24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
24–°ïr(sh®™)’쌃∂®÷∆ü·æÄ(xi®§n)
°°°°’™ “™
°°°°U –Õ‰ìπ‹ «”…ºöÈL(ch®¢ng)µƒ÷±æÄ(xi®§n)‰ìπ‹Õ®fl^(gu®∞)èùπ‹π§ÀΈèù∂¯≥…µƒ,‘⁄ü·ΩªìQ∆˜µ»‘Olj…œ”–÷¯(zh®¥)èV∑∫µƒë™”√.±æ’nÓ}·ò嶑≠¿‰èù¨Fàˆ(ch®£ng)±ø÷ÿµƒ∞·fl\»°¡œ‘Olj–Ë“™∏¸ìQµƒÜñ(w®®n)Ó},‘O”ãÈ_(k®°i)∞l(f®°)“ªÃ◊›p±„«“◊‘Ñ”(d®∞ng)ªØ≥Ã∂»∏flµƒ◊•»°∞·fl\ôC–µ ÷,≤ªÉH÷∏fl¡À¿‰èùπ§Àᵃ…˙Æa(ch®£n)–߬ ,∂¯«“ΩµµÕ¡Àπ§»ÀÑ⁄Ñ”(d®∞ng)èä∂»∫Õ»Àπ§≥…±æ.
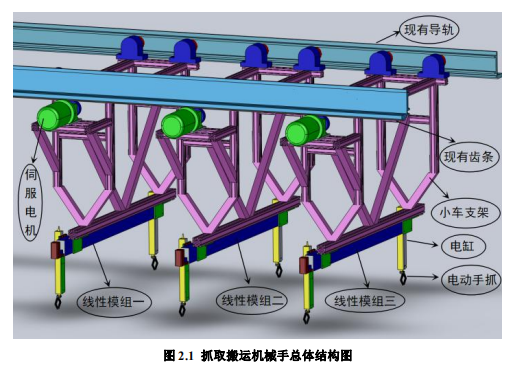
°°°°±æŒƒ‘⁄¡ÀΩ‚‘≠ÅÌ(l®¢i)èùπ‹π§Àá∫Õ»°¡œôCò㵃ª˘µA…œ,·òå¶≤ªÕ¨“é∏Òµƒ U –Õ‰ìπ‹(èùπ‹∞ÎèΩ 0.2m~1.2m,èùπ‹π‹ƒ_ÈL(ch®¢ng)∂» 0.3m~1.4m).¿˚”√‘≠»°¡œ‘Oljµƒ‹á(ch®•)›Ü°¢‹âµ¿∫Õ˝Xól,òãΩ®»˝ÇÄ(g®®)–°‹á(ch®•)Õ¨‹â,√øÇÄ(g®®)–°‹á(ch®•)æ˘≤…”√É…÷ªôC–µ ÷◊¶µƒ◊•»°∞·fl\ôC–µ ÷∑Ω∞∏.ôC–µ ÷◊¶∞≤—b‘⁄Îä∏◊Õ∆óUµƒƒ©∂À,Îä∏◊≤…”√≥…å¶∞≤—b,“ªÇÄ(g®®)πÃ∂®‘⁄–°‹á(ch®•)‹á(ch®•)º‹…œ,¡Ì“ªÇÄ(g®®)∞≤—b‘⁄ôM“∆æÄ(xi®§n)–‘ƒ£ΩMµƒª¨âK…œ.Õ®fl^(gu®∞)øÿ÷∆–°‹á(ch®•)‹á(ch®•)º‹…œµƒÀ≈∑˛ÎäôC’{’˚»˝ΩMæÄ(xi®§n)–‘ƒ£ΩM…œôC–µ ÷◊¶÷ÆÈgµƒøvœÚæ‡Îx,“‘¥Àflmë™èùπ‹π‹ƒ_ÈL(ch®¢ng)∂»µƒ◊ɪØ.æÄ(xi®§n)–‘ƒ£ΩMΩõ(j®©ng)ª¨âKéßÑ”(d®∞ng)Îä∏◊º∞∆‰…œµƒôC–µ ÷◊¶µƒôMœÚ“∆Ñ”(d®∞ng),“‘¥Àflmë™èùπ‹µƒ∞ÎèΩ◊ɪØ.›î»Îƒ≥èùπ‹–ÕÃñ∫Û,œµΩy◊‘Ñ”(d®∞ng)’{’˚»˝ΩMôC–µ ÷÷ÆÈgµƒæ‡Îx, πµ√»˝ΩM(¡˘÷ª)ôC–µ ÷∑÷ÑeŒª”⁄Æî«∞èùπ‹µƒÓ^≤ø°¢÷–≤ø∫ÕŒ≤≤ø.
°°°°±æŒƒå¶ U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒ÷˜“™¡„≤øº˛flM(j®¨n)––¡À¡¶ƒ‹Ö¢îµµƒ”ãÀ„∫Õflx–Õ.∆‰÷–÷˜“™¡„≤øº˛∞¸¿®øÿ÷∆––◊fl–°‹á(ch®•)øvœÚ“∆Ñ”(d®∞ng)∫ÕôM“∆ƒ£ΩM…œµƒÀ≈∑˛ÎäôC°¢øÿ÷∆ôC–µ ÷…˝ΩµµƒÎä∏◊°¢ ÷◊¶ÎäôC°¢ôC–µ ÷◊¶µ»≤øº˛,¥_∂®∏˜ÇÄ(g®®)≤øº˛µƒ–ÕÃñº∞œ‡ÍP(gu®°n)Ö¢îµ.
°°°°◊Ó∫Û,fl\”√ Creo3.0 Ω®¡¢ôC–µ ÷µƒ»˝æSƒ£–Õ≤¢flM(j®¨n)––ÃìîM—b≈‰.‘⁄≥‰∑÷øºë]Ü¢÷∆Ñ”(d®∞ng)ïr(sh®™)ëT–‘¡¶å¶◊•»°∞·fl\ôC–µ ÷À≤Ègµƒë™¡¶†ÓëB(t®§i)∫Õ ÷◊•◊É–ŒŒª“∆∫Û,Õ®fl^(gu®∞) ANSYSworkbench ‹õº˛å¶∆‰flM(j®¨n)––‘îºöµƒ”–œfi‘™∑÷Œˆ.∏˘ì˛ôC–µ ÷◊¶‘⁄≤ªÕ¨µƒº”ÀŸ∂»œ¬µƒë™¡¶∫Õ◊É–ŒàD,嶱»∑÷Œˆ”–œfi‘™∑÷ŒˆµƒΩYπ˚∫Õ¨Fàˆ(ch®£ng)’{‘ᵃΩYπ˚œ‡Ω¸,±Ì√˜À˘‘O”㵃ΩYòã∫Õ”–œfi‘™∑÷ŒˆÀ˘Ω®◊hµƒº”ÀŸ∂»∑÷ŒˆΩYπ˚∑˚∫œ’˚ÇÄ(g®®)◊•»°∞·fl\ôC–µ ÷µƒπ§Àá‘O”ã“™«Û.
°°°°ÍP(gu®°n)ÊI‘~:U –Õ‰ìπ‹;ôC–µ ÷;◊•»°;∞·fl\;Creo3.0 »˝æSΩ®ƒ£;ANSYS ∑÷Œˆ
°°°°Abstract
°°°°U-shaped steel pipe is made of long and thin straight steel pipe through pipe bendingprocess. It is widely used in heat exchanger and other equipment.This project aims at theproblem that the heavy material handling and fetching equipment in the original coldbending site needs to be replaced. It designs and develops a set of light and highlyautomated grasping and handling manipulator, which not only improves the productionefficiency of cold bending process, but also reduces the labor intensity and labor cost ofworkers.
°°°°In this paper, based on the understanding of the original pipe bending process and thematerial taking mechanism, according to different specifications (bending radius 0.2m ~1.2m, pipe bending pin length 0.3m ~ 1.4m), the use of the wheel, rail and rack of theoriginal material taking equipment to build three with the same rail car, each car is usingtwo manipulator grasp handling manipulator scheme.The mechanical claw is installed atthe end of the electric cylinder push rod, and the electric cylinder is installed in pairs, oneis fixed on the trolley frame, and the other is installed on the sliding block of the horizontallinear module.By controlling the servo motor on the trolley frame to adjust the longitudinaldistance between the mechanical claws on the three linear modules so as to adapt to thechange of the length of the elbow pin.The linear module makes the slider drive the electriccylinder and its mechanical gripper to make lateral movement to adapt to the radius changeof the elbow. After a certain elbow type is input, the system automatically adjusts thedistance between the three groups of manipulator, so that three groups (six) manipulatorare located at the head, middle and tail of the current elbow.
°°°°The calculation and selection of force and energy parameters of the main parts of themanipulator are carried out. The main parts include the servo motor which controls thelongitudinal movement and transverse movement of the trolley, the electric cylinder whichcontrols the mechanical hand to move up and down, the gripper motor, the mechanicalgripper and other parts, and the models and related parameters of each part are determined.
°°°°Finally, Creo 3.0 is used to build a three-dimensional model of the manipulator andmake virtual assembly. After fully considering the instantaneous stress state anddeformation displacement of the grasping and handling manipulator caused by inertia forceduring starting and braking, the detailed finite element analysis is carried out by ANSYSworkbench software. According to the stress and deformation diagrams of the gripperAbstractunder different acceleration, it is concluded that the results of finite element analysis aresimilar to those of field debugging. The structure designed in this paper and the results ofacceleration analysis recommended by finite element analysis are in line with therequirements of the technological design of the whole grasping and handling manipulator.
