24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
在機構設計、綜合以及并聯(lián)機器人應用中,機構可動(dòng)性的識別不僅能幫助機構在精確點(diǎn)間更加連續平滑的運動(dòng),也能幫助提高機械產(chǎn)品設計的效率和經(jīng)濟性。
本文嘗試提出一種相對系統的理論分析方法,對一系列復雜平面多連桿機構進(jìn)行可動(dòng)性運動(dòng)特性研究。并設計計算機輔助識別軟件,自動(dòng)識別兩種典型平面六連桿機構的運動(dòng)特征。主要研究?jì)热萑缦拢?/p>
(1)Stephenson 型單自由度平面六連桿機構分支識別研究對Stephenson型單自由度平面六連桿機構的四桿鏈和外五桿鏈建立運動(dòng)模型,判斷四桿鏈的死點(diǎn)個(gè)數之間、輸入輸出曲線(xiàn)以及機構類(lèi)型。引入關(guān)節旋轉空間(JRS)的概念,對外五桿鏈的運動(dòng)范圍進(jìn)行分析,并結合兩環(huán)的耦合狀態(tài)分析機構的所有分支和奇異點(diǎn),并聯(lián)合 Sylvester 結式消元法得到 Stephenson 型平面六連桿機構不同輸入輸出之間的關(guān)系。
(2)Watt 型單自由度平面六連桿機構完全旋轉性研究分析 Watt 型單自由度平面六連桿機構的四桿鏈和外六桿鏈兩個(gè)環(huán)路的耦合關(guān)系,引入子分支的概念,得到 Watt 型機構的完全旋轉特性,并結合實(shí)例對 Watt型機構的分支和奇異點(diǎn)、運動(dòng)缺陷及運動(dòng)順序進(jìn)行分析。
(3)帶移動(dòng)副平面連桿機構可動(dòng)性識別研究引入移動(dòng)副,得到帶移動(dòng)副平面五連桿機構的曲柄存在條件,并結合帶移動(dòng)副四桿鏈和五桿鏈的相互作用關(guān)系,得到帶移動(dòng)副平面六連桿機構的極限位置點(diǎn)及其具體構型,以及不同關(guān)節間的輸入輸出關(guān)系,并總結出機構的分支和子分支識別方法。
(4)多自由度平面連桿機構分支識別研究引入多自由度多環(huán)路復雜平面連桿機構,包括二自由度平面七連桿機構和三自由度平面八連桿機構,通過(guò)分析兩種機構兩環(huán)路的耦合狀態(tài),得到兩種機構的極限位置并進(jìn)一步研究?jì)煞N機構的分支及其可動(dòng)性運動(dòng)特性。
(5)平面單自由度六連桿機構自動(dòng)識別輔助軟件基于對平面六連桿機構運動(dòng)特性的理論分析,通過(guò) MFC 搭建二級界面,設計計算機輔助識別軟件,對一定參數下的 Stephenson 型和 Watt 型平面六連桿機構的輸入輸出曲線(xiàn)、分支、分支點(diǎn)及鼠標所在點(diǎn)的位置自動(dòng)識別,并將計算機輔助軟件的識別結果與理論結果進(jìn)行比較,結果顯示軟件精度良好,具有一定有效性。
綜上所述,本研究建立一種可動(dòng)性性識別方法,對一系列多環(huán)平面連桿機構進(jìn)行研究,得到機構的奇異性、運動(dòng)缺陷和運動(dòng)范圍,并設計計算機輔助設計軟件,對平面六連桿機構的分支進(jìn)行自動(dòng)識別。
關(guān)鍵詞:連桿機構,多環(huán),分支,關(guān)節旋轉空間,可動(dòng)性,自動(dòng)識別
Abstract
In the design and synthesis of linkages and the application of parallel robots, the mobility identification of linkages can not only help the linkages move smoothly between precise points, but also can help to improve the efficiency and economy of the design of mechanical products. This paper tries to put forward a theoretical analysis method to study the mobility of planar multi-loop linkages. And a computer aided software is designed to identify the kinematic characteristics of two planar six-bar linkages. The main contents of the research are as follows:
(1) Branches identification research for Stephenson planar six-bar linkage with single degree of freedom The kinematic models of the four-loop chain and the external five-loop chain of the Stephenson planar six-bar linkage with single degree of freedom are established. The relationship among the input and output curves of the four-loop chain, the type of the linkages and the number of dead points are analyzed. Introducing the concept of joint rotation space, the kinematic ranges of the external five-loop chain is analyzed. And relationship between different inputs and outputs of the Stephenson six-bar linkage is obtained by combining the coupling state of the two loops and the Sylvester elimination method.
