24╨íòr(sh¿¬)╒ô╬─╢¿╓╞ƒß╛Ç(xi¿ñn)
24╨íòr(sh¿¬)╒ô╬─╢¿╓╞ƒß╛Ç(xi¿ñn)
íííí╒¬╥¬
ííííδS╓°(zh¿┤)╥║╛º∩@╩╛╞≈╨Φ╟≤┴┐╡─┼c╚╒╛π╘÷ú¼∩@╩╛╞≈╡─╔·«a(ch¿ún)╨º┬╩╛═∩@╡├╙╚₧Θ╓╪╥¬íú╠ß╕▀∩@╩╛╞≈╤b┼Σ╛Ç(xi¿ñn)╡─ÖC╨╡╫╘ä╙(d¿░ng)╗»│╠╢╚┐╔╥╘∩@╓°(zh¿┤)╠ß╔²∩@╩╛╞≈╡─╔·«a(ch¿ún)╨º┬╩ú¼═¼òr(sh¿¬)╥▓┐╔╥╘£p╔┘╚╦┴ª│╔▒╛╡─═╢╚δíú╥║╛º∩@╩╛╞≈╘┌╫╘ä╙(d¿░ng)╗»╤b┼Σ▀^(gu¿░)│╠╓╨╡─èA╛o╢¿╬╗╤b╓├░ΘδS╒√éÇ(g¿¿)╤b┼Σ▀^(gu¿░)│╠ú¼╩╟╫╘ä╙(d¿░ng)╗»╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╓╪╥¬╤b╓├íú
íííí▒╛╬─ßÿîª∩@╩╛╞≈╫╘ä╙(d¿░ng)╗»╤b┼Σ╛Ç(xi¿ñn)╘O╙ï┴╦╥╗╖N╗∙╙┌▀BùUÖCÿï╡─îª╓╨╢¿╬╗èA╛▀íú╩╫╧╚ú¼╘┌îªèA╛▀╩╣╙├╨Φ╟≤╖╓╬÷╡─╗∙╡A╔╧ú¼┤_╢¿┴╦èA╛▀╡─ÖCÿï╨╬╩╜ú╗▓ó▓╔╙├╝s╩°â₧(y¿¡u)╗»╘O╙ï╖╜╖¿îª▀BùUÖCÿï╡─╛▀≤w│▀╢╚▀M(j¿¼n)╨╨àóö╡â₧(y¿¡u)╗»ú¼╡½╘O╙ï▀^(gu¿░)│╠ƒo(w¿▓)╖¿╓▒╙^(gu¿ín)╡─≤w¼Fÿï╝■╘┌╘O╙ï╥¬╟≤─┐ÿ╦╬╗╓├╠Ä╡─ë║┴ª╜╟íú₧Θ┴╦╜Γ¢Q▀@╥╗åû(w¿¿n)ε}ú¼╜╙╓°(zh¿┤)▓╔╙├╚²╬╗╓├╞╜├µ▀BùUÖCÿï╬╗╓├╛C║╧╡─╖╜╖¿îªèA╛▀╡─╘¡└φÖCÿï▀M(j¿¼n)╨╨│▀╢╚╡─╘O╙ïú¼╘┌╜¿┴óÖCÿïö╡îW(xu¿ª)─ú╨═║≤ú¼═¿▀^(gu¿░)îª╬╗╥╞╝s╩°╖╜│╠╡─╟≤╜Γ╡├╡╜┴╦▀BùUÖCÿï╡─╛▀≤w│▀╢╚àóö╡ú¼═Ω│╔┴╦îª╓╨╢¿╬╗èA ╛▀╡─╘¡└φ╘O╙ïíú
íííí╞Σ┤╬ú¼ßÿîª╘O╙ï│÷╡─╘¡└φÖCÿï▀M(j¿¼n)╨╨ö╡îW(xu¿ª)╜¿─úú¼╕∙ô■ÖCÿï╡─ö╡îW(xu¿ª)─ú╨═┴╨│÷╬╗╥╞╖╜│╠ú¼▓óîª╞Σ╟≤îº╡├╡╜ÖCÿï╡─╦┘╢╚╖╜│╠║═╝╙╦┘╢╚╖╜│╠ú¼îª╔╧╩÷╡─╖╜│╠╟≤╜Γ═Ω│╔îª╓╨╢¿╬╗ÖCÿï╡─▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷ú╗╙╔└¡╕±└╩╚╒┴ªîW(xu¿ª)╖╜│╠Å──▄┴┐╜╟╢╚½@╡├ÖCÿïä╙(d¿░ng)┴ªîW(xu¿ª)─ú╨═ú¼▓ó╕∙ô■▀_└╩╪Éáû╘¡└φú¼▀\╙├∞o┴ªîW(xu¿ª)╖╓╬÷╡─╖╜╖¿ú¼îª─ú╨═▀M(j¿¼n)╨╨ÖCÿï╡─ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷ú╗îªÖCÿï╡─▀\ä╙(d¿░ng)îW(xu¿ª)║═ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷═Ω│╔║≤ú¼═¿▀^(gu¿░)╠ôöMÿ╙ÖC╖┬╒µ╘ç≥₧îª╘O╙ïÖCÿï▀M(j¿¼n)╨╨≥₧ ╫Cú¼▀M(j¿¼n)╥╗▓╜╫Cîì(sh¿¬)┴╦╦∙╘O╙ïÖCÿï╡─║╧└φ╨╘íú
