24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
內圓切片技術(shù)是硅晶圓加工領(lǐng)域的主流技術(shù)之一,國內內圓切片主要通過(guò)單臺機器配合工人人工上下料進(jìn)行生產(chǎn),自動(dòng)化水平較低,越來(lái)越不能滿(mǎn)足當今行業(yè)快速增長(cháng)的對硅晶圓片的需求。基于當前內圓切片生產(chǎn)的現狀,本文以提高內圓切片生產(chǎn)的自動(dòng)化水平為主要目的,進(jìn)行了如下研究工作: .
(1)針對當前內圓切片生產(chǎn)自動(dòng)化水平較低的問(wèn)題,經(jīng)過(guò)研究論證后設計了--種全新的內圓切片生產(chǎn)形式:將原有的內圓切片機進(jìn)行自動(dòng)化改造,將改造后的內圓切片單元并聯(lián)成機組,配合為其設計的自動(dòng)上下料機械手系統形成種全自動(dòng)切片生產(chǎn)的全新生產(chǎn)形式。
(2)明確了整個(gè)機械手系統所要完成的工作,根據機械手系統的功能要求確定機械手的坐標形式,并對機械手各軸的傳動(dòng)方案進(jìn)行了設計,根據確定的各軸傳動(dòng)方案進(jìn)行了其機械結構設計,最終將設計完成的各軸結構進(jìn)行整合,從而完成了整個(gè)機械手系統結構。
(3)以PLC為控制核心進(jìn)行了機械手系統的控制程序的設計,并在VS2017環(huán)境下利用MFC進(jìn)行了上位機界面程序的編寫(xiě),通過(guò)后續的調試與改進(jìn),最終實(shí)現了機械手系統的自動(dòng)控制。
本課題設計的全新內圓切片生產(chǎn)形式以及設計完成的自動(dòng)上下料機械手系統能夠大大提高內圓切片生產(chǎn)的自動(dòng)化水平,研究成果具有很好的實(shí)際應用前景。
關(guān)鍵詞:內圓切片:自動(dòng)上下料:機械手;結構設計:自動(dòng)控制

Abstract
Inner circle slicing technology is one of the mainstream technologies in the field of silicon wafer processing. Domestic inner circular slices are produced mainly by single machine cooperating with workers' manual feeding and unloading, it's low level of automation is increasingly unable to meet the rapidly growing demand for silicon wafers in today's industry. Based on the current situation of the production of inner circle slices, the research was carried out as follows aims at improving the automation level of the production of inner circle slices.
(1) In view of the low level of automation in the production of inner circle slices, a new production mode of inner circle slices was designed: The automation transformation was carried out on the original inner circle slicing machine. then the reformed inner circle slicing unit was connected into a assembling unit to produce cooperate with the automatic feeding and unloading manipulator system designed for it.
(2) The work of the whole manipulator system was clearly defined, the coordinate form of the manipulator was determined according to the functional requirements of the manipulator system, and the transmission schemes of the axes of the manipulator were designed. The mechanical structures of the axes were designed according to the determined transmission schemes. Finally, the overall structure design of the whole manipulator system was completed by Integrate the structure of each axis.
(3) The control program of the manipulator system was designed with PLC as the control core, and the upper computer interface program is compiled with MFC under VS2015 environment. Through subsequent debugging and improvement, the automatic control of the manipulator system was finally realized. The new production form of inner circle slice and the designed automatic feeding and unloading manipulator system can greatly improve the automation level of inner circle slice production, and the research results have good practical application prospects.
Keywords: Inner circular slice; Automatic feeding and unloading; Manipulator ;Structural design; Automatic control
目錄
第1章緒論
1.1課題研究背景
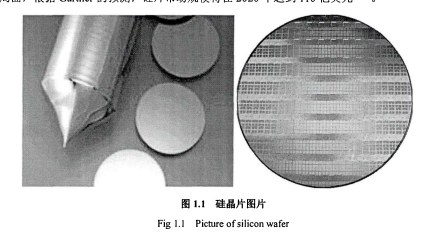
硅晶圓片是占比最大的IC制造材料,約占制造成本的三分之一左右,目前90%以上的芯片和傳感器是基于半導體單晶硅片制成,近幾年全球半導體硅片都是供不應求的局面,根據Gartner的預測,硅片市場(chǎng)規模將在2020年達到110億美元21.