°°°°Key words: U-shaped steel pipe; Manipulator; Grab; Handling; Creo3.0 3D modeling;ANSYS analysis
°°°°ƒø ‰õ
°°°°’™ “™............................................................................................................................I
°°°°Abstract.......................................................................................................................II
°°°°ƒø ‰õ........................................................................................................................... II
°°°°µ⁄“ª’¬ æw ’ì............................................................................................................... 1
°°°°1.1 ’nÓ}µƒ—–æø±≥æ∞º∞“‚¡x......................................................................................... 1
°°°°1.1.1 ’nÓ}—–æø±≥æ∞...................................................................................................... 1
°°°°1.1.2 ’nÓ}—–æø“‚¡x...................................................................................................... 3
°°°°1.2 U –Õ‰ìπ‹∞·fl\◊•»°ôC–µ ÷á¯É»Õ‚¨F†Ó...................................................................... 3
°°°°1.3 ’쌃÷˜“™—–æø?j®¨)»»›º∞—–æø∑Ω∑?.................................................................................. 8
°°°°µ⁄∂˛’¬ U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒøÇÛw∑Ω∞∏‘O”ã.......................................................... 10
°°°°2.1 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒ‘O”ã“™«Û...................................................................... 10
°°°°2.1.1 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒøÇÛwΩYòã.................................................................... 10
°°°°2.2 ◊•»°∞·fl\ôC–µ ÷µƒøÇÛw∑Ω∞∏‘O”ã.............................................................................. 13
°°°°2.3 ◊•»°∞·fl\ôC–µ ÷µƒπ§◊˜‘≠¿Ì..................................................................................... 13
°°°°2.4 ôC–µ ÷ôMœÚ“∆Ñ”(d®∞ng)µƒ‘O”ãº∞π§◊˜‘≠¿Ì........................................................................... 15
°°°°2.5 øv“∆ôCò㵃‘O”ãº∞π§◊˜‘≠¿Ì..................................................................................... 16
°°°°2.5.1 Æê–Õ‰X‹á(ch®•)º‹µƒ‘O”ãÀº¬∑º∞π§◊˜‘≠¿Ì......................................................................... 16
°°°°2.5.2 ÚåÑ”(d®∞ng)øv“∆ôCò㵃‘O”ãº∞π§◊˜‘≠¿Ì............................................................................ 17
°°°°2.6 ôC–µ ÷ΩMº˛µƒ‘O”ãÀº¬∑º∞π§◊˜‘≠¿Ì............................................................................. 18
°°°°2.7 –°‹á(ch®•)÷˜“™fl\Ñ”(d®∞ng)∑ΩœÚ…œµƒ±£◊o—b÷√µƒ‘O”ãº∞π§◊˜‘≠¿Ì.................................................... 20
°°°°2.7.1 –°‹á(ch®•)øvœÚfl\Ñ”(d®∞ng)µƒ±£◊o—b÷√µƒ‘O”ãº∞∆‰π§◊˜‘≠¿Ì......................................................... 20
°°°°2.7.2 –°‹á(ch®•)ôMœÚfl\Ñ”(d®∞ng)µƒ±£◊o—b÷√µƒ‘O”ãº∞∆‰π§◊˜‘≠¿Ì......................................................... 21
°°°°2.7.3 ôC–µ ÷◊•»°fl\Ñ”(d®∞ng)ïr(sh®™)µƒ±£◊o—b÷√µƒ‘O”ãÀº¬∑º∞∆‰π§◊˜‘≠¿Ì.......................................... 21
°°°°2.8 ±æ’¬–°ΩY...................................................................................................................... 22
°°°°µ⁄»˝’¬ ◊•»°∞·fl\ôC–µ ÷µƒ÷˜“™‘Oljµƒ¿Ì’ì֢ãÀ„º∞flx–Õ................................................ 23
°°°°3.1 øv“∆–°‹á(ch®•)µƒÎäôC𶬠”ãÀ„º∞flx–Õ................................................................................... 23
°°°°3.2 ôM“∆ƒ£ΩMÎäôC𶬠”ãÀ„º∞flx–Õ.................................................................................... 27
°°°°3.3 ÷◊¶ÎäôCflx–Õ............................................................................................................ 30
°°°°3.4 ¥π÷±…˝ΩµÎä∏◊flx–Õ......................................................................................................... 31
°°°°3.5 Ω”Ω¸È_(k®°i)ÍP(gu®°n)flx–Õ................................................................................................................. 33
°°°°3.6 äAö§¬ì(li®¢n)›S∆˜µƒ”ãÀ„º∞flx–Õ............................................................................................... 35
°°°°3.7 ±æ’¬–°ΩY........................................................................................................ ................37
°°°°µ⁄Àƒ’¬ ◊•»°∞·fl\ôC–µ ÷÷˜“™¡„≤øº˛µƒΩYòã‘O”ãº∞»˝æSΩ®ƒ£................................................. 39
°°°°4.1 ˝X›Üǘє(d®∞ng)œµΩy................................................................................................................ 39
°°°°4.1.1 ˝X›Üǘє(d®∞ng)µƒΩYòãΩÈΩB..................................................................................................39
°°°°4.1.2 ˝X›Üǘє(d®∞ng)µƒ»˝æSΩ®ƒ£................................................................................................. 41
°°°°4.2 ÷◊¶èóª…î[óUäAæo—b÷√................................................................................................. 42
°°°°4.2.1 èóª…äAæo—b÷√µƒ‘O”ãÀº¬∑º∞π§◊˜‘≠¿Ì......................................................................... 42
°°°°4.2.2 èóª…î[óUäAæo—b÷√µƒ»˝æSΩ®ƒ£...................................................................................... 43
°°°°4.3 ‹á(ch®•)›ÜΩMµƒ»˝æSΩ®ƒ£º∞ΩYòã‘O”ã....................................................................................... 43
°°°°4.3.1 ‹á(ch®•)›ÜΩMµƒ‘O”ãÀº¬∑º∞π§◊˜‘≠¿Ì...................................................................................... 43
°°°°4.3.2 ‹á(ch®•)›ÜΩMµƒ»˝æSΩ®ƒ£........................................................................................................ 44
°°°°4.4 ø…’{ÎäôCµ◊◊˘µƒ»˝æS‘O”ã............................................................................................... 45
°°°°4.5 ∏˜≤øº˛—b≈‰Ûwµƒ»˝æSƒ£–Õ............................................................................................... 45
°°°°4.6 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒøÇÛw—b≈‰............................................................................... 46
°°°°4.7 ±æ’¬–°ΩY........................................................................................................................... 47
°°°°µ⁄ŒÂ’¬ ôC–µ ÷∏˜º”ÀŸ∂»†ÓëB(t®§i)œ¬µƒ ANSYS ∑÷Œˆ........................................................................48
°°°°5.1 ANSYS Workbench ‹õº˛≈c Creo3.0 µƒîµì˛fiDìQ............................................................. 49
°°°°5.1.1 ANSYS Workbench ‹õº˛ΩÈΩB......................................................................................49
°°°°5.1.2 ANSYS Workbench ≈c Creo3.0 µƒîµì˛Ωªª•.................................................................. 49
°°°°5.2 ◊•»°∞·fl\ôC–µ ÷–°‹á(ch®•)”–œfi‘™ƒ£–Õ................................................................................... 50
°°°°5.2.1 ôC–µ ÷»˝æSƒ£–Õµƒ∫Ü(ji®£n)ªØ.................................................................................................. 50
°°°°5.2.2 ◊•»°∞·fl\ôC–µ ÷µƒƒ£–Õ≤ƒ¡œåŸ–‘.................................................................................... 52
°°°°5.2.3 ƒ£–ÕµƒæW(w®£ng)∏ÒÑù∑÷........................................................................................................... 53
°°°°5.2.4 Ã̺”ºs ¯≈c›d∫…........................................................................................................... 55
°°°°5.3 ◊•»°∞·fl\ôC–µ ÷º”ÀŸ∂»†ÓëB(t®§i)œ¬µƒΩYπ˚≈c∑÷Œˆ...................................................................... 57
°°°°5.4 ±æ’¬–°ΩY............................................................................................................................. 63
°°°°µ⁄¡˘’¬ øÇΩY≈c’πÕ˚....................................................................................................................... 64
°°°°6.1 øÇΩY....................................................................................................................................... 64
°°°°6.2 ’πÕ˚........................................................................................................................................... 64
°°°°Ö¢øºŒƒ´I.................................................................................................................................. 66
°°°°µ⁄“ª’¬ æw ’ì
°°°°1.1 ’nÓ}µƒ—–æø±≥æ∞º∞“‚¡x
°°°°1.1.1 ’nÓ}—–æø±≥æ∞
°°°°‘⁄ÆîΩÒµƒ¥Û“郣÷∆‘ÏòI(y®®)÷–,∆ÛòI(y®®)Õ®≥£å£(zhu®°n)◊¢”⁄…˙Æa(ch®£n)fl^(gu®∞)≥õƒ◊‘Ñ”(d®∞ng)ªØ,“‘÷∏fl…˙Æa(ch®£n)–߬ ∫Õ¥_±£Æa(ch®£n)∆∑Ÿ|(zh®¨)¡ø.◊˜ûÈ◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)æÄ(xi®§n)µƒ÷ÿ“™≥…ÜT,π§òI(y®®)ôC∆˜»À÷ùu±ªπ´Àæ’Jø…∫Õ≤…”√[1].”…”⁄ø∆åW(xu®¶)ºº–g(sh®¥)µƒøÏÀŸ∞l(f®°)’π∫Õ –àˆ(ch®£ng)–Ë«ÛµƒøÏÀŸ∏¸–¬,‘⁄Æî«∞µƒ…˙Æa(ch®£n)–ŒÑ›∫Õ…Áï˛(hu®¨ )≠h(hu®¢n)æ≥÷–,÷ª”–≤ªî‡µƒÃ·∏flÆa(ch®£n)∆∑µƒ±æ…̵ƒŸ|(zh®¨)¡ø∫ÕÆa(ch®£n)¡ø≤¢ΩµµÕÆa(ch®£n)∆∑µƒ≥…±æ≤≈ƒ‹”––ßµƒÃ·∏flÆa(ch®£n)∆∑‘⁄ –àˆ(ch®£ng)…œµƒ∏dž顶.∆ÛòI(y®®)÷ª”–»´√Ê∞—Œ’fl@»˝’fl,≤≈ƒ‹‘⁄ –àˆ(ch®£ng)∏džé÷–¡¢”⁄≤ªî°÷Ƶÿ. “Ú¥À,‘⁄Æa(ch®£n)∆∑÷∆‘ÏÓI(l®´ng)”Ú,ÃÿÑe «‘⁄≈˙¡øÆa(ch®£n)∆∑µƒ…˙Æa(ch®£n)÷–,Æa(ch®£n)∆∑µƒ◊‘Ñ”(d®∞ng)ªØ÷∆‘Ï∑Ω∑®“—±ªèV∑∫ë™”√.π§òI(y®®)ôC∆˜»À‘⁄◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)÷–∆÷¯(zh®¥)∑«≥£÷ÿ“™µƒ◊˜”√,èƒÃ·∏flÆa(ch®£n)∆∑Ÿ|(zh®¨)¡ø∫Ֆ߬ ∫Õπù °Ñ⁄Ñ”(d®∞ng)¡¶≥…±æµƒ”^(gu®°n)¸c(di®£n)ÅÌ(l®¢i)ø¥,π§òI(y®®)ôC∆˜»À¥˙ÃÊ»Àπ§ «≤ªø…±‹√‚µƒ∞l(f®°)’π⁄ÖÑ›[2].
°°°°π§òI(y®®)ôC∆˜»Àµƒºº–g(sh®¥)∫Õë™”√ÀÆ∆Ω‘⁄“ª∂®≥Ã∂»…œ∑¥”≥¡Àá¯É»π§òI(y®®)◊‘Ñ”(d®∞ng)ªØµƒÀÆ∆Ω,ƒø«∞,π§òI(y®®)ôC∆˜»À÷˜“™≥–ì˙÷ÿèÕ–‘«“Ñ⁄Ñ”(d®∞ng)èä∂»òO¥Ûµƒπ§◊˜,»Á∫∏Ω”°¢áäÕø°¢∞·fl\“‘º∞∂—∂‚[3].ÎS÷¯(zh®¥)»ÀÓê(l®®i)ø∆åW(xu®¶)ºº–g(sh®¥)µƒ≤ªî‡∞l(f®°)’π,ôC∆˜»Àë™”√µƒø’Èg‘ΩÅÌ(l®¢i)‘ΩèV∑∫,Œ¥÷™µƒ≠h(hu®¢n)æ≥å¶ôC∆˜»ÀÆa(ch®£n)∆∑µƒπ¶ƒ‹Ã·≥ˆ¡À∏¸∏flµƒ“™«Û,¥ŸflM(j®¨n)¡ÀôC∆˜»Àºº–g(sh®¥)µƒ≤ªî‡Ã·∏fl[4].π§òI(y®®)ôC∆˜»Àµƒë™”√,∫‹¥Û≥Ã∂»…œ·å∑≈»ÀÓê(l®®i)ÜŒ’{∫Õ÷ÿèÕ–‘µƒÑ⁄Ñ”(d®∞ng),◊å»ÀÓê(l®®i)”–∏¸∂‡µƒïr(sh®™)Èg»•◊ˆ“ª–©—–æø–‘µƒπ§◊˜.“Ú¥À,‘S∂‡æfl”–œ»flM(j®¨n)“‚◊Rµƒπ´Àæ’˝‘⁄Õ∆flM(j®¨n)π§òI(y®®)ôC∆˜»Àµƒ“˝flM(j®¨n),“‘”√ÅÌ(l®¢i)»•àÖ–ƒ«–©èÕÎs∂¯”÷Œ£ÎUœµîµ›^∏flµƒ»ŒÑ’(w®¥).π§òI(y®®)ôC∆˜»ÀµƒèV∑∫ë™”√÷ùu∏ƒ…∆¡À»ÀÓê(l®®i)µƒ…˙ªÓ∑Ω Ω∫Õ…˙Æa(ch®£n)∑Ω Ω,≤¢‘⁄÷∏fl»ÀÓê(l®®i)…˙ªÓÀÆ∆Ω∫Õ…˙ªÓŸ|(zh®¨)¡ø∑Ω√Ê∞l(f®°)ì]÷¯(zh®¥)÷ÿ“™µƒ◊˜”√[5].
