24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
四旋翼飛行器是通過(guò)對多傳感器數據的融合和解算,獲取出自身的姿態(tài)歐拉角,進(jìn)而通過(guò)PID控制器控制四個(gè)帶螺旋獎的電機,使其完成垂直起飛、息停、自由飛行等動(dòng)作。四旋翼飛行器涉及多學(xué)科的融合,包括自動(dòng)控制技術(shù)、微電子技術(shù)、多傳感器融合技術(shù)、電機學(xué)、空氣動(dòng)為學(xué)等技術(shù),具有非常高的研究?jì)r(jià)值。
而且,因為它的體積小、靈活方便等特性,現在在許多應用領(lǐng)域都開(kāi)始出現它的身影,如航拍、偵査、測繪、運輸等,應用前景十分廣闊。
本文的工作主要是針對飛行器控制和視頻傳輸的距離限制問(wèn)題,提出了一種基于嵌入式Linux, 3G網(wǎng)絡(luò )和STM32控制器的飛行器傳輸控制系統。
論文主要研究?jì)热萑缦?
1:系統總體設汁及硬件平臺。完成對系統概況的介紹和硬件平臺的選擇,采用ARM9+STM32的硬件架構,保證了系統的穩定和實(shí)時(shí)性,選擇了開(kāi)發(fā)所需的丹發(fā)板,攝像頭型號,3G傳輸的制式和模塊的型號,W及選擇嵌入式Linux作為傳輸的系統。
2:四旋翼飛行器設計。主要完成STM32下驅動(dòng)的開(kāi)發(fā),完成對MPU6050和HMC5883的讀數,基于四元數的數據融合和姿態(tài)解算,并利用經(jīng)典PK)控制器完成對飛行器的穩定控制。
3:嵌入式Linux的移植。根據開(kāi)發(fā)板的硬件平臺和實(shí)際應用,完成對嵌入式Linux內核的裁剪、配置和編譯,編譯了 Bootloader啟動(dòng)程序,制作了 yaffs2文件系統。
4:系統應用軟件的設計。完成對視頻服務(wù)器應用軟件Mjpg-streamer和Web服務(wù)器的搭建和移植,完成對STM32控制端口的驅動(dòng)開(kāi)發(fā)和應用程序,編譯移植了 3G網(wǎng)卡驅動(dòng),完成了 3G撥號上網(wǎng)腳本,完成了基于C#的上位機控制程序的編寫(xiě)。
關(guān)鍵詞:四旋翼飛行器;嵌入式Linux; 3G視頻傳輸
ABSTRACT
Quad-rotor aircraft is through the multi-sensor data fusion solves for their own state,to control the four motors with a propeller,to complete the vertical takeoff,hover,free night and otoer activities .Quad-rcrtor aircraft involved in mcrtor leaming,aerodynamics,automatic control science and other tochniques to broaden its research value and range. Moreover , because of its small size ,flexible ,easy to carry and other features,and now are beginning to appear in its pi*esence in many application areas ,such as aerial phcrtography ,reconnaissance ,mapping and otoer,very broad application prospects.
The main work of this paper is to limit the problem of aircraft control and video transmission distance for the proposed based on embedded Linux , 3G network and aircraft controllers STMS 2 transmission control system.
1: System design and hardware platforms. Compleb overview of the system and hardware platfbrm of choice introduced, using ARM9+STM32 hardware architocture,ensuring 1:he stability of the system and real-time,chose to develop the i*equii:ed model development board , camera model,3G transmi巧ion standard and modules ,as well as the transport of choice for embedded Linux system.
2: The four-rcrtor design. Mainly to complete the driving STM3 2 development, complete MPU6050 and HMC5883 readings quaternion based data integration and attitude solution and using cascade PID control of toe aircraft to complete toe stable.
3: Embedded Linux transplant. According to board's hardware platfbrm and application,complex embedded Linux kernel cutting, configuration and compilation, compiled Bootloader start the program,produced yaffs2 file system.
4: System application software design. Completion of toe video server application software to build and porting Mjpg-streamer and web servers, completo STM32 control port driver development and applications,compiled transplanted 3G network card driver, complete 3G dial-up script, complete C# based PC write control program.
