24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
懸架系統是車(chē)輛重要組成部分,其性能好壞直接影響到車(chē)輛行駛平順性、通過(guò)性以及操縱穩定性。特種車(chē)輛對懸架系統有著(zhù)更高的性能需求,尤其是應急救援車(chē)輛有時(shí)需要在行進(jìn)中作業(yè),對保持車(chē)身位姿平穩有著(zhù)特殊要求,傳統懸架系統難以達到這個(gè)目標。主動(dòng)懸架可以實(shí)時(shí)控制車(chē)身位姿,使車(chē)身成為一個(gè)慣性穩定平臺以完成上述情況對車(chē)身位姿穩定控制的要求。
本文結合國家重點(diǎn)研發(fā)項目“高機動(dòng)應急救援車(chē)輛(含消防車(chē)輛)專(zhuān)用底盤(pán)及懸掛關(guān)鍵技術(shù)研究”(項目編號:2016YFC0802902)和吉林省汽車(chē)產(chǎn)業(yè)發(fā)展專(zhuān)項資金項目“轎車(chē)慣性調控主動(dòng)懸架研制開(kāi)發(fā)”(項目編號:20112330),聚焦特種應急救援車(chē)輛行進(jìn)中需要保持車(chē)身位姿平穩的問(wèn)題,主要對主動(dòng)懸架系統作動(dòng)器的伺服控制和車(chē)身姿態(tài)穩定自抗擾控制進(jìn)行系統深入的研究,主要研究工作如下:
(1) 建立了基于非對稱(chēng)液壓缸作動(dòng)器的 1/4 主動(dòng)懸架非線(xiàn)性模型,針對不同工況建立了閥控非對稱(chēng)缸非線(xiàn)性模型。通過(guò)對彈簧和減振器非線(xiàn)性環(huán)節的分析,建立了 1/4 主動(dòng)懸架非線(xiàn)性模型。根據多組實(shí)驗數據,通過(guò)參數辨識獲得相對準確的模型參數。
(2) 設計了主動(dòng)懸架系統作動(dòng)器的伺服控制器。根據分數階微積分定義和分數階系統原理,以 Oustaloup 近似法針對辨識后的作動(dòng)器模型設計了分數階 PID伺服控制器。提出了并行自適應克隆選擇算法用于分數階 PID 參數整定。
(3) 設計了主動(dòng)懸架系統車(chē)身姿態(tài)穩定自抗擾控制器。根據自抗擾控制器特性,通過(guò)設計虛擬控制量的方法解決了車(chē)身姿態(tài)穩定控制系統的多輸入多輸出耦合問(wèn)題,對解耦后的垂向位移、俯仰角和側傾角三個(gè)控制通道分別設計了位移-速度(或角度-角速度)雙環(huán)自抗擾控制器。通過(guò)仿真驗證了該控制算法的解耦效果和位姿穩定性控制效果。
(4) 對主動(dòng)懸架作動(dòng)器位移輸出飽和的問(wèn)題進(jìn)行了研究。針對路面沖擊造成的作動(dòng)器位移輸出飽和,在分析該問(wèn)題傳統處理方法的基礎上設計了虛擬限位塊控制策略。針對坡路起伏造成的作動(dòng)器位移輸出飽和,提出了估計坡路包絡(luò )線(xiàn)方法,分別對垂向穩定控制器和俯仰穩定控制器進(jìn)行改進(jìn)。通過(guò)仿真分析驗證了所提出改進(jìn)方法的有效性。
(5) 基于一汽集團“奔騰”牌轎車(chē)懸架制作了主動(dòng)懸架試驗樣車(chē),并進(jìn)行了車(chē)身位姿穩定控制的路面試驗。以脈沖輸入路面和起伏障礙路面兩種路面輸入作為實(shí)驗條件,應用本文提出的位移-速度(或角度-角速度)雙環(huán)自抗擾解耦控制器,對主動(dòng)懸架試驗樣車(chē)進(jìn)行了越障試驗,并通過(guò)比較同一試驗樣車(chē)的被動(dòng)懸架越障試驗結果,驗證了雙環(huán)自抗擾解耦控制器的控制效果。
關(guān)鍵詞:主動(dòng)懸架 位姿穩定控制 自抗擾解耦控制 分數 PID 控制 克隆選擇算法
Abstract
The suspension is one of the important assembly of a vehicle, and its performance has a direct impact on ride comfort and handling stability.Special vehicles have higher performance requirement on suspension systems, especially emergency rescue vehicles need to operate while moving sometimes, which have special requirement on stability of the vehicle attitude. It is hard to achieve the target for conventional suspension system. Active suspension system could control the vehicle attitude in real-time, so that the vehicle body becomes an inertial stabilization platform to satisfy the situation on the vehicle attitude stabilization control requirements.