°°°°ƒ≥π´Àæ U –Õ‰ìπ‹÷∆‘ϵƒ‘≠≤ƒ¡œ «≤ªÕ¨Ωÿ√Ê≥fl¥Á∫Õ≤ªÕ¨ÈL(ch®¢ng)∂»µƒ÷±æÄ(xi®§n)‰ìπ‹,Ωõ(j®©ng)fl^(gu®∞)èùπ‹π§Àá÷∆‘Ï≥…≤ªÕ¨èùπ‹∞ÎèΩ∫Õèùπ‹π‹ƒ_ÈL(ch®¢ng)∂»µƒ U –Õ‰ìπ‹,èùπ‹π§Àᵃ÷˜“™¡˜≥à « ◊œ»å¢≥…¿¶µƒ÷±æÄ(xi®§n)‰ìπ‹”…––‹á(ch®•)µıfl\∑≈÷¡…œ¡œ≈_,‘Ÿèƒ…œ¡œ≈_“ª∏˘“ª∏˘µÿ∑÷Ω‚∞·fl\µΩøv“∆‹âµ¿…œ,∞¥’’èùπ‹ôCµƒπ§◊˜πù≈ƒ”…øv“∆‹âµ¿å¢÷±æÄ(xi®§n)‰ìπ‹fl\µΩèùπ‹ôC÷–,≤¢πÃ∂®◊°“ª∂À,∆‰¥Œ”…èùπ‹ôCµƒôMøv“∆ôCòã π÷±æÄ(xi®§n)‰ìπ‹åç(sh®™)¨F¿‰èù«˙,¥ÚÈ_(k®°i)èùπ‹ôCµƒÊiæo—b÷√,»ª∫Û”…»°¡œ—b÷√å¢ U –Õ‰ìπ‹◊•»°Ã·∆øv“∆÷¡ÕÀªπ§◊˜≈_flM(j®¨n)––ÕÀªπ§–Úµƒ≤Ÿ◊˜,‘⁄ÕÀªÕÍ≥…∫ÛÕ®fl^(gu®∞)‹á(ch®•)Èg––‹á(ch®•)fl\›îµΩ«Âœ¥≤Ÿ◊˜≈_å¶ U –Õ‰ìπ‹flM(j®¨n)––‰ìπ‹É»≤øµƒ«Âœ¥π§–Ú,«Âœ¥fl^(gu®∞)∫Ûµƒ U –Õ‰ìπ‹flM(j®¨n)––ÃΩÇ˚ôzúy,≤ªùM(m®£n)◊„ôzúyΩYπ˚µƒ U –Õ‰ìπ‹÷±Ω”ÑÃ≠»•≥˝,∫œ∏Òµƒ U –Õ‰ìπ‹¥Ú∞¸»Îœ‰,≤¢«“‘⁄œ‰◊”±Ì√ÊŸN…œòÀºà,◊¢√˜…˙Æa(ch®£n)–≈œ¢.U –Õ‰ìπ‹…˙Æa(ch®£n)º”π§fl^(gu®∞)≥Óä(ji®§n)œ¬àD 1.1.

°°°°‘≠”– U –Õ‰ìπ‹»°¡œ‘Olj «“ª≈_øv“∆fl\›î‹á(ch®•)∫Õ 6 ÇÄ(g®®)ƒ‹¥π÷±…˝ΩµµƒôC–µ ÷ΩM≥…,“ä(ji®§n)àD 1.2.øv“∆fl\›î‹á(ch®•)µı‘⁄É…flÖ∏flø’‹âµ¿÷–––◊fl,»°¡œ‘Olj“ÚôCòã±æÛw π”√‰ì≤ƒ,‘Olj±ø÷ÿ,»°¡œfl^(gu®∞)≥Ã÷–––◊flæè¬˝.”…”⁄ëT–‘¥ÛÎy“‘øÿ÷∆––◊flÀŸ∂»,fl\ÀՖ߬ µÕœ¬,ùM(m®£n)◊„≤ª¡À…˙Æa(ch®£n)πù≈ƒµƒ“™«Û,∂¯«“ΩYòã’ÒÑ”(d®∞ng)Ñ°¡“,‘άï¥Û.‘⁄‘≠”–µƒèùπ‹ôC»°¡œœµΩy÷–,◊•»°fl^(gu®∞)≥Ã÷––Ë“™≤Ÿ◊˜π§ ÷Ñ”(d®∞ng)÷ÇÄ(g®®)µƒ»•’{’˚É…flÖôC–µ ÷µƒôMœÚæ‡Îx,fl@∑N∑Ω∑®∫ƒïr(sh®™)°¢¬Èü©,«“ôC–µ ÷µƒ◊•»°æ´∂»∫Õ◊‘Ñ”(d®∞ng)ªØ≥Ã∂»›^µÕ.‘⁄¨Fàˆ(ch®£ng)≤Ÿ◊˜÷–,“Ú≤Ÿ◊˜π§µƒÂe’`≤Ÿ◊˜åß÷¬¨Fàˆ(ch®£ng)π§◊˜»ÀÜT ‹Ç˚µƒ ¬¿˝ïr(sh®™)∂¯∞l(f®°)…˙.ûÈ÷∏flèùπ‹…˙Æa(ch®£n)æÄ(xi®§n)◊‘Ñ”(d®∞ng)ªØ≥Ã∂»,÷∏flπ§◊˜–߬ ,úp…Ÿ»Àπ§≥…±æ∫Õúp–°π§»À ‹Ç˚µƒ∏≈¬ ,–Ë‘⁄‘≠”–‘Oljµƒ‹âµ¿º‹ª˘µA…œ÷ÿ–¬‘O”ã U –Õ‰ìπ‹èùπ‹ôC»°¡œ‘Olj.
°°°°‘≠»°¡œ‘Olj◊‘èƒ∞≤—b π”√∫ÛÓlÓl≥ˆ¨FÜñ(w®®n)Ó},¨F‘⁄“—Ωõ(j®©ng)Õ£÷π π”√.åç(sh®™)ÎH…˙Æa(ch®£n)÷–,Æîèùπ‹ôCÕÍ≥…èùπ‹π§–Ú∫Û,¨Fàˆ(ch®£ng)”…»Àπ§Ãß∆fl\÷¡ÕÀª≤Ÿ◊˜≈_,π§»ÀÑ⁄Ñ”(d®∞ng)èä∂»¥Û«“»Àπ§≥…±æ∏fl.

°°°°1.1.2 ’nÓ}—–æø“‚¡x
°°°°±æŒƒ‘O”㵃 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷≤…”√÷«ƒ‹◊•»°ôC∆˜»À∫Õ»ÀôCΩªª•ºº–g(sh®¥),Õ®fl^(gu®∞)嶻˝≈_◊•»°∞·fl\–°‹á(ch®•)…œµƒ¡˘ÇÄ(g®®)ôC–µ ÷»˝ÇÄ(g®®)fl\Ñ”(d®∞ng)∑ΩœÚµƒŒª“∆øÿ÷∆,åç(sh®™)¨F≤ªÕ¨“é∏Ò U–Õ‰ìπ‹µƒ◊‘Ñ”(d®∞ng)◊•»°∞·fl\𶃋.Õ¨ïr(sh®™)¥Û¥Ûúp›p¡Àfl\›î–°‹á(ch®•)µƒ÷ÿ¡ø,úp–°fl\––ëT–‘,±„”⁄fl\›î‹á(ch®•)øvœÚfl\Ñ”(d®∞ng)µƒÀŸ∂»øÿ÷∆,÷∏flèùπ‹…˙Æa(ch®£n)æÄ(xi®§n)µƒ…˙Æa(ch®£n)–߬ .‘⁄◊•»°∞·fl\µƒfl^(gu®∞)≥Ã÷–±æôC–µ ÷≤…”√¡Àåç(sh®™)ïr(sh®™)±Oúyµƒπ¶ƒ‹,ƒ‹å¶ôC–µ ÷‘⁄◊•»°∞·fl\fl^(gu®∞)≥Ã÷–µƒ∏˜ÇÄ(g®®)Ñ”(d®∞ng)◊˜flM(j®¨n)––±Oúy∫Õ’{’˚.±æ◊•»°∞·fl\ôC–µ ÷æfl”–“‘œ¬Éû(y®≠u)¸c(di®£n):◊•»°∞·fl\æ´∂»∏fl°¢ΩYòãæoúê°¢Ÿ|(zh®¨)¡ø›pëT–‘–°,»´≥Ã÷«ƒ‹◊‘Ñ”(d®∞ng)◊•»°∞·fl\≤ªÕ¨“é∏Òµƒ U –Õ‰ìπ‹.U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷Ìóƒøµƒ≥…π¶∏ƒ‘Ï,ƒ‹âÚ”––ßµƒÃ·∏fl U –Õ‰ìπ‹…˙Æa(ch®£n)æÄ(xi®§n)µƒ◊‘Ñ”(d®∞ng)ªØÀÆ∆Ω,úp›p≤Ÿ◊˜π§»ÀµƒÑ⁄Ñ”(d®∞ng)èä∂»∫Õ»Àπ§≥…±æ,Õ¨ïr(sh®™),ƒ‹âÚúp–°‘⁄◊•»°∞·fl\fl^(gu®∞)≥Ã÷–µƒ’ÒÑ”(d®∞ng)∫ՑΓÙ,ΩµµÕ≤Ÿ◊˜»ÀÜT‘⁄≤Ÿ◊˜fl^(gu®∞)≥Ã÷–µƒ’`≤Ÿ◊˜Ç˚∫¶.
°°°°1.2 U –Õ‰ìπ‹∞·fl\◊•»°ôC–µ ÷á¯É»Õ‚¨F†Ó
°°°°U –Õ‰ìπ‹÷∆‘Ï∫Ü(ji®£n)ÜŒ,≥…±æµÕ¡Æ,±ªèV∑∫ë™”√”⁄Âņt––òI(y®®)µƒìQü·∆˜÷–.ìQü·∆˜,”÷∑Q(ch®•ng)ü·ΩªìQ∆˜[6], «å¢ü·¡˜Ûwµƒ≤ø∑÷ƒ‹¡øǘflfΩo¿‰¡˜Ûwµƒ‘Olj,À˘“‘…˙Æa(ch®£n)µƒ U –Õ‰ìπ‹–Ë“™≥–ì˙“ª∂®µƒúÿ≤Ó∫Õâ∫¡¶.U –Õ‰ìπ‹åç(sh®™)ŒÔàD»ÁàD 1.3 À˘ æ.

