎЎЎ3.4.2 Лг·ЁФuғr(jiЁӨ)ЦёҳЛөДтһЧC
ЎЎЎЎЎЎЎЎ3.5 ұҫХВРЎҪY
ЎЎЎЎөЪ4ХВ »щУЪҒҶПсЛШөДЦ§“ОичҺЧәОіЯҙзңyБҝ
ЎЎЎЎЎЎЎЎ4.1 ҒҶПсЛШЯ…ҫүҷzңy»щұҫФӯАн
ЎЎЎЎЎЎЎЎ4.2 »щУЪ”MәП·ЁөДҒҶПсЛШЯ…ҫүҷzңy
ЎЎЎЎЎЎЎЎЎЎЎЎ4.2.1 Я…ҫүҷM¶И·ҪПтҙ_¶Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ4.2.2 ¶юҙОЗъҫҖ(xiЁӨn)”MәП
ЎЎЎЎЎЎЎЎЎЎЎЎ4.2.3 ҒҶПсЛШЯ…ҫүьc(diЁЈn)ЧшҳЛУӢЛг
ЎЎЎЎЎЎЎЎ4.3 Ц§“О—UіЯҙзңyБҝ
ЎЎЎЎЎЎЎЎЎЎЎЎ4.3.1 ңyБҝЛг·Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ4.3.2 Ц§іЦ—UЦёҳЛңyБҝ
ЎЎЎЎЎЎЎЎ4.4 ПаҷCҳЛ¶Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ4.4.1 КАҪзЧшҳЛПөЕcПаҷCЧшҳЛПөЮD“Q
ЎЎЎЎЎЎЎЎЎЎЎЎ4.4.2 ҲDПсЧшҳЛПөәНПаҷCЧшҳЛПөЮD“Q
ЎЎЎЎЎЎЎЎЎЎЎЎ4.4.3 ҲDПсЧшҳЛПөЕcКАҪзЧшҳЛПөЮD“Q
ЎЎЎЎЎЎЎЎЎЎЎЎ4.4.4 ПаҷCҳЛ¶ЁБчіМ
ЎЎЎЎЎЎЎЎ4.5 ұҫХВРЎҪY
ЎЎЎЎөЪ5ХВ ПөҪy‘ӘУГЕcңyФҮ
ЎЎЎЎЎЎЎЎ5.1 Ц§“О—UҷzңyПөҪyНхҳI(yЁЁ)ФOӮд
ЎЎЎЎЎЎЎЎ5.2 ЬӣјюФOУӢЕc‘ӘУГ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.2.1 ІўРРЬӣјюФOУӢ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.2.2 ЬӣјюЖӨУГ
ЎЎЎЎЎЎЎЎ5.3 ¬FҲц(chЁЈng)ҢҚ(shЁӘ)ңyҪY№ыЕc”ө“ю·ЦОц
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.1 ¬FҲц(chЁЈng)ҢҚ(shЁӘ)ңyҪY№ы
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.2 ¬FҲц(chЁЈng)”ө“ю·ЦОц
ЎЎЎЎЎЎЎЎ5.4 ұҫХВРЎҪY
ЎЎЎЎөЪ6ХВ ҝӮҪYЕcХ№Ны
ЎЎЎЎЎЎЎЎ6.1 ҝӮҪY
ЎЎЎЎЎЎЎЎ6.2 Х№Ны
ЎЎЎЎ…ўҝјОД«I
ЎЎЎЎЦВЦx
ЎЎЎЎӮҖ(gЁЁ)ИЛәҶ(jiЁЈn)ҡv
ЈЁИзДъРиТӘІйҝҙұҫЖӘ®…ҳI(yЁЁ)ФOУӢИ«ОДЈ¬ХҲДъВ“(liЁўn)ПөҝН·юЛчИЎЈ©