Keywords: Four-rotor; Embedded Linux; 3G Video Transmission
無(wú)人飛行器(UAV)是一種利用空氣提供升力,不需要載人操作,可W自主飛行或者用無(wú)線(xiàn)遙控控制飛行,可一次使用或可回收的飛行裝置W。近幾年得益于微電子、信息技術(shù)、材料、電池等技術(shù)的發(fā)展,無(wú)人機正被廣泛的應用在軍事領(lǐng)域和民用領(lǐng)域。軍事上憑借其靈活、起降簡(jiǎn)單、造價(jià)低廉、隱蔽性好等特點(diǎn),在情報偵查、空中支援作戰、電子站任務(wù)等都逐漸開(kāi)始發(fā)揮其重要作用;民用上在通信中繼、噴灑農藥、運輸、火災搶險、攝影、測繪等領(lǐng)域作用逐漸凸顯W。
無(wú)人飛行器大致可分為固定翼和旋翼兩種。雖然固定翼發(fā)展較旋翼早很多,但旋翼飛行器因其靈活多變,可懸停、垂直起降、翻滾等特性越來(lái)越受到歡迎,尤其是多旋翼飛行器相比較直升機而言不需要多余的螺旋漿來(lái)抵消反扭力矩,更不需要開(kāi)發(fā)者研究學(xué)習復雜的空氣動(dòng)力學(xué)設計和對旋翼漿距的多重調節等專(zhuān)業(yè)知識因此近幾年來(lái)多旋翼飛行器得到了長(cháng)足的發(fā)展。雖然得益于微電子技術(shù)的進(jìn)步、傳感器工藝的提、電池續航能力的提升、動(dòng)力裝置的改善和新材料的應用,使得多旋翼飛行器無(wú)論在性能還是自主控制方面都有很大的提升但受制于無(wú)線(xiàn)距離和載重等方面的影響,多旋翼飛行器在控制距離和傳輸距離上一直沒(méi)有突破。
本文試圖通過(guò)利用當前成熟的通訊網(wǎng)絡(luò )(3G),把飛行器接入互聯(lián)網(wǎng),來(lái)突破當前尤其是民用領(lǐng)域對飛行器控制和傳輸的距離限制,實(shí)現隨時(shí)、隨地對飛行器的控制。并通過(guò)搭建嵌入式Linux平臺,把整個(gè)系統實(shí)現在一個(gè)穩定、高效的平臺系統之上,更加方便于系統的后期開(kāi)發(fā)和改進(jìn)W及集成的穩定高效。
國外對四旋翼飛行器的研究較早。20世紀初的時(shí)候,一位名叫Charles Richet的法國科學(xué)家就研制出一個(gè)微型旋翼飛行器;其學(xué)生在1906年制造了第一架載人的直升機,雖然飛行髙度只有1.5m;年,GeorgeDeBothezat與美國軍方合作研制出一架大型的四旋翼直升機,但因存在的問(wèn)題一直無(wú)法解決而放棄;1M6年,Convertawing對四旋翼飛行器機械結構進(jìn)行了改進(jìn),優(yōu)化了控制算法,四旋翼飛行器取得了成功W。此階段的飛行器都是人為控制,其穩定性和操作性都非常差,受限于技術(shù)發(fā)展等原因,此后的幾十年間,多旋翼飛行器的發(fā)展一直停滯不前。