°°°°Ç˜Ωyµƒ U –Õ‰ìπ‹…˙Æa(ch®£n)∑Ω∑®◊‘Ñ”(d®∞ng)ªØ≥Ã∂»›^µÕ,ûÈ¡À÷∏fl∆‰…˙Æa(ch®£n)–߬ ,ÓA”㌥ÅÌ(l®¢i) U–Õ‰ìπ‹…˙Æa(ch®£n)æÄ(xi®§n)µƒ◊‘Ñ”(d®∞ng)ªØ≥Ã∂»å¢‘ΩÅÌ(l®¢i)‘Ω∏fl.U –Õ‰ìπ‹µƒ÷∆‘Ï…ÃÇÉ√Ê≈R÷¯(zh®¥)…˝ºâfiD–Õ,á¯ÎH∏fl∂À÷∆‘Ï≈cá¯ÎH∑÷𧵃÷ÿ¥ÛÃÙë[7].ÆîΩÒ…Áï˛(hu®¨ )∞l(f®°)’πµƒ⁄ÖÑ›œ¬,π§òI(y®®)ôC∆˜»À‘⁄ U –Õ‰ìπ‹÷∆‘Ï÷–µƒë™”√墑ΩÅÌ(l®¢i)‘ΩèV∑∫,π§òI(y®®)ôC∆˜»À‘⁄π§◊˜÷–±»Ç˜Ωyπ§◊˜∏¸∏fl–ß,π§òI(y®®)ôC∆˜»ÀµƒÕ∂»Î π”√úp…Ÿ¡ÀÑ⁄Ñ”(d®∞ng)¡¶µƒ≥…±æ,Õ¨ïr(sh®™)“≤ΩµµÕ¡À ¬π ∞l(f®°)…˙µƒ∏≈¬ ,ôC∆˜÷ùu»°¥˙»Àπ§Ñ⁄Ñ”(d®∞ng)¡¶fl@“ª¨FœÛ“—Ωõ(j®©ng)≥…ûÈŒ¥ÅÌ(l®¢i)∞l(f®°)’𵃥Û⁄ÖÑ›.
°°°°≥£“鵃÷±æÄ(xi®§n)‰ìπ‹∞·fl\fl^(gu®∞)≥Ã÷–¿˚”√‰ìπ‹ø…“‘‘⁄ÉA–±µƒ÷ߺ‹…œflM(j®¨n)––ùLÑ”(d®∞ng)µƒÃÿ¸c(di®£n),‘O”㓪–©∑÷¡œ±€°¢≤ΩflM(j®¨n)¡∫µ»àÖ–—b÷√[8]”√ÅÌ(l®¢i)ÕÍ≥…‘⁄‰ìπ‹≥…–Œπ§–Ú∫Û嶉ìπ‹flM(j®¨n)––“ªÇÄ(g®®)ì‹Ñ”(d®∞ng)≤Ÿ◊˜ π‰ìπ‹¬‰µΩÉA–±≤Ÿ◊˜√Ê…œ,èƒ∂¯Õ®fl^(gu®∞)–±√Ê◊‘Ñ”(d®∞ng)ùL¬‰µΩ≤Ÿ◊˜≈_…œ,flM(j®¨n)––œ¬“ªµ¿π§–Úµƒ≤Ÿ◊˜.µ´ U –Õ‰ìπ‹◊•»°∞·fl\µƒfl^(gu®∞)≥Ã≈c≥£“é‰ìπ‹≤ªÕ¨,U –Õ‰ìπ‹üo(w®≤)∑®‘⁄–±√Ê…œflM(j®¨n)––ùLÑ”(d®∞ng),U –Õ‰ìπ‹µƒ◊•»°∫Õ∞·fl\œ‡Æî”⁄»°¡œôCòã“™Õ¨ïr(sh®™)◊•»°É…∏˘œ‡ª•flBΩ”µƒ‰ìπ‹,“Ú¥À,U –Õ‰ìπ‹µƒ◊•»°∞·fl\fl^(gu®∞)≥à «‘⁄“ªÇÄ(g®®)∆Ω√Ê…œ◊•»°,‘⁄ø’Èg…œfl\›îµƒŒª“∆fl\Ñ”(d®∞ng).
°°°°±æŒƒÀ˘‘O”㵃◊•»°∞·fl\ôC–µ ÷ «”√ÅÌ(l®¢i)◊•»° U –Õ‰ìπ‹,U –Õ‰ìπ‹µƒ◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)æÄ(xi®§n)∞¸¿®èùπ‹π§–Ú°¢∞·fl\π§–Ú“‘º∞ÕÀªπ§–Ú.‘⁄èùπ‹π§–Ú∫ÕÕÀªπ§–Ú÷ÆÈg–Ë“™flM(j®¨n)––∞·fl\π§–Ú,å¶ U –Õ‰ìπ‹flM(j®¨n)––“ªÇÄ(g®®)◊•»°∞·fl\µƒfl^(gu®∞)≥Ã.‘≠»°¡œôCòãΩYòãfl^(gu®∞)”⁄±ø÷ÿ,‘⁄fl\––fl^(gu®∞)≥Ã÷–Ωõ(j®©ng)≥£≥ˆ¨Fø®À¿¨FœÛ,«“‘⁄∏¸ìQ≤ªÕ¨“é∏Òµƒ U –Õ‰ìπ‹ïr(sh®™),–Ë“™»À𧻕’{’˚É…ÇÄ(g®®)ôC–µ ÷◊¶÷ÆÈgµƒôMœÚæ‡Îx»•flmë™∏¸ìQ“é∏Òfl^(gu®∞)∫Ûµƒ U –Õ‰ìπ‹,◊‘Ñ”(d®∞ng)ªØ≥Ã∂»µÕ«“∞≤»´œµîµ≤ª∏fl,≤ªùM(m®£n)◊„"÷«ƒ‹π§èS(ch®£ng)"[9]µƒ∞l(f®°)’π⁄ÖÑ›.
°°°°á¯Õ‚嶔⁄ U –Õ‰ìπ‹µƒ◊•»°∞·fl\fl@∑Ω√Ê—–æø›^…Ÿ.ƒø«∞,á¯Õ‚÷˜“™µƒ U –Õ‰ìπ‹…˙Æa(ch®£n)∆ÛòI(y®®)”√”⁄»°¡œπ§–Úµƒ‘Olj¥Û∂‡îµ∫‹±ø÷ÿ,Œ£ÎUœµîµ∏fl,Õ®≥£ «≤Ÿ◊˜»ÀÜT π”√ ÷Ñ”(d®∞ng)›o÷˙‹á(ch®•)flM(j®¨n)–– U –Õ‰ìπ‹µƒ…˙Æa(ch®£n)∫Õfl\›î[10-11].∏˙±æŒƒ—–æøµƒôC–µ ÷œ‡À∆∂»›^∏flµƒ «‰ìπ‹¥Ú∞¸‘Olj.àD 1.4 «µ¬á¯—–∞l(f®°)µƒ“ª∑N‰ìπ‹¥Ú∞¸ôC‘Olj.

°°°°ƒø«∞‘⁄÷–ᯠU –Õ‰ìπ‹µƒ…˙Æa(ch®£n)¡øæfi¥Û,ûÈ¡À÷∏fl U –Õ‰ìπ‹µƒ…˙Æa(ch®£n)÷∆‘σ‹¡¶,÷–ᯑ⁄ U –Õ‰ìπ‹ ’ºØ—–æø∑Ω√ÊÕ∂»Î¡À¥Û¡øµƒ»À¡¶∫ÕΩõ(j®©ng)ù˙ŸY‘¥.á¯É»∫‹∂‡‰ìËFπ´Àæ“—Ωõ(j®©ng)È_(k®°i)∞l(f®°)≥ˆ◊•»°∞·fl\ U –Õ‰ìπ‹µƒπ§òI(y®®)ôC∆˜»À, π”√›^∂‡µƒ «ËϺ‹ ΩΩYò㵃»°¡œôC∆˜»À,ÕÍ≥… U –Õπ‹‘⁄ø’ÈgÀÆ∆Ω…œµƒfl\›î.∏˘ì˛◊•»° U –Õ‰ìπ‹µƒ∑Ω Ω≤ªÕ¨,ø…∑÷ûÈÜŒ∏˘ U –Õ‰ìπ‹∫ÕÜŒ¿¶ U –Õ‰ìπ‹◊•»° ΩËϺ‹ôC∆˜»À.∞ÈÎS÷¯(zh®¥)÷«ƒ‹ºº–g(sh®¥)‘⁄÷–᯵ƒøÏÀŸ∞l(f®°)’π,“ï”X(ju®¶)Ãé¿Ì,ºtÕ‚∂®Œªµ»œ»flM(j®¨n)ºº–g(sh®¥)墬˝¬˝µƒë™”√µΩ◊•»°∞·fl\‘OljœµΩy÷–»•.
°°°°∫˙’˝¡x[12]·ò嶒‰÷ÈéräA–ƒ∞ÂflM(j®¨n)––∏ƒflM(j®¨n),‘ì‘Olj÷˜“™ «å¢“—Ωõ(j®©ng)º”π§∫√µƒ‰ìΩz–æº‹ΩªÂeµÿ∑≈÷√µΩ≤Ÿ◊˜≈_.ǘΩyµƒ∞·fl\∑Ω∑® « ÷π§∞·fl\,”…”⁄…˙Æa(ch®£n)“郣µƒîU¥Û∫ÕÑ⁄Ñ”(d®∞ng)≥…±æµƒÃ·∏fl,‘ΩÅÌ(l®¢i)‘Ω∂‡µƒ∆ÛòI(y®®)≤…”√π§òI(y®®)ôC∆˜»À»•¥˙ÃÊ»Àπ§Ñ⁄Ñ”(d®∞ng).ôC–µ ÷ÕÍ≥…µƒÑ”(d®∞ng)◊˜ûÈ∂®Œª-í∂≥÷-“∆Ñ”(d®∞ng)-∑≈÷√,Œª◊À∑Ω√Ê›^∫Ü(ji®£n)ÜŒ,ƒ©∂ÀàÖ–∆˜≤…”√∂˛÷∏∆Ω––ôCòã,»ÁàD 1.5 À˘ æ.èƒÎäôC›î≥ˆµƒ≈§æÿÕ®fl^(gu®∞)æfl”–◊‘Êi𶃋ŒÅ›ÜŒÅóUôCòãǘflfΩo˝X›Ü,Õ®fl^(gu®∞)˝X›Üǘє(d®∞ng)å¢≈§æÿǘflfΩoÍP(gu®°n)πù 1;ÍP(gu®°n)πù 2 æ‡ÎxÚåÑ”(d®∞ng)—b÷√›^flh,Õ¨ò”flxìÒ˝X›Üǘє(d®∞ng)µƒ«Èõrœ¬ï˛(hu®¨ )åß÷¬ΩYò㵃÷ÿ¡ø◊É¥Û,≤ª¿˚”⁄ôC–µ ÷◊¶µƒøÿ÷∆∫Õ∞·fl\π§◊˜,“Ú¥Àflx”√‰ìéßǘє(d®∞ng)ÅÌ(l®¢i)ǘflf”…ÚåÑ”(d®∞ng)ÎäôC›î≥ˆµƒ≈§æÿµΩÍP(gu®°n)πù 2.

°°°°≤‹º“ˆŒ[13]‘O”㵃¥a∂‚ôC∆˜»Àµƒ…˙Æa(ch®£n)πù≈ƒûÈ 800 ¥Œ/–°ïr(sh®™),÷ÿèÕ∂®Œªæ´∂»ûÈ 0.5mm,≥–›dƒ‹¡¶ûÈ 300kg.’˚ÇÄ(g®®)ôC∆˜»ÀΩYòã «”…∫‹∂‡óUº˛Õ®fl^(gu®∞)fiDÑ”(d®∞ng)ÍP(gu®°n)πùflBΩ”∂¯≥…,÷˜“™ΩYòã”–µ◊◊˘°¢—¸≤ø°¢«∞ÚåÑ”(d®∞ng)±€°¢ÕÛ≤ø°¢«∞±€∫Õ¥Û±€.‘⁄‘⁄ø’Èg…œÕÍ≥…ÀƒÇÄ(g®®)fl\Ñ”(d®∞ng):—¸≤ø“‘…œ¿@µ◊◊˘µƒ–˝fiDfl\Ñ”(d®∞ng)°¢¥Û±€µƒ…œœ¬fl\Ñ”(d®∞ng)°¢«∞±€µƒ«∞∫Ûfl\Ñ”(d®∞ng)∫ÕÕÛ≤øµƒªÿfiDfl\Ñ”(d®∞ng).Õ®fl^(gu®∞)‘⁄ÕÛ≤ø…œº”—bôC–µ ÷◊¶ÅÌ(l®¢i)◊•∑≈ŒÔ∆∑,≈c≥£“鵃¥Æ¬ì(li®¢n) ΩôC∆˜»Àœ‡±»,‘ìôC∆˜»Àµƒfl\––∑Ω Ω «å¢ÎäôC∞≤—b‘⁄«∞±€µƒÚåÑ”(d®∞ng)±€∫Õ—¸≤øµƒflBΩ”Ãé,Õ®fl^(gu®∞)¥Û±€Õ‚Ç»µƒ∆Ω––ÀƒflÖ–ŒôCòã π«∞±€∫Õ«∞±€ÚåÑ”(d®∞ng)±€Õ¨ïr(sh®™)fl\Ñ”(d®∞ng),Éû(y®≠u)ªØ¡À¥a∂‚ôC∆˜»ÀµƒÑ”(d®∞ng)¡¶åW(xu®¶)–‘ƒ‹;Õ®fl^(gu®∞)É…ΩMœ‡ª•ÒÓ∫œµƒ∆Ω––ÀƒflÖ–ŒôCòã¥_±£¡ÀÕÛ≤øΩYò㵃ÀÆ∆Ω†ÓëB(t®§i).¥a∂‚ôC∆˜»À»ÁàD 1.6 À˘ æ.

