24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
’™ “™
°°°°ÎS÷¯(zh®¥)»´«Ú –àˆ(ch®£ng)Ωõ(j®©ng)ù˙µƒøÏÀŸΩ®‘O∫Õ∞l(f®°)’π£¨Œ“ᯜΓ™‘⁄á¯ÎH –àˆ(ch®£ng)÷–’ºì˛∑ðÓ~£¨–Ë“™¥Ÿ ππ§òI(y®®)∆ÛòI(y®®)þM(j®¨n)––∏ƒ∏Ô°£ûÈ¡À÷∏þŒ“á¯π§òI(y®®)∆ÛòI(y®®)µƒ÷«ƒÐªØ∫Õ◊‘Ñ”(d®∞ng)ªØ∞l(f®°)’πþM(j®¨n)≥㨌“á¯∆ÛòI(y®®)–Ë“™·ò嶨F”–µƒπ§òI(y®®)ôC–µ ÷∞l(f®°)’π¨FÝÓþM(j®¨n)––—–æø£¨·òå¶Üñ(w®®n)Ó}£¨Ã·≥ˆø∆åW(xu®¶)µƒ°¢∫œþmµƒ÷«ƒÐÇ}ɶ∞·þ\ôC–µ ÷‘O”ã∑Ω∑®£¨“‘¥ÀÅÌ(l®¢i)÷∏þÿõŒÔþ\ðî°¢∞·þ\µƒ π”√–߬ °£
°°°°ôC–µ ÷æÕ≥…ûÈ¡ÀÆî«∞∆ÛòI(y®®)åç(sh®™)¨F◊‘Ñ”(d®∞ng)ªØ°¢÷«ƒÐªØ∏ƒ∏Ôµƒ÷˜“™ÕæèΩ°£‘⁄»ÀÇɵƒ»’≥£…˙ªÓ÷–£¨ôC–µ ÷≥ˆ¨F‘⁄∏˜ÇÄ(g®®)ÓI(l®´ng)”Ú∑∂á˙É»£¨≤¢∞l(f®°)ì]≥ˆ¡À÷ÿ“™µƒ◊˜”√°£
°°°°±æŒƒûÈ¡À÷∆∂®≥ˆ∏¸º”ø∆åW(xu®¶)°¢÷«ƒÐµƒôC–µ ÷£¨≤ÈÈÜ¡Àá¯É»Õ‚œýÍP(gu®°n)Œƒ´IŸY¡œ£¨å¶á¯É»Õ‚œýÍP(gu®°n)π§òI(y®®)ôC–µ∞l(f®°)’π¨FÝÓþM(j®¨n)––¡À∑÷Œˆ∫ÕøÇΩY£¨≤¢å¶ôC–µ ÷µƒþ\Ñ”(d®∞ng)åW(xu®¶)÷™◊RþM(j®¨n)––—–æø£¨å¶ôC–µ ÷µƒþ\Ñ”(d®∞ng)∑Ω≥ÃþM(j®¨n)––∑÷Œˆ£¨≤¢∏˘ì˛≤ªÕ¨µƒ∑Ω≥Ãþ\ðî∑Ω∑®ÅÌ(l®¢i)—–æøôC–µ ÷µƒΩM≥…ΩYòã≤ø∑÷£¨èƒ∂¯‘O”ã≥ˆ“ªÃ◊ÕÍ…∆µƒÇ}ɶ∞·þ\ôC–µ ÷‘O”ã∑Ω∞∏£¨þ_µΩ÷«ƒÐªØÇ}ɶ∞·þ\µƒƒøµƒ°£±æŒƒå¶ôC–µ ÷µƒ’˚ÇÄ(g®®)øÿ÷∆œµΩyþM(j®¨n)––‘O”㣨≤¢∏˘ì˛ôC–µ ÷µƒåç(sh®™)ÎH π”√–Ë«ÛÅÌ(l®¢i)嶜µΩyµƒÍP(gu®°n)ÊI≤ø∑÷þM(j®¨n)––ºö∑÷°£∆‰¥Œ£¨Õ®þ^(gu®∞)∑÷ŒˆôC–µ ÷ ÷±€µƒΩYòãΩM≥…≤ø∑÷£¨ÅÌ(l®¢i)∑÷ŒˆôC–µ ÷µƒ∞·þ\þ^(gu®∞)≥𣻪∫Û£¨þÄ嶒˚ÇÄ(g®®)Ç}éÏœµΩyµÿ∆‰À˚òã≥…≤ø∑÷þM(j®¨n)––∑÷Œˆ£¨“‘±„’“≥ˆôC–µ ÷◊Óº—þ\––Œª÷√£¨‘O”ã≥ˆ∑˚∫œ π”√“™«ÛµƒôC–µ◊• ÷∫Õÿõª@£¨“‘±„þ_µΩ∑÷ÃÙÿõŒÔµƒƒøµƒ°£±æŒƒ π”√¡ÀöWƒ∑˝à CP1H œµΩy PLC ÅÌ(l®¢i)åç(sh®™)¨FôC–µ ÷÷˜øÿ÷∆∆˜µƒ—–∞l(f®°)‘O”㣨≤¢¿L÷∆≥ˆÅÌ(l®¢i)¡ÀœýÍP(gu®°n)øÿ÷∆Îä¬∑àD£¨“‘¥ÀÅÌ(l®¢i)åç(sh®™)¨FôC–µ ÷Ðõº˛π§≥õƒ¡˜≥Ãøÿ÷∆°£◊Ó∫Û£¨þÄ π”√¡À Matlab Ðõº˛å¶ôC–µ ÷µƒþ\Ñ”(d®∞ng)Ðâ€EþM(j®¨n)––∑¬’ÊÚû◊C°£Õ¨ïr(sh®™)£¨±æŒƒþÄå¶ôC–µ ÷µƒÎäôCÚåÑ”(d®∞ng)∆˜°¢÷˜øÿ÷∆∆˜µ»É»»ðþM(j®¨n)––¡À‘îºöµƒ∑÷Œˆ°£◊Ó∫Û£¨Õ®þ^(gu®∞)úy‘áôC–µ ÷µƒ”≤º˛≤ø∑÷∫ÕÐõº˛≤ø∑÷ÅÌ(l®¢i)Úû◊CôC–µ ÷µƒ π”√µƒø…–––‘°£
°°°°æC…œ£¨Õ®þ^(gu®∞)Úû◊C£¨Ç}ɶ∞·þ\ôC–µ ÷ø…“‘ΩµµÕ»À𧵃Ñ⁄Ñ”(d®∞ng)¡¶£¨úp…Ÿ∆ÛòI(y®®)µƒ”√»À≥…±æ£¨ÃÊ¥˙»Àπ§èƒ ¬“ª–©Œ£ÎU–‘ð^¥Ûµƒπ§◊˜£¨∏¸∫√µƒ±£’œ¡À»À𧵃…˙√¸∞≤»´£¨ΩµµÕ¡À»Àπ§∞l(f®°)…˙Œ£ÎUµƒ∏≈¬ °£Õ¨ïr(sh®™)£¨ôC–µ ÷þÄæþlj∫Ð∫√µƒ∑Ä∂®–‘ƒÐ∫Õ∞≤»´ π”√–‘ƒÐ£¨ƒÐâÚΩµµÕ»Àπ§◊˜òI(y®®)∞l(f®°)…˙µƒÂe’`Üñ(w®®n)Ó}£¨Ã·∏þ∞·þ\µƒú ¥_¬ £¨”–¿˚”⁄÷∏þ∆ÛòI(y®®)µƒ –àˆ(ch®£ng)∏ÇÝ顶°£
°°°°ÍP(gu®°n)ÊI‘~£∫◊‘Ñ”(d®∞ng)ªØÇ}éÏ£ªôC–µ ÷£ªΩYòã‘O”㣪PLC;þ\Ñ”(d®∞ng)∑¬’Ê

ABSTRACT
°°°°With the rapid construction and development of the global market economy, China needs to promote the reform of industrial enterprises if it wants to occupy a share in the international market. In order to improve the intelligent and automated development process of China's industrial enterprises, China's enterprises need to study the current situation of the development of industrial manipulator, in view of the problem, put forward a scientific and appropriate intelligent warehousing handling manipulator design method, in order to improve the use efficiency of cargo transport, handling. Manipulator has become the main way to realize the automation and intelligentization reform of the enterprise. In People's Daily life, the manipulator appears in each domain scope, and has played the important role.
°°°°In this paper, in order to work out more scientific, intelligent manipulator, refer to the related literature at home and abroad, analyses the current situation of the development of domestic and foreign industrial machinery and summarized, and the kinematics of the manipulator knowledge study, analyze the equation of motion of the manipulator, and according to the equations of different transportation methods to study the structure of the manipulator parts, to design a set of perfect warehouse design of carrying manipulator, achieve the goal of intelligent storage and handling. This article will carry on the design to the manipulator entire control system, and carries on the subpision to the system key part according to the manipulator actual use demand. Secondly, through the analysis of the manipulator arm structure component, to analyze the manipulator handling process. Then, the other components of the whole warehouse system are analyzed to find out the optimal operation position of the manipulator, and to design the mechanical gripper and cargo basket that meet the requirements for use, so as to achieve the purpose of sorting the goods. This paper uses omron CPIH system PLC to realize the main controller of the manipulator r & d design, and draw out the relevant control circuit diagram, in order to achieve the manipulator software engineering process control. Finally, Matlab software is used to verify the motion trajectory of the manipulator. At the same time, this paper also carries on the detailed analysis to the manipulator motor driver, the main controller and so on content. Finally, by testing the hardware and software parts of the manipulator to verify the feasibility of the use of the manipulator.
°°°°To sum up, through verification, the warehouse handling manipulator can reduce the labor force, reduce the cost of employment in the enterprise, replace the labor to do some dangerous work, better protect the safety of human life, reduce the risk of labor. At the same time, the manipulator also has a very good stability and safety performance, can reduce the error caused by manual operation, improve the accuracy of handling, is conducive to improving the market competitiveness of enterprises.
