24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要
在計算機視覺(jué)技術(shù)中,運動(dòng)目標檢測是重要的研究方向之一,它需要對大量信息數據進(jìn)行分析,并且對實(shí)時(shí)性要求較高,因此圖像處理速度非常關(guān)鍵。鑒于 ARM的片上系統具有體積小、功耗低、速度快等優(yōu)點(diǎn),它能夠很好支持 OpenCV 庫的運行,因此,基于 ARM 的片上系統在圖像處理中有著(zhù)廣泛的應用前景。
本學(xué)位論文首先對運動(dòng)檢測在國內外的研究背景進(jìn)行了分析,并且對目前主流的運動(dòng)檢測算法進(jìn)行了比較。由于 ViBe 算法對運動(dòng)目標的檢測效果良好,并且算法本身時(shí)間復雜度較低,非常適合在 ARM 架構下運行。因此,本文選擇 ViBe算法作為論文的運動(dòng)檢測算法。傳統的圖像處理都是在 x86 架構下進(jìn)行運行,相應的處理器芯片存在高成本和高功耗等缺點(diǎn),因此,本學(xué)術(shù)論文提出并實(shí)現了基于A(yíng)RM 架構和 Linux 系統上的運動(dòng)檢測系統。在硬件設計方面,本論文對圖像傳感器和圖像數據緩存方案進(jìn)行對比分析。由于本文中對圖像的目標細節描述要求較低,因此圖像傳感芯片采用成本較低的 CMOS 傳感器 OV9650,并針對 OV9650 編寫(xiě)了相應的驅動(dòng)程序,同時(shí)為提高 CPU 的運行效率,對現有的環(huán)形緩存區的數據填充機制進(jìn)行了改進(jìn)。
盡管 ViBe 算法檢測結果良好,具有算法的時(shí)間復雜度較低的優(yōu)點(diǎn),但檢測運動(dòng)目標時(shí)存在空洞現象和鬼影現象。為了進(jìn)一步提高對于運動(dòng)檢測的準確度,本文提出了 ViBe 算法的改進(jìn)算法。為了解決 ViBe 算法檢測初期出現的鬼影現象的問(wèn)題,本論文提出一種 ViBe 與幀間差分聯(lián)合優(yōu)化算法。它使用三幀差分法更新 ViBe算法的背景模型,加快對于背景誤判的消除,鬼影現象問(wèn)題得到解決。同時(shí),為了解決 ViBe 算法在實(shí)際檢測環(huán)境中產(chǎn)生的空洞現象,本文使用了形態(tài)學(xué)中膨脹、腐蝕的操作。本學(xué)位論文對 ViBe 算法的改進(jìn)解決了 ViBe 算法存在的空洞現象和鬼影現象等問(wèn)題,大大提高了目標檢測的準確性。
最后,通過(guò)大量的實(shí)驗驗證和數據分析,本文在 Linux 系統下對改進(jìn)后的 ViBe算法極大地提高了運動(dòng)物體檢測的準確度,該系統的應用場(chǎng)景也得到了擴展。
關(guān)鍵詞:嵌入式 Linux,攝像頭驅動(dòng),OpenCV,運動(dòng)檢測,ViBe 算法
Abstract
Motion detection research plays a significant role in computer vision technology. It requires instantaneity and analysis of enormous data. Therefore the speed of processing images is the key factor. Taking advantages of System on Chip, such as small size, low power consumption and fast speed as well as its compatibility with OpenCV Base, ARM chips have a bright prospect to serve the development of image processing. Firstly,the researchbackground of motiondetection at home and abroad is analyzed, and the current motion detection algorithm is compared in this thesis. Because the ViBe algorithm has good performance on the detection of moving objects, and the algorithm itself is less time-intensive, it is very suitable for running under the ARM architecture.
Therefore, the ViBe algorithm is used as the motion detection algorithm in this thesis. The traditional image processing runs under the x86 architecture, and the corresponding processor chip has the disadvantages such as high cost and high power consumption, therefore, the motion detection system based on ARM architecture and Linux system is proposed and implemented in this thesis. In the aspect of hardware design, the image sensor and image data caching scheme are compared and analyzed. Since the description of the details of the image is less demanding, the low cost CMOS sensor OV9650 is used as the image sensor chip in this thesis. And the driver for OV9650 is coded. At the same time, in order to improve the operating efficiency of CPU, the data filling mechanism of existing ring buffer area is improved.