硅晶圓片加工最早使用的技術(shù)是外圓切片技術(shù),但是外圓刀片剛性差,因此切割過(guò)程中刀口的擺動(dòng)量難以控制。當采用加厚刀體的方法增加刀片剛度時(shí),切割刀縫就會(huì )變得很寬,這就會(huì )極大地浪費被切材料,不僅切割質(zhì)量較差,硅晶圓片的厚度也比較大,因此外圓切片技術(shù)很早就被內圓切片技術(shù)所取代。內圓切片技術(shù)描述如下:主軸帶動(dòng)內圓刃口作高速旋轉運動(dòng),硅晶圓棒延內圓刃口徑向運動(dòng)進(jìn)行進(jìn)給,以此實(shí)現對硅晶圓的切片加工。內圓切片技術(shù)所使用的內圓刀片穩定性好,通過(guò)張緊能夠使很薄的刀片獲得較高的剛性,因此其與游離磨料線(xiàn)鋸切片技術(shù)一樣都是半導體材料切割領(lǐng)域關(guān)鍵且應用最為廣泛的技術(shù)。與外圓切片技術(shù)相比,內圓切片技術(shù)以其切割損耗小、切割精度高、因切割加工而產(chǎn)生的變質(zhì)層少、切割速度快、生產(chǎn)效率高等特點(diǎn)和優(yōu)勢取代了外圓切片技術(shù),在半導體材料切割設備領(lǐng)域中占據著(zhù)重要的地位。
國內現有內圓切片機主要是通過(guò)單臺機器配合人工上下料進(jìn)行切片生產(chǎn),生產(chǎn)過(guò)程不僅工人勞動(dòng)強度較大,且浪費了大量人工成本,整體生產(chǎn)的自動(dòng)化水平較低。工業(yè)與科學(xué)技術(shù)日新月異的進(jìn)步使得當今工業(yè)生產(chǎn)的自動(dòng)化水平越來(lái)越高,機器取代人工實(shí)現全社會(huì )工業(yè)生產(chǎn)的全自動(dòng)化也成為了當前的必然趨勢I6,因此,提高現有內圓切片生產(chǎn)模式的自動(dòng)化水平和生產(chǎn)效率也成為了必然的選擇。

自動(dòng)上下料一直是自動(dòng)化生產(chǎn)領(lǐng)域的研究熱點(diǎn)。在很多生產(chǎn)形式中,需要給設備進(jìn)行周期性的上料和下料,如數控加工中心以及使用產(chǎn)線(xiàn)進(jìn)行大批量生產(chǎn)的工廠(chǎng)。在這種生產(chǎn)形式中若采用人工上下料的方式,工人的勞動(dòng)強度將會(huì )很大,且整個(gè)工作過(guò)程相當的機械與枯燥,尤其是在設備進(jìn)行生產(chǎn)的過(guò)程中需要工人進(jìn)行上料操作時(shí),危險性將會(huì )很高。在這些生產(chǎn)形式中采用人工進(jìn)行上下料的弊端十分突出,因此在這些生產(chǎn)場(chǎng)合中用機械手自動(dòng)上料來(lái)完成整個(gè)生產(chǎn)過(guò)程最為合適。國內由于受制于前期投入的不足以及技術(shù)等方面的限制,使得國內工廠(chǎng)中給設備進(jìn)行上下料的工作大多數仍然由人工完成,因此很多企業(yè)在生產(chǎn)過(guò)程中存在著(zhù)生產(chǎn)效率低、精度低、工人的勞動(dòng)強度大,操作者有發(fā)生安全事故的隱惠等- - 系列問(wèn)題718.
與人工上下料相比,采用機械手上下料具有如下突出的優(yōu)點(diǎn):
(1)自動(dòng)上下料機械手裝置動(dòng)作靈敏、運動(dòng)慣性小。通用性強、精度高,可以長(cháng)時(shí)間連續作業(yè)011,(2)采用機械手系統進(jìn)行上下料操作,不僅可以使工業(yè)生產(chǎn)的自動(dòng)化水平大大提高,同時(shí)也能夠提高生產(chǎn)效率,在減輕了工人勞動(dòng)強度的同時(shí)為企業(yè)節省了大量人工成本。
機械手系統上下料過(guò)程統-規范, 能夠保證產(chǎn)品的-致性,保證了產(chǎn)晶質(zhì)量穩定的同時(shí)提高了企業(yè)的生產(chǎn)力加1.
(3)與人工上下料相比,機械手自動(dòng)上下料更能夠適應惡劣的工作環(huán)境,例如在熱處理、鍛造等一些加工環(huán)境中,長(cháng)時(shí)間工作不僅會(huì )使工人身心疲憊,甚至嚴重影響工人的身體健康。在這些環(huán)境中使用不知疲勞、不怕危險的機械手進(jìn)行上下料操作能夠很好地解決這些問(wèn)題。
從以上的分析中可以看出利用機械手進(jìn)行自動(dòng)上下料優(yōu)點(diǎn)突出,而且其取代人工上下料也是一種必然的趨勢。
本課題基于原有內圓切片機提出了內圓切片機組配合機械手系統全自動(dòng)生產(chǎn)的概念,結合先進(jìn)控制理論實(shí)現整個(gè)機組的全自動(dòng)精確控制,設計出一種自動(dòng)化水平更高,整體生產(chǎn)布局更為符合智能制造新理念的全自動(dòng)內圓切片生產(chǎn)機組。與原有內圓切片機相比,該全自動(dòng)內圓切片生產(chǎn)機組具有的優(yōu)點(diǎn)主要為:
改人工上下料為機械手自動(dòng)上下料,自動(dòng)化水平大大提高:極大地減少了內圓切片生產(chǎn)過(guò)程的人工成本,生產(chǎn)過(guò)程更為安全,生產(chǎn)效率更高:生產(chǎn)布局更為合理。
整個(gè)設計方案完全為原創(chuàng )性設計,在內圓切片加工領(lǐng)域是-一個(gè)創(chuàng )新。此設計對于改善內圓切片生產(chǎn)加工的自動(dòng)化程度、提高生產(chǎn)效率、減少工人勞動(dòng)強度等方面都有著(zhù)極為重要的意義。
1.2內圓切片機的國 內外研究現狀
國外切片技術(shù)成熟于上世紀七十年代末,到八十年代中期,大部分切片機的加工單晶直徑都達到了125mm(5 英寸)以上,瑞士的邁爾布格耶公司生產(chǎn)的臥式內圓切片機加工晶圓直徑最大可達304.8mm(12 英寸)。在八十年代中后期內圓切片技術(shù)相繼商品化。
1998年1月,日本旭日金剛石工業(yè)公司推出T-SM-300內圓切片機,標志著(zhù)內圓切割技術(shù)權上了一個(gè)新的臺階,從上世紀90年代末開(kāi)始,國外內圓切片技術(shù)的發(fā)展停滯了十余年14.