°°°°Key words: automatic warehouse; manipulator; structural design; PLC; motion simulation
ƒø ‰õ
°°°°µ⁄“ª’¬ æw ’ì
°°°°1.1 —–æø±≥æ∞º∞“‚¡x
°°°°1.1.1 —–æø±≥æ∞
°°°°ÎS÷¯(zh®¥)»ÀÓê(l®®i)…Áï˛(hu®¨ )µƒ≤ªîýþM(j®¨n)≤Ω£¨ø∆åW(xu®¶)–≈œ¢ºº–g(sh®¥)“≤µ√µΩ¡ÀøÏÀŸµƒ∞l(f®°)’𰣑⁄π§òI(y®®)ôC–µÓI(l®´ng)”Ú¿Ô√Ê£¨ûÈ¡À÷∏þÿõŒÔµƒþ\ðîƒÐ¡¶£¨ôC–µ ÷±ª—–∞l(f®°)‘O”ã¡À≥ˆÅÌ(l®¢i)°£ôC–µ ÷≈c»ÀÓê(l®®i) ÷±€œýÀ∆£¨À¸æþlj÷¯(zh®¥)»ÀÓê(l®®i) ÷±€µƒ∫Ð∂ýƒÐ¡¶£¨ø…“‘∞¥’’»ÀÓê(l®®i)∞l(f®°)≥ˆµƒ÷∏¡Ó◊•»°ŒÔÛw£¨åç(sh®™)¨FŒÔÛwµƒ◊‘Ñ”(d®∞ng)ªØ≤Ÿ◊˜‘O÷√°£ÎS÷¯(zh®¥)Ωõ(j®©ng)ù˙µƒ≤ªîý∞l(f®°)’π£¨ôC–µ ÷“—Ωõ(j®©ng)±ªèV∑∫ë™”√”⁄∏˜––∏˜òI(y®®)°£ÎS÷¯(zh®¥)»´«ÚªØΩõ(j®©ng)ù˙µƒ∏þÀŸ∞l(f®°)’π£¨∆ÛòI(y®®)œÎ“™‘⁄á¯ÎH –àˆ(ch®£ng)÷–’ºì˛”–¡¶µÿŒª£¨–Ë“™÷ÿ“ï∆ÛòI(y®®)µƒ◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)ºº–g(sh®¥)∞l(f®°)’π£¨≤≈ƒÐâÚ◊Ó¥Û≥Ã∂»µƒÃ·∏þ∆ÛòI(y®®)µƒ…˙Æa(ch®£n)Ÿ|(zh®¨)¡ø∫Õ…˙Æa(ch®£n)–߬ °£ôC–µ ÷æÕ≥…ûÈ¡ÀÆî«∞∆ÛòI(y®®)åç(sh®™)¨F◊‘Ñ”(d®∞ng)ªØ°¢÷«ƒÐªØ∏ƒ∏Ôµƒ÷˜“™ÕæèΩ°£‘⁄»ÀÇɵƒ»’≥£…˙ªÓ÷–£¨ôC–µ ÷≥ˆ¨F‘⁄∏˜ÇÄ(g®®)ÓI(l®´ng)”Ú∑∂á˙É»£¨≤¢∞l(f®°)ì]≥ˆ¡À÷ÿ“™µƒ◊˜”√°£
°°°°ôC–µ ÷◊Ó≥ıµƒ‘O”ãƒøµƒ «ûÈ¡Àåç(sh®™)¨F∏þ∂Àø∆åW(xu®¶)ÓI(l®´ng)”Úµƒ—–æø£¨À¸÷˜“™±ª”√ÅÌ(l®¢i)ÃΩÀ˜∫£—ÛÈ_(k®°i)∞l(f®°)∫Õ”Ó÷ÊÃΩúy°£ÎS÷¯(zh®¥) –àˆ(ch®£ng)Ωõ(j®©ng)ù˙µƒøÏÀŸ∞l(f®°)’π£¨ôC–µ ÷÷ùu‘⁄Ω®÷˛––òI(y®®)°¢Õ⁄æÚ––òI(y®®)°¢ä ò∑(l®® )––òI(y®®)µ»ÓI(l®´ng)”Úµ√µΩ¡ÀøÏÀŸµƒ∞l(f®°)’π°£ø…“ä(ji®§n)£¨ôC–µ ÷µƒ π”√∑∂á˙◊ɵ√∑«≥£èV∑∫£¨ƒÐâÚùM(m®£n)◊„»ÀÇɵƒ≤ªÕ¨ π”√–Ë«Û°£ôC–µ ÷µƒ≥ˆ¨F£¨≤¢≤ª «≈º»ªµƒ£¨À¸ «ÎS÷¯(zh®¥)»ÀÓê(l®®i)…˙ªÓºº–g(sh®¥)ÀÆ∆Ωµƒ≤ªîý÷…˝∂¯—–∞l(f®°)≥ˆÅÌ(l®¢i)µƒ£¨“‘¥ÀÅÌ(l®¢i)÷∏þ∆ÛòI(y®®)µƒ…˙Æa(ch®£n)Ÿ|(zh®¨)¡ø∫Ֆ߬ £¨ùM(m®£n)◊„∏¸¥Ûµƒ –àˆ(ch®£ng) π”√–Ë«Û°£À˘“‘’f(shu®≠)£¨ôC–µ ÷ «ª˘”⁄ïr(sh®™)¥˙µƒ∞l(f®°)’π’Q…˙≥ˆÅÌ(l®¢i)µƒ°£ƒø«∞£¨ôC–µ ÷µƒ≤Ÿ◊˜π¶ƒÐþÄ∑«≥£ÜŒ“ª£¨«“–Ë“™∫ÐÈL(ch®¢ng)µƒïr(sh®™)ÈgÅÌ(l®¢i)÷ÿèÕÑ”(d®∞ng)◊˜°£ûÈ¥À£¨ûÈ¡ÀΩ‚∑≈»Àπ§≤Ÿ◊˜µƒ…˙Æa(ch®£n)¡¶∂»£¨ΩµµÕ»Àπ§≤Ÿ◊˜µƒŒ£ÎU–‘£¨‘⁄‘O”ãþ^(gu®∞)≥Ã÷–£¨“ª∂®“™¥_±£ôC–µ ÷÷ÿèÕÑ”(d®∞ng)◊˜µƒæ´¥_∂»£¨≤≈ƒÐâÚùM(m®£n)◊„èä¥ÛµƒÑ⁄Ñ”(d®∞ng)◊˜òI(y®®)¡ø°£π§òI(y®®)ôC∆˜»Àºº–g(sh®¥)∞l(f®°)’πµƒ∏þµÕ“—Ωõ(j®©ng)≥…ûÈ¡À∫‚¡ø ¿ΩÁ∏˜á¯π§òI(y®®)ªØ◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)ÀÆ∆Ωµƒ÷˜“™òÀú °£ƒø«∞£¨ ¿ΩÁ∏˜á¯“—Ωõ(j®©ng)È_(k®°i) º¡ÀôC–µ ÷µƒ—–∞l(f®°)‘O”㣨“ª–©á¯º““—Ωõ(j®©ng)‘⁄≤ø∑÷ôC–µ ÷—–æø÷–»°µ√¡ÀÕª≥ˆµƒ≥…øÉ(j®¨)£¨≤¢È_(k®°i)∞l(f®°)‘O”ã≥ˆÅÌ(l®¢i)¡À“ªœµ¡–π§òI(y®®)ôC∆˜»À[1].∂¯Ñì(chu®§ng )–¬–Õ°¢åç(sh®™)”√–‘µƒôC∆˜»ÀªÚ’þπ§òI(y®®)ôC–µ ÷ƒÐâÚùM(m®£n)◊„Æî«∞∆ÛòI(y®®)µƒ◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n) π”√–Ë«Û£¨“‘¥ÀÅÌ(l®¢i)ûÈ∆ÛòI(y®®)÷π©∏¸∫√µƒ∑˛Ñ’(w®¥)°£”…”⁄Ç}ɶœµΩy嶔⁄úÿ∂»°¢ùÒ∂»µ»≠h(hu®¢n)æ≥”–÷¯(zh®¥)“ª∂®µƒ“™«Û£¨À˘“‘£¨‘⁄þM(j®¨n)––Ç}ɶÿõŒÔ∞·þ\ïr(sh®™)£¨Ç˜Ωyµƒ»Àπ§∞·þ\ƒ£ Ω“—Ωõ(j®©ng)üo(w®≤)∑®ùM(m®£n)◊„¨F¥˙ªØ∆ÛòI(y®®)µƒ π”√–Ë«Û°£“Ú¥À£¨∆ÛòI(y®®)º±–Ë—–∞l(f®°)‘O”ã≥ˆ“ªøÓ◊‘Ñ”(d®∞ng)ªØ°¢÷«ƒÐªØ≥Ã∂»ð^∏þµƒôC–µ ÷øÿ÷∆œµΩyÅÌ(l®¢i)åç(sh®™)¨FÇ}ɶœµΩyµƒ∞·þ\π§◊˜°£
°°°°1.1.2 —–æø“‚¡x
°°°° ¿ΩÁΩõ(j®©ng)ù˙µƒ∂ý‘™ªØ∞l(f®°)’𣨔–¡¶µƒÕ∆Ñ”(d®∞ng)¡À»´«ÚΩõ(j®©ng)ù˙µƒþM(j®¨n)≤Ω£¨¥Ÿ πá¯ÎH –àˆ(ch®£ng)µƒ∏ÇÝé◊ɵ√‘ΩÅÌ(l®¢i)‘Ω¥Û°£∆ÛòI(y®®)ûÈ¡À÷∏þ◊‘…̵ƒ –àˆ(ch®£ng)µÿŒª£¨√Ê≈R÷¯(zh®¥)ºº–g(sh®¥)∏Ô–¬µƒÜñ(w®®n)Ó}°£∆ÛòI(y®®)÷ª”–åç(sh®™)¨Fπ§òI(y®®)◊‘Ñ”(d®∞ng)ªØ∞l(f®°)’π£¨≤≈ƒÐâÚ‘⁄Ωõ(j®©ng)ù˙ –àˆ(ch®£ng)÷–´@µ√Éû(y®≠u)Ñð°£∂¯Ç}ɶ∞·þ\ôC–µ ÷æÕƒÐâÚÃÊ¥˙ǘΩy»Àπ§∑Ω ΩÅÌ(l®¢i)þM(j®¨n)––ÿõŒÔµƒ∞·þ\∫Õπп̣¨ø…“‘”––ßµƒÃ·∏þ∆ÛòI(y®®)µƒ…˙Æa(ch®£n)Ÿ|(zh®¨)¡ø∫ÕÞk ¬–߬ °£À˘“‘£¨Ç}ɶôC–µ ÷‘⁄»·–‘÷∆‘ÏÓI(l®´ng)”Ú÷–∞Á—ð’þ÷ÿ“™µƒΩ«…´£¨À¸ø…“‘ÃÊ¥˙»ÀÓê(l®®i)ªÚ’þÖf(xi®¶)÷˙»ÀÓê(l®®i)ÕÍ≥…≤ªÕ¨Óê(l®®i)–Õµƒπ§◊˜°£“ÚûÈ£¨Ç˜Ωyµƒ»Àπ§∞·þ\∑Ω ΩÕ˘Õ˘ï˛(hu®¨ )ª®ŸM¥Û¡øµƒ∞·þ\ïr(sh®™)Èg∫Õ∞·þ\≥…±æ£¨åß÷¬∆ÛòI(y®®)µƒ∆‰À¸π§–Ú‘OljæÕï˛(hu®¨ )Ãé”⁄Èe÷√ÝÓëB(t®§i)£¨üo(w®≤)∑®µ√µΩ”––ßµƒ¿˚”√°£∂¯ π”√ôC–µ∞·þ\∑Ω ΩƒÐâÚ”––ßµƒÃ·…˝∞·þ\µƒïr(sh®™)Èg∫ÕŸ|(zh®¨)¡ø£¨ø…“‘∏¸∫√µƒÃ·…˝∆ÛòI(y®®)µƒ…˙Æa(ch®£n)ÀŸ∂»∫Ֆ߬ “‘º∞Ÿ|(zh®¨)¡ø°£Æî«∞£¨ôC–µ ÷èƒ ¬∞·þ\π§◊˜µƒ–߬ Õ˘Õ˘ «Ç˜Ωy»Àπ§∞·þ\µƒ 2-2.5 ±∂£¨Æa(ch®£n)∆∑µƒ∫œ∏Ò¬ “≤µ√µΩ¡ÀÔ@÷¯(zh®¥)µƒÃ·…˝£¨þ_µΩ¡À7%.