íííí╫ε║≤ú¼îª∩@╩╛╞≈èA╛▀╡─╒√ÖC▀M(j¿¼n)╨╨╜Yÿï╘O╙ïú¼▓ó▓╔╙├╗∙╙┌╙╨╧▐╘¬╖╓╬÷╡──┐ÿ╦≥îä╙(d¿░ng)â₧(y¿¡u)╗»╘O╙ï╖╜╖¿îªΩP(gu¿ín)µI┴π▓┐╝■▀M(j¿¼n)╨╨â₧(y¿¡u)╗»╖╓╬÷íú═¿▀^(gu¿░)▒╚▌^ΩP(gu¿ín)µI▓┐╝■╘┌▓╗═¼╜YÿïεÉ(l¿¿i)╨═╡─╩▄┴ª╫â╨╬╟Θ¢rú¼╡├╡╜¥M(m¿ún)╫π╩▄┴ª╫â╨╬ùl╝■╧┬╡─╫εâ₧(y¿¡u)╜Y╣√ú¼═Ω│╔îªΩP(gu¿ín)µI▓┐╝■╡─â₧(y¿¡u)╗»ú¼┤_╢¿╞ΣεÉ(l¿¿i)╨═║═╛▀≤w│▀┤τíú
íííí╤╨╛┐▒φ├≈╘┌╗¼ëKîª┴π▓┐╝■╡─èA╛o╢¿╬╗▀^(gu¿░)│╠╓╨╛▀╙╨╥╗╢¿╡─╨╨│╠ú¼╟╥╩▄╡╜╟·▒·íó▀BùU╡─│▀┤τ┤≤╨í║═╫ε╨íé≈ä╙(d¿░ng)╜╟╡─╙░φæú¼╟·▒·╗¼ëK╩╜╡─îª╓╨╢¿╬╗ÖCÿï┐╔îì(sh¿¬)¼Fîª┴π▓┐╝■╡─îª╓╨╢¿╬╗ú╗╘┌├≈┤_╘O╙ï╥¬╟≤║≤ú¼═¿▀^(gu¿░)ÖCÿï╬╗╓├╛C║╧╡─╖╜╖¿îªÖCÿï▀M(j¿¼n)╨╨àóö╡╘O╙ï┐╔╓▒╙^(gu¿ín)╡─┐┤│÷╗¼ëKÿï╝■╘┌╘O╙ï╥¬╟≤╡──┐ÿ╦╬╗╓├╠Ä╡─ë║┴ª╜╟íúîªÖCÿï▀M(j¿¼n)╨╨▀\ä╙(d¿░ng)╖╓╬÷ú¼▓ó═¿▀^(gu¿░)╜¿┴ó╠ôöMÿ╙ÖC╖┬╒µ╘ç≥₧┐╔≥₧╫C╦∙╘O╙ïÖCÿï┐╔îì(sh¿¬)¼F╘O╙ï╥¬╟≤íúÅ─╗∙╙┌╙╨╧▐╘¬╖╓╬÷╡─╜╟╢╚│÷░l(f¿í)ú¼▓╔╙├─┐ÿ╦≥îä╙(d¿░ng)â₧(y¿¡u)╗»╡─╖╜╖¿îªΩP(gu¿ín)µI┴π╝■╡─│▀╢╚▀M(j¿¼n)╨╨â₧(y¿¡u)╗»╖╓╬÷ú¼▓ó▒╚▌^▓╗═¼╜Yÿï╨╬╩╜┴π▓┐╝■╡─╩▄┴ª╫â╨╬╟Θ¢rú¼═¿▀^(gu¿░)â₧(y¿¡u)╗»╖╓╬÷╡├╡╜╡─╫εâ₧(y¿¡u)╜Y╣√ú¼╩╣îª╓╨╢¿╬╗ÖCÿï╘┌¥M(m¿ún)╫π╩▄┴ª╡─╟Θ¢r╧┬▀_╡╜╘O╢¿╡─╢¿╬╗╛½╢╚íú
ííííΩP(gu¿ín)µI╘~ú║îª╓╨╢¿╬╗ÖCÿïú╗ÖCÿï╛C║╧ú╗╝s╩°â₧(y¿¡u)╗»╘O╙ïú╗╟·▒·╗¼ëKÖCÿïú╗╙╨╧▐╘¬╖╓╬÷
ííííAbstract
ííííWith the increasing demand for liquid crystal displays, the productivity of monitors is particularly important. Increasing the mechanical automation of the display assembly line can significantly increase the productivity of the display, while also reducing the investment in labor costs. The clamping positioning device of the liquid crystal display in the process of automatic assembly is an important device of the automatic production line with the whole assembly process.