This dissertation is funded by National Key Technologies R&D Program “Key Technology Research on Special Chassis and Suspension for High-mobility Emergency Rescue Vehicle (Including Fire Fighting Vehicle)” (Project Number: 2016YFC0802902) and the Special funds of Automobile Industry in Jilin Province for the project “Research and Development of Inertial Control Technology for Car Active Suspension” (Project Number: 20112330). The methods to keep stability of the vehicle attitude for special vehicles are conducted research in depth, a servo controller for active suspension actuator and a set of active disturbance rejection controllers (ADRC) for the vehicle attitude stability control are designed, the main work is as follows:
(1) The dynamic model of valve controlled asymmetric hydraulic cylinder and the nonlinear model of 1/4 active suspension are built. The dynamic model of valve controlled asymmetric hydraulic cylinder is built on different working conditions. The nonlinear model of 1/4 active suspension is built with nonlinear parts of spring and shock absorber. Then, the relative accurate model parameters are obtained by the method of parameter identification with multiple experimental data.
(2) A servo controller for active suspension actuator is designed. According to definition of fractional order calculus and theory of fractional order system, an Oustaloup recursive approximation (ORA) fractional order PID (FOPID) controller is designed as the servo controller for active suspension actuator. Then,the parallel adaptive clonal selection algorithm (PACSA) is proposed to tuning the FOPID parameters.
(3) A set of ADRC for the vehicle attitude stability control is designed. The problem of multi-input multi-output (MIMO) coupling of vehicle attitude stability control system is solved by setting virtual control variables, according to the features of ADRC. And the displacement-velocity (or angle-angular velocity) dual-loop ADRC is designed for decoupled vertical, pitching and rolling control channels. Then the decoupling effects of this control method and the vehicle attitude stability control performance are verified by simulation research.
(4) The problem of displacement output saturation of active suspension actuator is studied. In order to solve the problem of actuator displacement output saturation caused by the impact of road surface, the control strategy of virtual limit block is designed on the basis of analyzing the traditional processing method of the problem. In order to solve the problem of actuator displacement output saturation caused by rise and fall of the slope road, a method is proposed to estimate slope envelope, the improvements of the vertical stability controller and pitch stabilization controller are designed respectively based on the method.The effectiveness of the proposed method is verified by simulation analysis for two conditions of actuator displacement output saturation.
(5) The prototype of active suspension vehicle is built based on the suspension of FAW “Besturn” car, the road experiments are carried out to verify the vehicle attitude control. With the experimental conditions of pulse input road and uneven terrain, the performance of vehicle attitude control using displacement-velocity (or angle-angular velocity) dual-loop decoupling ADRC which proposed in this dissertation is verified and compared with the passive suspension set of the same vehicle.
Keywords: active suspension, attitude stability control, active disturbance rejection control, fractional order PID controller, clonal selection algorithm.