°°°°Ç}ɶ∞·þ\ôC–µ ÷þÄø…“‘ΩµµÕπ§»ÀµƒÑ⁄Ñ”(d®∞ng)¡¶£¨úp…Ÿ∆ÛòI(y®®)µƒ”√»À≥…±æ£¨ÃÊ¥˙π§»Àèƒ ¬“ª–©Œ£ÎU–‘ð^¥Ûµƒπ§◊˜£¨∏¸∫√µƒ±£’œ¡Àπ§»Àµƒ…˙√¸∞≤»´£¨ΩµµÕ¡Àπ§»À∞l(f®°)…˙Œ£ÎUµƒ∏≈¬ °£Õ¨ïr(sh®™)£¨ôC–µ ÷þÄæþlj∫Ð∫√µƒ∑Ä∂®–‘ƒÐ∫Õ∞≤»´ π”√–‘ƒÐ£¨ƒÐâÚΩµµÕπ§»À◊˜òI(y®®)∞l(f®°)…˙µƒÂe’`Üñ(w®®n)Ó}£¨Ã·∏þ∞·þ\µƒú ¥_¬ £¨”–¿˚”⁄÷∏þ∆ÛòI(y®®)µƒ –àˆ(ch®£ng)∏ÇÝ顶°£
°°°°1.2 π§òI(y®®)ôC∆˜»À∏≈õr
°°°°‘Á‘⁄…œ ¿ºo≥ı∆⁄£¨ôC∆˜»ÀæÕ’Q…˙≥ˆÅÌ(l®¢i)¡À°£µ´ «Ωõ(j®©ng)þ^(gu®∞)é◊ ƃ͵ƒºº–g(sh®¥)∏¸–¬∫Õ∞l(f®°)’π£¨ôC∆˜»À‘⁄∂˛ Æ“ª ¿ºoµ√µΩ¡À»´√ʵƒ∞l(f®°)’π°£”…”⁄ôC∆˜»À—–æø…ʺ∞¡À∂ý∑Nå£(zhu®°n)òI(y®®)ºº–g(sh®¥)£¨À¸µƒ—–∞l(f®°)‘O”㓪÷±Ãé”⁄ºº–g(sh®¥)ÓI(l®´ng)”Úµƒ◊Ó∏þÎA∂Œ°£Æî«∞£¨ôC∆˜»Àºº–g(sh®¥)÷–µƒŒ¢Îä◊”ºº–g(sh®¥)∫Õ”ãÀ„ôCºº–g(sh®¥)°¢ôC–µ≈cæ´√ÐôC–µºº–g(sh®¥)°¢Ç˜∏–∆˜ºº–g(sh®¥)°¢–≈œ¢Ãé¿Ìºº–g(sh®¥)µ» «Æî«∞»ÀÇÉ÷ÿ¸c(di®£n)—–æøµƒºº–g(sh®¥)Ìóƒø[2].∂¯◊‘Ñ”(d®∞ng)ªØøÿ÷∆ºº–g(sh®¥)∫ÕÚåÑ”(d®∞ng)∆˜ºº–g(sh®¥)“‘º∞»Àπ§÷«ƒÐºº–g(sh®¥)“—Ωõ(j®©ng)≥…ûÈ¡À∏þ–¬ºº–g(sh®¥)µƒ÷ÿ“™—–æø≥…π˚£¨À¸ «“ª∑NôCÎ䓪ÛwªØºº–g(sh®¥)£¨ø…“‘èƒ ¬∏˜∑NÓê(l®®i)–Õµƒπ§òI(y®®)◊˜òI(y®®)°£±æŒƒå¢ª˘”⁄π§òI(y®®)ôC∆˜»ÀþM(j®¨n)––∑÷Óê(l®®i)£¨≤¢å¶ôC∆˜»Àµƒ≤ªÕ¨Ñ”(d®∞ng)◊˜–ŒëB(t®§i)þM(j®¨n)––’f(shu®≠)√˜°£Æî«∞£¨ôC∆˜»Àø…“‘∑÷ûÈπ§òI(y®®)ôC∆˜»À∫Õ÷±Ω«◊¯òÀ–ÕôC∆˜»À“‘º∞òO◊¯òÀ–ÕôC∆˜»À°¢∂ýÍP(gu®°n)πù–ÕôC∆˜»Àµ»°£
°°°°£®1£©÷±Ω«◊¯òÀ–ÕôC∆˜»À°£À¸”–÷¯(zh®¥)∫Ð∫√µƒ π”√∑Ä∂®–‘ƒÐ£¨ƒÐâÚåç(sh®™)¨F∫∏Ω”°¢∞·þ\µ»∫Ü(ji®£n)ÜŒ◊˜òI(y®®)°£À¸µƒþ\Ñ”(d®∞ng)∑Ω Ω∫ÕΩM≥…ΩYòã∂º∑«≥£∫Ü(ji®£n)ÜŒ£¨ «“ª∑N π”√∏≈¬ ∫Õ π”√∑∂á˙∑«≥£¥ÛµƒôC∆˜»À[3].‘⁄þM(j®¨n)––œýÍP(gu®°n)≤Ÿ◊˜◊˜òI(y®®)ïr(sh®™)£¨À¸∞l(f®°)…˙Âe’`µƒ∏≈¬ ∑«≥£µÕœ¬°£Îm»ª÷±Ω«◊¯òÀ–ÕôC∆˜»À‘⁄åç(sh®™)ÎHþ\Ñ”(d®∞ng)þ^(gu®∞)≥Ã÷–£¨ï˛(hu®¨ )∞l(f®°)…˙…‘Œ¢µƒ∆´“∆ªÚ’þ∏ƒ◊É“ª¸c(di®£n)¸c(di®£n)þ\Ñ”(d®∞ng)Ðâ€E£¨µ´ «£¨∆‰àÖ–◊˜òI(y®®)µƒ≥…π¶∏≈¬ Ös∑«≥£∏þ£¨þÄø…“‘∏˘ì˛≤ªÕ¨ π”√–Ë«ÛÅÌ(l®¢i)∏ƒ◊É◊‘…̵ƒΩM∫œ–Œ Ω£¨”»∆‰ « ÷≤øΩYò㣨”–÷¯(zh®¥)“ª∂®µƒÏ`ªÓ∂»[4].µ´ «£¨÷±Ω«◊¯òÀ–ÕôC∆˜»Àµƒ’˚Ûw‘O”ã≥þ¥Áþ^(gu®∞)”⁄∆´¥Û£¨‘⁄ π”√∑∂á˙þÄ «¥Ê‘⁄÷¯(zh®¥)“ª∂®µƒœÞ÷∆°£
°°°°£®2£©àA÷˘◊¯òÀ–ÕôC∆˜»À°£“ÚûÈÀ¸Ãé”⁄¥π÷±ÝÓëB(t®§i)ïr(sh®™)£¨’JûÈÀÆ∆Ω√Ê…œµƒòO◊¯òÀÃé”⁄÷±Ω«–Õ£¨À˘“‘£¨À¸–Ë“™þM(j®¨n)––◊¯òÀ◊ɪØÅÌ(l®¢i)åç(sh®™)¨Fπ§◊˜≤Ÿ◊˜πп̵ƒ£¨À¸÷˜“™ÿìÿü“ª–©∞·þ\∑∂á˙–°µƒ∞·þ\π§◊˜[5].
°°°°£®3£©òO◊¯òÀ–ÕôC∆˜»À°£òO◊¯òÀ–ÕôC∆˜»ÀƒÐþm”√”⁄ π”√∑∂á˙ð^¥Ûµƒπ§◊˜£¨À¸µƒ±æÛwΩYòã◊‘Ñ”(d®∞ng)∂»ð^¥Û£¨ø…“‘þM(j®¨n)––É…ÇÄ(g®®)–˝ÞD∫Õ“ªÇÄ(g®®)…Ïøsþ\Ñ”(d®∞ng)°£µ´ «£¨À¸‘⁄åç(sh®™)ÎH≤Ÿ◊˜ π”√þ^(gu®∞)≥Ã÷–£¨–Ë“™Ωõ(j®©ng)þ^(gu®∞)◊¯òÀ”ãÀ„≤≈ƒÐâÚåç(sh®™)¨Fπ§◊˜å¶œÛµƒŒª÷√≤Ÿ◊˜πп̰£À˘“‘£¨÷˜“™±ª”√”⁄¸c(di®£n)∫∏°¢áä∆·µ»◊˜òI(y®®)[6].
°°°°£®4£©∂ýÍP(gu®°n)πù–ÕôC∆˜»À°£∂ýÍP(gu®°n)πù–ÕôC∆˜»À «”…∂ýÇÄ(g®®)ÍP(gu®°n)πùΩM∫œ≥…𶵃£¨À¸ø…“‘åç(sh®™)¨F∂ý∑Nþ\Ñ”(d®∞ng)Ðâ€E£¨þ_µΩƒøòÀŒª÷√£¨ƒÐâÚþm”√”⁄≤ªÕ¨µƒπ§◊˜≠h(hu®¢n)æ≥ÝÓëB(t®§i)£¨ùM(m®£n)◊„≤ªÕ¨Óê(l®®i)–Õµƒπ§◊˜»ŒÑ’(w®¥)–Ë«Û°£À¸µƒ≤Ÿ◊˜ π”√–Ë“™Ωõ(j®©ng)þ^(gu®∞)◊¯òÀ◊ɪؔãÀ„∫Õπ§◊˜å¶œÛŒª÷√øÿ÷∆ÅÌ(l®¢i)åç(sh®™)¨F£¨þ@∑N≤Ÿ◊˜∑Ω ΩæÕåß÷¬¡À∆‰≤Ÿ◊˜∑Ω Ωøÿ÷∆Îy∂»ð^¥Û[7].Îm»ª∆‰≤Ÿ◊˜œý嶿ßÎy£¨µ´ «”…”⁄∆‰◊‘…Ìæþlj÷¯(zh®¥)∫Ð∫√µƒ π”√–‘ƒÐ£¨«“≤Ÿ◊˜ÀŸ∂»ð^øÏ£¨þÄ «µ√µΩ¡ÀèV∑∫µƒ π”√°£ƒø«∞£¨ ¿ΩÁ∏˜á¯—–æø»ÀÜT“—Ωõ(j®©ng)È_(k®°i) ºå¢ôC∆˜»À—–æø÷ÿ¸c(di®£n)∑≈‘⁄¡Àþ@∑NÓê(l®®i)–ÕµƒôC∆˜»À…œ√Ê£¨“ÚûÈÀ¸µƒ≤Ÿ◊˜∑Ω Ω≈c»ÀÓê(l®®i)µƒ ÷±€≤Ÿ◊˜∑Ω ΩÓê(l®®i)À∆£¨ƒÐâÚÃÊ¥˙»ÀÓê(l®®i)þM(j®¨n)––—b≈‰°¢áä∆·µ»Ï`ªÓ–‘ð^∏þµƒπ§◊˜°£
°°°°1.3 ôC–µ ÷‘⁄á¯É»Õ‚µƒ∞l(f®°)’π¨FÝÓ∫Õ⁄ÖÑð
°°°°1.3.1 ôC–µ ÷‘⁄á¯Õ‚µƒ∞l(f®°)’π¨FÝÓ
°°°°…œ ¿ºoŒÂ ƃͥ˙£¨π§òI(y®®)ôC–µ ÷±ª’Q…˙≥ˆÅÌ(l®¢i)£¨À¸ª˘”⁄»ÀÓê(l®®i) ÷±€µƒòã‘Ï∑Ω ΩÅÌ(l®¢i)åç(sh®™)¨F◊‘Ñ”(d®∞ng)ªØ—b÷√µƒøÿ÷∆πп̰£ÎS÷¯(zh®¥)ïr(sh®™)¥˙µƒ≤ªîý∞l(f®°)’π£¨ôC–µ ÷ºº–g(sh®¥)÷ùu ÐµΩ¡Àπ§òI(y®®)ÓI(l®´ng)”Ú—–æøå£(zhu®°n)º“µƒ÷ÿ“Ωõ(j®©ng)þ^(gu®∞)é◊ ƃ͵ƒ≤ªîý∞l(f®°)’π£¨π§òI(y®®)ôC–µ ÷ºº–g(sh®¥)“—Ωõ(j®©ng)≥…ûÈ¡À“ªÈT(m®¶n)¨F¥˙ªØ◊‘Ñ”(d®∞ng)øÿ÷∆ºº–g(sh®¥)£¨À¸ƒÐâÚùM(m®£n)◊„∂ýÇÄ(g®®)––òI(y®®)µƒ π”√–Ë«Û£¨¿˝»Á·tØü––òI(y®®)°¢ôC–µ––òI(y®®)°¢Îä◊”––òI(y®®)µ»[8].
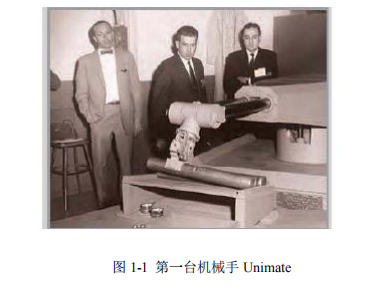
°°°°1958 ƒÍ£¨√¿á¯‘O”ã≥ˆÅÌ(l®¢i)¡À ¿ΩÁ…œµ⁄“ª≈_ôC–µ ÷£¨À¸‘⁄ôC–µ ÷µƒ∂À≤øŒª÷√≈‰÷√¡À“ªÇÄ(g®®)Îä¥≈ËFÚåÑ”(d®∞ng)£¨“‘±„ƒÐâÚÚåÑ”(d®∞ng)ôC–µ ÷◊•»°π§º˛ΩYòã°£þ@≈_ôC–µ ÷µƒ≥ˆ¨F£¨ÞZÑ”(d®∞ng)¡À ¿ΩÁ∏˜á¯°£Ωõ(j®©ng)þ^(gu®∞)é◊ƒÍôC–µ ÷µƒ≤ªîý—–∞l(f®°)£¨√¿á¯ôC–µ÷∆‘Ï∆ÛòI(y®®)”÷Õ∆≥ˆ¡À“ªÃ◊îµøÿ æΩÑŸ¨FôC–µ ÷£¨þ@øÓôC–µ ÷±ª√¸√˚ûÈ Unimate,À¸µƒ‘O”ã «ª˘”⁄ÃπøÀ≈⁄À˛ÅÌ(l®¢i)åç(sh®™)¨Fµƒ£¨ƒÐâÚÕ®þ^(gu®∞)“∫â∫œµΩyÅÌ(l®¢i)ÚåÑ”(d®∞ng)ôC–µ ÷±€þM(j®¨n)––◊˜òI(y®®)[9].þ@øÓôC–µ ÷øÇ÷ÿ¡øûÈÉ…áç“‘…œ£¨∆‰÷–£¨ôC–µ ÷µƒ÷˜ôC–µ ÷±€±ª‘O÷√‘⁄ôC◊˘Œª÷√£¨ƒÐâÚåç(sh®™)¨FôC◊˘µƒªÿÞDþ\Ñ”(d®∞ng)°£
°°°°∂¯‘⁄ôC–µ ÷±€µƒŒ≤≤øŒª÷√”÷‘O”ã¡À“ªÇÄ(g®®)ôC–µ ÷ÕÛ£¨÷˜“™”√”⁄åç(sh®™)¨F◊•»°π¶ƒÐ[10].þ@≈_ôC–µ ÷µƒÜñ(w®®n) ¿£¨”––ßµƒÃÊ¥˙¡À»ÀÓê(l®®i) ÷±€π§◊˜£¨æ´¥_∂»þ_µΩ¡À 1/10000 ”¢¥Á£¨ûÈ∫Û∆⁄µƒôC–µ ÷—–æøµÏ∂®¡Àîµì˛÷ß≥÷°£»ÁàD 1-1 À˘ æ°£
°°°°1962 ƒÍ£¨√¿á¯“ªº“ºº–g(sh®¥)π´Àæ≥…π¶‘O”ã≥ˆ¡À ¿ΩÁ…œµ⁄“ª≈_àA÷˘◊¯òÀ–Õπ§òI(y®®)ôC∆˜»À£¨þ@≈_ôC∆˜»À±ª√¸√˚ûÈ Versatran ôC–µ ÷°£þ@≈_ôC–µ ÷µƒ∞·þ\Ñ”(d®∞ng)◊˜◊ɵ√∏¸º”µƒÏ`ªÓ£¨ƒÐâÚ∏¸∫√µƒåç(sh®™)¨Fþ\Ñ”(d®∞ng)¬∑æÄ(xi®§n)µƒøÿ÷∆[12].