ííííIn this paper, a pair-to-center positioning fixture based on connecting rod body is designed for the display automation assembly line. First of all, on the basis of the analysis of the demand for the use of fixtures, the mechanism form of fixtures is determined. The specific scale of the connecting rod mechanism is optimized by the constraint optimization design method. However, the design process can not intuitively reflect the component in the design requirements of the target location of the pressure angle. In order to solve this problem, the principle mechanism of the fixture is designed by means of the comprehensive method of the three-position plane linkage mechanism.
ííííAfter the mathematical model of the mechanism is established, the concrete scale parameters of the connecting mechanism are obtained by solving the displacement constraint equation. The principle design of the middle positioning fixture is completed.
ííííSecondly, mathematical modeling is carried out for the design of the principle mechanism. The displacement equations are listed according to the mathematical model of the institution. The velocity equation and acceleration equation of the mechanism are obtained for its guidance. The kinematic analysis of the central positioning mechanism is completed by solving the above equations. The mechanism dynamics model is obtained from the energy point of view by the Lagrangi mechanics equation. According to the Principle of Darran Bell, and using static analysis method, the dynamic analysis of the model is carried out. After the kinematics and dynamics analysis of the mechanism is completed, the design mechanism is verified by the virtual prototype simulation test. The rationality of the designed institution is further confirmed.
ííííFinally, the whole machine of the display fixture is designed. The key components are optimized using the goal-driven optimization design method based on finite element analysis. By comparing the force deformation of key components in different structural types, the optimal results are obtained under the condition of force deformation. The optimization of key components is complete, determining their type and size.
ííííThe research shows that there is a certain stroke in the process of clamping the parts in the slider. and is affected by the crank, the size of the connecting rod and the minimum drive angle. The crank slider-style aligned positioning mechanism enables aligning the components. After the design requirements are clearly defined, the parameter design of the mechanism by means of the comprehensive method of the mechanism position can visually see the pressure angle of the slider member at the target position of the design requirements. The motion analysis of the mechanism can be carried out, and the design requirements can be realized by establishing the virtual prototype simulation test. From the point of view of finite element analysis, the scale of key parts is optimized by target-driven optimization method. Comparing the force deformation of components in different structural forms, the optimal results obtained through optimization analysis enable the center positioning mechanism to achieve the set positioning accuracy when the force is satisfied.
ííííKey words: Medium positioning mechanism; Mechanism synthesis; Constraint optimization design; Crank slider mechanism; Finite element analysis
íííí─┐Σ¢
íííí╡┌╥╗╒┬ ╛w╒ô
íííí1.1 ╒nε}╤╨╛┐▒│╛░
íííí╜ⁿ─Ωüφ(l¿ói)ú¼δS╓°(zh¿┤)╚╦éâ╔·╗ε╦«╞╜╡─╠ß╕▀ú¼╘╜üφ(l¿ói)╘╜╢α╡─╚╦╫╖╟≤╕ⁿ╝╙╩µ▀m╡─╫└├µ╥ò╙X(ju¿ª)╕╨╩▄íú╗╪εÖ∩@╩╛╘OéΣ╡─░l(f¿í)╒╣▀M(j¿¼n)│╠ú¼╦ⁿ╩╝╜K╫╖╟≤▀@ÿ╙╡──┐ÿ╦ú║╕ⁿ╝╙╒µîì(sh¿¬)╡─╥ò╙X(ju¿ª)≤w≥₧╕╨íú╥║╛º∩@╩╛╞≈╩╟╗∙╙┌╥║╛º╣Γδè╨ºæ¬╡─∩@╩╛╘OéΣú¼╩╟òr(sh¿¬)┤·░l(f¿í)╒╣╡─╨┬╨═«a(ch¿ún)╞╖ú¼─┐╟░ú¼╥║╛º∩@╩╛╞≈╥╤╜¢(j¿⌐ng)╓≡▓╜┤·╠µ┴╦é≈╜y▒┐╓╪╡─ CRT ∩@╩╛╞≈ú¼│╔₧Θ╓≈┴≈∩@╩╛╘OéΣ[1].