(2) Full rotatability research for Watt planar six-bar linkage with single degree of freedom In this paper, the coupling relationship between the four-loop chain and the external six-loop chain of the Watt planar six-bar linkage with single degree of freedom is analyzed. And the complete rotation characteristics of the Watt linkage are obtained. Introducing the concept of sub-branch.Given an example, and the motion ranges , the motion defects and motion sequences of Watt linkage were analyzed.
(3) Mobility research for planar linkages with sliding pairs Introducing sliding pairs, the existence condition of the crank of the planar five-bar linkage with sliding pairs is obtained. Combined with the interaction between four-bar linkages and five-bar linkages with sliding pairs, the specific configurations of the limited positions of planar six-bar linkages with sliding pairs are obtained, including dead points, branch points. And input-output relation and the joint rotation space are discussed. And the identification method of branches and sub-branches of six-bar linkages with two or three sliding pairs are summarized.
(4) Branches identification research for planar linkage with multi degree of freedom Introduce complex planar linkages with multi degree of freedom, including planar seven-bar linkage with two degree of freedom and planar eight-bar linkage with three degree of freedom. Through the analysis of the coupling state of two loop, the limit positions of two kinds of linkages and other motion characteristics of the two linkages can be obtained.
(5) Auto branches identification software for planar six-bar linkages Based on the theoretical analysis of the kinematic characteristics of planar six-bar linkages, a two-level interface is built by MFC. And a computer aided identification software is designed to identify the mouse point position of two typical planar six-bar linkages. The the relationships between the input and output of the two six-bar linkages with certain connecting link parameters are obtained automatically. And the branch points which hinder the smooth motion of the two six-bar linkages are identified.
To sum up, a relative systematic theoretical analysis method is established in this paper. A series of kinematic characteristics of multi-loop planar linkages are researched.
And the singularity, motion defects and motion ranges of the linkages are obtained. And a computer aided design software is designed to identify the branches of planar six-bar linkage automatically.
Keywords: linkages, multi-loop, branches, joint rotation space, automatic identification
復雜多連桿機構的可動(dòng)性問(wèn)題是機構綜合和設計中最基本最困難的問(wèn)題之一。可動(dòng)性是指機構運動(dòng)的連續性(分支、裝配方式或回路)、平滑性(子分支或無(wú)奇異的構形空間)、完全旋轉性、運動(dòng)缺陷和運動(dòng)順序。其中,完全旋轉性是指輸入鏈接完成旋轉連續平滑的能力。分支指的是一個(gè)連桿機構的構型空間,在這個(gè)配置空間中連桿機構可實(shí)現連續的變換。分支條件是運動(dòng)鏈的一個(gè)基本性質(zhì),與輸入或固定的連桿無(wú)關(guān)。一般來(lái)說(shuō),對于各種連桿可動(dòng)性問(wèn)題,應該首先識別和糾正分支。運動(dòng)缺陷指的是兩個(gè)分支之間,機構不能通過(guò)連續運動(dòng)所達到的位置。機構的運動(dòng)缺陷對機構的連續運動(dòng)是致命的,機構在給定輸入條件,避免機構的運動(dòng)缺陷對機構的連續運動(dòng)有很重要的研究意義。運動(dòng)順序指的是機構在一個(gè)完整的運動(dòng)中,各個(gè)分支之間的相關(guān)關(guān)系。子分支指的是一個(gè)連桿機構的連續的構型空間,在子分支內,機構可以連續、平滑的運動(dòng)且不存在任何奇異點(diǎn)。
識別和掌握機構的運動(dòng)特性、運動(dòng)機理和裝配方式是機構創(chuàng )新設計中最基本的問(wèn)題。因此,在機構設計、綜合以及并聯(lián)機器人應用中,必須保證機構在各精確點(diǎn)之間運動(dòng)的連續性和平滑性,才能有效避免機構設計和綜合中的因可動(dòng)性引起的缺陷問(wèn)題。
本課題研究?jì)热菰醋杂赥201505湖北省教育廳項目“并聯(lián)機器人及其先進(jìn)制造裝備關(guān)鍵技術(shù)研究”。本課題的研究意義在于:
(1)建立平面多環(huán)連桿機構可動(dòng)性運動(dòng)特征的識別方法和理論,為并聯(lián)機械結構與機器人的設計和創(chuàng )新提供系統的理論方法。