°°°°1970 ƒÍ£¨» ø RETAB π´Àæ≥…π¶‘O”ã≥ˆ“ª∑N”√”⁄áäÕø◊˜òI(y®®)µƒôC–µ ÷£¨À¸ «Õ®þ^(gu®∞) æΩõƒ∑Ω ΩÅÌ(l®¢i)åç(sh®™)¨FôC∆˜»ÀÑ”(d®∞ng)◊˜πп̵ƒ°£Õ¨ƒÍ£¨µ¬á¯π´Àæ KnKa “≤≥…π¶—–∞l(f®°)‘O”ã≥ˆÅÌ(l®¢i)“ª∑NÃÊ¥˙»Àπ§¸c(di®£n)∫∏µƒôC–µ ÷£¨À¸ «Õ®þ^(gu®∞)≥ÖÚøÿ÷∆ÅÌ(l®¢i)åç(sh®™)¨FôC∆˜»ÀÑ”(d®∞ng)◊˜πп̵ƒ°£»ÁàD 1-2 À˘ æ[13].

°°°°√¿á¯ Unimate π´ÀæΩõ(j®©ng)þ^(gu®∞)≈c“ª–©¥ÛåW(xu®¶)þM(j®¨n)––∫œ◊˜£¨π≤Õ¨‘O”ã≥ˆ¡À“ª∑N π”√≥…±æµÕ¡Æ°¢ π”√ø…øø–‘ƒÐè䵃ôC–µ ÷[14].Ωõ(j®©ng)þ^(gu®∞)åç(sh®™)Úû—–æø◊C√˜¡À√˚ûÈ Unimate-Vic-am π§òI(y®®)ôC–µ ÷‘⁄∂®Œª∑Ω√Ê”–÷¯(zh®¥)∫Ð∫√µƒæ´¥_∂»£¨«“’`≤Ó–°”⁄ 1mm,ƒÐâÚùM(m®£n)◊„ 24 –°ïr(sh®™)≤ªÈgîýπ§◊˜£¨«“þ\––þ^(gu®∞)≥Ã÷–£¨õ](m®¶i)”–≥ˆ¨Fπ ’œÜñ(w®®n)Ó}°£À¸ «”…“ª≈_–°–ÕÎä◊””ãÀ„ôCÅÌ(l®¢i)åç(sh®™)¨FÑ”(d®∞ng)◊˜øÿ÷∆πп̵ƒ[15].
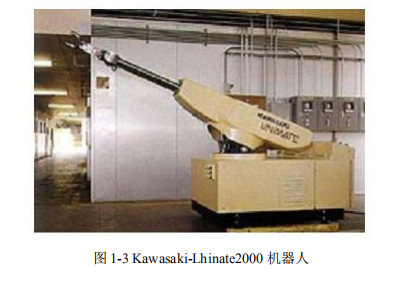
°°°°1969 ƒÍ£¨»’±æŸèŸI(m®£i)¡À“ª≈_√¿á¯—–∞l(f®°)‘O”㵃ôC–µ ÷£¨Ωõ(j®©ng)þ^(gu®∞)…ӻΗ–æø£¨‘O”ã≥ˆÅÌ(l®¢i)¡À»’±æµ⁄“ª≈_π§òI(y®®)ôC∆˜»À Kawasaki-Lhinate2000.Ωõ(j®©ng)þ^(gu®∞)é◊ ƃ͵ƒ≤ªîý∞l(f®°)’𣨻’±æ∆ÛòI(y®®)“—Ωõ(j®©ng)‘⁄ôC–µ ÷ºº–g(sh®¥)ÓI(l®´ng)”Ú∑Ω√Ê»°µ√¡ÀÕª≥ˆµƒ≥…æÕ[16].‘⁄ 1990 ƒÍ£¨»’±æ≥…π¶—–∞l(f®°)≥ˆÅÌ(l®¢i)µƒôC–µ ÷“—Ωõ(j®©ng)þ_µΩ¡ÀŒÂ Æ∂ý»f(w®§n)≈_£¨≤¢«“√øƒÍ∞¥’’ 50%µƒÀŸ∂»‘⁄≤ªîý‘ˆÈL(ch®¢ng)°£»ÁàD 1-3 À˘ æ°£
°°°°‘Á‘⁄…œ ¿ºo¡˘ ƃͥ˙£¨«∞ÃK¬ì(li®¢n)æÕÈ_(k®°i) ºå¶ôC–µ ÷þM(j®¨n)––—–æø£¨”…”⁄∆‰◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)ÀÆ∆ΩµÕœ¬£¨÷±µΩ∆þ ƃͥ˙£¨≤≈≥…π¶‘O”ã≥ˆπ§òI(y®®)ôC∆˜»À[17].
°°°°1.3.2 ôC–µ ÷‘⁄á¯É»µƒ∞l(f®°)’π¨FÝÓ
°°°°Œ“᯵ƒôC–µ ÷∞l(f®°)’πΩõ(j®©ng)öv¡ÀÀƒÇÄ(g®®)ÎA∂Œ°£µ⁄“ªÇÄ(g®®)ÎA∂Œ‘⁄…œ ¿ºo∆þ ƃͥ˙£¨þ@ÇÄ(g®®)ïr(sh®™)∆⁄µƒá¯É»∆ÛòI(y®®)‘⁄ôC–µºº–g(sh®¥)ÓI(l®´ng)”Ú…œþÄõ](m®¶i)”–»°µ√»Œ∫Œ≥…øÉ(j®¨)°£Ωõ(j®©ng)þ^(gu®∞)“˝þM(j®¨n)á¯Õ‚œ»þM(j®¨n)ø∆åW(xu®¶)≥…π˚£¨Ωõ(j®©ng)þ^(gu®∞)≤ªîýåW(xu®¶)¡ï∫ÕÃΩÀ˜“‘º∞∑÷Œˆ£¨ÅÌ(l®¢i)÷…˝Œ“á¯ôC–µºº–g(sh®¥)ÀÆ∆Ω°£µ⁄∂˛ÇÄ(g®®)ÎA∂Œ‘⁄…œ ¿ºo∞À ƃͥ˙£¨þ@ÇÄ(g®®)ïr(sh®™)∆⁄µƒá¯É»∆ÛòI(y®®)‘⁄ôC–µºº–g(sh®¥)—–æø…œ“—Ωõ(j®©ng)µ√µΩ¡À“ª∂®Ωõ(j®©ng)Úû£¨≤¢È_(k®°i) º◊‘º∫Ñ”(d®∞ng) ÷÷∆◊˜ôC∆˜»À[18].µ⁄»˝ÇÄ(g®®)ÎA∂ŒûÈ…œ ¿ºoæ≈ ƃͥ˙£¨þ@ÇÄ(g®®)ïr(sh®™)∆⁄µƒá¯É»∆ÛòI(y®®)“—Ωõ(j®©ng)µ√µΩ¡À“ª–©Ô@÷¯(zh®¥)µƒ≥…π˚£¨¿˝»Á…œ∫££®ø¬ÒR£©∆˚Ðá(ch®•)‘Olj”–œÞπ´ÀææÕ∏˘ì˛øÕëÙ(h®¥)µƒ π”√–Ë«Û‘O”ã≥ˆÅÌ(l®¢i)¡À“ªøÓôC–µ ÷£¨»ÁàD 1-4 À˘ æ°£µ´ «£¨þ@ÇÄ(g®®)ïr(sh®™)∆⁄µƒôC–µ ÷ºº–g(sh®¥)»‘≈fð^ûȬ‰∫Û£¨þÄ «“¿øøþM(j®¨n)ø⁄µƒ∑Ω ΩÅÌ(l®¢i)åç(sh®™)¨Fµƒ[19].µ⁄ÀƒÇÄ(g®®)ÎA∂ŒûÈ 2015 ƒÍ£¨Œ“á¯ø∆åW(xu®¶)ºº–g(sh®¥)µƒ≤ªîýþM(j®¨n)≤Ω£¨Œ“ᯓ—Ωõ(j®©ng)åç(sh®™)¨F¡ÀôC–µ ÷µƒ…˙Æa(ch®£n)£¨ì˛’{≤È£¨Œ“á¯á¯É»µƒôC–µ ÷øûÈÉ…»f(w®§n)≈_°£å¶”⁄þ@ÇÄ(g®®)îµì˛£¨’f(shu®≠)√˜¡ÀŒ“ᯑ⁄ôC–µºº–g(sh®¥)ÓI(l®´ng)”Ú…œ√ÊþÄ”–∫Ð∂ý¿ßÎy£¨þÄ–Ë“™≤ªîýåW(xu®¶)¡ï∫Õ÷…˝◊‘º∫µƒºº–g(sh®¥)£¨≤≈ƒÐâÚ‘⁄á¯ÎH –àˆ(ch®£ng)÷–’ºì˛”–¡¶µÿŒª°£

°°°°1972 ƒÍ£¨…œ∫£‘O”ã≥ˆÅÌ(l®¢i)¡À“ª≈_π§òI(y®®)ôC–µ ÷£¨À¸ «Œ“᯵⁄“ª≈_π§òI(y®®)ôC–µ ÷°£ÎS÷¯(zh®¥)Ωõ(j®©ng)ù˙µƒ∞l(f®°)’π£¨Œ“á¯ôC–µ ÷≤ªîý±ª—–∞l(f®°)‘O”ã≥ˆÅÌ(l®¢i)°£‘⁄’˛∏Æ≤øÈT(m®¶n)÷∆∂®µƒµ⁄∆þÇÄ(g®®)"ŒÂƒÍ”ãÑù"¿Ô√Ê£¨π§òI(y®®)ôC–µ ÷ºº–g(sh®¥)“—Ωõ(j®©ng)µ√µΩ¡ÀøÏÀŸµƒ∞l(f®°)’π°£Œ“ᯜýÍP(gu®°n)≤øÈT(m®¶n)∫Õ∆ÛòI(y®®)“≤È_(k®°i) º◊¢÷ÿôC–µ ÷µƒºº–g(sh®¥)—–∞l(f®°)°£Ωõ(j®©ng)þ^(gu®∞)᯺“’˛≤þµƒ÷ß≥÷£¨∏˜ÇÄ(g®®)∆ÛòI(y®®)µƒ≤ªîý≈¨¡¶£¨Œ“ᯓ—Ωõ(j®©ng)‘⁄◊‘Ñ”(d®∞ng)ªØ—–æøÓI(l®´ng)”Ú÷–»°µ√¡À“ª–©Õª≥ˆµƒ≥…æÕ°£¿˝»Á£¨±±æ©—–æøÀ˘æÕ‘O”ã≥ˆÅÌ(l®¢i)¡À“ª≈_”√”⁄áäÕø◊˜òI(y®®)µƒôC∆˜»À[20].ÎS÷¯(zh®¥)π§òI(y®®)ôC∆˜»Àµƒ∞l(f®°)’π£¨π§òI(y®®)ôC∆˜»ÀµƒœýÍP(gu®°n)≈‰º˛‘Olj“≤±ªéßÑ”(d®∞ng)¡À∆ÅÌ(l®¢i)°£å¶”⁄ôC–µ ÷ÅÌ(l®¢i)’f(shu®≠)£¨◊Ó÷ÿ“™µƒ≤øº˛æÕ «øÿ÷∆∆˜£¨À¸ƒÐâÚéÕ÷˙ôC–µ ÷åç(sh®™)¨F÷«ƒÐªØπп̰£÷–á¯ø∆åW(xu®¶)‘∫◊‘Ñ”(d®∞ng)ªØ—–æøÀ˘∫Õ±±æ©ø∆ºº¥ÛåW(xu®¶)—–æøÀ˘å£(zhu®°n)ÈT(m®¶n)ΩM≥…¡Àø∆åW(xu®¶)—–æø–°ΩMå¶ôC–µ ÷µƒøÿ÷∆∆˜þM(j®¨n)––¡À÷ÿ¸c(di®£n)—–æø£¨≤¢»°µ√¡À“ª∂®µƒ≥…π˚°£
°°°°∂˛ Æ“ª ¿ºo£¨Œ“ᯓ—Ωõ(j®©ng)‘⁄ôC–µ÷∆‘Ϻº–g(sh®¥)ÓI(l®´ng)”Ú°¢◊‘Ñ”(d®∞ng)ªØøÿ÷∆ÓI(l®´ng)”Ú∑Ω√ʵ√µΩ¡ÀÔ@÷¯(zh®¥)µƒø∆—–≥…øÉ(j®¨)£¨“—Ωõ(j®©ng)◊å÷«ƒÐªØôC–µ»•ºº–g(sh®¥)µ√µΩ≤ªîý÷…˝£¨≤ªîý±ª∆ÛòI(y®®)ë™”√°£”»∆‰ «»·–‘÷∆‘Ϻº–g(sh®¥)∫Õ◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)∑Ω√Ê£¨ôC∆˜»À±ªÃÊ¥˙»Àπ§ ÷±€≥ˆàÖ–“ª–©þ^(gu®∞)”⁄Œ£ÎUµƒπ§◊˜£¨∫Ð∫√µƒΩ‚∑≈¡À»ÀÓê(l®®i)µƒÑ⁄Ñ”(d®∞ng)¡¶£¨Ã·∏þ¡ÀŸ|(zh®¨)¡ø∫Ֆ߬ [21].