íííí╫╘╔╧╩└╝o 70 ─Ω┤·─⌐╓┴╜±ú¼╓╨ç°╥║╛º∩@╩╛╞≈«a(ch¿ún)ÿI(y¿¿)╥╤╫▀▀^(gu¿░)┴╦Ä╫╩«─Ω╡─░l(f¿í)╒╣Üv│╠ú¼╥╤│╔₧Θ╩└╜τ╔╧╫ε┤≤╡─╥║╛º∩@╩╛╞≈╔·«a(ch¿ún)╡╪íú╓╨ç°δè╫╙╨┼╧ó«a(ch¿ún)ÿI(y¿¿)┬ô(li¿ón)║╧ò■(hu¿¼ )░l(f¿í)▓╝╡─í╢2017─Ωδè╫╙╨┼╧ó«a(ch¿ún)ÿI(y¿¿)▀\╨╨ê≤╕µí╖∩@╩╛ú¼╬╥ç°╘┌╥║╛ºδè╥òíó╙ï╦πÖC╡╚δè╫╙«a(ch¿ún)╞╖╡─╓╞╘∞║═ ╧√║─╡─ö╡┴┐╛▀┤≤ú¼δè╫╙╓╞╘∞ÿI(y¿¿)╘┌ 2017 ╚½─Ω╩╒╚δ│¼▀^(gu¿░) 13 ╚f(w¿ñn)â|╘¬íú╗∙╙┌ç°â╚²ï┤≤╡─╩╨ê÷(ch¿úng)╝░╧√┘M¥ô─▄ú¼╬╥ç°╘┌╥║╛º∩@╩╛╨╨ÿI(y¿¿)╡─╡╪╬╗╚╒╥µ═╣∩@[2]. ╫╘Å─▀M(j¿¼n)╚δ 21 ╩└╝o╥╘üφ(l¿ói)ú¼╬╥ç°╡─╥║╛º∩@╩╛╞≈«a(ch¿ún)ÿI(y¿¿)░l(f¿í)╒╣▌^┐∞ú¼╥Ä─ú▓╗öαöU┤≤ú¼ç°«a(ch¿ún)╗»╦«╞╜▓╗öα╠ß╕▀ú¼δS╓°(zh¿┤)╬╥ç°ÖC╨╡╝╙╣ñ╓╞╘∞ÿI(y¿¿)╡─│╓└m░l(f¿í)╒╣ú¼╕≈╖NÖC╨╡╘OéΣ╥▓▒╗ÅV╖║╡╪╙├╙┌╥║╛º∩@╩╛╞≈╡─╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╓╨[3].¼F╘┌╥║╛º∩@╩╛╞≈╡─╔·«a(ch¿ún)╤b┼Σ╔╨ƒo(w¿▓)╚½╫╘ä╙(d¿░ng)╔·«a(ch¿ún)╛Ç(xi¿ñn)ú¼╓≈╥¬╥└┐┐╚╦╣ñ┼Σ║╧─│╨⌐╘OéΣüφ(l¿ói)═Ω│╔ú¼▀@▓╗âHÿO┤≤╡╪└╦┘M┴╦╚╦┴ª┘Y╘┤ú¼╥▓╜╡╡═┴╦«a(ch¿ún)╞╖┘|(zh¿¼)┴┐íú₧Θ┴╦╠ß╕▀╔·«a(ch¿ún)╨º┬╩ú¼╥╘¥M(m¿ún)╫π▓╗öαöU┤≤╡─╨Φ╟≤ú¼╛═▒╪φÜ╕─▀M(j¿¼n)é≈╜y╡─╥║╛º∩@╩╛╞≈╔·«a(ch¿ún)╤b┼Σ╖╜╩╜ú¼îì(sh¿¬)¼F╫╘ä╙(d¿░ng)╗»╔·«a(ch¿ún)╤b┼Σíú
ííííδm╚╗∩@╩╛╞≈╝╝╨g(sh¿┤)╥╤╜¢(j¿⌐ng)║▄│╔╩∞ú¼╡½╔·«a(ch¿ún)▀^(gu¿░)│╠Å═δs╢αÿ╙╟╥┘|(zh¿¼)┴┐╥¬╟≤▌^╕▀ú¼╙╨║▄╢αåû(w¿¿n)ε}╙╨┤²╜Γ¢Qíú∩@╩╛╞≈╡─╤b┼Σ╩╟∩@╩╛╞≈╔·«a(ch¿ún)▀^(gu¿░)│╠╓╨▒╪▓╗┐╔╔┘╡─¡h(hu¿ón)╣¥ú¼╤b┼Σ╨º┬╩ò■(hu¿¼ )╓▒╜╙ΩP(gu¿ín)╧╡╡╜╞≤ÿI(y¿¿)╡─╜¢(j¿⌐ng)¥·╨º╥µíúδS╓°(zh¿┤)∩@╩╛╞≈╣ª─▄╙·░l(f¿í)╚½├µú¼╞Σ╝╙╣ñ╝╝╨g(sh¿┤)╥▓┬²┬²▀M(j¿¼n)▓╜ú¼ ╡½╤b┼Σ╝╝╨g(sh¿┤)░l(f¿í)╒╣▌^₧Θ╛Å┬²ú¼╥╗╓▒╥╘üφ(l¿ói)╢╝╩╟▒í╚⌡¡h(hu¿ón)╣¥ú¼╣╩îª∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╫÷╕─▀M(j¿¼n)╘O╙ï╛▀╙╨îì(sh¿¬)δH╥Γ┴xíú╜ⁿ─Ωüφ(l¿ói)ú¼∩@╩╛╞≈╤b┼Σ╥▓▓╗öα╡─â₧(y¿¡u)╗»╔·«a(ch¿ún)╛Ç(xi¿ñn)╜Yÿïú¼▓┐╖╓╤b┼Σ▀^(gu¿░)│╠╩╣╙├ÖC╨╡╘OéΣ┤·╠µ╚╦╣ñîª∩@╩╛╞≈╤b┼Σú¼╞Σ╓╨∩@╩╛╞≈╢¿╬╗èA╛▀╪₧┤⌐╒√éÇ(g¿¿)╤b┼Σ▀^(gu¿░)│╠ú¼╘┌║▄┤≤│╠╢╚╔╧╙░φæ╓°(zh¿┤)╒√ùl┴≈╦«╛Ç(xi¿ñn)╡─╔·«a(ch¿ún)╨º┬╩║═╓╞╘∞│╔▒╛ú¼╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╢¿╬╗èA╛▀╡─╘O╙ïæ¬╙├îª╙┌∩@╩╛╞≈╫╘ä╙(d¿░ng)╗»╤b┼Σ╔·«a(ch¿ún)╞≡╡╜╓╪╥¬╫≈╙├íú
íííí▒╛╬─╗∙╙┌╦─┤¿ÿO╦┘╓╟─▄┐╞╝╝╙╨╧▐╣½╦╛╬»═╨╡─╥║╛º∩@╩╛╞≈╚ß╨╘╫╘ä╙(d¿░ng)╗»╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╤╨░l(f¿í)φù─┐ú¼▀M(j¿¼n)╨╨╚ß╨╘╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╣ñ╦ç╤╨╛┐ú¼ßÿF╙╨«a(ch¿ún)╞╖╡─εÉ(l¿¿i)╨═║═╠╪╒≈ú¼┴╦╜Γ▓╗═¼«a(ch¿ún)╞╖╡─╔·«a(ch¿ún)╣ñ╦çú¼╤╨╛┐╢α«a(ch¿ún)╞╖▓ó╛Ç(xi¿ñn)╔·«a(ch¿ún)╡─╚ß╨╘╣ñ╦ç╝╝╨g(sh¿┤)ú¼╗∙╙┌╚ß╨╘╔·«a(ch¿ún)╣ñ╦çú¼▀M(j¿¼n)╨╨╥║╛º∩@╩╛╞≈╚ß╨╘╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╢α╣ª─▄èA╛▀╡─╘O╙ïíú
íííí1.2 ╒nε}╤╨╛┐╥Γ┴x
ííííîª╓╨╢¿╨─èA╛▀╫≈₧ΘÖC╨╡╔·«a(ch¿ún)╝╙╣ñ▀^(gu¿░)│╠╓╨╡─▌o╓·╢¿╬╗èA╛▀ú¼îª┴π▓┐╝■╢¿╬╗╝╙╣ñ╛½╢╚╛▀╙╨╓╪╥¬╡─╥Γ┴x[4].▒╛╬─╘O╙ï┴╦╥╗╖N╟·▒·╗¼ëK╩╜╡─╫╘ä╙(d¿░ng)îª╓╨╢¿╬╗ÖCÿïú¼┐╔îª∩@╩╛╞≈╘┌╤b┼Σ▀^(gu¿░)│╠╓╨îì(sh¿¬)¼FèA╛o╢¿╬╗╣ª─▄íú
íííí₧Θ┴╦╩╣∩@╩╛╞≈╘┌╤b┼Σòr(sh¿¬)╛▀╙╨╣╠╢¿╬╗╓├ú¼┐╔╩╣╙├èA╛▀îª╞Σ╢¿╬╗íúèA╛▀░┤═¿╙├╗»│╠╢╚┐╔╖╓₧Θ═¿╙├èA╛▀┼cîú(zhu¿ín)╙├èA╛▀ú¼═¿╙├èA╛▀╙╨╥╗╢¿═¿╙├╖╢ç·ú¼╟╥âr(ji¿ñ)╕±╡═íó┐╔┐┐╨╘╕▀ú╗îú(zhu¿ín)╙├èA╛▀╩╟₧Θ╛▀≤w╡─┴π╝■╗≥«a(ch¿ún)╞╖▀M(j¿¼n)╨╨╢¿╬╗╡─ú¼▀m╙├╙┌┤≤┼·┴┐╡─╔·«a(ch¿ún)¡h(hu¿ón)╛│ú¼╞Σ╘O╙ï╓╞╘∞╓▄╞┌ΘL(ch¿óng)ú¼╘∞âr(ji¿ñ)╕▀íúßÿîª╥║╛º∩@╩╛╞≈╡─╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)ú¼╨Φ╥¬╘O╙ï╥╗╖Nîú(zhu¿ín)╙├èA╛▀îª╥║╛º∩@╩╛╞≈▀M(j¿¼n)╨╨╢¿╬╗[5].