Although the ViBe algorithm has good detecting performance and has the advantages of low time complexity, there are problems of void phenomena and ghost phenomena when detecting moving objects. In order to further improve the accuracy of motion detection, an improved algorithm based on ViBe algorithm is proposed. In order tosolvetheproblemof ghostingphenomenonintheearlydetectionusingViBe algorithm, a joint optimization algorithm of ViBe algorithm and interframe difference algorithm is proposed. The three-frame difference method is used to update the background model of the ViBe algorithm in order to speed up the elimination of the background miscarriage of justice, thus the problem of ghost phenomenon is solved. At the same time, in order to solve the void phenomenon in the actual detection environment using ViBe algorithm, the operation of expansion and corrosion in morphology is employed in this thesis. The proposed algorithm based on ViBe algorithm solves the problems of void phenomenon and ghost phenomenon, therefor the accuracy of target detection is greatly improved. Finally, the large number of experimental verification and data analysis show that the improved algorithm based on ViBe algorithm under Linux system greatly improves the accuracyof movingobjectdetection,andthe applicationscene of this system hasbeen extended.
Keywords: Embedded Linux, Camera Drive, OpenCV, Moving Detection, ViBe Algorithm
自二十世紀九十年代 Intel 公司發(fā)行開(kāi)源跨平臺計算機視覺(jué)庫以來(lái),計算機視覺(jué)無(wú)論在科研領(lǐng)域還是工程應用領(lǐng)域都得到廣泛應用,目前計算機領(lǐng)域研究的熱點(diǎn)方向之一就是利用計算機強大的計算功能實(shí)現圖像視覺(jué)感知技術(shù)[1]。計算機視覺(jué)是通過(guò)使用計算設備對人類(lèi)視覺(jué)的一種仿真,它的主要任務(wù)是通過(guò)對獲得的圖片進(jìn)行計算、分析從而挖掘必要的信息[2]。計算機視覺(jué)是實(shí)現機器視覺(jué)、智能監控、目標追蹤等眾多應用的基礎和關(guān)鍵。但是計算機視覺(jué)在科學(xué)研究領(lǐng)域具有極強的挑戰性,自從誕生以來(lái)在工程應用領(lǐng)域得到了越來(lái)越多的重視。其中,運動(dòng)目標檢測作為計算機視覺(jué)的基礎,逐漸成為眾多科研人員的研究領(lǐng)域[3]。