直到現在,全球比較有名的生產(chǎn)內圓切片機的廠(chǎng)家包括:日本Tokyo Semitsu 株式會(huì )社,其代表機型為T(mén)SK系列機:瑞士的Meyer-BurgerAG公司,其代表機型為T(mén)S系列機:日本Disco株式會(huì )社,其代表機型為DVD系列機;德國GN公司,其代表機型為IDS系列機;美國STC 公司,其代表機型為STC系列機,美國Kayex公司,其代表機型為DS系列機。這些廠(chǎng)商以西歐的TS系列為代表和以東亞的TSK系列為代表形成了世界切片機生產(chǎn)的兩大陣容。從結構形式上內圓切片機主要分為臥式和立式兩種形式,其中臥式內圓切片機主要由美國和瑞士所生產(chǎn),英國。法國、西德和日本所生產(chǎn)的內圓切片機主要為立式結構。臥式內圓切片機的單晶棒料安裝方式為水平安裝,刀片的旋轉運動(dòng)則發(fā)生在豎直平面內。立式內圓切片機的棒料則為垂直安裝,刀片在水平平面內旋轉實(shí)現物料切割。目前全球內圓切片機的市場(chǎng)份額大部分都被臥式結構的機型所占據。而從內圓切片機國際市場(chǎng)分布來(lái)看,美國的公司基本主宰了其本土市場(chǎng),瑞士的切片機則遠銷(xiāo)世界各地、英國公司的產(chǎn)品已逐漸撤出美國市場(chǎng)轉向歐洲,東京精密生產(chǎn)的內圓切片機占據著(zhù)日本的市場(chǎng)、全球剩余市場(chǎng)則由美國、瑞士公司所支配159.
國內早在1964年時(shí)就已經(jīng)開(kāi)始了內圓切片機的生產(chǎn),但僅有上海無(wú)專(zhuān)廠(chǎng)和西北機器廠(chǎng)兩個(gè)生產(chǎn)廠(chǎng)家,此兩個(gè)廠(chǎng)家最開(kāi)始均以日本東京精密公司生產(chǎn)的切片機為原型進(jìn)行仿制并生產(chǎn)出自己的機型。那時(shí)內圓切片機就已經(jīng)全部實(shí)現了國產(chǎn)化,并且整機的水平對比日本廠(chǎng)家生產(chǎn)的機型毫不遜色。后來(lái)由于歷史原因,此后的十年時(shí)間國內內圓切片機的生產(chǎn)水平停滯不前。而這時(shí)期國外已經(jīng)開(kāi)發(fā)出了加工晶圓直徑達4寸的成套設備,國內與國外技術(shù)水平的差距被不斷拉大。
從七十年代末到八十年代中期,半導體專(zhuān)用設備銷(xiāo)售市場(chǎng)疲軟,在這--時(shí)期國內引進(jìn)了大量的國外先進(jìn)切片生產(chǎn)設備,但是在引進(jìn)先進(jìn)設備時(shí)缺乏對本國專(zhuān)業(yè)設備制造業(yè)進(jìn)行保護致使國內內圓切片機的制造水平更新緩慢,對比于國外落后了2~3個(gè)更新周期。
當時(shí)洛陽(yáng)單晶硅廠(chǎng)'靠大量引進(jìn)國外先進(jìn)內圓切片機作為主要生產(chǎn)裝備,一躍成為國內最先進(jìn)的塑硅材料生產(chǎn)廠(chǎng)家。
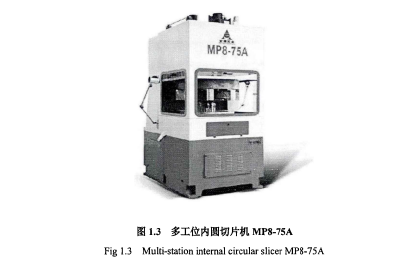
此后一直到本世紀初后的幾年,國內專(zhuān)注于研制內圓切片機的仍然僅有信息產(chǎn)業(yè)部電子第四十五研究所以及少數的個(gè)人廠(chǎng)家。雖然這- -時(shí)期國內生產(chǎn)的內圓切片機所能加工的硅晶圓切片的直徑范圍覆蓋了從φ50到0200mm,但是其技術(shù)水平僅相當于國外九十年代初期的水平,此后國內出現了加工效率更高的多工位內圓切片機1].其實(shí)物如圖1所示。
1.3機械手系統國內外研究現狀
機械手的發(fā)展始于上世紀50年代,直到今天已經(jīng)成為一-種廣為人知的科技含量較高的自動(dòng)生產(chǎn)機械。機械手臂通過(guò)各關(guān)節之間的相互配合模仿人手臂的運動(dòng)功能,并通過(guò)運動(dòng)控制程序中的運動(dòng)規則完成物件的抓取、搬運以及對工具的操作。機械手的出現極大地促進(jìn)了工業(yè)生產(chǎn)自動(dòng)化和機械化水平的提高,將工人從重復、繁重的勞動(dòng)中解放了出來(lái),是人類(lèi)自動(dòng)化研究過(guò)程中的一個(gè)里程碑171)。如今,機械手裝置被廣泛應用于工業(yè)自動(dòng)化生產(chǎn)的各個(gè)場(chǎng)合中,隨著(zhù)人們對其研究的不斷深入,機械手靈活性大大提高,對比人工生產(chǎn)其所具有的能循環(huán)重復工作而不知疲倦、惡劣工作環(huán)境中不怕危險,穩定性高、抓舉載荷力量比人手大、工作環(huán)境應用范圍廣等一系列特點(diǎn), 使其在各行各業(yè)生產(chǎn)中的關(guān)注度越來(lái)越高,應用也越來(lái)越廣泛191.