°°°°ÎS÷¯(zh®¥)ôC–µ ÷ºº–g(sh®¥)µƒ≤ªîý∏¸–¬£¨Œ“ᯑ⁄÷«ƒÐªØôC–µ ÷—–æøÓI(l®´ng)”Ú÷–»°µ√¡ÀÕª≥ˆµƒ≥…π˚°£∂¯”ãÀ„ôCºº–g(sh®¥)µƒ∞l(f®°)’𣨔––ßµƒ¥ŸþM(j®¨n)¡ÀôC–µ ÷µƒøÿ÷∆œµΩy—–æø£¨∫Ð∫√µÿΩ‚õQ¡ÀôC–µ ÷≤Ÿ◊˜≥ˆ¨FÂe’`µƒÜñ(w®®n)Ó}£¨ πµ√ôC–µ ÷ƒÐâÚ∞¥’’‘O∂®µƒ÷∏¡ÓþM(j®¨n)––èÕÎsµƒÑ”(d®∞ng)◊˜°£
°°°°ƒø«∞£¨Œ“ᯠ–√Ê…œ“—Ωõ(j®©ng)≥ˆ¨F¡À∏˜∑N∏˜ò”µƒÕ®”√–ÕôC–µ ÷£¨‘⁄åç(sh®™)ÎH ©π§þ^(gu®∞)≥Ã÷–£¨ƒÐâÚåç(sh®™)¨FŒÔ¡œµƒþ\ðîπп̣¨ø…“‘ë™”√”⁄¥Û–ÕîµøÿôC¥≤[22].”…”⁄Õ®”√–ÕôC–µ ÷ π”√¡À≥ÖÚøÿ÷∆∑Ω ΩÅÌ(l®¢i)þM(j®¨n)––ôC–µ ÷ÚåÑ”(d®∞ng)∫Õ≤Ÿ◊˜“‘º∞þ\––πп̵ƒ£¨À˘“‘£¨þ@øÓôC–µ ÷‘⁄Ï`ªÓ–‘ƒÐ…œ”–÷¯(zh®¥)∫Ð¥ÛµƒÉû(y®≠u)Ñ𣨃ÐâÚùM(m®£n)◊„≤ªÕ¨Óê(l®®i)–Õµƒ π”√≠h(hu®¢n)æ≥°£
°°°°1.3.3 ôC–µ ÷µƒ∞l(f®°)’π⁄ÖÑð
°°°°Æî«∞£¨π§òI(y®®)ôC∆˜»À“—Ωõ(j®©ng)‘⁄÷T∂ýÓI(l®´ng)”Ú±ª π”√£¨”––ßµƒúpµÕ¡À∆ÛòI(y®®)»Àπ§≤Ÿ◊˜µƒŒ£ÎU∏≈¬ £¨Ã·∏þ¡À∆ÛòI(y®®) –àˆ(ch®£ng)∏ÇÝ顶£¨Ω‚õQ¡À“Ú»Àπ§≤Ÿ◊˜‘Ï≥…µƒÜñ(w®®n)Ó}£¨Ã·∏þ¡À◊˜òI(y®®)Ÿ|(zh®¨)¡ø°£»’±æ∫ÕÌn᯵»á¯º““≤È_(k®°i) ºå¢ôC∆˜»À◊˜ûÈ¥ŸþM(j®¨n)…Áï˛(hu®¨ )∞l(f®°)’πµƒ÷˜“™‘¥Ñ”(d®∞ng)¡¶£¨≤¢·òå¶ôC∆˜»À÷∆∂®≥ˆ¡ÀœýÍP(gu®°n)’˛≤þ£¨Õ®þ^(gu®∞)’˛≤þ÷ß≥÷ÅÌ(l®¢i)πƒÑÓ∆ÛòI(y®®)ÜŒŒªèƒ ¬ôC∆˜»Àµƒ…˙Æa(ch®£n)Ω®‘O°£
°°°°þ@–©¥Î ©”––ßµƒ¥ŸþM(j®¨n)¡À∞l(f®°)þ_᯺“µƒôC∆˜»Àºº–g(sh®¥)Ãé”⁄ð^∏þÀÆ∆Ω[23].◊ÓΩ¸ ¿ΩÁ∏˜á¯È_(k®°i)∞l(f®°)‘O”ã≥ˆÅÌ(l®¢i)µƒôC∆˜»À◊ɵ√‘ΩÅÌ(l®¢i)‘Ω÷«ƒÐªØ°¢ƒ£âKªØ£¨ π”√“≤◊ɵ√‘ΩÅÌ(l®¢i)‘Ω∏þ£¨ø…“‘∫Ð∫√µƒÕÍ≥…èÕÎsµƒπ§◊˜°£ì˛’{≤È∞l(f®°)¨F£¨‘⁄Œ¥ÅÌ(l®¢i)µƒôC∆˜»À‘O”ãÓI(l®´ng)”Ú÷–£¨»ÀÇÉå¢÷ÿ¸c(di®£n)å¶ôC∆˜»Àµƒƒ£âKªØþM(j®¨n)––‘O”㣨ծþ^(gu®∞)‘ˆèäôC∆˜»Àƒ£âKπ¶ƒÐµƒª•ìQ–‘ƒÐ£¨ÅÌ(l®¢i)÷∏þôC∆˜»Àºº–g(sh®¥)£¨±£◊CŒ¥ÅÌ(l®¢i)µƒôC∆˜»ÀƒÐâÚþm”√”⁄∏¸∂ý≠h(hu®¢n)æ≥ÓI(l®´ng)”Ú£¨ÃÊ¥˙∏¸∂ý»Àπ§≤Ÿ◊˜[24].
°°°°±æŒƒ·òå¶á¯É»Õ‚ôC∆˜»À∞l(f®°)¨F¨FÝÓ£¨þM(j®¨n)––¡ÀøÇΩY£¨»Áœ¬À˘ æ£∫
°°°°£®1£©π§òI(y®®)ôC∆˜»Àµƒ π”√–‘ƒÐð^ûÈÕª≥ˆ£¨À˘“‘£¨–Ë“™◊ˆ∫√ôC∆˜»Àƒ£âKµƒ‘O”㣨÷∏þôC∆˜»ÀµƒÏ`ªÓ∂»°£
°°°°£®2£©Õ®þ^(gu®∞)þM(j®¨n)“ª≤ΩÈ_(k®°i)∞l(f®°)—–æøôC∆˜»ÀœµΩy£¨ π∆‰≤Ÿ◊˜≤ΩÛE◊ɵ√∏¸º”∫Ü(ji®£n)ùç°¢∂ýò”ªØ°£
°°°°Õ®þ^(gu®∞)‘ˆèäôC∆˜»ÀµƒºØ≥…ªØ∫Õƒ£âKªØ‘O”ã£¨ΩµµÕôC∆˜»Àøÿ÷∆∆˜µƒÉ¶¥Êø’Èg°£
°°°°£®3£©ÎS÷¯(zh®¥)ǘ∏–∆˜ºº–g(sh®¥)µƒ≤ªîý…˝ºâ£¨Ç˜∏–∆˜“—Ωõ(j®©ng)≥…ûÈ¡ÀôC∆˜»ÀœµΩy÷–µƒ÷ÿ“™ΩM≥…≤ø∑÷£¨ƒÐâÚåç(sh®™)¨F嶜یª÷√µƒ’“姰£Õ¨ïr(sh®™)£¨þÄø…“‘胓ª–©∏¸º”∏þ∂ÀµƒôC∆˜»À…Ì…œ∞l(f®°)¨F£¨‘Ωº”∏þ∂ÀµƒôC∆˜»ÀœµΩy π”√µƒÐõº˛∫Õ”≤º˛ºº–g(sh®¥)“≤‘Ω∞l(f®°)èÕÎs°£À˘“‘£¨–Ë“™◊ˆ∫√ôC∆˜»ÀœµΩyµÿπп̣¨≤…ºØ∏˜∑Nîµì˛–≈œ¢ÅÌ(l®¢i)ƒ£îMôC∆˜»Àµƒπ§◊˜≠h(hu®¢n)æ≥£¨“‘±„‘O”ã≥ˆ∑˚∫œ”√ëÙ(h®¥) π”√–Ë«ÛµƒôC∆˜»À°£
°°°°£®4£©ÎS÷¯(zh®¥)ÃìîM¨Fåç(sh®™)ºº–g(sh®¥)µƒ π”√£¨þbøÿôC∆˜»Àø…“‘÷±Ω”Õ®þ^(gu®∞)ǘ∏–∆˜ÅÌ(l®¢i)≤…ºØ–≈œ¢îµì˛£¨≤¢∏˘ì˛¨Fåç(sh®™)÷–≤…ºØµƒ–≈œ¢îµì˛ÅÌ(l®¢i)ƒ£îM≥ˆ“ªÇÄ(g®®)ÃìîMπ§◊˜≠h(hu®¢n)æ≥£¨“‘±„◊åôC∆˜»ÀƒÐâÚ”–÷¯(zh®¥)…Ì≈R∆‰æ≥µƒ∏–”X(ju®¶)°£
°°°°£®5£©”…”⁄þbøÿôC∆˜»Àå¶ë™µƒπ§◊˜ «≤ªîý∞l(f®°)…˙◊ɪصƒ£¨À˘“‘£¨‘⁄þM(j®¨n)––øÿ÷∆œµΩy‘O”ãïr(sh®™)£¨–Ë“™◊ˆ∫√þh≥ÃΩK∂À∫Õ≤Ÿ◊˜’þ÷ÆÈgµƒ»ÀôCª•Ñ”(d®∞ng)Ωªª•øÿ÷∆œµΩyµƒ‘O”㣨¿˝»Á£¨Õ‚ôø’µƒø’ÈgôC∆˜»ÀæÕ «”…¥À—–∞l(f®°)‘O”ã≥ˆÅÌ(l®¢i)µƒ°£
°°°°ôC–µ ÷ΩYò㵃‘O”ã «’˚ÇÄ(g®®)ôC–µ ÷µƒ∫À–ƒ≤ø∑÷£¨À¸µƒ‘O”ãŸ|(zh®¨)¡ø∫√âƒ÷±Ω””∞Ìë÷¯(zh®¥)ôC–µ ÷∞·þ\ŒÔ¡œµƒŸ|(zh®¨)¡ø∫Ֆ߬ °£À˘“‘£¨Õ®≥£«Èõrœ¬£¨‘O”㵃ôC–µ ÷ΩYò㵃 π”√≤Ÿ◊˜∑∂á˙“™¥Û£¨«“æþlj÷¯(zh®¥)“ª∂®µƒ∏þ∂» π”√–‘ƒÐ°£ø…“‘‘⁄èàÈ_(k®°i)◊• ÷µƒ«Èõrœ¬£¨∑≈œ¬ÿõª@£¨±Ð√‚ôC–µ ÷Õ∆≥ˆÿõºÐïr(sh®™)£¨”|≈ˆµΩÿõª@[25].Õ¨ïr(sh®™)£¨”…”⁄ôC–µ ÷ÕÍ≥…“ªÇÄ(g®®)ÕÍ’˚µƒ∞·þ\þ^(gu®∞)≥Ö˓™Ωõ(j®©ng)þ^(gu®∞)∂ý¥Œþ\Ñ”(d®∞ng)≤≈ƒÐâÚåç(sh®™)¨F£¨À˘“‘£¨–Ë“™‘O”ã≥ˆ“ªÇÄ(g®®)∫œ¿ÌµƒôC–µ ÷ΩYò㣨ƒÐâÚ”√”⁄◊•»°ÿõŒÔ∫Õ∑≈œ¬ÿõª@≤Ÿ◊˜£¨þ@∑N‘O”ãø…“‘úpðp∞·þ\π§◊˜¥Œîµ£¨Ã·∏þ∞·þ\ÿõŒÔµƒ–߬ °£”…”⁄Ç}ɶ≠h(hu®¢n)æ≥¥Û∂ýîµ∂º «Ãé”⁄∑‚È]ÝÓëB(t®§i)µƒ£¨À˘“‘£¨‘⁄‘O”ãôC–µ ÷µƒïr(sh®™)∫Ú£¨≤ªƒÐâÚ≤…”√æþljûƒ∫¶Î[ªºµƒÚåÑ”(d®∞ng)∆˜ÅÌ(l®¢i)þM(j®¨n)––∞·þ\£¨±£◊CôC–µ ÷∞·þ\þ^(gu®∞)≥Ã÷–µƒ∞≤»´–‘∫Õ∏þ–ß–‘°£À˘“‘£¨÷ªƒÐâÚþxìÒ π”√ÎäÑ”(d®∞ng)ÚåÑ”(d®∞ng)∆˜ÅÌ(l®¢i)åç(sh®™)¨FôC–µ ÷µƒÚåÑ”(d®∞ng)‘O”ã°£
°°°°1.4 ’쌃—–æøµƒ÷˜“™É»»ð
°°°°±æŒƒ «”…ŒÂÇÄ(g®®)≤ø∑÷ΩM≥…£¨»Áœ¬À˘ æ£∫
°°°°µ⁄“ª’¬£∫æw’ì°£÷˜“™å¶±æŒƒ—–æøµƒ±≥æ∞∫Õ“‚¡xþM(j®¨n)––¡À—–æø∫Õ∑÷Œˆ£¨≤¢å¶á¯É»Õ‚ôC∆˜»Àµƒ∞l(f®°)’πþM(j®¨n)≥ÃþM(j®¨n)––¡ÀΩÈΩB°£»ª∫Û嶌“á¯á¯É»ôC∆˜»À∞l(f®°)’π¨FÝÓþM(j®¨n)––¡À’f(shu®≠)√˜£¨≤¢ª˘”⁄Œ“á¯Ω¸é◊ƒÍµƒ∞l(f®°)’πÝÓëB(t®§i)£¨å¶Œ“á¯ôC∆˜»Àºº–g(sh®¥)µƒ∞l(f®°)’π◊ˆ≥ˆÓAúy°£◊Ó∫Û£¨þÄ嶱挃µƒÍP(gu®°n)ÊIºº–g(sh®¥)þM(j®¨n)––¡ÀÍU ˆ°£
°°°°µ⁄∂˛’¬£∫œýÍP(gu®°n)¿Ì’ì≈cºº–g(sh®¥)£¨ΩY∫œæþÛwµƒºº–g(sh®¥)≠h(hu®¢n)æ≥∫ÕÐõº˛ºº–g(sh®¥)£¨þM(j®¨n)––∑÷Œˆ£¨ûÈœ¬Œƒ÷–µƒþM(j®¨n)“ª≤Ω—–æø÷π©¿Ì’ì≈cºº–g(sh®¥)ª˘µA°£