°°°°≈c±æ’nÓ}¬ì(li®¢n)œµ◊Ó√‹«–“™ «ËϺ‹ ΩôC∆˜»À,ËϺ‹ ΩôC∆˜»À÷˜“™”–ôCòã±æÛw°¢Ç˜Ñ”(d®∞ng)—b÷√°¢ÚåÑ”(d®∞ng)—b÷√∫ÕôC–µ ÷ΩMº˛Àƒ≤ø∑÷òã≥…[14].ǘє(d®∞ng)—b÷√÷˜“™∞¸¿®éßǘє(d®∞ng)°¢ùL÷ÈΩzóU°¢˝X›Ü˝Xólµ»;ÚåÑ”(d®∞ng)—b÷√“ª∞„≤…”√À≈∑˛ÎäôC∫Õ≤ΩflM(j®¨n)ÎäôC,”√“‘ πƒ©∂ÀàÖ–∆˜Æa(ch®£n)…˙œ‡ë™µƒÑ”(d®∞ng)◊˜;øÿ÷∆œµΩy∏˘ì˛›î»Î≥ÖڜÚÚåÑ”(d®∞ng)—b÷√∫Õƒ©∂ÀàÖ–∆˜∞l(f®°)ÀÕ√¸¡Ó–≈Ãñ,å¶∆‰flM(j®¨n)––øÿ÷∆[15-16].ËϺ‹ôC∆˜»ÀΩYòã»ÁàD 1.7 À˘ æ.

°°°°ÅÜ§[17]å¶ËϺ‹ ΩôC¥≤…œœ¬¡œôC∆˜»ÀflM(j®¨n)––¡À∏ƒflM(j®¨n)∑÷Œˆ,»ÁàD 1.8 À˘ æ.‘ìôC∆˜»ÀµƒΩYòã±æÛw÷˜“™”…ÿQ¡∫°¢ôM¡∫°¢ª¨∞°¢ôC¥≤°¢÷ß÷˘∫ÕôC–µ ÷◊¶µ»ΩM≥….ôM¡∫∫Õ¡¢÷˘‘⁄ΩYòã÷–∆÷ß쌵ƒ◊˜”√,ª¨∞‘⁄ÿQ¡∫…œ◊ˆ÷±æÄ(xi®§n)fl\Ñ”(d®∞ng),éßÑ”(d®∞ng)ôC–µ ÷◊¶ÕÍ≥…◊•»°µƒπ§◊˜.“ª∞„«Èõrœ¬,ª¨∞‘⁄ôM¡∫…œµƒôMœÚfl\Ñ”(d®∞ng)∂®¡xûÈ X ›S;ª¨∞‘⁄ÿQ¡∫…œµƒ¥π÷±fl\Ñ”(d®∞ng)∂®¡xûÈ Z›S.’˚ÇÄ(g®®)÷ßìŒΩYòã «µ◊◊˘°¢ôM¡∫∫Õ¡¢÷˘ΩM≥…µƒæÿ–ŒøÚº‹ΩYòã,‘ìΩYòãæfl”–∏¸∫√µƒΩYòãÑÇ∂»∫Õfl\Ñ”(d®∞ng)∑Ä∂®–‘.¥ÀôC∆˜»ÀµƒÇ˜Ñ”(d®∞ng)∑Ω Ω≤…”√¡À˝X›Ü˝XólµƒÇ˜Ñ”(d®∞ng),∆‰Éû(y®≠u)¸c(di®£n)‘⁄”⁄ǘє(d®∞ng)æ´∂»›^∏fl,ǘflfÑ”(d®∞ng)¡¶¥Û,˝X›Ü˝Xólø…“‘‘⁄π§õrólº˛ê∫¡”«“≠h(hu®¢n)æ≥èÕÎs∂‡ò”µƒ«Èõrœ¬π§◊˜,∂¯«“÷∆‘Ï∑Ω±„.Õ®fl^(gu®∞)úpÀŸ∆˜úpÀŸfl^(gu®∞)∫ÛµƒÀ≈∑˛ÎäôC∏˙˝X›Üœ‡flB,Õ®fl^(gu®∞)˝X›Ü≈c˝Xólµƒáß∫œÇ˜Ñ”(d®∞ng),å¢À≈∑˛ÎäôCµƒ–˝fiDfl\Ñ”(d®∞ng)fiDªØûÈ¡À˝X›Ü‘⁄˝Xól…œµƒ÷±æÄ(xi®§n)fl\Ñ”(d®∞ng),flx”√éß±ßÈl𶃋µƒÀ≈∑˛ÎäôC,‘⁄ôC∆˜»À∞l(f®°)…˙‘OÇ‰π ’œïr(sh®™)À≈∑˛ÎäôCø…“‘éßÑ”(d®∞ng)’˚ÇÄ(g®®)ôC∆˜»Àæoº±÷∆Ñ”(d®∞ng),ΩµµÕ¡ÀŒ£ÎU∞l(f®°)…˙µƒ∏≈¬ .

°°°°‘⁄Ωõ(j®©ng)ù˙∫Õø∆ºººº–g(sh®¥)µƒ≤ªî‡∞l(f®°)’πµƒΩÒÃÏ,÷∆‘ÏòI(y®®)µƒÆa(ch®£n)òI(y®®)ΩYòã∫Õ…˙Æa(ch®£n)ƒ‹¡¶±ÿ»ªå¢≤ªî‡µƒ∏¸–¬,÷«ƒ‹ªØ°¢◊‘Ñ”(d®∞ng)ªØ‘ΩÅÌ(l®¢i)‘Ω≥…ûÈÆî¥˙÷∆‘ÏòI(y®®)∞l(f®°)’πÀÆ∆Ωµƒ≥±¡˜.≈cπ§òI(y®®)ôC∆˜»Àœ‡±»,ǘΩyµƒ‘Oljºº–g(sh®¥)¬‰∫Û,…˙Æa(ch®£n)–߬ µÕœ¬,≤ªƒ‹ùM(m®£n)◊„¨F¥˙Æa(ch®£n)∆∑µƒ…˙Æa(ch®£n)÷∆‘Ï“™«Û,«“üo(w®≤)∑®∏˙π§òI(y®®)ôC∆˜»À“ªò”◊‘Ñ”(d®∞ng)µƒ„ïΩ”«∞∫Ûπ§–Ú,––≥…ÕÍ’˚µƒ◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)æÄ(xi®§n)[18].‘⁄ U –Õ‰ìπ‹◊•»°∞·fl\fl@∑Ω√Ê,ËϺ‹ ΩôC∆˜»À «Œ¥ÅÌ(l®¢i)∞l(f®°)’πµƒ÷˜¡˜.ÎS÷¯(zh®¥)÷«ƒ‹ªØ°¢◊‘Ñ”(d®∞ng)ªØºº–g(sh®¥)µƒ∞l(f®°)’π,∏¸∂‡–¬–Õºº–g(sh®¥)å¢ï˛(hu®¨ )ë™”√µΩËϺ‹ôC∆˜»À…œ,Œ¥ÅÌ(l®¢i)µƒËϺ‹ôC∆˜»Àå¢∏¸º”÷«ƒ‹°¢ú ¥_∫ÕÏ`ªÓ[19].
°°°°1.3 ’쌃÷˜“™—–æø?j®¨)»»›º∞—–æø∑Ω∑?/strong>
°°°°(1)U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷øÇÛw∑Ω∞∏µƒ‘O”ã
°°°°∏˘ì˛ U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷µƒºº–g(sh®¥)“™«Û,÷∆∂®ôC–µ ÷µƒøÇÛw∑Ω∞∏,¥_∂®ôC–µ ÷µƒπ§◊˜‘≠¿Ì∫ÕΩYòã.±æŒƒ‘O”㵃 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷åç(sh®™)¨Få¶≤ªÕ¨–ÕÃñµƒ U –Õ‰ìπ‹◊•»°°¢fl\›î∫Õ∑≈÷√µ»π¶ƒ‹;Õ®fl^(gu®∞)»ÀôCΩÁ√ÊflxìÒ≤ªÕ¨èùπ‹µƒ–ÕÃñ,œµΩyø…◊‘Ñ”(d®∞ng)æ´¥_’{’˚ôC–µ ÷µƒŒª÷√,”––ß÷∏flèùπ‹ôC»°¡œ–߬ ,ΩµµÕ»Àπ§Ñ⁄Ñ”(d®∞ng)èä∂».
°°°°(2)÷˜“™‘Oljµƒ¡¶ƒ‹Ö¢îµ”ãÀ„º∞flx–Õ
°°°°å¶À≈∑˛ÎäôC°¢’{ÀŸÎäôCÎä∏◊µ»àÖ–≤øº˛flM(j®¨n)––¡¶ƒ‹Ö¢îµ”ãÀ„∫Õflx–Õ,∏˘ì˛É…∏˘Ç˜Ñ”(d®∞ng)›S÷ÆÈgµƒflBΩ”ólº˛flM(j®¨n)––”ãÀ„≤¢flxìÒäAö§¬ì(li®¢n)›S∆˜–ÕÃñ;◊Ó∫Û‘⁄’˚ÇÄ(g®®)ôC–µ ÷µƒé◊ÇÄ(g®®)fl\Ñ”(d®∞ng)∑ΩœÚ…œÕÍ≥…±£◊o—b÷√Ω”Ω¸È_(k®°i)ÍP(gu®°n)µƒflx–Õ.–Ë“™flx–Õµƒ‘Olj“ä(ji®§n)±Ì 1-1.

°°°°(3)»˝æSƒ£–Õ‘O”ãº∞ÃìîM—b≈‰
°°°° π”√ Creo3.0 ‹õº˛å¶◊•»°∞·fl\ôC–µ ÷Ω®¡¢»˝æSƒ£–Õ≤¢—b≈‰,÷˜“™∞¸¿® U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷º∞≈‰Ã◊µƒ‰ìπ‹äAæo—b÷√,¥_∂®“ªÇÄ(g®®)À≈∑˛ÎäôCÕ¨ïr(sh®™)éßÑ”(d®∞ng)É…Ç»µƒ˝X›Ü˝Xólǘє(d®∞ng)∑Ω Ω,∑÷Œˆ˝X›Ü˝Xól‘⁄áß∫œÇ˜Ñ”(d®∞ng)ïr(sh®™)å¶∞≤—bólº˛“™«Û,èƒ∂¯‘O”ã’{’˚˝X›ÜÈgœ∂’{’˚—b÷√;¿L÷∆◊•»°∞·fl\ôC–µ ÷µƒ÷˜“™¡„≤øº˛∫Õ»˝æSåç(sh®™)Ûwƒ£–Õ,∞¸¿®‹á(ch®•)º‹ΩYòã,¡¢÷˘ôM¡∫°¢åß‹â°¢ÕœÊú∫Õøÿ÷∆πÒµ»¡„º˛.