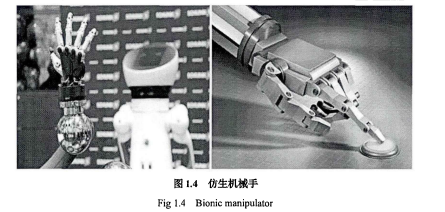
機械手首先是從美國開(kāi)始研制的,第-臺機械手于1958 年誕生于美國聯(lián)合控制公司,其結構較為簡(jiǎn)單,主體結構僅包括機體以及安裝在機體上的一個(gè)回轉長(cháng)臂,手部抓取機構通過(guò)安裝于長(cháng)臂頂部的電磁塊實(shí)現對工件的抓取,并采用示教型的控制系統進(jìn)行控制。1962年,在第- -臺機械手方案的基礎上,美國聯(lián)合控制公司又完成了名為Unimate(即萬(wàn)能自動(dòng))機械手的試制,其采用數控示教再現型控制系統進(jìn)行控制。整個(gè)機械手的運動(dòng)系統類(lèi)似于坦克炮塔,由液壓驅動(dòng)機械手臂的伸縮、俯仰以及回轉,并且利用磁鼓作為整個(gè)控制系統的存儲裝置,此款機械手是后續球坐標機械手的發(fā)展基礎。同年,另一款名為Vewrsatran的機械手也由美國機械制造公司試制成功,該款機械手的中央立柱可以實(shí)現升降以及回轉運動(dòng),其同樣采用示教再現型控制系統進(jìn)行控制。此后全球機械手的發(fā)展均以此兩款機械手作為基礎。1962 年,美國AMF公司研制生產(chǎn)出了全球首個(gè)名為"尤曼特"機器人,是工業(yè)機器人領(lǐng)城最早的原型機器人之一121.1965年,全球首臺能夠通過(guò)機器視覺(jué)技術(shù)識別物體且能夠實(shí)現位置辨識的機器人在美國麻省理工學(xué)院研制成功21.1978年, - -種名為Unimate-Vicarm的能將裝配作業(yè)精度誤差降低到+1毫米的工業(yè)機械手被美國麻省理工學(xué)院、斯坦福大學(xué)以及Unimate 公司聯(lián)合研制成功,其控制系統是一臺小型電子計算機。同一時(shí)期,德國KuKa公司研制成功了一種采用關(guān)節式結構進(jìn)行控制的點(diǎn)焊機械手。80年代,加州大學(xué)伯克利的羅伯特教授以螳螂在崎嶇表面的運動(dòng)特征為原型研制出了一個(gè)八條腿機器人,其腿部結構利用鉸鏈和彈簧進(jìn)行連接,該機器人可以在崎嶇路面上快速爬行。在此基礎上,多拉爾豪通過(guò)相同的思路研制成功了具備人手部分功能的機械手,并利用傳感器來(lái)模擬人手的觸覺(jué)感知功能。多拉爾豪的研究成果為機械手以及機器人學(xué)界的研究方向提供了一個(gè)新的思路,極大地促進(jìn)了現代工業(yè)機械手系統的發(fā)展。2005 年,日本的東京大學(xué)科研人員研制出了一種腱驅動(dòng)的假手,其由手腕及5個(gè)手指組成,每一根手指擁有3個(gè)關(guān)節,指間關(guān)節通過(guò)腱驅動(dòng)方式運動(dòng),肌關(guān)節通過(guò)電機驅動(dòng)2.2007年,英國David Gow研制出了- -種名為i-Limb的用于臨床恢復的仿生機械手2)。仿生機械手的研究是機械手發(fā)展的大趨勢。圖1.4為仿生機械手的結構。
我國于20世紀70年代開(kāi)始進(jìn)行工業(yè)機械手的研制。1972年,上海開(kāi)始研發(fā)出了第一臺機械手,隨后全國多個(gè)省份也相繼開(kāi)始了機械手的研發(fā)。七五計劃期間,我國開(kāi)始重視對機械手的研究與應用,并投入了大量資金,在此期間研究并加工制造出了一系列的工,業(yè)機械手,如北京機械自動(dòng)化研究所成功研制了噴涂機器人并成功應用于噴涂作業(yè)。
廣州機床研究所與北京機床研究所合作研制成功了點(diǎn)焊型機器人,大連機床研究所獨立設計研發(fā)出了氬弧焊機器人。這一時(shí)期機器人的控制系統基本上都是由北京科技大學(xué)機器人研究所與中國科學(xué)院沈陽(yáng)自動(dòng)化研究所聯(lián)合進(jìn)行開(kāi)發(fā)的。與此同時(shí),機器人系統中所使用的一-系列的關(guān)鍵部件如直流伺服電機,專(zhuān)用軸承,編碼器,減震齒輪等也被開(kāi)發(fā)了出來(lái)124.
我國主要研究工作大部分都集中在擴大機械手的應用范圍上,在研發(fā)專(zhuān)用機械手的同時(shí),也不斷進(jìn)行通用機械手的研制,并且取得了- -些列的成果,成功研制出了包括計算機控制機械手、示教再現型機械手、和組合式機械手在內的多種類(lèi)型機械手。我國的科研人員在機械手的研制過(guò)程中也不斷總結,將機械手各主要典型的運動(dòng)構件設計成為通用機構,從而能夠根據不同的工作內容選用不同功能的機構,裝配成滿(mǎn)足所需工作要求的專(zhuān)用機械手,使機械手的各主要零部件實(shí)現了通用,既方便了設計制造,又使設備的維護變得簡(jiǎn)單。
經(jīng)過(guò)近些年在機械手方面的研發(fā)投入,我國在機械手的應用工程方面已經(jīng)具備了一定的開(kāi)發(fā)制造能力,井培養出了-支了解社會(huì )需求,能夠根據實(shí)際工作條件研發(fā)出價(jià)格低廉,可與國外老牌公司生產(chǎn)的機械手競爭的機械手的研發(fā)隊伍25].