°°°°µ⁄»˝’¬£∫ôC–µ ÷µƒøÇÛw∑Ω∞∏‘O”ã°£÷˜“™å¶ôC–µ ÷µƒ∏˜ÇÄ(g®®)ΩM≥…≤ø∑÷þM(j®¨n)––¡À—–æø∫Õ’f(shu®≠)√˜£¨≤¢å¶ôC–µ ÷µƒþ\Ñ”(d®∞ng)þ^(gu®∞)≥Ã∫Õ∞·þ\ÿõŒÔµƒþ^(gu®∞)≥ÃþM(j®¨n)––¡ÀÍU ˆ°£Õ¨ïr(sh®™)£¨ª˘”⁄ôC–µ ÷µƒåç(sh®™)ÎHπ§◊˜≠h(hu®¢n)æ≥∫Õ π”√π¶ƒÐ–Ë«ÛÅÌ(l®¢i)÷∆∂®≥ˆø∆åW(xu®¶)µƒÚåÑ”(d®∞ng)∑Ω∞∏°£
°°°°µ⁄Àƒ’¬£∫ôC–µ ÷”≤º˛‘O”ã°£÷˜“™å¶ôC–µ ÷µƒ ÷±€ΩYòãΩM≥…≤ø∑÷þM(j®¨n)––—–æø°£Õ¨ïr(sh®™)£¨þÄå¶ôC–µ ÷µƒ ÷±€ªÓÑ”(d®∞ng)∑∂á˙þM(j®¨n)––ΩÈΩB£¨“‘±„þM(j®¨n)––ôC–µ ÷◊• ÷ΩYò㵃‘O”㣨±£◊C◊• ÷∫Õÿõª@Ãé”⁄∫œ¿ÌŒª÷√°£
°°°°µ⁄ŒÂ’¬£¨ôC–µ ÷Ðõº˛œµΩy‘O”ã°£÷˜“™å¶ôC–µ ÷µƒ PLC øÿ÷∆œµΩyþM(j®¨n)––¡À‘îºöµƒ∑÷Œˆ∫Õ’f(shu®≠)√˜£¨≤¢å¶øÿ÷∆œµΩy÷–µƒÎä¬∑ÍP(gu®°n)œµþM(j®¨n)––’f(shu®≠)√˜°£◊Ó∫Û£¨å¶ôC–µ ÷µƒÚåÑ”(d®∞ng)œµΩyþM(j®¨n)––¡À∫Ü(ji®£n)“™µƒ∑÷Œˆ°£
°°°°µ⁄¡˘’¬£¨ôC–µ ÷œµΩyµƒ∑¬’Ê≈cúy‘ᣨ π”√¡À Matlab ∑¬’ÊÐõº˛å¶œµΩyµƒôC–µ ÷øÿ÷∆œµΩyµƒþ\Ñ”(d®∞ng)þM(j®¨n)––∑¬’Ê—–æø£¨Ωõ(j®©ng)þ^(gu®∞)Úû◊Cø…÷™£¨ôC–µ ÷ƒÐâÚ∏˘ì˛œýÍP(gu®°n)÷∏¡ÓÕÍ≥…œý뙵ƒ≤Ÿ◊˜°£
°°°°◊Ó∫ÛûÈΩY’ì≈c’πÕ˚£¨
°°°°µ⁄∂˛’¬ œýÍP(gu®°n)¿Ì’ì≈cºº–g(sh®¥)
°°°°2.1 PLC ∏≈ ˆ
°°°°2.1.1 PLC µƒª˘±æøÚºÐ
°°°°2.1.2 PLC µƒÃÿ–‘
°°°°2.1.3 PLC µƒë™”√
°°°°2.2 Matlab
°°°°2.3 ±æ’¬–°ΩY
°°°°µ⁄»˝’¬ ôC–µ ÷µƒøÇÛw‘O”ã
°°°°3.1 π§◊˜‘≠¿Ì
°°°°3.2 ôC–µ ÷µƒþ\Ñ”(d®∞ng)∑÷Œˆ
°°°°3.3 ôC–µ ÷µƒøÿ÷∆œµΩy
°°°°3.4 ±æ’¬–°ΩY
°°°°µ⁄Àƒ’¬ ôC–µ ÷”≤º˛‘O”ã
°°°°4.1 œµΩyÎä‘¥ƒ£âK
°°°°4.2 ÎäôCÚåÑ”(d®∞ng)ƒ£âK
°°°°4.3 ÷˜øÿÜŒ‘™ƒ£âK
°°°°4.4.1 îµì˛É¶¥Êƒ£âK
°°°°4.4.2 èÕŒªƒ£âK
°°°°4.4.3 æé¥a∆˜ƒ£âK
°°°°4.4.4 ¥Æø⁄∆¡ÚåÑ”(d®∞ng)ƒ£âK
°°°°4.4.5 ôzúyƒ£âK
°°°°4.4 ôC–µ ÷‘O”ã
°°°°4.4.1 ôC–µ ÷±€ΩYòã‘O”ã
°°°°4.4.2 ôC–µ ÷◊• ÷‘O”ã
°°°°4.4.3 ôC–µ ÷ÚåÑ”(d®∞ng)—b÷√‘O”ã
°°°°4.5 ±æ’¬–°ΩY
°°°°µ⁄ŒÂ’¬ ôC–µ ÷øÿ÷∆Ðõº˛‘O”ã
°°°°5.1 øÿ÷∆œµΩyµƒ’˚Ûw‘O”ã
°°°°5.2 PLC øÿ÷∆Îä¬∑
°°°°5.2.1 PLC øÿ÷∆ÎäÑ”(d®∞ng)Õ∆óU
°°°°5.2.2 PLC øÿ÷∆≤ΩþM(j®¨n)ÎäôC
°°°°5.2.3 PLC øÿ÷∆÷±¡˜ÎäôC
°°°°5.3 þ\Ñ”(d®∞ng)øÿ÷∆ƒ£âK
°°°°5.3.1 ÎäôCÚåÑ”(d®∞ng)ƒ£âK
°°°°5.3.1 Ã𖌺”úpÀŸƒ£âK
°°°°5.3.3 S –Œ«˙æÄ(xi®§n)º”úpÀŸƒ£âK
°°°°5.3.4 ∂ýðS¬ì(li®¢n)Ñ”(d®∞ng)ƒ£âK
°°°°5.4 ÷˜øÿÜŒ‘™ƒ£âK
°°°°5.4.1 æé¥a∆˜ƒ£âK
°°°°5.4.2 èÕŒªƒ£âK
°°°°5.5 ±æ’¬–°ΩY
°°°°µ⁄¡˘’¬ ôC–µ ÷œµΩy∑¬’Ê≈cúy‘á
°°°°6.1 ∑¬’Ê∑÷Œˆ
°°°°6.2 Ðõº˛úy‘á
°°°°6.2.1 þ\Ñ”(d®∞ng)úy‘á
°°°°6.2.2 Œª“∆øÿ÷∆úy‘á
°°°°6.3 ôC–µ ÷œµΩyë™”√‘uÉr(ji®§)
°°°°6.4 ±æ’¬–°ΩY
°°°°µ⁄∆þ’¬ ΩY’ì≈c’πÕ˚
°°°°7.1 ΩY’ì
°°°°±æŒƒå¢“ª∑N÷«ƒÐÇ}ɶ∞·þ\ôC–µ ÷±€‘O”ã≤¢åç(sh®™)¨F£¨“‘∞—◊‘Ñ”(d®∞ng)ªØÇ}éÏ÷–µƒÿõŒÔ∞·þ\π§◊˜”Ë“‘ÕÍ≥…£¨∆‰÷–£¨∑¬’Ê∑÷Œˆ°¢‘O”ãÚåÑ”(d®∞ng)—b÷√°¢‘O”ãøÿ÷∆œµΩy“‘º∞‘O”ãôC–µ ÷±€µƒøںР«±æŒƒµƒ÷˜“™É»»ð°£Õ®þ^(gu®∞)æþÛwµÿ‘O”ã≈c—–æøŒ“ÇÉ墓‘œ¬ΩY’ì”Ë“‘µ√≥ˆ£∫
°°°°1°¢å¶’nÓ}—–æøµƒ±≥æ∞°¢—–æø“‚¡x“‘º∞Æî«∞á¯É»Õ‚µƒ—–æø¨FÝÓþM(j®¨n)––¡ÀΩ‚∫Û£¨Œ“∞—墱挃”ãÑù‘O”ãåç(sh®™)¨Fµƒ÷«ƒÐÇ}ɶ∞·þ\ôC–µ ÷±€µƒ’˚Ûw∑Ω∞∏”Ë“‘÷≥ˆ£¨Õ¨ïr(sh®™)嶜µΩyøںеƒòã≥…É»»ðþM(j®¨n)––¡À∑÷Œˆ£¨ÕÍ≥…¡À◊‘Ñ”(d®∞ng)ªØÇ}éÏÉ»ôC–µ ÷±€µƒπ§◊˜¡˜≥õƒ‘O”㣪¥ÀÕ‚£¨Œ“þÄæþÛwµÿ∑÷Œˆ¡ÀôC–µ ÷±€µƒþ\Ñ”(d®∞ng)þ^(gu®∞)≥㨓‘π¶ƒÐ–Ë«Û≈cπ§◊˜≠h(hu®¢n)æ≥ûȪ˘µA嶱»∑÷Œˆ¡ÀÚåÑ”(d®∞ng)µƒ∑Ω Ω£¨◊ÓΩK∞—∫œþmµƒÚåÑ”(d®∞ng)∑Ω∞∏þx»°≥ˆÅÌ(l®¢i)°£±æŒƒþÄå¶øÿ÷∆œµΩyµƒ’˚Ûw‘O”ã∑Ω∞∏þM(j®¨n)––¡ÀΩÈΩB°£
°°°°2°¢æþÛwµÿ‘O”ã≤¢∑÷Œˆ¡ÀôC–µ ÷±€µƒ∫À–ƒΩMº˛£¨‘O”ãÕÍ≥…¡ÀôC–µ ÷±€µƒøںУ¨≤¢«“å¶∞·þ\π§◊˜þ^(gu®∞)≥Ã÷–ôC–µ ÷±€µƒþ\Ñ”(d®∞ng)∑∂á˙þM(j®¨n)––¡À∑÷Œˆ£¨“‘嶒˚ÇÄ(g®®)Ç}éÏÛwœµµƒÀ˘”–≤øº˛µƒÖf(xi®¶)’{π§◊˜Ñì(chu®§ng )‘Ïø…ƒÐ–‘£ª»ª∫Ûå¶ôC–µ ÷±€◊• ÷µƒøںБO”ãþM(j®¨n)––¡ÀΩÈΩB£¨≤¢å¶◊• ÷≈cÿõŒÔª@µƒ≥þ¥Á∫ÕŒª÷√ÍP(gu®°n)œµ“‘º∞ôC–µ ÷±€◊• ÷µƒ С¶«ÈõrþM(j®¨n)––¡À∑÷Œˆ£ª◊Ó∫ÛæþÛwµÿ‘O”ã¡ÀôC–µ ÷±€µƒÚåÑ”(d®∞ng)—b÷√£¨≤¢ÕÍ≥…¡ÀÎäôC≈cÎäÑ”(d®∞ng)Õ∆óUµƒþx–Õπ§◊˜“‘º∞ С¶∑÷Œˆπ§◊˜°£
°°°°3°¢·òå¶ôC–µ ÷øÿ÷∆œµΩyþM(j®¨n)––¡À‘O”㣨å¶öWƒ∑˝àπ´À浃 CP1H œµ¡– PLC þM(j®¨n)––ë™”√ÕÍ≥…¡ÀôC–µ ÷µƒøÿ÷∆π¶ƒÐ£ª¥ÀÕ‚£¨þÄ·òå¶ôC–µ ÷±€øÿ÷∆œµΩyµƒÐõº˛þM(j®¨n)––¡ÀæþÛw‘O”ã°£
°°°°4°¢å¢þ\Ñ”(d®∞ng)∑¬’Ê∑÷Œˆþ^(gu®∞)≥Ãë™”√”⁄ôC–µ ÷±€÷–£¨“‘∑¬’ʃ£–Õµƒ∑÷ŒˆΩYπ˚ûÈ“¿ì˛å¶ôC–µ ÷±€ø…“‘ÕÍ≥…µƒ∞·þ\π§◊˜þM(j®¨n)––¡À√˜¥_°£
°°°°7.2 ’πÕ˚
°°°° Мޔ⁄πP’þµƒïr(sh®™)Èg≈cƒÐ¡¶£¨±æŒƒµƒ—–æøþÄ”–“ª–©Üñ(w®®n)Ó}”–¥˝Ω‚õQ£¨Œ“å¢ï˛(hu®¨ )‘⁄∫Û¿mµƒ—–æøπ§◊˜÷–å¶þ@–©Üñ(w®®n)Ó}þM(j®¨n)––Ω‚õQ°£
÷¬ ÷x
°°°°ïr(sh®™)π‚Ôw ≈£¨»Á∞◊Òxþ^(gu®∞)œ∂£¨ÎS÷¯(zh®¥)’쌃µƒº¥å¢ÕÍ≥…£¨Œ“µƒ’˚ÇÄ(g®®)Îä◊”ø∆ºº¥ÛåW(xu®¶)π§≥Ã¥T ø—–æø…˙µƒåW(xu®¶)…˙º¥å¢ΩY ¯°£
°°°°≈¨¡¶¡Àå¢Ω¸“ªƒÍïr(sh®™)ÈgŒ“µƒ¥T øÆÖòI(y®®)’쌃º¥å¢ÕÍ∏£¨‘⁄þ@∫Õ“ªƒÍ“‘ÅÌ(l®¢i)Œ“µ√µΩ¡Àüo(w®≤)œéüµƒÍP(gu®°n)–ƒ∫ÕéÕ÷˙£¨‘⁄þ@¿ÔŒ““™œÚÀ˚ÇɱÌþ_Œ“…Ó…Óµƒ÷x“‚°£