íííí╘O╙ï∩@╩╛╞≈╚ß╨╘╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╢α╣ª─▄îú(zhu¿ín)╙├èA╛▀╛▀╙╨╥╘╧┬â₧(y¿¡u)ä▌ú║
íííí1.ÿ╦£╩╗»∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╣ñ╨≥ú¼╠ß╕▀╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╫╘ä╙(d¿░ng)╗»│╠╢╚║═╞≤ÿI(y¿¿)╡─╜¢(j¿⌐ng)¥·╨º╥µíú
íííí2.£p╡═╚╦₧Θ╥≥╦╪îª∩@╩╛╞≈╤b┼Σ╝ä┬⌐ú¼╠ß╕▀∩@╩╛╞≈╡─╔·«a(ch¿ún)╨º┬╩ú¼▀_╡╜¼F┤·╗»╔·«a(ch¿ún)╥¬╟≤íú
íííí3. ─▄£p╔┘∩@╩╛╞≈╘┌╤b┼Σ▀^(gu¿░)│╠╓╨╡─╢¿╬╗┤╬ö╡ú¼╠ß╕▀┴╦∩@╩╛╞≈╝╙╣ñòr(sh¿¬)╡─╢¿╬╗╛½╢╚ú¼┐s╢╠┴╦∩@╩╛╞≈╡─╓╞╘∞╓▄╞┌íú
íííí1.3 èA╛▀╡─░l(f¿í)╒╣Üv│╠╝░èA╛▀ä╙(d¿░ng)┴ª╘┤╡─╥²▀M(j¿¼n)
íííí╘┌ 19 ╩└╝o▄ç(ch¿Ñ)┤▓åû(w¿¿n)╩└òr(sh¿¬)╛═╥╤ĺ╙╨║å(ji¿ún)╥╫╡─┐¿▒P(p¿ón)ú¼╙├╙┌îª╣ñ╝■èA╛o╢¿╬╗ú¼╥≥┤╦╘τ╞┌╡─èA╛▀╓╗╩╟ÖC┤▓╡─╤╙╔∞╬∩║═╕╜╝■íúδS╓°(zh¿┤)▄ç(ch¿Ñ)íóπ@íó┼┘íóπèíó─Ñ╡╚╕≈εÉ(l¿¿i)╜≡î┘╟╨╧≈ÖC┤▓╡─│÷¼Fú¼«a(ch¿ún)╔·┴╦╗óπQ╓«εÉ(l¿¿i)╡─═¿╙├èA╛▀íú╘τ╞┌╡─ÖC┤▓╙╔╙┌Ä╫║╬╛½╢╚║═▀\ä╙(d¿░ng)╛½╢╚╡═íó╣ª─▄║å(ji¿ún)å╬ú¼╦∙╥╘?sh¿⌐)A╛▀îªÖC┤▓╝╙╣ñ╡─░l(f¿í)╒╣╠ß╣⌐┴╦╛▐┤≤╡─ä╙(d¿░ng)┴ª .