車(chē)輛懸架系統將車(chē)身與車(chē)輪彈性連接,起到支撐車(chē)身、隔離振動(dòng)并保證車(chē)輪持續接地等作用,是車(chē)輛重要組成部分。懸架性能好壞直接影響到車(chē)輛行駛的舒適性和安全性,因此車(chē)輛懸架一直是車(chē)輛工程的主要研究領(lǐng)域之一。隨著(zhù)人們對車(chē)輛行駛性能的追求,對車(chē)輛隔振能力的要求也逐漸提高。懸架的主動(dòng)隔振技術(shù)在近年來(lái)得到了廣泛關(guān)注和深入研究,一些研究成果也在汽車(chē)產(chǎn)業(yè)中得到了應用。
汽車(chē)的普及加快了工業(yè)化進(jìn)程和產(chǎn)業(yè)結構優(yōu)化,并推動(dòng)了生產(chǎn)方式的變遷和生產(chǎn)率的提高[1]。隨著(zhù)汽車(chē)在各行各業(yè)的廣泛應用,不同領(lǐng)域多樣化的需求不斷給汽車(chē)產(chǎn)業(yè)和車(chē)輛工程技術(shù)帶來(lái)新的挑戰。特種車(chē)輛對懸架系統有著(zhù)特定的性能需求,尤其是一些應急救援車(chē)輛有時(shí)為了提高救援效率,需要在行進(jìn)中實(shí)施救援作業(yè),要求懸架系統能夠在車(chē)輛行駛中保持車(chē)身位姿穩定。這需要懸架系統具備實(shí)時(shí)調節車(chē)身位姿的功能,傳統懸架系統難以達到這個(gè)目標。主動(dòng)懸架可以實(shí)時(shí)控制車(chē)身位姿,使車(chē)身成為一個(gè)慣性穩定平臺以完成上述情況對車(chē)身位姿穩定控制的要求。
本文結合國家重點(diǎn)研發(fā)項目“高機動(dòng)應急救援車(chē)輛(含消防車(chē)輛)專(zhuān)用底盤(pán)及懸掛關(guān)鍵技術(shù)研究”(項目編號:2016YFC0802902)和吉林省汽車(chē)產(chǎn)業(yè)發(fā)展專(zhuān)項資金項目“轎車(chē)慣性調控主動(dòng)懸架研制開(kāi)發(fā)”(項目編號:20112330),主要針對高機動(dòng)應急救援車(chē)輛行進(jìn)中車(chē)身位姿穩定性控制問(wèn)題,通過(guò)分數階 PID 控制方法和自抗擾控制方法分別對主動(dòng)懸架系統的電液伺服作動(dòng)器控制和車(chē)身位姿穩定控制開(kāi)展研究,并針對主動(dòng)懸架作動(dòng)器位移輸出飽和提出改進(jìn)方案。
主動(dòng)懸架思想早在上世紀 70 年代就已經(jīng)提出,但由于種種原因,時(shí)至今日仍然沒(méi)有在量產(chǎn)車(chē)中得到廣泛的應用。本節結合汽車(chē)懸架系統的分類(lèi)及主動(dòng)懸架系統的發(fā)展對汽車(chē)主動(dòng)懸架系統研究現狀進(jìn)行綜述。