運動(dòng)目標檢測是通過(guò)圖像處理,對單個(gè)或多個(gè)目標的特征包括位置、大小和形狀等信息經(jīng)過(guò)一系列的轉換后進(jìn)行計算、分析與表達,然后實(shí)現對目標狀態(tài)的識別與理解,判斷出視頻圖像中運動(dòng)目標的形狀、位置等信息,并標記相關(guān)信息,使其做出決策或者等待進(jìn)行進(jìn)一步的處理[3]。當前無(wú)論在生活應用領(lǐng)域還是科研領(lǐng)域,運動(dòng)目標檢測都得到了很好的應用:在現代農業(yè)上對農作物的檢測與長(cháng)勢進(jìn)行監控;在現代軍事領(lǐng)域上,對空中目標進(jìn)行檢測攔截;在醫學(xué)上對微生物的檢測與運動(dòng)分析;在交通運輸上對車(chē)流量進(jìn)行智能監控與流量分析等[4]。
進(jìn)入二十一世紀以來(lái),對于運動(dòng)目標檢測的研究技術(shù)越來(lái)越成熟,在現實(shí)生活中的應用場(chǎng)景也越來(lái)越廣泛。但是傳統的運動(dòng)目標檢測是依賴(lài)于個(gè)人計算機的,圖像采集部分與圖像處理部分相互分離,這就要求個(gè)人計算機需要具備十分強大的計算處理能力,同時(shí)檢測系統體積過(guò)于龐大,系統的成本和功耗也非常高,導致系統在很多領(lǐng)域無(wú)法得到很好的應用。由于半導體生產(chǎn)工藝和嵌入式芯片設計技術(shù)的快速發(fā)展,使得嵌入式 CPU 具有極低的功耗、良好性能以及超高的性?xún)r(jià)比等優(yōu)點(diǎn),使得基于嵌入式系統的運動(dòng)目標檢測在未來(lái)的發(fā)展中能夠得到更廣泛的應用。
基于嵌入式系統的運動(dòng)目標檢測系統不僅通過(guò)嵌入式開(kāi)發(fā)板對圖像進(jìn)行采集,同時(shí)需要完成對采集后的圖像進(jìn)行計算以及后臺顯示等任務(wù)。這樣在嵌入式系統中對運動(dòng)目標進(jìn)行檢測,使得整個(gè)系統成本得到極大降低,同時(shí)方便了攜帶與使用,使得應用場(chǎng)景更加廣泛。故此次研究是基于嵌入式系統,通過(guò)對運動(dòng)目標檢測算法改進(jìn)以及對攝像頭驅動(dòng)的編寫(xiě),使得在嵌入式系統中,對運動(dòng)目標的檢測能有較好的精確度,讓本文的研究能夠在相關(guān)產(chǎn)業(yè)得到應用。
圍繞著(zhù)基于 Linux 系統運動(dòng)目標檢測系統設計,本論文所做的主要工作如下:
1.搭建硬件平臺:對本文采用的硬件器件進(jìn)行方案選型;對本文使用的開(kāi)發(fā)板進(jìn)行環(huán)境搭建,主要是移植 Bootloader、裁剪內核以及制作根文件系統;介紹Linux 系統下圖像傳感器驅動(dòng)的相關(guān)架構,編寫(xiě)驅動(dòng)程序并調試,針對攝像頭驅動(dòng)中的緩存機制進(jìn)行改進(jìn);2.應用軟件的設計:Linux 下 ARM 平臺的 OpenCV 的移植;3.算法的設計與移植:對論文中所使用的 ViBe 算法進(jìn)行改進(jìn),對于 ViBe 算法存在的空洞現象和鬼影現象,本文使用形態(tài)學(xué)處理中的開(kāi)運算來(lái)解決存在的空洞問(wèn)題,通過(guò)在 ViBe 算法中融合三幀差分法來(lái)消除存在的鬼影現象,并將改進(jìn)后的 ViBe 算法在 PC 機上進(jìn)行運行;將改進(jìn)后的 ViBe 算法移植到 ARM 平臺下運行;4.功能測試:在 ARM 平臺下進(jìn)行功能測試。
本論文為基于 Linux 系統運動(dòng)檢測的系統設計,在研究前人的工作和閱讀大量的文獻基礎上,對基于 Linux 系統運動(dòng)檢測的系統設計進(jìn)行了相關(guān)研究與設計工作。本文的各章節安排如下。
第一章為引言。描述了當前運動(dòng)檢測發(fā)展現狀及相關(guān)研究背景,介紹了嵌入式系統的發(fā)展現狀與運動(dòng)目標檢測的研究現狀,闡述了論文的主要工作以及論文的主要組織架構。
第二章為運動(dòng)檢測算法研究。本章節主要介紹了當前主流的運動(dòng)目標檢測算法及其相關(guān)原理,同時(shí)分析這幾種算法的不足以及使用的相關(guān)場(chǎng)景。在這一章,重點(diǎn)介紹了三幀差分法的原理,以及 ViBe 算法的優(yōu)點(diǎn)和不足,為后面章節使用 ViBe算法做出了說(shuō)明。