íííí20 ╩└╝o╓╨╚~ú¼₧Θ┴╦▀mæ¬òr(sh¿¬)┤·░l(f¿í)╒╣╥╘╝░«a(ch¿ún)╞╖┤≤┼·┴┐╔·«a(ch¿ún)╡─╨┬─ú╩╜ú¼╩╫╧╚ú¼╙╔╟░╠K┬ô(li¿ón)├╫╦■┬σ╖╢╓Z╖≥╣ñ│╠ăäô(chu¿ñng )╘∞╡─│╔╜M╝╝╨g(sh¿┤)╤╕╦┘╘┌╚½╟≥═╞ÅVæ¬╙├ú¼δS╓«ú¼│╔╜M╝╝╥▓│╔╣ª╡─▀\╙├╙┌èA╛▀╓«╓╨íú╘┌▀@╥╗òr(sh¿¬)╞┌èA╛▀╧╡╜y╓≡▓╜═Ω╔╞ú¼╨╬│╔┴╦═¿╙├èA╛▀íó│╔╜MèA╛▀íó╜M║╧èA╛▀║═îú(zhu¿ín)╙├èA╛▀╡╚╫╙╧╡╜y [6]. Å─ 1960 ─Ω╞≡ú¼╬╥ç°╜¿┴ó┴╦╠∞╜≥╜M║╧èA╛▀ÅS(ch¿úng)íó▒ú╢¿╧≥Ωû(y¿óng)ÖC╨╡ÅS(ch¿úng)║═ö╡éÇ(g¿¿)╔·«a(ch¿ún)╜M║╧èA╛▀╘¬╝■╡─╣ñÅS(ch¿úng)íú╬╥ç°╧╚║≤╥²▀M(j¿¼n)▓█╧╡║═┐╫╧╡╜M║╧èA╛▀ú¼╡½╩╟▓█╧╡╜M║╧èA╛▀╛½╢╚╡═íóäé╨╘▓εú¼┐╫╧╡╜M║╧èA╛▀δm╚╗╛½╢╚╕▀íóäé╨╘Åèú¼às╙╓▓╗─▄∞`╗ε╒{╒√íú1980 ─Ω║≤ú¼₧Θ¥M(m¿ún)╫πç°â╚╨Φ╟≤ú¼╬╥ç°¬Ü┴óΘ_(k¿íi)░l(f¿í)┴╦┐╫╧╡╜M║╧èA╛▀╧╡╜yíú▀M(j¿¼n)╚δ 21 ╝o║≤ú¼╬╥ç°╜Y║╧╕≈εÉ(l¿¿i)╜M║╧èA╛▀ú¼╤╨░l(f¿í)│÷┐╔╒{╒√╟╥äé╨╘║├╡─╦{╧╡╜M║╧èA╛▀íú╡½╦ⁿ┼c╞Σ╦ⁿ╜M║╧èA╛▀╢╝╩╟╙╔▒è╢α╥Ä╕±╖NεÉ(l¿¿i)╡─╘¬╝■╜M│╔ú¼╓╗▀m║╧╜¢(j¿⌐ng)≥₧╪S╕╗╡─╝╝╨g(sh¿┤)╚╦åT╩╣╙├íú╡╜─┐╟░₧Θ╓╣ú¼║▄╢α╞≤ÿI(y¿¿)╚╘╚╗╩╟╩╣╙├é≈╜y╡─îú(zhu¿ín)╙├èA╛▀íú
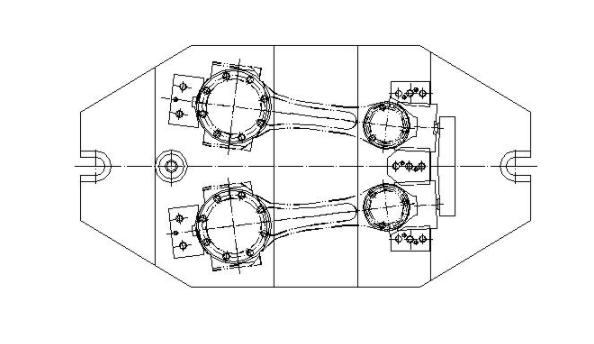
íííí╜¢(j¿⌐ng)▀^(gu¿░)╢α─Ω╡─╤╨░l(f¿í)┼c╖e└█ú¼▒▒╛⌐╦{╨┬╠╪┐╞╝╝╣╔╖▌╣½╦╛╫╘╓≈╤╨░l(f¿í)╥╗┐ε"ƒo(w¿▓)╦∙▓╗èA"╡─╚f(w¿ñn)─▄ÖC┤▓èA╛▀ú¼╚τêD 1.1 ╦∙╩╛íú╦ⁿîª╣ñ╤bèA╛▀▀M(j¿¼n)╨╨┴╦╕∩╨┬ú¼┤≤┤≤╣¥╝s┴╦îú(zhu¿ín)╙├èA╛▀╘O╙ï£╩éΣòr(sh¿¬)Θgú¼îª▓╗╥Äät╨╬áε╡─╣ñ╝■╥▓╛▀éΣ║▄║├╡─═¿╙├╨╘ú¼╟╥▀m╙├╙┌╕≈εÉ(l¿¿i)Å═δs╡─╝╙╣ñ╣ñ╦ç▀^(gu¿░)│╠ú¼ÿO┤≤╡─╠ß╕▀┴╦╣ñ╤b╨º┬╩íú