°°°°(4)ª˘”⁄”–œfi‘™µƒëT–‘¡¶∑¬’Ê
°°°°»˝æS—b≈‰ÕÍ≥…∫Û,…˙≥… step Œƒº˛,å߻ΠANSYS ‹õº˛÷–,Ã̺”œ‡ÍP(gu®°n)flÖΩÁºs ¯ólº˛∫Õ›d∫…,嶒˚ÇÄ(g®®)◊•»°∞·fl\ôC–µ ÷‘⁄º”ÀŸ∂»Æa(ch®£n)…˙µƒëT–‘¡¶œ¬,flM(j®¨n)––∑÷Œˆ’˚ÇÄ(g®®)◊•»°∞·fl\ôC–µ ÷µƒ◊É–Œ“‘º∞뙡¶◊ɪثÈõr,Õ®fl^(gu®∞)∏˙¨Fàˆ(ch®£ng)å¶À≈∑˛ÎäôCflM(j®¨n)––øÿ÷∆º”ÀŸ∂»ÅÌ(l®¢i)flM(j®¨n)––‘Olj’{‘ᵃΩYπ˚œ‡ΩY∫œ,◊ÓΩK¥_∂®◊•»°∞·fl\ôC–µ ÷‘⁄fl\––fl^(gu®∞)≥Ã÷–ܢє(d®∞ng)∫Õ÷∆Ñ”(d®∞ng)µƒº”ÀŸ∂», π–°‹á(ch®•)ø…“‘åç(sh®™)¨F∆Ω∑Äfl\––,∑˚∫œ◊•»°∞·fl\ôC–µ ÷µƒ π”√“™«Û.








°°°°…………”…”⁄±æŒƒ∆™∑˘›^ÈL(ch®¢ng),≤ø∑÷É»»› °¬‘,‘îºö»´Œƒ“ä(ji®§n)Œƒƒ©∏Ωº˛
°°°°µ⁄¡˘’¬ øÇΩY≈c’πÕ˚
°°°°6.1 øÇΩY
°°°°Õ®fl^(gu®∞)¡ÀΩ‚‘≠”–“ªÛw ΩU –Õ‰ìπ‹“∆›d∞·fl\ôCòã∫ÕΩY∫œ‘ìπ´Àæ¨F”–µƒ U –Õ‰ìπ‹“é∏Ò°¢…˙Æa(ch®£n)πù≈ƒ∫Õ“∆›dôCòã◊•»°∞·fl\µƒª˘±æπ§◊˜¡˜≥Ã,—–÷∆¡À≥ˆ¡À U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷.◊•»°∞·fl\ôC–µ ÷Õ®fl^(gu®∞)»˝ΩMÎäôC∑÷Ñeøÿ÷∆»˝ΩMôC–µ ÷(√øΩMÉ…ÇÄ(g®®))»˝ÇÄ(g®®)fl\Ñ”(d®∞ng)∑ΩœÚ…œµƒŒª“∆ÅÌ(l®¢i)åç(sh®™)¨F¡À≤ªÕ¨ U –Õ‰ìπ‹µƒ◊‘Ñ”(d®∞ng)◊•»°.‘⁄‘O”ã U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷«∞∆⁄,≤Èø¥¡À¥Û¡ø U –Õ‰ìπ‹»°¡œ‘Oljµƒ∞l(f®°)√˜å£(zhu®°n)¿˚∫ÕÖ¢øºŒƒ´I,≤¢«“嶥ÀflM(j®¨n)––¡À’˚¿Ì∫Õ—–æø.
°°°°±æŒƒµƒ÷˜“™—–æø?j®¨)»»›∞¸¿®“‘œ¬é◊ÇÄ(g®®)≤ø∑÷:
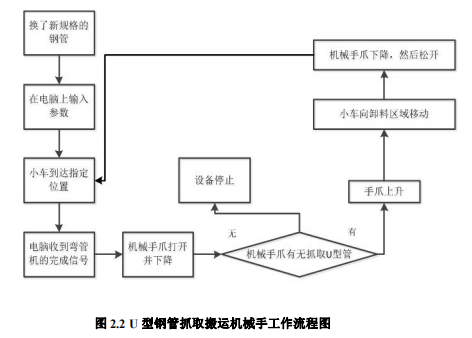
°°°°(1)å¶ U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷flM(j®¨n)––¡ÀøÇÛw∑Ω∞∏‘O”ã,¥_∂®¡À◊•»°∞·fl\ôC–µ ÷µƒ»°¡œ∞·fl\π§–Ú∏˙èùπ‹π§–Ú∫ÕÕÀªπ§–Ú÷ÆÈgµƒ„ïΩ”,å¶◊•»°∞·fl\ôC–µ ÷µƒ»˝ÇÄ(g®®)÷˜“™fl\Ñ”(d®∞ng)∑ΩœÚ…œµƒfl\Ñ”(d®∞ng)≤øº˛flM(j®¨n)––¡ÀøvœÚôCòã°¢ôM“∆ƒ£ΩM°¢◊•»°∞·fl\ôC–µ ÷ΩMº˛º∞Îäö‚±£◊o—b÷√µ»∑Ω∞∏‘O”ã.∏˘ì˛‘ìπ´À浃…˙Æa(ch®£n)–Ë«Û,øºë]µΩ‘⁄√ø¥Œ∏¸ìQ≤ªÕ¨“é∏Òïr(sh®™)–Ë“™‘⁄≤Ÿ◊˜≈_…œ‘îºö›î»Î≥ı ºÖ¢îµ,◊ÓΩK¥_∂®…˙Æa(ch®£n)πù≈ƒûÈ 55s,º¥å¶“ª∏˘ U –Õ‰ìπ‹ÕÍ≥…“ª’˚ÇÄ(g®®)◊•»°∞·fl\µƒfl^(gu®∞)≥ÃûÈ 55s,Õ®fl^(gu®∞)»˝ÇÄ(g®®)fl\Ñ”(d®∞ng)∑ΩœÚµƒfl\Ñ”(d®∞ng)åç(sh®™)¨F¡À“ªÃ◊◊‘Ñ”(d®∞ng)◊•»°µƒôC–µ ÷.
°°°°(2)å¶◊•»°∞·fl\ôC–µ ÷À˘–˵ƒÎäôC°¢Îä∏◊°¢ôM“∆ƒ£ΩMµ»òÀú ‘OljflM(j®¨n)––¡À”ãÀ„∫Õflx–Õ.
°°°°(3)å¶˝X›Üǘє(d®∞ng)°¢ÎäôC’{’˚—b÷√°¢‹á(ch®•)›ÜΩM°¢èóª…äAæoî[óU—b÷√°¢Æê–Õ‰X‹á(ch®•)º‹µ»÷˜“™ΩYòãflM(j®¨n)––¡ÀΩYòã‘O”ã∫Õ»˝æSΩ®ƒ£.◊Ó∫Û,Õ®fl^(gu®∞) Creo3.0 ‹õº˛å¢‘O”ã≥ˆµƒ∏˜»˝æS¡„≤øº˛ƒ£–Õ∞¥’’åç(sh®™)ÎH—b≈‰fl^(gu®∞)≥Ñ⁄‹õº˛÷–flM(j®¨n)––ÃìîMµƒ—b≈‰,Ñì(chu®§ng )Ω®¡À’˚ÇÄ(g®®) U –ÕÑÇπ‹◊•»°∞·fl\ôC–µ ÷µƒ»˝æSƒ£–Õ.
°°°°(4)fl\”√ ANSYS Workbench ‹õº˛å¶◊•»°∞·fl\ôC–µ ÷flM(j®¨n)––¡À≤ªÕ¨º”ÀŸ∂»œ¬ëT–‘¡¶µƒ”–œfi‘™∑÷Œˆ,µ√≥ˆ¡À”–œfi‘™∑÷ŒˆµƒΩYπ˚∫Õ¨Fàˆ(ch®£ng)µƒ’{‘áΩYπ˚¥Û÷¬œ‡Õ¨.≤ªÕ¨º”ÀŸœ¬ëT–‘¡¶µƒ”–œfi‘™∑÷Œˆ «å¶◊•»°∞·fl\ôC–µ ÷‘⁄œ‡Õ¨›d∫…µƒ«Èõrœ¬,ܢє(d®∞ng)ªÚ’fl÷∆Ñ”(d®∞ng)µƒÀ≤Ègº”ÀŸ∂»Æa(ch®£n)…˙µƒëT–‘¡¶å¶’˚ÇÄ(g®®)–°‹á(ch®•)ΩYò㵃”∞Ìë,∑¬’Ê∞l(f®°)¨F’˚ÇÄ(g®®)◊•»°∞·fl\ôC–µ ÷‘⁄ëT–‘¡¶µƒ”∞Ì뜬,◊É–Œ∫Õ뙡¶◊Ó¥ÛÃé¥_åç(sh®™)∞l(f®°)…˙‘⁄’˚ÇÄ(g®®)◊•»°∞·fl\ôC–µ ÷ÿì›dµƒƒ©∂À,“≤æÕ «ôC–µ ÷◊¶Ãé.Õ¨ïr(sh®™),∞l(f®°)¨F‘⁄ π”√º”ÀŸ∂»ûÈ 300 mm/s2 µƒ«Èõrœ¬,ôC–µ ÷◊¶µƒ◊Ó¥Û뙡¶∫Õ◊Ó¥Û◊É–ŒŒª“∆∂º‘⁄≤ƒ¡œ‘S”√∑∂á˙÷ÆÉ»,ùM(m®£n)◊„‘ìπ´Àæ–Ë“™µƒ◊•»°πù≈ƒ,∑˚∫œ…˙Æa(ch®£n)π§Àá“™«Û.
°°°°6.2 ’πÕ˚
°°°°±æŒƒ‘⁄—–æø¡À‘≠’˚Ûw Ω»°¡œôCòã∫Û,±£¡Ù¡À‘≠ôCò㵃‹á(ch®•)º‹°¢åß‹â°¢˝Xólµ»ΩYòã,≤…”√ƒ£âKªØ‘O”ã÷ÿ–¬‘O”ã»°¡œôCòã,–¬‘O”㵃 U –Õ‰ìπ‹◊•»°∞·fl\ôC–µ ÷Õ®fl^(gu®∞)»˝ÇÄ(g®®)∑ΩœÚ…œfl\Ñ”(d®∞ng)ΩMº˛µƒ’{’˚åç(sh®™)¨F¡À≤ªÕ¨“é∏Òµƒ U –Õ‰ìπ‹µƒ◊•»°.Õ®fl^(gu®∞)”–œfi‘™∑¬’ÊΩYπ˚∫Õ¨Fàˆ(ch®£ng)å¶◊•»°∞·fl\ôC–µ ÷flM(j®¨n)––¥Û≈˙¡ø≤ªÕ¨“é∏Òµƒ‰ìπ‹◊•»°∞·fl\µƒ’{‘á,úy‘áΩYπ˚±Ì√˜—–÷∆µƒ U –ÕÑÇπ‹◊•◊•»°∞·fl\ôC–µ ÷ùM(m®£n)◊„‘O”ã“™«Û.