直到二十一世紀,隨著(zhù)微電子技術(shù)、慣性技術(shù)、控制科學(xué)與理論、材料學(xué)、電機等技術(shù)的進(jìn)步和發(fā)展,多旋翼飛行器也得到了快速的發(fā)展進(jìn)步。
國外對四旋翼飛行器研究的院校和機構較多,包括斯坦福大學(xué),麻神理工大學(xué),賓夕法尼亞大學(xué)等。其中賓夕法尼亞大學(xué)GPASPS實(shí)驗室設計的四旋翼飛行器通過(guò)安裝的攝像頭慣性傳感器及紅外的判斷姿態(tài)和位置,能夠實(shí)現室內穩定的飛行、懸停、翻滾、避障等動(dòng)作。
美國知名的Draganflyer是制造定位于航拍的多旋翼飛行器額公司。其最新產(chǎn)品DranganflyerX4-P,大小為87x87x30cm,最大起飛載重可達2470g,其飛行高度可達2428m,一次充電可飛行20-25分鐘,可實(shí)現自動(dòng)起飛,自動(dòng)巡航,定點(diǎn)等功能。
亞馬遜公式是美國最大的電子商務(wù)平臺,在自動(dòng)化和智能化的倉儲、分棟和運輸等領(lǐng)域都處于行業(yè)領(lǐng)先和引領(lǐng)的地位。其在2013年就提出用無(wú)人機遞送服務(wù),其研發(fā)多的多旋翼飛行器可W每小時(shí)80公里的速度飛化并最多可攜帶2.2公斤的貨物。顧客從下單到取貨只需30分鐘。
國內研究起步較晚,但近年來(lái)也有許多大學(xué)和科研機構開(kāi)始關(guān)注并研究多旋翼飛行器,并取得不錯的進(jìn)展和成果,如哈爾濱工業(yè)大學(xué),北京航空航天大學(xué),南京航空航天大學(xué),清華大學(xué),國防科技大學(xué),山東大學(xué)等。我國北京航空航天大學(xué)的張博翰利用雙目視覺(jué)的灰度立體匹配的方法實(shí)現無(wú)人機室內走廊飛行,包括橫向位置標定,檢測障礙物等W。
國際空中機器人大賽始創(chuàng )于1991年,2012年首次在中國設立亞太賽區,與美國賽區同步進(jìn)行。按照比賽規程,空中機器人需自主完成極具挑戰性的任務(wù)。
目前為第6巧任務(wù),背景是潛伏于某情報機構的特工稱(chēng)一份擬破壞全球安全的機密計劃書(shū)藏匿于某偏遠小鎮的一個(gè)安全機構中,該特工已經(jīng)偵測到該機構有一個(gè)安全缺口,計劃用一架小型自主飛行器潛入該機構核也部位,竊取相關(guān)機密信息。
該任務(wù)于2013年亞太賽區的比賽之中被清華大學(xué)代表隊完成W,其在德國Ascending Technologies GmbH公司生產(chǎn)的Pelican四軸飛行器的基礎之上,主要利用向前的攝像頭,向下的攝像頭W及激光雷達等利用WIFI傳輸到地面,進(jìn)行數據處理。
商業(yè)上,國內的大疆(DJI)是比較成功的多旋翼研發(fā)制造公司。從無(wú)人機飛控系統到整體航拍方案、從多軸云臺到高清圖傳,DJI大疆創(chuàng )新以“飛行影像系統”為核也發(fā)展方向,其產(chǎn)品已被廣泛用于航拍、電影、農業(yè)、地產(chǎn)、新聞、消防、救援、能源、遙感測繪、致生動(dòng)物保護等領(lǐng)域,并不斷地融入新的行業(yè)應用。