車(chē)輛懸架是連接車(chē)身和車(chē)輪的機械裝置,主要由彈簧、減振器、主動(dòng)懸架作動(dòng)器以及導向機構等組成[2]。車(chē)輛的懸架系統能夠緩沖、吸收由路面不平引起的車(chē)身振動(dòng),同時(shí)能夠傳遞車(chē)輪與路面之間的驅動(dòng)力和制動(dòng)力,當車(chē)輛行駛的工況發(fā)生改變時(shí),懸架系統也能夠承受各個(gè)方向上產(chǎn)生的慣性力。性能良好的懸架系統可以使車(chē)輛在復雜路面環(huán)境下仍能保持良好的工作狀態(tài),在保證車(chē)輛行駛平順性和安全性的同時(shí)使車(chē)輛保持理想的行駛速度[3]。車(chē)輛懸架系統主要分為被動(dòng)懸架,主動(dòng)懸架和半主動(dòng)懸架三種基本類(lèi)型[4]。
被動(dòng)懸架由支撐車(chē)身并抵抗沖擊的彈簧,吸收振動(dòng)的減振器和限制懸架運動(dòng)的導向機構組成,在參數設計合理的前提下可以有效吸收地面沖擊。圖車(chē)輛的實(shí)際工況復雜多變,若實(shí)際工況偏離設計工況越大,則被動(dòng)懸架的效果越差。一般在汽車(chē)設計之初就把汽車(chē)定型為運動(dòng)型、舒適型、越野型等不同產(chǎn)品,因此汽車(chē)懸架的設計就是一個(gè)折中妥協(xié)的過(guò)程。主動(dòng)懸架則是在被動(dòng)懸架的基礎上增加了作動(dòng)器來(lái)提供額外能量輸入,安裝于車(chē)身的傳感器實(shí)時(shí)采集車(chē)輛行駛信息,根據路況的不同實(shí)時(shí)調節作動(dòng)器輸入能量大小,使車(chē)輛的懸架系統滿(mǎn)足不同工況要求。但主動(dòng)懸架能耗高,成本高,并沒(méi)有廣泛應用于成本敏感的民用車(chē)型中。能夠實(shí)時(shí)調節懸架減振器阻尼或彈簧剛度而不向懸架系統輸入額外能量的半主動(dòng)懸架成為了懸架研究的另一個(gè)熱點(diǎn)。半主動(dòng)懸架相比主動(dòng)懸架有能耗低的優(yōu)勢,且半主動(dòng)懸架能夠達到半波近似主動(dòng)懸架的控制規律[5],成本和能耗的降低為半主動(dòng)懸架的普及奠定了基礎。
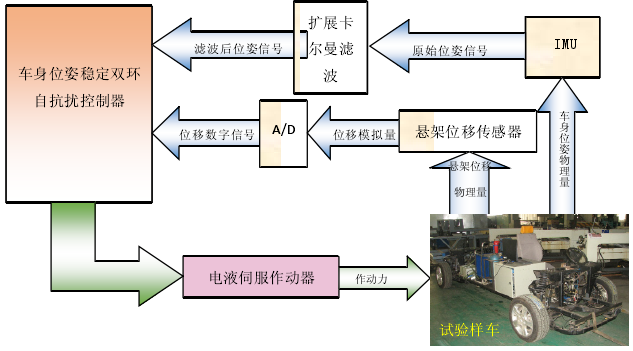
電液伺服主動(dòng)懸架的車(chē)身位姿穩定系統:

主動(dòng)懸架試驗樣車(chē)

雙橫臂獨立懸架總成

車(chē)架三維圖
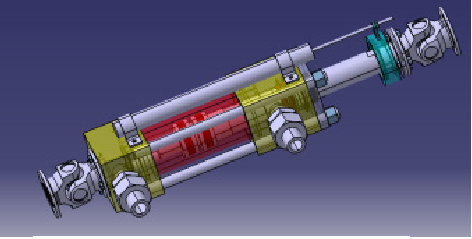
液壓缸三維圖
主動(dòng)懸架控制系統外層控制器(車(chē)身位姿穩定控制)結構
目 錄
摘 要
Abstract
目 錄
第 1 章 緒論
1.1 研究背景
1.2 汽車(chē)主動(dòng)懸架系統研究現狀
1.2.1 汽車(chē)懸架系統概述
1.2.1.1 汽車(chē)懸架系統分類(lèi)
1.2.1.2 主動(dòng)懸架發(fā)展過(guò)程
1.2.2 主動(dòng)懸架控制技術(shù)研究現狀
1.3 位姿穩定控制研究現狀
1.3.1 車(chē)身位姿穩定控制研究現狀
1.3.2 其它典型穩定控制研究現狀
1.3.2.1 云臺穩定控制研究現狀
1.3.2.2 坦克主炮穩定器研究現狀
1.4 相關(guān)研究中存在的主要問(wèn)題
1.5 本文主要研究?jì)热?br />
1.6 論文章節安排
第 2 章 基于并行自適應克隆選擇算法的懸架作動(dòng)器分數階控制
2.1 引言
2.2 懸架及作動(dòng)器建模