°°°°‘ì◊•»°∞·fl\ôC–µ ÷’˝ ΩflM(j®¨n)––…˙Æa(ch®£n)∫Û,¥Û¥Û÷∏fl¡À U –Õ‰ìπ‹…˙Æa(ch®£n)–߬ .±æ◊•»°∞·fl\ôC–µ ÷åç(sh®™)¨F¡À 230mm<R≤1000mm,5000mm<L≤12000mm µƒ U –Õ‰ìπ‹◊‘Ñ”(d®∞ng)◊•»°∞·fl\ , ‘ì π´ Àæ À˘ ÷∆ ‘Ï µƒ U –Õ ‰ì π‹ èù π‹ ∞Î èΩ ∫Õ π‹ ƒ_ ÈL(ch®¢ng) ∂» ∑∂ á˙ ûÈ 200mm <R≤1200mm,3000mm<L≤14000mm,π ±æ‘Oljƒø«∞÷ª «ùM(m®£n)◊„¡À‘ìπ´Àæ∞Ÿ∑÷÷Æ 90 µƒ“é∏Òµƒ U –Õ‰ìπ‹,∫Û∆⁄flÄ–Ë∏ƒflM(j®¨n).±æ◊•»°∞·fl\ôC–µ ÷‘⁄’˚ÇÄ(g®®) U –Õ‰ìπ‹…˙Æa(ch®£n)æÄ(xi®§n)÷–∆»°¡œπ§–Úµƒ◊˜”√,ÕÍ√¿µƒ„ïΩ”¡Àèùπ‹π§–Ú∫ÕÕÀÿõπ§–Ú,‘ˆº”¡À’˚ÇÄ(g®®) U –Õ‰ìπ‹…˙Æa(ch®£n)æÄ(xi®§n)µƒ◊‘Ñ”(d®∞ng)ªØ≥Ã∂».◊•»°∞·fl\ôC–µ ÷◊ÓΩKå¢ U –Õ‰ìπ‹∑≈÷√‘⁄∑≈÷√≤Ÿ◊˜≈_…œ,∫Û∆⁄ï˛(hu®¨ )È_(k®°i)∞l(f®°)≥ˆ‰ìπ‹∑≈÷√fl^(gu®∞)∫Û,Õ®fl^(gu®∞)∏˙◊•»°∞·fl\ôC–µ ÷≈‰Ã◊µƒ“∆‘‘ôCòãå¢ U –Õ‰ìπ‹fl\›îµΩÕÀª≤Ÿ◊˜≈_…œ,ÕÍ≥…’˚ÇÄ(g®®) U –Õ‰ìπ‹◊‘Ñ”(d®∞ng)ªØ…˙Æa(ch®£n)æÄ(xi®§n).fl@∑N’˚ól…˙Æa(ch®£n)æÄ(xi®§n)»´≤øåç(sh®™)¨F◊‘Ñ”(d®∞ng)ªØ∑˚∫œ¡ÀÆî¥˙π§òI(y®®)÷∆‘Ï∫Õ∞l(f®°)’πµƒ⁄ÖÑ›.∑˚∫œ¡Àπ§òI(y®®) 4.0 µƒ∞l(f®°)’π∏fl∂À—b≈‰÷∆‘ϵƒÃÿ¸c(di®£n).
°°°°÷¬ ÷x
°°°°∏–÷xåW(xu®¶)–£ΩoŒ“ÇÉ÷π©¡ÀÉû(y®≠u)¡ºµƒåW(xu®¶)¡ï≠h(hu®¢n)æ≥,åç(sh®™)Úû “åí≥®√˜¡¡,åW(xu®¶)–£≠h(hu®¢n)æ≥Éû(y®≠u)√¿,Àfi…·π‹¿Ì”––Ú,∏…ÉÙ∞≤Ïo,Õ¨ïr(sh®™),åW(xu®¶)–£ΩMøó∂‡¥ŒàÛ∏Êï˛(hu®¨ ),ƒøµƒ «Õÿå팓Çɵƒ—€ΩÁ,Ü¢∞l(f®°)Œ“ÇɵƒÀº¬∑,∏–÷xåW(xu®¶)–£œ§–ƒµƒ≈‡B!
°°°°∏–÷xŒ“µƒåßéüÕı»´œ»Ωà ⁄,胒쌃flxÓ}È_(k®°i) º,¿œéü“ª÷±∂º «œ§–ƒµƒΩoŒ“÷vΩ‚÷™◊R,æflÛw°¢ºö÷¬∫Õ»´√Ê.‘⁄åë(xi®ß)◊˜ÎA∂Œ,¿œéüΩoŒ“÷π©åë(xi®ß)◊˜∑ΩœÚ–‘µƒ÷∏åß,◊匓ƒ‹âÚ±»›^»´√ʵƒ’πÈ_(k®°i)’nÓ}µƒÉ»»›.‘⁄…ʺ∞µΩ“ª–©‘Oljµƒ‘O”ãïr(sh®™),”…”⁄Œ“÷™◊R∑∂á˙≤ªèV,ÀºæS≤ªåíÈü,Õ˘Õ˘ï˛(hu®¨ )œ›»ÎÕ£ú˛≤ª«∞µƒ†ÓëB(t®§i)ªÚ‘O”㵃—blj≤ª∫œ¿Ì.Æî¿œéü¡ÀΩ‚µΩŒ“µƒ¿ßªÛïr(sh®™),ï˛(hu®¨ )éÕ√¶Ã·π©‘O”ã∏≈ƒÓ∫Õ÷vΩ‚œ‡ÍP(gu®°n)÷™◊R,◊匓ƒ‹âÚ±MøϵƒÕÍ≥…œ‡ÍP(gu®°n)‘O”ã,Œ“”…÷‘µƒ∏–÷x¿œéüµƒéÕ÷˙.◊£¿œéü…ÌÛwΩ°øµ,…˙ªÓ”‰øÏ!
°°°°Œ““™∏–÷xŒ“µƒ–£Õ‚åßéüπ¢≈‡ù˝,‘⁄ÒR‰ìåç(sh®™)¡ïfl^(gu®∞)≥Ã÷–,À˚Ωo¡ÀŒ“‘S∂‡éÕ÷˙∫ÕπƒÑÓ,≤¢‘⁄åç(sh®™)€`∫ÕåW(xu®¶)¡ï…œΩo¡ÀŒ“∫‹∂‡÷∏åß, πŒ“‘⁄å£(zhu®°n)òI(y®®)ÀÆ∆Ω…œµ√µΩ¡À∫‹¥ÛµƒÃ·∏fl.∏–÷x»ŒˆŒ,‘⁄Œ“”ˆµΩ∑¬’Ê‹õº˛≤Ÿ◊˜¿ßÎyïr(sh®™),À˚œÚŒ“÷π©∑¬’Ê֢O÷√µƒÀº¬∑,≤¢«“’f(shu®≠)√˜‘O÷√µƒ‘≠“Ú.»Áπ˚ƒƒ“ªÀº¬∑≤ª––,À˚ÇÉ“≤ï˛(hu®¨ )ü·–ƒµƒ∫ÕŒ““ª∆∑÷Œˆ‘≠“Ú,÷˙Œ“Ω‚õQ¿ßªÛ.Îm»ªÀ˚“≤‘⁄√¶”⁄ÆÖòI(y®®)’쌃,µ´ «À˚»‘ï˛(hu®¨ )ΩoŒ“÷π©÷∏åß,fl@∑N∑Ó´Iæ´…Ò…Ó…Óµƒ∏–Ñ”(d®∞ng)÷¯(zh®¥)Œ“,¡ÌÕ‚,flÄ“™∏–÷x “”—èà∏£¡÷;Õ¨—– “µƒ√∑’Ò°¢˝è–°ø°°¢èàù˜°¢∫ÚÂ\ù˝°¢ÕÙÌw°¢‘¯‘î‹Sµ»,∏–÷xƒ„ÇÉ‘⁄æ´…Ò…œå¶Œ“µƒπƒÑÓ,“‘º∞‘⁄’쌃åë(xi®ß)◊˜÷–嶌“µƒéÕ÷˙.
°°°°◊Ó∫Û∏–÷xº“»Àµƒ÷ß≥÷.‘⁄Œ“◊x—–∆⁄Èg,Œ“æ´¡¶±»›^”–œfi,’˝⁄s…œº“¿Ô ¬«È±»›^∑±Îsµƒïr(sh®™)∫Ú,º“»À∂º“ª“ªÃé¿Ì∫√¡À,‘⁄…˙ªÓ…œ◊匓üo(w®≤)ën(y®≠u),◊匓ƒ‹âÚ∞≤–ƒµƒåW(xu®¶)¡ï,∏–÷xÀ˚ÇɵƒÛw’è∫Õ¿ÌΩ‚,≤¢«“‘⁄Œ“åë(xi®ß)’쌃∆⁄Èg”ˆµΩ¿ßÎy,º“»À∂ºï˛(hu®¨ )±M¡øµƒéÕ√¶å§’“ŸY¡œ,Ã·π©“ª–©Ω‚õQÀº¬∑∫Õ∑Ω∑®.Õ¨ïr(sh®™)œÚÍP(gu®°n)–ƒ∫ÕéÕ÷˙Œ“µƒÕ¨åW(xu®¶)°¢≈Û”—,œÚÖ¢≈c±æŒƒåèÈÜ°¢¥fiqµƒå£(zhu®°n)º“Ωà ⁄±Ì æ’\쥵ƒ÷x“‚!
°°°°Ö¢øºŒƒ´I
°°°°[1]ŸZï‘√Ù. ª˘”⁄“ï”X(ju®¶)–≈œ¢µƒπ§òI(y®®)ôC∆˜»À∞·fl\ºº–g(sh®¥)—–æø[D];[¥T ø].∫”ƒœ:∫”ƒœø∆ºº¥ÛåW(xu®¶),2013.
°°°°[2]Õıï˛(hu®¨ )”¿,–œ¡¶,¿ÓœÚƒ–,Õı±Ú,¿Ó∫∆ÃÏ.π§òI(y®®)ôC∆˜»Àµƒë™”√¨F†Óº∞∞l(f®°)’π∑÷Œˆ[J].ôCÎ人–g(sh®¥),2018(06):115-117.
°°°°[3]¸SŸt–¬.π§òI(y®®)ôC∆˜»ÀôC–µ ÷‘O”ã[J].—blj÷∆‘Ϻº–g(sh®¥),2012(03):220-221.
°°°°[4]–Ï«Ôª®,ıUѶ±Û,Âß–°Ω˘,Ñ¢÷æΩ≠.U –Õπ‹◊‘Ñ”(d®∞ng)…œ¡œœµΩyº∞∑Ω∑®:÷–á¯,201310104947.2[P].2013-06-19.
°°°°[5]Bugday M, Karali M. Design optimization of industrial robot arm to minimizeredundant weight[J]. Engineering Science and Technology, an International Journal,2019, 22(1): 346-352.
°°°°[6]Õı∑Â.ú\’Ñ¥Û–ÕìQü·∆˜µƒºº–g(sh®¥)flM(j®¨n)’π[J].ø∆ººΩõ(j®©ng)ù˙ –àˆ(ch®£ng),2015(06):7-8.
°°°°[7]Pedrocchi N, Villagrossi E, Cenati C, et al. Design of fuzzy logic controller ofindustrial robot for roughing the uppers of fashion shoes[J]. The International Journalof Advanced Manufacturing Technology, 2015, 77(5-8): 939-953.
°°°°[8]Õı≥¨,÷‹∫√±Û.‰ìπ‹ ’ºØ¡œøÚæèõ_—b÷√æ´¥_∂®Œªµƒë™”√[J].ø∆ºº≈cÑì(chu®§ng )–¬,2016(9):108-109.
°°°°[9]≤º»R∂˜·∞ÓÃÿ∆ù,√œ’—«‡.fl~œÚπ§òI(y®®) 4.0 ∫Õ÷«ƒ‹π§èS(ch®£ng)[J].…œ∫£Ÿ|(zh®¨)¡ø,2017(12):54-56.
°°°°[10]W Doggett. Robotic assembly of truss structures for space systems and future researchplans[J].Aerospace Conference,2002(7):1-10.