第三章為系統方案的設計及平臺的搭建。本章節首先對本文使用的平臺方案進(jìn)行選擇,其次,對本文所需要的開(kāi)發(fā)環(huán)境進(jìn)行搭建,在搭建好的環(huán)境中對本文采用的圖像傳感器進(jìn)行驅動(dòng)開(kāi)發(fā),最后,改進(jìn)了驅動(dòng)緩存機制并進(jìn)行拍照測試。
第四章為 OpenCV 環(huán)境的搭建。本章節首先對 OpenCV 進(jìn)行了詳細介紹,然后完成 OpenCV 在 VS2012 上的配置,最后將 OpenCV 移植到 ARM 開(kāi)發(fā)板平臺上。
第五章為對于運動(dòng)目標檢測算法的改進(jìn)。本章節先介紹了論文所使用的主要算法 ViBe 算法,并分析了 ViBe 算法的優(yōu)缺點(diǎn)。針對本文分析的缺點(diǎn),對現有的ViBe 算法進(jìn)行優(yōu)化,并將優(yōu)化后的算法在 PC 機以及嵌入式設備下進(jìn)行使用。
第六章為總結與展望。對本文實(shí)現的基于 Linux 下運動(dòng)目標檢測系統設計的優(yōu)缺點(diǎn)進(jìn)行了分析和總結,并針對優(yōu)化和改進(jìn)提出進(jìn)一步的設想。
linux系統運動(dòng)檢測系統界面實(shí)現圖:
ubuntu 圖形界面
解壓后的交叉編譯鏈工具文件
安裝上的交叉編譯鏈工具信息

NFS 工作顯示圖
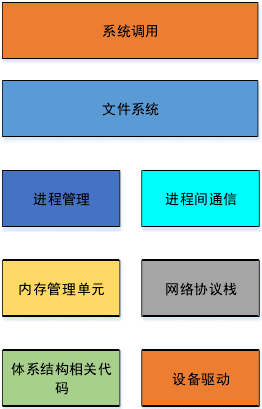
Linux 內核的組成架構
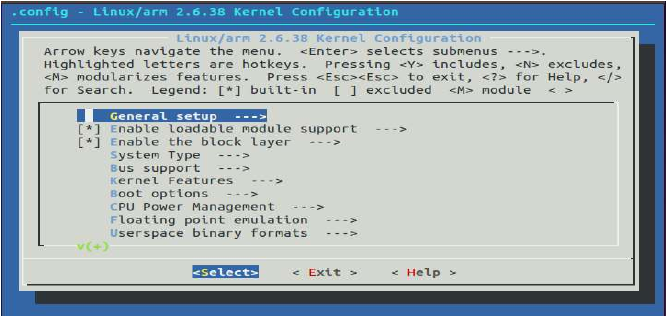
Linux 內核界面
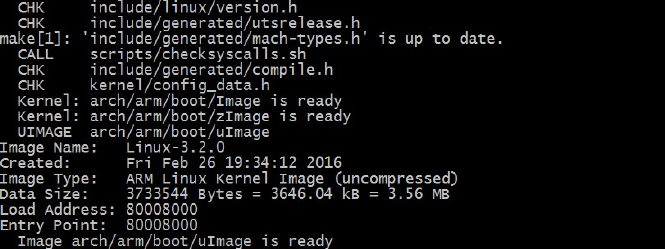
Linux 內核編譯成功界面

拍照測試圖片
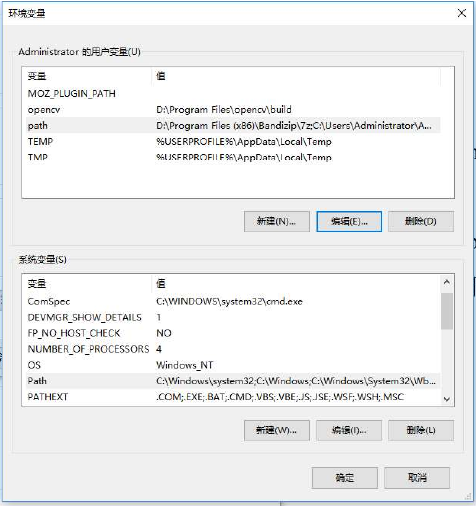
OpenCV 環(huán)境變量配置
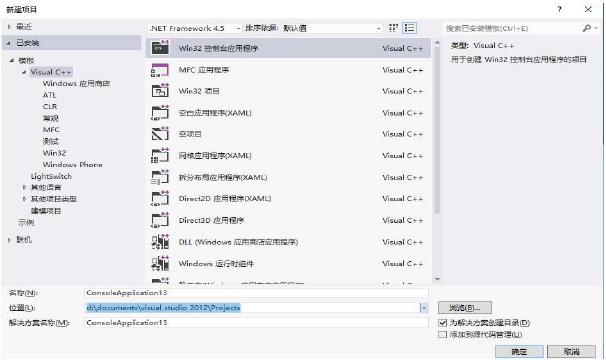
新建 Visual C++項目
新建 Visual C++項目
目錄
圖錄
第 1 章 引言
1.1 研究背景及意義
1.2 國內外研究現狀
1.2.1 嵌入式系統發(fā)展現狀
1.2.2 目標檢測的研究現狀
1.3 論文主要工作
1.4 論文組織結構
第 2 章 運動(dòng)檢測算法研究
2.1 光流法
2.1.1 光流場(chǎng)與運動(dòng)場(chǎng)
2.2 幀間差分法
2.2.1 兩幀差分法
2.2.2 三幀差分法
2.3 背景差分法
2.3.1 單高斯模型算法
2.3.2 混合高斯模型算法
2.3.3 ViBe 算法
2.4 本章小結
第 3 章 系統方案的設計及平臺的搭建
3.1 平臺方案選擇
3.1.1 嵌入式系統
3.1.2 圖像傳感器
3.2 嵌入式系統開(kāi)發(fā)環(huán)境的搭建
3.3 Bootloader
3.3.1 安裝配置 NFS、FTP
3.4 Linux 內核移植
3.4.1 Linux 內核的配置和裁剪
3.5 根文件的制作
3.6 視頻驅動(dòng)的研究與實(shí)現
3.6.1 OV9650 攝像頭的工作原理與操作時(shí)序
3.6.2 IIC 總線(xiàn)
3.6.3 V4L2 的研究與實(shí)現
3.6.4 驅動(dòng)程序的實(shí)現
3.6.5 緩存機制的改進(jìn)
3.6.6 拍照測試
3.7 本章小結
第 4 章 搭建 OpenCV 環(huán)境
4.1 OpenCV 在 VS2012 下配置
4.2 OpenCV 移植到 ARM 開(kāi)發(fā)板上
4.3 本章總結
第 5 章 基于 ViBe 算法改進(jìn)的運動(dòng)檢測算法
5.1 運動(dòng)檢測算法方案的選擇
5.2 運動(dòng)算法的改進(jìn)
5.2.1 三幀差分與 ViBe 算法的結合
5.2.2 形態(tài)學(xué)處理
5.2.3 檢測結果驗證
5.3 本章小結
第 6 章 總結與展望
6.1 論文工作總結
6.2 未來(lái)工作的展望
參考文獻
致謝
攻讀碩士學(xué)位期間從事的科研工作及取得的成果
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)