下圖為工業(yè)制造中常見(jiàn)的幾種機械手設備。

此外,隨著(zhù)工業(yè)自動(dòng)化的發(fā)展,輕質(zhì)材料被越來(lái)越多的應用于各種復雜機械系統的部件。上,因材料本身的性質(zhì)決定了部件變形將會(huì )對系統產(chǎn)生更大的影響。在此背景下,產(chǎn)生了一種新型的機械手-柔性機械手。柔性機械手與傳統的剛性移動(dòng)機械手相比,具有負裁重量比高、能耗低、生產(chǎn)成本低等優(yōu)點(diǎn)。柔性機械手的設計及研究已經(jīng)成為了國內外機械手研究領(lǐng)域的熱點(diǎn)2612].
1.4課題研究意義
迄今為止,國內內圓切片的生產(chǎn)形式- - 直是以單臺機器配合人工上下料進(jìn)行生產(chǎn),生產(chǎn)自動(dòng)化水平較低,工人勞動(dòng)強度較大,整個(gè)生產(chǎn)過(guò)程存在一-定的安全隱患。本課題研發(fā)出一種全新的內圓切片生產(chǎn)形式,即首先對原有小型內圓切片機進(jìn)行自動(dòng)化改造,并將改造后的內圓切片機并連成機組,結合自動(dòng)上下料的生產(chǎn)理念,配合為其配套設計的自動(dòng)上下料機械手系統完成內圓切片的全自動(dòng)化生產(chǎn),改變了原有內圓切片生產(chǎn)過(guò)程中機械、枯燥,而且還有一-定 的危險性的人工上下料生產(chǎn)形式的弊端,極大地提高了內圓切片的自動(dòng)化水平。整個(gè)內圓切片機組生產(chǎn)模式新穎,整體布局合理,功能原理先進(jìn),具有很好的應用前景。
1.5課題的研究?jì)热菁罢撐?總體結構
論文的主要研究?jì)热莺驼撐目傮w結構如下:
第1章:對課題的研究背景和意義進(jìn)行了詳細介紹,并介紹了內圓切片技術(shù)以及機。
械手系統的國內外發(fā)展現狀,引出了內圓切片生產(chǎn)的發(fā)展趨勢,突出了本研究的運用前景和意義。
第2章:以現有內圓切片生產(chǎn)的突出缺點(diǎn)為依據,對內圓切片機的自動(dòng)化改造方案。
以及整個(gè)內圓切片機組的布置方案進(jìn)行了設計,并敘述了自動(dòng)化改造過(guò)程中的重點(diǎn)改造部分。
第3章:完成了機械手整體結構形式選擇以及各軸傳動(dòng)方案設計,然后對各軸傳動(dòng)方案進(jìn)行整合并完成了其結構設計,并對因機械手結構變形引起的運動(dòng)定位精度誤差及消除方式進(jìn)行了分析,最后對機械手系統中的關(guān)鍵零部件進(jìn)行了選型計算。
第4章:完成了機械手系統控制系統的設計,包括控制系統硬件選擇、傳感器布局、控制程序各模塊功能設計及實(shí)現,以及上位機界面程序開(kāi)發(fā)設計等內容。
第5章完成了機械手控制系統軟硬件系統的搭建,在完成控制系統。上下位機通訊的同時(shí)對控制程序的功能實(shí)現進(jìn)行了調試。
第6章:總結整個(gè)研究所做出的工作成果,并對后續工作的完善進(jìn)行了展望。

第2章內圓切片機自動(dòng)化改造及機組整體方案設計
2.1全新內圓切片機組方案論證
2.1.1針對現有內圓切片機各缺點(diǎn)的解決方案研.