°°°°[11]MD Rhodes, CC Quach, RW Will. Verification tests of automated robotic assembly ofspace truss structures[J].Journal of Spacecraft & Rockets,1995,32(4):686-696.
°°°°[12]∫˙’˝¡x.ËϺ‹∆¨∞·fl\ôC–µ ÷Éû(y®≠u)ªØ‘O”ãº∞”ãÀ„ôC∑¬’Ê[D]:[¥T ø].Œ‰ùh:Œ‰ùh¿Ìπ§¥ÛåW(xu®¶), 2006.
°°°°[13]≤‹º“ˆŒ.“ª∑N∏flÀŸ÷ÿ›d¥a∂‚ôC∆˜»Àµƒ‘O”ã—–∞l(f®°)[D]:[¥T ø].ÃÏΩÚ:ÃÏΩÚ¥ÛåW(xu®¶), 2012.
°°°°[14]Õı±Î.ËϺ‹ôC∆˜»ÀÒÓ∫œÃÿ–‘∑÷Œˆ≈cΩYòãÉû(y®≠u)ªØ[D]:[¥T ø].∫œ∑ :∫œ∑ π§òI(y®®)¥ÛåW(xu®¶), 2017.
°°°°[15]≈£øµÕ¢.ËϺ‹ôC∆˜»Àfl\Ñ”(d®∞ng)åW(xu®¶)Ω®ƒ£°¢∂®Œª’`≤Ó∑÷Œˆº∞åç(sh®™)Úû—–æø[D]:[¥T ø].∫œ∑ :∫œ∑ π§òI(y®®)¥ÛåW(xu®¶), 2016.
°°°°[16]Ÿ°µù,‡áºŒ¯Q, Y”¿Ω°µ».√ÊœÚπP”õ±æÕ‚ö§…˙Æa(ch®£n)æÄ(xi®§n)µƒËϺ‹ôC∆˜»Àµƒ—–æø∫Õë™”√[J].≥£÷›¥ÛåW(xu®¶)åW(xu®¶)àÛ, 2015,27(1):11-15.
°°°°[17]ÅÜ§. ËϺ‹ ΩôC¥≤…œœ¬¡œôC∆˜»À∑÷Œˆ≈c∏ƒflM(j®¨n)‘O”ã[D].ñ|±±¥ÛåW(xu®¶),2014.
°°°°[18]óÓ”Ó,Ñ¢∫£ù˝,Ñ¢“˝µ‹.ª˘”⁄π§òI(y®®)ôC∆˜»Àµƒ◊‘Ñ”(d®∞ng)…˙Æa(ch®£n)æÄ(xi®§n)ΩMΩ®ºº–g(sh®¥)—–æø[J].…Ωñ|π§òI(y®®)ºº–g(sh®¥),2019(07):3.
°°°°[19]T Yoshikawa. Control algorithm for grasping and manipulation by multifingered robothands using virtual truss model representation of internal force[J].IEEE InternationalConference on Robotics & Automation,2000(1):369-376.
°°°°[20]÷‹œ£’¬,÷‹»´. »Á∫Œ’˝¥_flx”√ÎäÑ”(d®∞ng)ôC[M]. ±±æ©:ôC–µπ§òI(y®®)≥ˆ∞Ê…Á,2004.
°°°°[21]∫˙ëóŒØ.À≈∑˛ÎäôCÉû(y®≠u)ªØflx–Õ[J].◊‘Ñ”(d®∞ng)ªØë™”√,2018(03):136-138.
°°°°[22]ú´–¬÷€.”¿¥≈Õ¨≤ΩÎäôCµƒ ∏¡øøÿ÷∆œµΩy[D].’„Ω≠¥ÛåW(xu®¶),2005.
°°°°[23]–§ût,óÓΩÃ√,»´∑º≥…,¿Ó橵».À≈∑˛ÎäôCµƒflx–Õ‘≠Ñt≈c”ãÀ„[J].ôC¥≤≈c“∫â∫,2014,42(22):44-49.
°°°°[24]∑∂¡¶ïF,Ñ¢Ω®π¶,èàΩ®…˙.À≈∑˛µ∂º‹ÎäôCµƒflx–Õ—–æø[J].ôCÎäπ§≥úº–g(sh®¥),2008,37(12):87-88.
°°°°[25]∫˙ëóŒØ.ËϺ‹ôC–µ ÷À≈∑˛ÎäôCflx–Õ[J].◊‘Ñ”(d®∞ng)ªØë™”√,2018(02):135-136.
°°°°[26]÷‹∂¨’‰,¿ÓÈ_(k®°i)√˜.ÜŒÚåÉ…¬ì(li®¢n)Ñ”(d®∞ng)÷±æÄ(xi®§n)≥fl∂»æC∫œ[J].ôC–µ÷∆‘Ï≈c◊‘Ñ”(d®∞ng)ªØ,2017,46(03):17-20.
°°°°[27]ÍêÏÿ,‘¨’Ê,¿Ó–Ò.÷±òÀôC∆˜»Àµƒ‘O”ã—–æø[J].¨F¥˙÷∆‘Ϻº–g(sh®¥)≈c—blj,2018(10):61-64.
°°°°[28]Œƒï‘Íñ(y®¢ng).î[±€–Õ“∫â∫ôC–µ ÷ΩYòãº∞Ãÿ–‘∑÷Œˆ[J].◊‘Ñ”(d®∞ng)ªØë™”√,2019(01):105-106.
°°°°[29]¸SÇ•¡·.ª˘”⁄ PLC µƒö‚Ñ”(d®∞ng)∞·fl\ôC–µ ÷‘O”ã[J].√∫µVôC–µ,2009,30(10):20-21.
°°°°[30]ñ|∑ΩÒRfl_.üo(w®≤)À¢ÎäÑ”(d®∞ng)ôC BMU œµ¡– 30W/60W/120W π”√’f(shu®≠)√˜ï¯(sh®±)[S].2016.
°°°°[31]ñ|∑ΩÒRfl_.üo(w®≤)À¢ÎäÑ”(d®∞ng)ôC BMU œµ¡–[S].2017.
°°°°[32]≤‹ºŒº—.ª˘”⁄À≈∑˛Îä∏◊µƒ∂®Œªøÿ÷∆œµΩy‘O”ã[J].…Ωñ|π§òI(y®®)ºº–g(sh®¥),2018(22):107.
°°°°[33]èàæ˝∆G.ª˘”⁄À≈∑˛Îä∏◊ÚåÑ”(d®∞ng)µƒ PLC ŒÔ¡œ¥Êɶ—b÷√øÿ÷∆œµΩy‘O”ã[J].ôCÎ䓪ÛwªØ,2014(7):66-69.
°°°°[34]Bodneva,O.J. Ilegbusi,M.A. Kozhushner,K.S. Kurmangaleev,V.S. Posvyanskii,L.I.
°°°°[35]Œ‰éõ.ú\ŒˆÇ˜∏–∆˜ºº–g(sh®¥)‘⁄ôC–µÎä◊”÷–µƒë™”√[J].…Ωñ|π§òI(y®®)ºº–g(sh®¥),2019(07):161.
°°°°[36]…œ∫£∑®√˜Îäö‚”–œfiπ´Àæ.Ω”Ω¸È_(k®°i)ÍP(gu®°n) YB œµ¡–[S].2018.
°°°°[37]÷‹»∆Ω,¿Ó‘ˆπ‚.äAö§¬ì(li®¢n)›S∆˜∏ƒ–Õ‘O”ã—–æø[J].÷–ᯖfi¥¨,2005(05):29-31.
°°°°[38]–§–¬Œ‰.äAö§ Ωª¨âK¬ì(li®¢n)›S∆˜µƒÆa(ch®£n)…˙º∞Ãÿ¸c(di®£n)[J].¥uÕfl,2009(12):35-36.
°°°°[39]ÕøÚE¯Q.äAö§¬ì(li®¢n)›S∆˜µƒ’{’˚≈cæS◊o[J].¥uÕfl,2008(02):48.
°°°°[40]∑Ω¥Û«ß,÷Ï’˜ù˝. åç(sh®™)”√ÎäÑ”(d®∞ng)ôCÀŸ≤ÈÀŸÀ„ ÷É‘[M]. ±±æ©:ªØåW(xu®¶)π§òI(y®®)≥ˆ∞Ê…Á,2013.
°°°°[41]≥…¥Ûœ». ôC–µ‘O”ã ÷É‘[M]. ±±æ©:ªØåW(xu®¶)π§òI(y®®)≥ˆ∞Ê…Á,2017.
°°°°[42]èàæß¡¡.˝Xólǘє(d®∞ng)œµΩyµƒÀŸ∂»º∞∂®Œªøÿ÷∆‘O”ã[J].√∫µVôCÎä,2019,40(01):17-19.
°°°°[43]Âß¡ºŸF,ºo√˚ÑÇ. ôC–µ‘O”ã[M]. ±±æ©:∏flµ»ΩÔ˝≥ˆ∞Ê…Á,2013.
°°°°[44]“Û¯ô¡∫,÷Ï∞ÓŸt. ˝X›Üfl\Ñ”(d®∞ng)ôCòã‘O”ã[M]. …œ∫£:…œ∫£ø∆åW(xu®¶)ºº–g(sh®¥)≥ˆ∞Ê…Á. 1996.
°°°°[45]π˘∆Ωæ˘,ÕıÇ•.øÏÀŸ’{’˚µ˙–Œèóª…ΩMæoµƒ—b÷√[J].÷∆‘Ϻº–g(sh®¥)≈côC¥≤,2013(08):117+121.
°°°°[46]èà”Ò‚x.≤ªÕ£‹á(ch®•)èóª…äAÓ^äAæo—b÷√[J].ôC–µπ§»À.¿‰º”π§,1984(09):13.
°°°°[47]øµ øÕ•,ÖŒΩ®á¯. ANSYS Workbench14.0 ”–œfi‘™∑÷Œˆ»ÎÈT(m®¶n)‘îΩ‚≈cåç(sh®™)¿˝[M]. ±±æ©:»À√Ò‡]Îä≥ˆ∞Ê…Á,2013.
°°°°[48]÷‹æÊ,ÃKΩ”¢. ANSYS Workbench ”–œfi‘™∑÷Œˆåç(sh®™)¿˝÷vΩ‚[M]. ±±æ©:»À√Ò‡]Îä≥ˆ∞Ê…Á,2017.
°°°°[49]Ñ¢∆Ω∞≤,ª±Ñì(chu®§ng )∑Â. ‘îΩ‚ ANSYS ”–œfi‘™∑÷Œˆ[M].±±æ©:Îä◊”π§òI(y®®)≥ˆ∞Ê…Á,2018.
°°°°[50]ÅÜ§. ËϺ‹ ΩôC¥≤…œœ¬¡œôC∆˜»À∑÷Œˆ≈c∏ƒflM(j®¨n)‘O”ã[D].ñ|±±¥ÛåW(xu®¶),2014.
°°°°[51]Ñ¢≥¨∑Â,èà¥æ,èàπ¶åW(xu®¶).ª˘”⁄ ANYSY µƒ∏flÀŸº”π§÷––ƒ÷˜›Sœ‰”–œfi‘™∑÷Œˆº∞Éû(y®≠u)ªØ[J].ΩM∫œôC¥≤≈c◊‘Ñ”(d®∞ng)ªØº”π§ºº–g(sh®¥),2010(07):26-28+34.
°°°°[52]¿ÓÍñ(y®¢ng),ÕÙòsÌò,Õı≤ ¿Ú. π”√ ANSYS å¶ëT–‘¡¶◊˜”√œ¬µƒµÕúÿΩ^ü·ö‚∆øflM(j®¨n)––뙡¶∑÷Œˆ≈cÉû(y®≠u)ªØ[J].µÕúÿ≈c≥¨åß,2009,37(11):5-9.