2.2.1 動(dòng)力學(xué)模型推導
2.2.1.1 四分之一懸架系統建模
2.2.1.2 作動(dòng)器建模
2.2.2 模型辨識
2.2.2.1 待辨識參數
2.2.2.2 辨識方法
2.2.2.3 模型驗證
2.3 作動(dòng)器的伺服控制器設計
2.3.1 分數階 PID 控制器設計
2.3.1.1 分數階微積分及分數階 PID 控制器
2.3.1.2 分數階 PID 控制的 Oustaloup 近似
2.3.2 并行自適應克隆選擇算法
2.3.2.1 基本概念
2.3.2.2 關(guān)鍵算子
2.3.2.3 算法流程
2.4 主動(dòng)懸架作動(dòng)器仿真分析
2.4.1 控制器參數整定
2.4.2 分數階 PID 控制器跟蹤效果分析
本章小結
第 3 章 基于雙環(huán)自抗擾解耦技術(shù)的車(chē)身位姿穩定控制研究
3.1 引言
3.2 整車(chē)模型的建立與解耦
3.2.1 整車(chē) 7 自由度主動(dòng)懸架系統建模
3.2.2 車(chē)身控制解耦
3.3 自抗擾控制器簡(jiǎn)介
3.3.1 跟蹤微分器
3.3.2 擴張狀態(tài)觀(guān)測器
3.3.3 非線(xiàn)性控制律
3.4 車(chē)身垂向穩定控制器的設計
3.4.1 速度環(huán)控制器設計
3.4.2 位移環(huán)控制器設計
3.4.3 車(chē)身垂向穩定雙環(huán)自抗擾控制器的整合
3.5 車(chē)身俯仰側傾姿態(tài)穩定控制器設計
3.5.1 角速度環(huán)控制器設計
3.5.2 角度環(huán)控制器設計
3.5.3 車(chē)身姿態(tài)穩定雙環(huán)自抗擾控制器的整合
3.6 車(chē)身位姿穩定控制的仿真分析
3.6.1 四輪相關(guān)路面輸入建模
3.6.2 整車(chē)主動(dòng)懸架系統的仿真模型設計
3.6.3 仿真結果及分析
3.6.3.1 自抗擾控制器的解耦效果分析
3.6.3.2 車(chē)身位姿穩定控制效果分析
本章小結
第 4 章 作動(dòng)器位移輸出飽和問(wèn)題的改進(jìn)
4.1 引言
4.2 路面沖擊造成作動(dòng)器位移輸出飽和的改進(jìn)
4.2.1 懸架行程超限問(wèn)題的傳統處理方法分析
4.2.2 虛擬限位塊控制策略
4.2.3 虛擬限位塊在車(chē)身位姿穩定控制中的應用
4.3 坡路起伏造成作動(dòng)器位移輸出飽和的改進(jìn)
4.3.1 垂向穩定控制器的改進(jìn)
4.3.2 俯仰穩定控制器的改進(jìn)
4.3.3 改進(jìn)后控制效果分析
本章小結
第 5 章 試驗樣車(chē)的制作與實(shí)車(chē)試驗
5.1 引言
5.2 試驗樣車(chē)的設計與制作
5.2.1 機械與液壓系統
5.2.2 電氣與控制系統
5.3 試驗結果
5.3.1 脈沖輸入試驗
5.3.2 通過(guò)起伏障礙路面試驗
本章小結
第 6 章 結論與展望
6.1 本文完成的主要工作
6.2 今后工作展望
參考文獻
作者簡(jiǎn)介及在學(xué)期間所取得的科研成果
致謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)