(2)將計算機程序應用于 Stephenson 型和 Watt 型平面單自由度六連桿機構的運動(dòng)綜合中,快速得到機構分支、分支點(diǎn)和運動(dòng)缺陷的解集,從而大大縮短設計周期,提高設計質(zhì)量。本項目研究成果對豐富和完善機構運動(dòng)綜合理論,對指導高性能機構和機器設計及工程應用具有積極意義。
平面多環(huán)連桿機構在工業(yè)上具有廣泛的應用,例如可以用作機器人手臂實(shí)現精密復雜的運動(dòng),在軍事、航海等領(lǐng)域作為模擬器或對接器使用,另外,復雜的多環(huán)連桿機構還可以運用在醫療康復等領(lǐng)域。在對平面多環(huán)連桿機構可動(dòng)性的判斷中。鄒炎火、郭曉寧[1-3]等運用結方程消元法和正切半角替換,得到 Stephenson型平面六連桿機構的死點(diǎn),進(jìn)而根據機構回路的特點(diǎn)對 Stephenson 型平面六連桿機構的曲柄存在與否進(jìn)行了判斷。沈惠平[4]等證明了 POC 法可以有效分析多環(huán)耦合并聯(lián)機構的運動(dòng)學(xué)及動(dòng)力學(xué)。韓建友教授[5-9]建立解域綜合理論,通過(guò)解曲線(xiàn)的映射特點(diǎn)分析復雜平面連桿機構的運動(dòng)缺陷和有效的運動(dòng)范圍。孫艷、楊隨先[10-11]等運用球面三角學(xué),建立球面四連桿機構的約束方程,并將球面六連桿機構分成球面四連桿機構和一個(gè)球面二桿組,得到球面四連桿機構和球面二桿組相互作用下整個(gè)球面六連桿機構的曲柄存在條件。楊廷力[12]等對機構綜合的幾種主要方法進(jìn)行了比較研究,得到基于方位特征的機構綜合研究方法可得到機構存在的幾何條件的一般性,而結構學(xué)基本方程對機構的研究意義明確且易于操作。羅維[13]等對二自由度柔性鉸鏈六連桿機構進(jìn)行了分析,基于虛功原理對機構建立了偽剛體模型,進(jìn)而進(jìn)行仿真,得到相關(guān)轉角間的數學(xué)關(guān)系,并將仿真值和理論值進(jìn)行對比,證明了該理論的正確性。宋杰、梅瑛[14-16]等引入虛桿的概念,將 PRR-RRP 型六連桿機構等效成四連桿機構,推導出六連桿機構桿件在不同長(cháng)度下的曲柄存在條件。朱偉[17]等引進(jìn)等效 4R 回路,運用螺旋理論分析了并聯(lián)機構及桿長(cháng)對機構奇異位置的影響。吳鑫、陳美麗[18]等在有序單開(kāi)鏈原理上,對 2T1R 并聯(lián)機構的自由度和運動(dòng)輸出進(jìn)行了分析,討論了 2T1R 并聯(lián)機構的幾種奇異位形,并繪出機構奇異時(shí)的位姿情況。胡俊杰、韓建友等[19]給出了一種空間 5-CS 機構,并利用旋量理論、牛頓迭代法等多種理論方法對該種機構的運動(dòng)缺陷給出了判斷。朱立紅、張良等[20]在克利福德代數中的運動(dòng)學(xué)映射理論的基礎上,提出對平面桿組機構的運動(dòng)綜合方法,該方法可以擴大擬合誤差容許范圍,得到更多的近似解,使機構達到給定的運動(dòng)位姿。孫永國[21]等基于簡(jiǎn)化函數,將 Watt 型六連桿機構分為四連桿機構和二桿機構,對 Watt 型六連桿機構進(jìn)行仿真和優(yōu)化。董慧敏和王德倫[22]對平面機構連桿提出曲線(xiàn)局部自適應擬合方法,建立 Stephenson 型六連桿機構函數綜合的數學(xué)模型,保證了機構精度的優(yōu)化求解。王敏杰、閆敏鋒[23]等在 Matlab 中建立了平面六桿機構的 Simulink 仿真模型,對機構速度和加速度進(jìn)行仿真分析。王君[24]等結合歐拉環(huán)方程、結合三角換元、多項方程判別法和 Sylvester 消元法,得到輸入輸出角同時(shí)在四連桿鏈或不同時(shí)在四連桿鏈條件下的輸入輸出關(guān)系曲線(xiàn)。張艷華[25]等利用 CAD 軟件,對平面機構進(jìn)行幾何約束和尺寸約束等,構造平面模擬機構,并根據機構的特點(diǎn)和實(shí)際工作載荷,對機構的動(dòng)力學(xué)進(jìn)行分析。