°°°° ◊œ»£¨Œ““™…Ó…Óµƒ∏–÷xµƒ «Œ“µƒ‘⁄–£åßéü¬∑÷æÑÇ¿œéü£¨¬∑¿œéüåW(xu®¶)◊RúY≤©£¨±Ú±Ú”–∂Y£¨á¿÷÷ŒåW(xu®¶)æ´…Òº∞∏þ…–µƒéü’þÔL(f®•ng)∑∂…Ó…Óµƒ”∞Ìë÷¯(zh®¥)Œ“°£‘⁄’쌃µƒþxÓ}°¢ŸY¡œµƒÀ—ºØ∫Ւ쌃µƒåë(xi®ß)◊˜µƒÎA∂Œ£¨¬∑¿œéü∂ºÉA◊¢¡ÀòO¥ÛµƒÍP(gu®°n)–ƒ°¢πƒÑÓ∫Õ÷∏åß°£¬∑¿œéü嶌“µƒÍP(gu®°n)œµ∫ÕΩÃ’dŒ“墔¿þh„ë”õ”⁄–ƒ°£
°°°°∆‰¥Œ£¨Œ““™∏–÷xµƒ «Œ“µƒ∆ÛòI(y®®)∑Ωåßéü≥…∂º√À…˝Îä◊”π´À浃óÓÔwπ§≥Ãéü£¨óÓ¿œéü÷™◊RúY≤©£¨åç(sh®™)€`ƒÐ¡¶≥¨è䣨ºº–g(sh®¥)ÀÆ∆Ωþ^(gu®∞)”≤£¨÷∏åß¡À∫Ð∂ý¥Û–Õ’nÓ}£¨óÓ¿œéü «Œ“åW(xu®¶)¡ïµƒ∞Òò”°£‘⁄’˚ÇÄ(g®®)’쌃µƒåë(xi®ß)◊˜þ^(gu®∞)≥Ã÷–£¨óÓ¿œéü嶌“þM(j®¨n)––¡À∑«≥£ƒÕ–ƒµƒ÷∏åߣ¨Õ∆≥ˆ¡À∫Ð∂ýåöŸFµƒ“‚“ä(ji®§n)£¨ πµ√Œ“µƒ’쌃ƒÐâÚð^∏þŸ|(zh®¨)¡øµƒÕÍ≥…£¨‘⁄¥Àå¶óÓ¿œéü±Ì æ…Ó…Óµƒ∏–÷x°£
°°°°Õ¨ïr(sh®™)£¨Œ““≤∑«≥£∏–÷x‘⁄—–æø…˙åW(xu®¶)¡ïþ^(gu®∞)≥Ã÷–µƒÀ˘”–¿œéü∫ÕÍP(gu®°n)–ƒ÷ß≥÷éÕ÷˙Œ“µƒåW(xu®¶)–£ÓI(l®´ng)åß°¢∏–÷x¬°˚ê∆º¿œéü°¢∏–÷xèàÁäʺ¿œéü∫ÕŒƒ”°÷––ƒµƒÀ˘”–π§◊˜»ÀÜT£¨ «ƒ„ÇɵƒéÕ÷˙◊匓Ìò¿˚ÕÍ≥…¡À’쌃µƒ◊´åë(xi®ß)£¨ΩË¥ÀôCï˛(hu®¨ )£¨÷îœÚƒ„ÇÉ±Ì æ…Ó…Óµƒ÷x“‚£°
°°°°Ö¢øºŒƒ´I
°°°°[1]A V Pilipenko,A S Vetrov,A Y Pilipenko,N V Goncharova. Development of a manipulatorcontrol system via the Internet[J]. IOP Conference Series: Materials Science andEngineering,2019,516£®1£© :13-21.
°°°°[2]Fan XU,Jin WANG,Guo-dong LU.Adaptive robust neural control of a two-manipulator systemholding a rigid object with inaccurate base frame parameters[J].Frontiers of InformationTechnology & Electronic Engineering,2018,19£®11£©£∫1316-1327.
°°°°[3] ⁄w Ë° , ≈·∑ΩÍ… , Ã’ù…”¬ . ≥¨¬ïôz úy ∂ý ðS ôC –µ ÷ þ\ Ñ”(d®∞ng) øÿ ÷∆ œµ Ωy —– æø [J]. π§ òI(y®®) øÿ ÷∆ ”ã À„ôC£¨2019,32£®01£©£∫1-5.
°°°°[4]‘¨–°ï˛(hu®¨ )£¨≤ÓðÔw£¨Ñ¢πª®£¨∏∂æÍæÍ£¨Ñ¢–°åé°£ôC–µ ÷ö‚Ñ”(d®∞ng)≥ÖÚö‚øÿœµΩy∏…î_–≈Ãñ∑÷Œˆº∞Ãé¿Ì[J].ôC–µπ§≥Ãéü£¨2019£®03£©£∫99-100.
°°°°[5] –§Ñ¶Ãm , “◊ „ë , ¡_ ∏˝ ≈d . …˙ Æa(ch®£n) æÄ(xi®§n) ∞· þ\ ôC –µ ÷ Îä ö‚ øÿ ÷∆ œµ Ωy µƒ ‘O ”ã [J]. ôC Îä π§ ≥à ºº–g(sh®¥)£¨2019,48£®03£©£∫20-23.
°°°°[6]. System Dynamics; Study Findings from University of Sfax Provide New Insights into SystemDynamics £®Adaptive motion/force control of uncertain nonholonomic mobile manipulator withestimation of unknown external force£©[J]. Science Letter,2018,12£®22£©£∫13-21.
°°°°[7]Zhang Yuling,Gu Yongxia,Liu Tao,Zhao Jieliang,Yan Shaoze. Dynamic behavior and parametersensitivity of the free-floating base for space manipulator system considering joint flexibilityand clearance[J]. Proceedings of the Institution of Mechanical Engineers,2019,233£®3£© :13-21.
°°°°[8]Jun Xia,Yujia Zhang,Chenguang Yang,Min Wang,Andy Annamalai. An improved adaptiveonline neural control for robot manipulator systems using integral Barrier Lyapunovfunctions[J]. International Journal of Systems Science,2019,50£®3£©£∫11-21.
°°°°[9]Abdulkareem Alasli,Levent ?etin,Nail Ak?ura,Ayta? Kahveci,Fatih Cemal Can,?zgür Tamer.Electromagnet Design for Untethered Actuation System Mounted on Robotic Manipulator[J].Sensors & Actuators: A. Physical,2018,11£®22£©£∫13-21.
°°°°[10]Dmitrii Dobriborsci,Sergey Kolyubin,Alexei Margun. Robust control system for parallelkinematics robotic manipulator ? ? This work is supported by the Russian Science Foundationgrant £®project 17-79-20341£©[J]. IFAC PapersOnLine,2018,51£®22£©£∫13-21.
°°°°[11]Shelley A. Adamo. Turning your victim into a collaborator: Exploitation of insect behaviouralcontrol systems by parasitic manipulators[J]. Current Opinion in Insect Science,2019,12£®10£©£∫13-17.
°°°°[12]Ling Zhao,Xin Liu,Tao Wang. Trajectory tracking control for double-joint manipulator systemsdriven by pneumatic artificial muscles based on a nonlinear extended state observer[J].Mechanical Systems and Signal Processing,2019,122:12-16.
°°°°[13]Y. Yang,C. Hua,X. Guan. Multi©\manipulators coordination for bilateral teleoperation systemusing fixed ©\ time control approach[J]. International Journal of Robust and NonlinearControl,2018,28£®18£©£∫11-13.
°°°°[14]Zelun Li. Design of A Spin-coating Used Manipulator[A]. ≤©ÀºåW(xu®¶)–g(sh®¥)Ωª¡˜÷––ƒ°£Proceedings ofthe 2nd International Seminar on Artificial Intelligence, Networking and InformationTechnology£®ANIT 2018£©[C].≤©ÀºåW(xu®¶)–g(sh®¥)Ωª¡˜÷––ƒ£∫…œ∫£Û„”ðŒƒªØǘ≤•”–œÞπ´À棨2018:4-12.