3G網(wǎng)絡(luò )四旋翼飛行器軟件設計:
用電腦瀏覽器看到的視頻流

在平板電腦瀏覽器看到視頻流
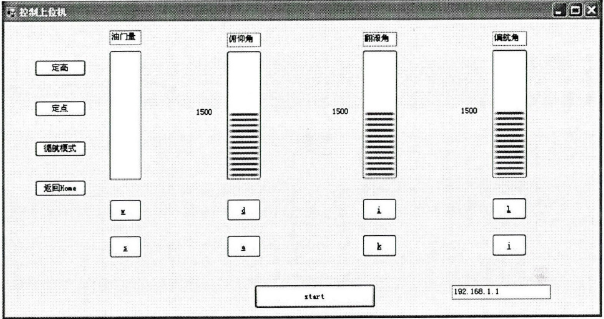
上位機界面圖

VMware虛擬機下安裝的紅帽企業(yè)版6Linux系統
Linux桌面

登陸SMB服務(wù)器后的共享文件
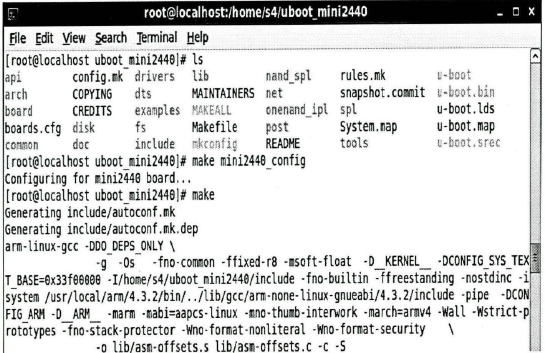
編譯u-boot
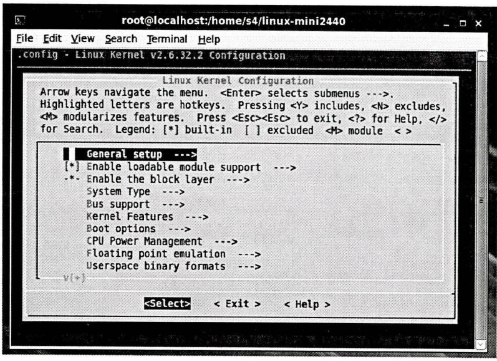
Linux內核配置菜單
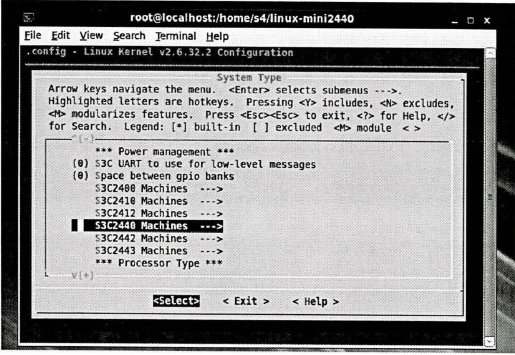
在菜單中選擇S3C2440類(lèi)型
目錄
摘要
ABSTRACT
第一章 緒論
1.1 課題背景及意義
1.2 四旋翼飛行器國外國內研究現狀
1.2.1 國外研究
1.2.2 國內研究
1.3 論文研究的內容
第二章 系統總體設計和軟件平臺
2.1 系統總體設計架構
2.2 系統硬件設計方案
2.2.1 開(kāi)發(fā)板
2.2.2 攝像頭
2.2.3 3G 網(wǎng)卡
2.2.4 飛控模塊
2.3 本章小結
第三章 四旋異飛行器設計
3.1 四旋翼飛行器飛行原理
3.2 四旋翼飛行器總體設計
3.2.1 主控芯片
3.2.2 慣性模塊
3.2.3 氣壓髙度計
3.3 數據融合和姿態(tài)解算
3.4 經(jīng)典PID控制
3.5 本章小結
第四章 嵌入式Linux系統的搭建
4.1 引言
4.2 開(kāi)發(fā)環(huán)境的建立
4.2.1 安裝 Red Hat Enterprise Linux 6
4.2.2 Windows 和 Linux 文件共享
4.2.3 NFS服務(wù)器搭建
4.2.4 安裝交叉工具鏈
4.3 U-boot移植和編譯
4.3.1 U-boot 體系結構
4.3.2 U-boot 移植過(guò)程
4.4 嵌入式Linux系統內核移植和根文件系統
4.5 本章小結
第五章 系統軟件設計
5.1 Mjpg-streamer 移植
5.1.1 Mjpg-streamer簡(jiǎn)介及系統結構
5.1.2 Mjpg-streamer 移植
5.2 3G撥號上網(wǎng)的實(shí)現
5.2.1 3G網(wǎng)卡模塊驅動(dòng)移植
5.2.2 撥號上網(wǎng)實(shí)現
5.3 上位機設計
5.4 Linux系統控制應用程序和驅動(dòng)程序的實(shí)現
5.4.1 驅動(dòng)程序
5.4.2 應用程序
5.5 本章小結
第六章 總結與展望
6.1 總結
6.2 展望
參考文獻
致謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)