2.1.2新機組方案研究設計
2.2新機組各系統組成及功能分析與研究
2.3主要結構與自動(dòng)化改造研究
2.3.1切片機工作單元改造設計研究
2.3.2刀架系統改造方案研究
2.4本章小結
第3章上下料機械手系統設計
3.1上下料機械手總體方案設計
3.1.1上下料機械手工作環(huán)境
3.1.2上下料機械手系統總體要求
3.1.3內圓切片機組組成及設備布局
3.2.上下料機械手方案設計
3.2.1機械手系統本體結構設計方案,
3.2.3機械手各軸傳動(dòng)方案設計
3.3.上下料機械手主要結構設計
3.3.1旋轉軸結構設計
3.3.2水平軸結構設計
3.33垂直軸結構設計
3.3.4移動(dòng)軸結構設計
3.3.5驅動(dòng)軸結構設計
3.3.6承料架及料倉結構設計
3.3.7機械手爪結構設計
3.3.8機械手系統整體結構
3.4主要結構形變對機械手系統運動(dòng)精度的影響分析
3.4.1支架頂板形變分析
3.4.2承載架形變分析
3.4.3料倉支架形變分析
3.4.4因構件形變引起的定位運動(dòng)誤差消除方式分析
3.5.上下料機械手關(guān)鍵零部件計算,
3.5.1機械手各軸關(guān)鍵參數確定
3.5.2夾緊氣缸選型
3.5.3锿珠絲桿選型
3.6本章小結
第4章機械手控制系統設計
4.1機械手控制系統整體組成
4.2機械手控制系統硬件設計
4.2.1機械手系統傳感器布置方案
4.2.2控制器介紹及選型
4.2.3步進(jìn)電機介紹及選型
4.3機械手系統PLC控制程序設計
43.1PLC控制程序組成
4.3.2初始化程序設計
4.3.3運動(dòng)模式選擇程序設計
4.3.4原點(diǎn)回歸程序設計
4.3.5手動(dòng)控制程序設計
4.3.6自動(dòng)控制程序設計
4.4控制系統上位機界面開(kāi)發(fā)
4.4.1界面程序主體結構設計
4.4.2界面程序各模塊功能實(shí)現
4.5本章小結
第5章控制系統搭建及調試
5.1控制系統描建
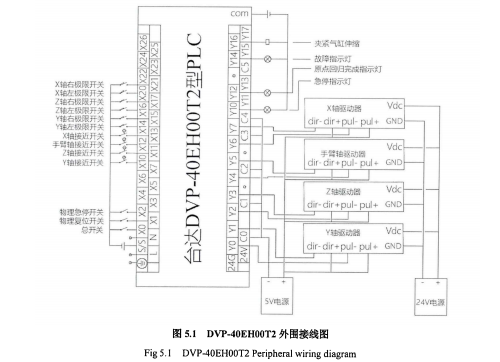
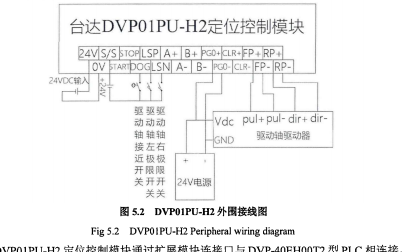
5.1.1控劊系統接線(xiàn)
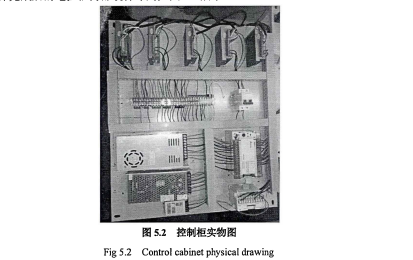
5.1.2控制柜設計
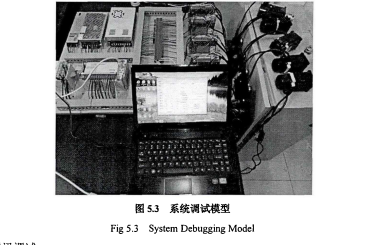
5.2系統調
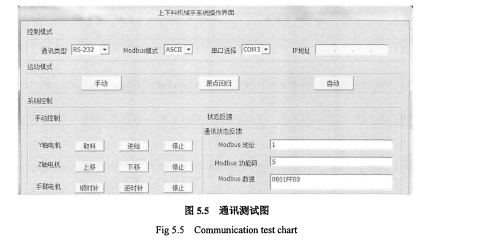
5.2.1通訊調試
5.2.2程序功能實(shí)現調試
第6章總結與展望
6.1研究總結
內圓切片機是半導體加工行業(yè)的關(guān)鍵設備,在硅晶圓加工領(lǐng)域占據著(zhù)重要地位。國內的內圓切片主要以單臺機器配合人工上下料進(jìn)行生產(chǎn),自動(dòng)化水平較低,在IC產(chǎn)業(yè)飛速發(fā)展,對硅晶圓片需求越來(lái)越大的今天,這種生產(chǎn)形式越來(lái)越不能滿(mǎn)足社會(huì )對硅品圓片的需求。針對這-行業(yè)現狀,本文以?xún)葓A切片生產(chǎn)的突出缺點(diǎn)為出發(fā)點(diǎn),對國內現在廣泛使用的小型內圓切片機進(jìn)行了自動(dòng)化改造,并將改造后的內圓切片單元井聯(lián)成機組,為整個(gè)機組設計了自動(dòng)上下料機械手系統,實(shí)現了機械手系統的自動(dòng)控制,設計完成的內圓切片機組及其自動(dòng)上下料機械手配合生產(chǎn),最終極大地提高了內圓切片生產(chǎn)的自動(dòng)化水平,并具有良好的應用前景。
本文的主要研究成果總結如下:
(1)針對現有內圓切片生產(chǎn)形式自動(dòng)化水平較低的缺點(diǎn),對現有的內圓切片機進(jìn)行了自動(dòng)化改造,提出了一種全新的內圓切片生產(chǎn)形式:即將改造后的內圓切片機并聯(lián)成機組,然后配合為其設計的自動(dòng)上下料機械手系統進(jìn)行全自動(dòng)化內圓切片生產(chǎn)。最終,確定了內圓切片機組整體布置方案及整個(gè)切片生產(chǎn)形式的系統組成,明確了各個(gè)機械系統所需要完成的工作。
(2)在明確了機械手系統所要實(shí)現的主要功能的基礎上,根據功能需求確定了機械手系統的結構形式和結構組成,完成了機械手系統各軸傳動(dòng)方案的研究與設計,根據設計的各軸傳動(dòng)方案進(jìn)行了各軸傳動(dòng)的結構實(shí)現,同時(shí)在對料倉的上下料方式設計的基礎。上完成了料倉部分結構的設計,最終將設計完成的各軸傳動(dòng)結構以及料倉結構進(jìn)行整合,完成了整個(gè)上下料機械手系統的結構設計,并對因機械手結構變形引起的運動(dòng)定位精度誤差及消除方式進(jìn)行了分析,最后對機械手系統中主要零部件進(jìn)行了選型與校核計算。
(3)根據整個(gè)機械手系統所要完成的功能對整個(gè)系統的運動(dòng)形式進(jìn)行了具體分析與規劃,根據規劃好的運動(dòng)流程最終完成了系統各個(gè)運動(dòng)模式下控制程序的編寫(xiě)。同時(shí)根據控制程序的具體功能完成了機械手控制系統上位機界面程序的編寫(xiě),并對上位機界面中各控制模塊的功能進(jìn)行了實(shí)現。
(4)在明確了控制系統硬件組成的基礎上完成了整個(gè)控制系統的搭建,實(shí)現了上位機與PLC的通訊,通過(guò)后續的調試修改了控制程序以及界面程序的不足,最終實(shí)現了機械手系統的自動(dòng)控制,為后續實(shí)際生產(chǎn)中控制系統的實(shí)現和調試提供了理論基礎。
6.2展望
本次研究設計了一種自動(dòng)上下料機械手配合內圓切片單元的全新內圓切片生產(chǎn)形式,并完成了機械手系統的總體結構設計,實(shí)現了機械手系統的自動(dòng)控制,極大地提高了內圓切片生產(chǎn)的自動(dòng)化水平。但因個(gè)人水平和時(shí)間的局限,整個(gè)研究仍有-些不足之處,需要后續進(jìn)行補充和完善:
1、整個(gè)機械手系統完成了整體結構設計以及零部件的結構設計,并在SolidWorks中進(jìn)行了虛擬裝配,后續還將進(jìn)行樣機的加工與調試,以驗證系統實(shí)際應用過(guò)程中的協(xié)調性和可靠性。
2.在實(shí)驗室中對整個(gè)控制系統進(jìn)行了調試,并對控制程序和上位機界面的不足之處進(jìn)行了修改,整個(gè)控制系統后續還需要進(jìn)行現場(chǎng)工作調試,以驗證整個(gè)控制系統在實(shí)際工作中的穩定性。后續現場(chǎng)調試時(shí)還需根據整個(gè)控制程序的實(shí)際運行情況對其進(jìn)行進(jìn)一步的修改和完善。
參考文獻
[1]陳平。全球硅 晶圓片的產(chǎn)業(yè)狀況分析[J].集成電路應用。2017,(3); 15-24.
2] 何超,王英民,李斌,徐偉,郝唯佑,siC晶片加工技術(shù)現狀與趨勢[].電子工業(yè)專(zhuān)用設備。2016,(6): 1-6, 54.
[3] 余世超。多片內圓切片機的研究[D]. 上海:華東理工大學(xué)碩士學(xué)位論文,2010.
[4] W.I.Clark,AJ.Shih,C. W.Hardin,et al.Fixed abrasive diamond wire machining-partI:process monitoring and wire tension force[J].International Jourmal of MachineTools&Manufacture,2003,43:523-532.
[5] 朱華炳,張希杰,宋孝炳。不銹鋼薄板鏡面拋光自動(dòng)化生產(chǎn)線(xiàn)上下料系統的開(kāi)發(fā)設計[].機械設計與制造,201311): 204-206.
[6] Qinxia Dong, Renhe Ma. et al.Thinking and Practice of Building Itelligent Factoryand Realizing Machine Replacing People[]. Kitting Industries.2015,(No.2): 42-45.
[7] 肖艷軍,李磊,周婧。基于PLC的自動(dòng)續料機械手[J].機槭設計與制造,2011,(2): 152~ 154.
[8]胡典傳。 上下料機械手的設計、軌跡規劃與控制研究[D].江蘇:江蘇大學(xué)碩士學(xué)位論文,2012
[9] Dianyong Yu. Application of manipulator based on PLC and touch screencontrol[J]. Manufacturing Automation, 2009, 31(2): 121~123.
[10]孫學(xué)儉,于國輝。世界機器人產(chǎn)業(yè)發(fā)展特點(diǎn)分析0.機器人技術(shù)與應用,2002,(3): 8~9.
[11] Jic Wan.Review of Knting Dyeing Machines on the 2016 China Intermational TextileMachinery Exhibition-ITMA Asia[J]. Knitting Industries.2016,(No.12): 32-39.
[12]王亮。 搬運機械手運動(dòng)控制的研究[D].山西:太原科技大學(xué)碩士學(xué)位論文, 2012.
[13]王戰中,張俊,季紅艷,趙賽,臧麗超。自動(dòng)上下料機械手運動(dòng)學(xué)分析及仿真[].機械設計與制造,2012, (5): 244~246.
[14]朱碧文硅片切割工藝與設備[門(mén)]才智2008,0(19);46-47.
[15] Y.Shiraishi, K. Takano, J. Matsubara. Growth of silicon crystal with a diameter of400mm and weight of 400kg []. Jourmnal ofCrystal Growth, 2001, 229: 17~21.
[16]靳永吉,我國切割設備的現狀與展望[J].電子工業(yè)專(zhuān)用設備202):11-13.
[17]肖南峰。智能機器人[M].廣州;華南理工大學(xué)出版社,2008.
[18]于殿勇,劉興義。基于PLC的工業(yè)機械手控制設計與組態(tài)監控[J].制造業(yè)自動(dòng)化,2011,33(18): 86~89.
[19] Design and Development In-Pipe Sewer Robot Based on Fuzzy LogicControl[J]Mechanical Engineering and Technology.2014: 18-25.
[20] Chao Yu, Minghe Jin, Hong LiuAn. Analytical solution for inverse kinematic of7-DOF redundant manipulators with offset-wrist[J]. IEEE, 2012, 8(5): 92~97.
[21] TORGNY B . Present and future robot control development--An industrialperspective[J]. Annual Reviews in Control, 2007, 31: 69~79.
[22] BERGAMASCO M,SCATTAREGGIA S M. The Mechanical Design of theMARCUS Prosthetic hand []. IEEE International Workshop on Robot and HumanCommunication [Z].0~ 7803~2904 ~x/95,1995: 356~372.