°°°°[15]Xinming Hou,Yanhua Lei,Hongtao Yu,Yan Bao. Adaptive Fuzzy Hi Robust Control forManipulators in MIMO Systems[P]. 8th International Conference on Management andComputer Science £®ICMCS 2018£©£¨2018.
°°°°[16] óÓ »◊ , Ñ¢ Ω ÷¶ , ø◊≥øº— . º“ æþ òI(y®®) áä ∆· ôC –µ ÷ œµ Ωy µƒ ‘O ”ã ≈c —– æø [J]. ÷– ᯠ‘O lj π§≥ã¨2017£®19£©£∫110-112.
°°°°[17]¿ÓÅÜ¿•°£ª˘”⁄ PLC µƒ“∫â∫ôC–µ ÷œµΩy‘O”ã[J].√∫µVôC–µ£¨2017,38£®05£©£∫167-169.
°°°°[18]“◊ûI¡÷°£ ’þ\Ðá(ch®•)ôC–µ ÷œµΩy∏ƒþM(j®¨n)‘O”ã≈côCòã∑÷Œˆº∞Éû(y®≠u)ªØ[D].∫˛ƒœ¥ÛåW(xu®¶)£¨2017.
°°°°[19]∞≤‚è÷•°£ ôC–µ ÷◊‘þm뙃£∫˝øÿ÷∆∑Ω∑®—–æø[D].Œ˜ƒœ ؔեÛåW(xu®¶)£¨2017.
°°°°[20]èàñ|œˆ°£ ª˘”⁄™ö¡¢ƒ£ëB(t®§i)ø’Ègøÿ÷∆∑Ω∑®µƒ∫£¥≤ Ω»°–æ„@ôCøÿ÷∆œµΩy—–æø[D].÷–᯵ÿŸ|(zh®¨)¥ÛåW(xu®¶)£¨2017.
°°°°[21]∫ÙÑÇ¡x£¨óÓ–¬ÑÇ£¨ÍP(gu®°n)–€Ôw£¨Õı…pÐ∞°£“ª∑N PLC øÿ÷∆µƒŒÔ¡œΩªΩ”»·–‘ôC–µ ÷œµΩy[J].÷∆‘ÏòI(y®®)◊‘Ñ”(d®∞ng)ªØ£¨2017,39£®04£©£∫121-124.
°°°°[22] åOΩ≠≤® , Õı ¥‰ , «G èä . ÊV∫œΩ≤ƒŸ|(zh®¨)÷«ƒÐôC–µ ÷œµΩyµƒÈ_(k®°i)∞l(f®°)≈c‘O”ã [J]. ¿ΩÁ”–…´Ω埣¨2016£®19£©£∫183+185.
°°°°[23]ªÙûÿ£¨¿Ó§£¨èຓè䣨ÒR∫’£¨Íêù…”¬£¨Ñ¢Ê∫ÁÊ°£ø⁄∑˛“∫…˙Æa(ch®£n)æÄ(xi®§n)∞·þ\ôC–µ ÷œµΩy‘O”ã[J].—blj÷∆‘Ϻº–g(sh®¥)£¨2015£®07£©£∫245-246.
°°°°[24]ÀŒ√˜√ƒ£¨ÀŒ√˜√˜£¨ýçæSΩУ¨èàÑ≈À…£¨èàþM(j®¨n)°£ƒ≥–Õ≤Ò”ÕôCÎäÂÉôC–µ ÷œµΩyµƒ‘O”ã≈cΩ®ƒ£[J].É»»ºôC≈c≈‰º˛£¨2015£®06£©£∫12-14.
°°°°[25]Ñ¢åW(xu®¶)Œƒ°£ª˘”⁄ PLC µƒÀ≈∑˛ôC–µ ÷øÿ÷∆œµΩy‘O”ã[J].—blj÷∆‘Ϻº–g(sh®¥)£¨2015£®03£©£∫69-71.
°°°°[26]–˚◊‘—Û£¨Íêï¯(sh®±)∫Í£¨≥£ÑP°£ª˘”⁄ PLC øÿ÷∆µƒ◊ÉÀŸ∆˜∞·þ\ôC–µ ÷œµΩy‘O”ã[J].÷∆‘ÏòI(y®®)◊‘Ñ”(d®∞ng)ªØ£¨2015,37£®04£©£∫6-8.
°°°°[27]Õıµ¬÷æ°£ª˘”⁄ PLC øÿ÷∆ôC–µ ÷œµΩy‘O”㵃È_(k®°i)∞l(f®°)[J].ø∆ººÔL(f®•ng)£¨2015£®01£©£∫73.
°°°°[28]Íë≥ø∑º£¨…£æߣ¨Õıè䣨∑∂ ¿œÈ£¨‘Sµ¬Á˜°£„~πÐÛwå£(zhu®°n)ôC◊‘Ñ”(d®∞ng)…œœ¬¡œôC–µ ÷—–æø≈cÈ_(k®°i)∞l(f®°)[J].Îä◊”úy‘ᣨ2015£®02£©£∫101-103.
°°°°[29]Ñ¢ºtœ»°£ª˘”⁄ PLC øÿ÷∆µƒö‚Ñ”(d®∞ng)∞·þ\ôC–µ ÷œµΩy‘O”ã[J].ôC–µπ§≥Ãéü£¨2014£®09£©£∫124-126.
°°°°[30]Ò˚æÍ°£ª˘”⁄ PLC µƒÎpðSôC–µ ÷œµΩy‘O”ã[J].◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)≈cë™”√£¨2014,33£®08£©£∫57-60.
°°°°[31]”Œ÷–ᯰ£ª˘”⁄ PLC µƒ∂ýƒ£ Ωπ§òI(y®®)ôC–µ ÷œµΩy‘O”ã[J].∫⁄˝àΩ≠ø∆ºº–≈œ¢£¨2014£®21£©£∫57.
°°°°[32]÷x”Ó°£√∫µVÇ}ɶ∞·þ\ôC–µ ÷ PLC øÿ÷∆œµΩy‘O”ã[J].√∫µVôC–µ£¨2014,35£®07£©£∫234-236.
°°°°[33]Ñ¢ÀÆ∆Ω£¨óÓâ€÷«°£ª˘”⁄ PLC ≈c≤ΩþM(j®¨n)ÎäôCµƒΩÃåW(xu®¶)–ÕôC–µ ÷œµΩy‘O”ã[J].◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)≈cë™”√£¨2014,33£®04£©£∫103-106.
°°°°[34]‘¿ñ|∫£°£∂˛òOπÐ∞·þ\ôC–µ ÷œµΩy‘O”ã[J].÷∆‘ÏòI(y®®)◊‘Ñ”(d®∞ng)ªØ£¨2014,36£®08£©£∫144-145+149.
°°°°[35] Íê ér , ÷Ï ∑ .CZC-1 –¬–Õ∆¨Ýӌԡœ◊•»°ØB∆¨ôCôC–µ ÷œµΩy‘O”ã [J]. ≥∆∑≈côC–µ£¨2014,30£®02£©£∫88-90.
°°°°[36]–Ï˚ê¥∫°£◊‘Ñ”(d®∞ng)…œœ¬¡œÕ®”√ôC–µ ÷œµΩy‘O”ã≈c—–æø[J].“∫â∫≈cö‚Ñ”(d®∞ng)£¨2013£®08£©£∫83-86.
°°°°[37]Íê§£¨Òò√Ù÷€£¨⁄wΩ≠∫££¨¡ËÀ…°£ª˘”⁄ PLC ¥Û––≥Ã÷ÿðdôC–µ ÷µƒøÿ÷∆œµΩy‘O”ã[J].◊‘Ñ”(d®∞ng)ªØ≈cÉx∆˜Éx±Ì£¨2013£®03£©£∫60-62.
°°°°[38]Õı¿Ú¿Ú°£ª˘”⁄ PLC øÿ÷∆µƒö‚Ñ”(d®∞ng)∞·þ\ôC–µ ÷œµΩy‘O”ã[J].Îä◊”ø∆ºº£¨2013,26£®04£©£∫50-52.
°°°°[39]≥£√Á√Á°£»˝¡‚ PLC øÿ÷∆µƒôC–µ ÷œµΩy‘O”ã[J].Îä◊”÷∆◊˜£¨2013£®08£©£∫207.
°°°°[40]≤ÃæS£¨ ∑”Ò∑£¨¡Œ”ÓÃm£¨¿Ó≈ÛÇ•£¨ÍêÍñ(y®¢ng)£¨ÕıÅÜ¿§£¨Õıù˝°£ª˘”⁄ PLC µƒÐá(ch®•)ðdæ∆æ´ôzúy÷«ƒÐôC–µ ÷œµΩy‘O”ã[J].¥Û±äø∆ºº£¨2013,15£®03£©£∫59-61.
°°°°[41]’≤ᯱ¯£¨Õı√Ù°£ª˘”⁄ S7-300 PLC µƒ»·–‘ÀÕ¡œôC–µ ÷œµΩy‘O”ã[J].Ω≠ÃKΩ®÷˛¬öòI(y®®)ºº–g(sh®¥)åW(xu®¶)‘∫åW(xu®¶)àÛ£¨2012,12£®04£©£∫28-31.
°°°°[42]÷x˚꣨֫èà”¿£¨Ö«œ≤°£ª˘”⁄ PLC øÿ÷∆µƒö‚Ñ”(d®∞ng)ôC–µ ÷œµΩy‘O”ã[J].–¬ºº–g(sh®¥)–¬π§Àᣨ2012£®11£©£∫48-50.
°°°°[43]Õı–Ò°£ª˘”⁄ PLC øÿ÷∆µƒôC–µ ÷œµΩy‘O”ã[J].ôCÎä–≈œ¢£¨2012£®18£©£∫138-139.
°°°°[44]Õı‘¬«€°£ª˘”⁄ PLC µƒôC–µ ÷øÿ÷∆œµΩy‘O”ã[J].“∫â∫≈cö‚Ñ”(d®∞ng)£¨2011£®09£©£∫41-43.
°°°°[45]∫˙‘∆Ã√£¨Ω≠◊øþ_°£∂ý◊‘”…∂»»·–‘…˙Æa(ch®£n)æÄ(xi®§n)ÀÕ¡œôC–µ ÷œµΩy‘O”ã[J].“∫â∫≈cö‚Ñ”(d®∞ng)£¨2011£®06£©£∫45-47.
°°°°[46] ÀŒ √˜ åW(xu®¶) . ª˘”⁄À…œ¬ PLC √} õ_ øÿ ÷∆ ôC –µ ÷ œµ Ωy µƒ ‘O ”ã [J]. ôC Îä π§ ≥à ºº–g(sh®¥)£¨2010,39£®09£©£∫37-39+82+113-114.
°°°°[47]÷ЯôΩУ¨Òò√Ù÷€£¨¿Óù˝£¨–Ï¡÷…≠£¨∫˙ï‘æÍ°£ª˘”⁄ PLC µƒπ§òI(y®®)»°¡œôC–µ ÷œµΩy‘O”ã[J].π§òI(y®®)Éx±Ì≈c◊‘Ñ”(d®∞ng)ªØ—b÷√£¨2010£®03£©£∫50-52+57.
°°°°[48]Àæ’˘i£¨≤ÐŒ˜æ©£¨Ω™–°∑≈°£’Êø’Œ¸∏Ω ΩôC–µ ÷œµΩy‘O”ã[J].∞¸—b≈c ≥∆∑ôC–µ£¨2009,27£®06£©£∫26-30.
°°°°[49]Óô¡¢÷棨≈£á¯¡·£¨ªÙ∆G÷“°£≥« –œ¬ÀƵ¿«Â”Ÿ“∆Ñ”(d®∞ng) ΩôC–µ ÷œµΩy‘O”ã[J].»AÉS¥ÛåW(xu®¶)åW(xu®¶)àÛ£®◊‘»ªø∆åW(xu®¶)∞Ê£©£¨2009,30£®01£©£∫12-15.
°°°°[50]óÓ–Ò£¨¿Ó¡¡”Ò£¨¿ÓåW(xu®¶)ŸF£¨‘¿Ω®‰h°£»˝æSºèøóèÕ∫œ≤ƒ¡œøp∫œôC–µ ÷œµΩy--ƒ©∂ÀôCò㵃‘O”ã≈c¿Ì’ì∑÷Œˆ[J].…œ∫£ΩªÕ®¥ÛåW(xu®¶)åW(xu®¶)àÛ£¨2008£®S1£©£∫175-178.
£®»Áƒ˙–Ë“™≤Èø¥±æ∆™ÆÖòI(y®®)‘O”ã»´Œƒ£¨’àƒ˙¬ì(li®¢n)œµøÕ∑˛À˜»°£©