張義民[26]等人研究了平面機構運動(dòng)副的間隙誤差,利用虛位移原理和建立數學(xué)模型,得到了機構末端誤差表達方程。牛雪梅、高國琴等[27]提出了一種三自由度驅動(dòng)冗余并聯(lián)機構,該機構具有 2 個(gè)轉動(dòng)自由度和 1 個(gè)平動(dòng)自由度,通過(guò)分析機構各構件對驅動(dòng)力的影響,得到了該機構的簡(jiǎn)化方案。沈惠平等[28]基于機構的拓撲特性,分析了 39 中不同結構類(lèi)型的 6-SPS 并聯(lián)機構的位置正解的全部實(shí)數解,且該方法具有一般性。姜峣[29]等建立平面 2 自由度過(guò)約束并聯(lián)力和力矩的平衡方程以及位置誤差之間的補充方程,對機構進(jìn)行了動(dòng)力學(xué)建模并進(jìn)行了求解。陳修龍[30]對五自由度并聯(lián)機器人建立了動(dòng)力學(xué)模型,對機構的運動(dòng)學(xué)進(jìn)行了反解,并利用 Matlab軟件和 Adams 軟件仿真和模擬,驗證了動(dòng)力學(xué)模型的正確性。王庚祥[31-32]等人建立 4-SPS/CU 并聯(lián)機構的模型,并對該機構的動(dòng)力學(xué)進(jìn)行了分析,并分析了關(guān)節摩擦力對其動(dòng)力學(xué)特性的影響。楊金堂[33]等通過(guò)空間機構的自由度計算方法,得到三連桿三移動(dòng)副、四連桿四移動(dòng)副和五連桿五移動(dòng)副平面機構的自由度進(jìn)行了計算,并分析該計算方法的使用條件等。羅阿妮[34]等利用振動(dòng)分析方法,對帶彈簧的雙滑塊機構建立了數學(xué)模型,并對機構鉸鏈和移動(dòng)副間隙進(jìn)行分析,結合各構件的受力,得到機構的動(dòng)力學(xué)方程以及間隙對機構運動(dòng)精度的影響。李發(fā)展[35]等對平面五連桿機構的轉動(dòng)副的間隙進(jìn)行分析,利用 Matlab 進(jìn)行仿真分析,得到間隙對機構位置精度的影響,并利用遺傳算法,調節機構桿長(cháng)參數使誤差最小。
路敦民[36]等人基于 Matlab 中的 SimMechanics 和 Simulink 工具對一種人機合作機器人進(jìn)行了動(dòng)力學(xué)仿真,分析了其在自由模方程和約束模方程下的性能。于紅英[37]等分析了平面五連桿機構的動(dòng)力學(xué)和運動(dòng)學(xué)性能,得到機構的運動(dòng)學(xué)正解和逆解,進(jìn)而基于 Kane 動(dòng)力學(xué)分析了機構的動(dòng)力學(xué)性能。陳根良[38]基于牛頓歐拉方程,提出對一般空間并聯(lián)機構的通用建模和仿真方法,并以 6-UPS 型空間并聯(lián)機構為例建立模型,驗證了該方法的有效性。馬承文和鄒慧君[39]分析了二自由度平面五連桿機構的運動(dòng)學(xué),通過(guò)改變桿長(cháng)和質(zhì)量,得到機構滿(mǎn)足解耦合的條件。季曄[40]等根據四自由度并聯(lián)機構的運動(dòng)特性得到機構輸入輸出關(guān)系,建立機構的動(dòng)力學(xué)模型,并運入 3 種不同的靜態(tài)摩擦模型,得到摩擦對機構驅動(dòng)力以及運動(dòng)副約束反力的影響。
典型平面六連桿機構原理設計:
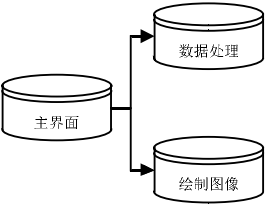
平面雙環(huán)六連桿機構的主界面功能
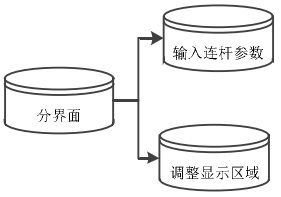
平面雙環(huán)六連桿機構的次級界面功能
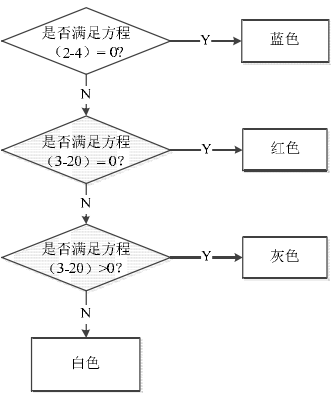
Watt型平面六連桿機構程序繪圖邏輯
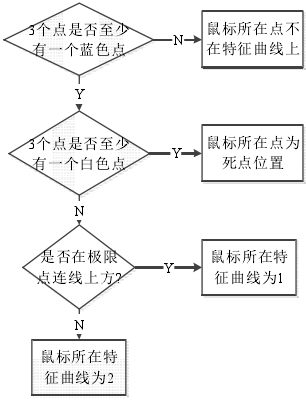
鼠標中心點(diǎn)識別邏輯
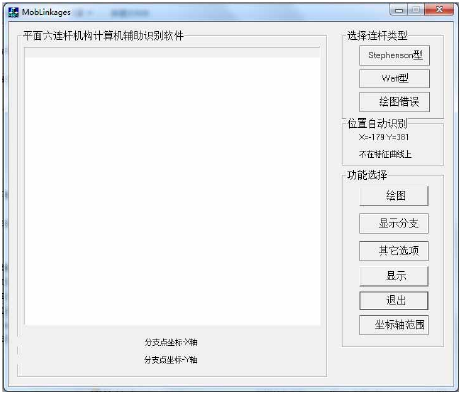
主界面
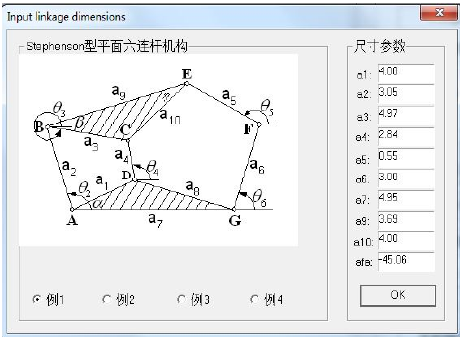
Stephenson型平面六連桿機構參數輸入界面
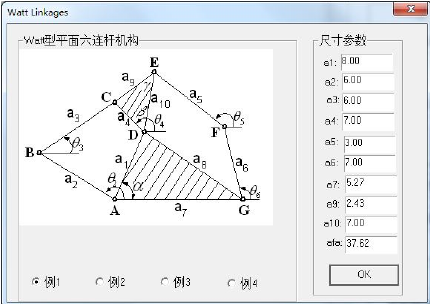