[23] ISHIKAWA Y, YU W,YOKOI H, et al. Development of Robot Hands with anAdjustable Power Transmitting Mechanism [D]. Itelligent Engineering SystemsThrough Neural Networks, 2000( 18):71~72.
[24]陳鯤。工業(yè)機械手在生產(chǎn)中的應用[J].中國科技縱橫,2010.(18)33[25]崔秦元,候約強機器人(碼垛機械手)發(fā)展的前景與應用[D.中國食品工業(yè)208,(10):47-48
[26] WenChenDynamic modelingof multi- -linkflexible roboticmanipulators[J]. Computers and Stmemres, 2001(9): 183~ 195. .
[27] Subudhi B, MorrisA S. Dynamic modeling, simulation and control of a manipulatorwith flexible link and joins[]. Robotics and Aumnomous Systems, 2002. 41: 257~270.
[28]李小賓,高志。全自動(dòng)內圓切片機組上下料機械手系統開(kāi)發(fā)[]組合機床與自動(dòng)化加工技術(shù),2019 (01): 94-96+100.
[29]朱駿移動(dòng)機器人操作機械手設計與分析[D].南京:南京理工大學(xué),2006[30]熊有倫,丁漢。機器人動(dòng)力學(xué)性能指標及其優(yōu)化[].機械工程學(xué)報,1989,25(2):9-14.
[31]石志新,羅玉峰,陳紅亮,等。機器人機構的全域性能指標研究[]機器人205,27():420-422.
[32]孫瓏,沖壓機上下料機械手的開(kāi)發(fā)與研究[D].廣州:華南理工大學(xué),2015.
[33]何芳,歐陽(yáng)云。基于圓柱坐標方式的小型機械手的PLC 控制系統[J]機電一體化,2003,9(1):47-49.
[34] Yeh S S, Hsu P L. Analysis and design of integrated control for multi-axis motionsystems[J]. Control Systems Technology, IEEE Transactions on, 2003, 11(3): 375-382.
[3]王勇。步進(jìn)電機與伺服電機的比較[].中小企業(yè)管理與技術(shù), 2010(34): 311-312.
[36] Renaud M. Geometric and kinematic models of a robot manipulator: calculation of theJacobian matrix and its inverse[C/Int. Symp, Industrial Robots, 1981: 453-465.
[37]高志,高雄。基于LabVIEW的新型金剛砂線(xiàn)切割設備的研發(fā)[J].機械設計與制造2018,(5): 194-196.
[38]范巍,范超毅,加工中心進(jìn)給交流伺服電機的選型與計算[].機電技術(shù)。2017.(4);48-50,53.
[39]任久帥,印刷電路板抓取機械手的設計與研究[PD].青 島:青島大學(xué),2018.
[40] Bugaighis, Tarek. Guidelines for Ball Screw Sclection []Mcdical DesignTechnology.2007.
[41]劉鴻文材料力學(xué)[M].高等教育出版社。2011, 290-303.
[42]劉燕,鄒萍,管文娟。基于PLC的三軸機械手控制系統的設計與實(shí)現[].制造業(yè)自動(dòng)化,2016(07): 21-24.
[43]韓以倫,朱倩,陳佩。基于PLC的管件自動(dòng)焊接系統設計[].制造業(yè)自動(dòng)化,2016(05): 72-75.
[44]中達電通、DVP-PLC 應用技術(shù)手冊[M].中達電通股份有限公司,2011.
[45] DSP Control System Design Based on Coin Sorting Packaging Machine[].DynamicalSysterms and Control,2016: 61-69.
[46]陳浩,劉振全,王漢芝。編程技術(shù)及應用案例M].化學(xué)工業(yè)出版社,2014.
[47] Yongqi Ma. OBJECT-ORIENTED Finite Element Analysis and Programming In VC ++ [0]. Applied Mathematics and Mchanics2002,(No.12); 1437-1443.
[48] WAGO Corp. Modbus-based PLCs [].Plant Engineering2015, Vol.69(No.4): 66.
[49] Olivier Hersent David Boswarthick, Omar Elloumi. Modbus[J].EngineeredSystems.005,(No.3)
[50] 李英,陳傳凱,蘇貞志。基于LabVIEW與PLC的開(kāi)放式數控系統串口無(wú)線(xiàn)通訊的研究[J].組合機床與自動(dòng)化加工技術(shù), 2012 (07): 49-53.
[51]中達電通。臺達DVP系列PLC通訊協(xié)議[M].中達電通股份有限公司,2013.
致謝
忙碌的研究生生活已接近尾聲,在課題論文即將截稿之際,我想借此機會(huì )向在學(xué)習期間幫助過(guò)我的老師和同學(xué)致上最真誠的感謝。
首先要感謝的人就是我的導師高志教授,從研究生生涯初始階段-直到現在論文即將截稿之際,高老師都給予了我無(wú)私的關(guān)心和幫助,無(wú)論是其在科學(xué)研究中專(zhuān)注負責的態(tài)度,還是對學(xué)生傾注心血的無(wú)私教導和培養,都對我的生活和學(xué)習態(tài)度產(chǎn)生了深刻的影響,使我受益良多。
其次,我要感謝實(shí)騎室同窗。以及我的室友們在學(xué)習和生活中給子我的支持和鼓勵,因為有你們,我的研究生生活變得豐富多彩。
最后我要感謝我的父母多年以來(lái)對我默默的付出,是你們的愛(ài)和支持讓我能夠一直走到今天。在今后的生活中,我會(huì )繼續努力,不辜負你們的期望。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)