Watt型平面六連桿機構參數輸入界面
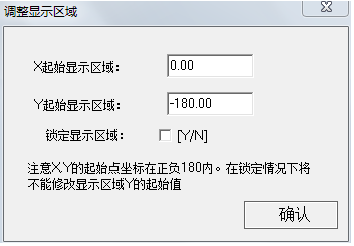
選擇坐標顯示區域
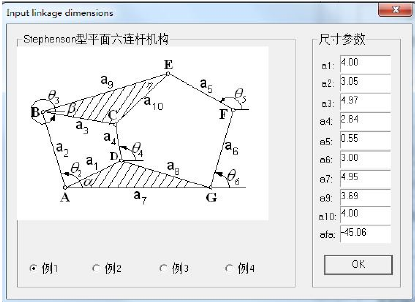
Stephenson型機構實(shí)例尺寸參數(有分支點(diǎn))
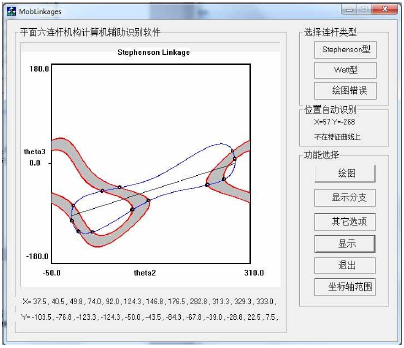
Stephenson型機構計算機軟件識別實(shí)例(有分支點(diǎn))
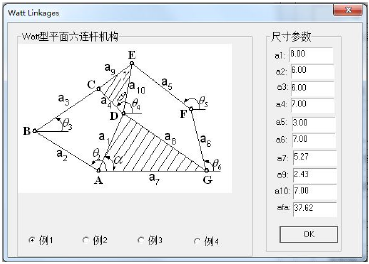
Watt型機構實(shí)例尺寸參數(有分支點(diǎn))
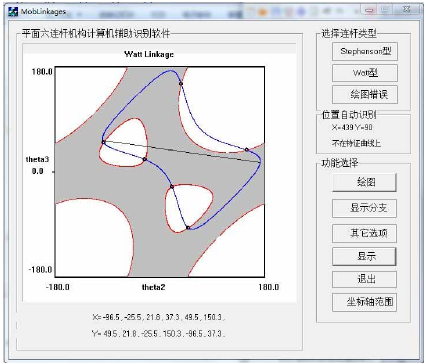
Watt型機構計算機軟件識別實(shí)例(有分支點(diǎn))
目 錄
摘 要
Abstract
目 錄
第 1 章 緒 論
1.1 課題研究的目的及意義
1.2 平面多環(huán)連桿機構的研究概況
1.2.1 國內外研究現狀
1.2.2 平面多環(huán)連桿機構的分析和綜合研究
1.3 課題主要研究工作和全文結構
第 2 章 Stephenson 型平面六連桿機構分支識別
2.1 概述
2.2 平面四桿鏈的死點(diǎn)判別
2.3 Stephenson 型平面六連桿機構的分支點(diǎn)的識別
2.4 基于 Sylvester 消元法的輸入輸出關(guān)系識別
2.5 實(shí)例驗證
2.6 本章小結
第 3 章 Watt 型平面六連桿機構完全旋轉性分析
3.1 概述
3.2 Watt 型六連桿機構的分支識別
3.2.1 Watt 型六連桿機構環(huán)路判斷
3.2.2 輸入輸出不同在四桿鏈的 Watt 型平面六連桿機構分支識別
3.3 Watt 型平面六連桿機構機構的子分支
3.4 實(shí)例驗證
3.5 本章小結
第 4 章 帶移動(dòng)副平面多桿機構的可動(dòng)性識別
4.1 概述
4.2 帶移動(dòng)副平面五連桿機構的分支識別及曲柄存在條件
4.2.1 帶移動(dòng)副平面五連桿機構的關(guān)節旋轉空間
4.2.2 帶移動(dòng)副平面五連桿機構的曲柄存在條件及分支識別
4.3 帶移動(dòng)副平面六連桿機構的分支識別
4.3.1 帶移動(dòng)副四桿鏈死點(diǎn)識別
4.3.2 帶移動(dòng)副五桿鏈的關(guān)節旋轉空間
4.3.3 帶移動(dòng)副平面六連桿機構分支識別方法
4.3.4 帶移動(dòng)副六連桿機構雅克比矩陣分析方法
4.4 實(shí)例驗證
4.4.1 帶兩個(gè)移動(dòng)副平面六連桿機構分支及死點(diǎn)判斷實(shí)例
4.4.2 帶三個(gè)移動(dòng)副平面六連桿機構分支及死點(diǎn)判斷實(shí)例
4.4.3 基于雅克比矩陣的帶移動(dòng)副六連桿機構分支分析方法實(shí)例
4.5 本章小結
第 5 章 多自由度平面雙環(huán)連桿機構的分支識別
5.1 概述
5.2 二自由度平面七連桿機構的分支識別方法
5.3 三自由度平面八連桿機構的分支識別方法
5.4 實(shí)例驗證
5.5 本章小結
第 6 章 平面單自由度六連桿機構計算機輔助識別軟件
6.1 概述
6.2 計算機輔助軟件框架搭建
6.3 特征點(diǎn)識別過(guò)程
6.3.1 分支點(diǎn)識別過(guò)程
6.3.2 鼠標所在點(diǎn)的位置自動(dòng)識別
6.4 軟件界面設計
6.4.1 主界面說(shuō)明
6.4.2 二級界面說(shuō)明
6.5 計算機輔助軟件識別實(shí)例
6.5.1 Stephenson 型平面六連桿機構計算機輔助軟件實(shí)例
6.5.2 Watt 型平面六連桿機構計算機輔助軟件實(shí)例
6.6 本章小結
第 7 章 總結與展望
7.1 全文總結
7.2 工作展望
參考文獻
致 謝
附錄:攻讀碩士學(xué)位期間的成果
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)