íííí1.3.1 ╥║ë║èA╛▀
íííí╫≈₧Θ┤·╠µ╩╓ä╙(d¿░ng)èA╛o╠ß╕▀╨º┬╩╡─ÜΓä╙(d¿░ng)èA╛▀ú¼╩╫╧╚╘┌┤≤┴┐╔·«a(ch¿ún)╓╨╡├╡╜æ¬╙├ú¼╡½╙╔╙┌≤w╖e┤≤íó╘δ┬ò┤≤ú¼╥║ë║èA╛▀╕ⁿ╩▄╡╜╟α▓AíúèA╛▀╡─╥║ë║╧╡╜y┼cÖC┤▓╗≥╞Σ╦√ÖC╨╡╘OéΣ╓╨╡─╥║ë║╧╡╜y╙╨╦∙▓╗═¼ú¼δm║å(ji¿ún)╥╫╡½╙╨╞Σ╣ª─▄╔╧╡─╠╪ⁿc(di¿ún)íú╡┬ç° AMF ╣½╦╛║═├└ç°VEKTEK ╣½╦╛ßÿîªèA╛▀╥║ë║╧╡╜y╘O╙ï╔·«a(ch¿ún)┴╦┼Σ╠╫╤b╓├ú¼╜Yÿï╨í╟╔íó╩╣╙├╖╜▒πíó┘|(zh¿¼)┴┐╔╧│╦ú¼╩█âr(ji¿ñ)╥▓▒╚▌^╕▀íú╘┌ÖC┤▓╣ñ╫≈▀^(gu¿░)│╠╓╨ú¼₧Θ┴╦£p╔┘ä╙(d¿░ng)┴ª╘┤╡─ôp║─ú¼VEKTEK╡─╦∙▓╔╙├╡─±ε║╧├ôδxëK╖╜╩╜ú¼ÿï╦╝╨┬╖fú¼╖√║╧îì(sh¿¬)δH╣ñ╫≈╨Φ╥¬ú¼╥▓╩╟╜ⁿ─Ω╥║ë║èA╛▀╕ⁿ╢α┤·╠µÜΓä╙(d¿░ng)èA╛▀╡─╘¡╥≥╓«╥╗íúæ¬╙├╨í╨═╙═╕╫╡─ö╡┐╪ÖC┤▓╥║ë║èA╛▀╚τêD 1.2 ╦∙╩╛íú
íííí1.3.2 δè┤┼èA╛▀
íííí▀^(gu¿░)╚Ñδè┤┼èA╛▀╥≥╞Σ╬ⁿ┴ª▌^╨í╓≈╥¬╙├╙┌─Ñ┤▓εÉ(l¿¿i)èA╛▀ú¼╥Γ┤≤└√╠⌐┤┼╣½╦╛║═╖¿ç°╬╓┐╦-▓╝╚R┬í╣½╦╛╛∙╓┬┴ª╙┌Åè┤┼δè┤┼èA╛▀╡─Θ_(k¿íi)░l(f¿í)íú╠⌐┤┼╣½╦╛╡─Åè┤┼δè┤┼èA╛▀▓╔╙├δè┐╪╙└┤┼┤┼┴ªèA╛o╧╡╜yú¼εH╛▀äô(chu¿ñng )╨┬╠╪╔½ú¼▓╗âH╘┌─Ñ┤▓╔╧ÅV╖║╡─æ¬╙├ú¼▀Ç┐╔╙├╙┌πè┤▓╡╚╕≈εÉ(l¿¿i)╟╨╧≈┴ª▌^┤≤╡─╜≡î┘╟╨╧≈ÖC┤▓╔╧íú┤╦Åè┴ª┤┼▒P(p¿ón)å╬╘¬╡─╜Yÿï╚τêD 1.3aú⌐╦∙╩╛ú¼┤┼ÿO╓╨Θg╡╫╫∙╖┼╚δ╥╗éÇ(g¿¿)┐╔─µ╙└┤┼≤wú¼╞Σ╓▄?ch¿Ñ)·╙╓╖┼╓├ĺ╛Ç(xi¿ñn)╚ª╡─δè┤┼ΦFú¼╥≥┤╦┤┼┴ªÅèä┼íú▀@ÿ╙╡─╜Yÿï╨╬│╔╡─╣ñ╫≈▒φ├µ┐╔╥╘│╔▒╢╡╪«a(ch¿ún)╔·┤┼╨╘╬ⁿ┴ªú¼Å─╢°┤_▒ú┐╔┐┐╡╪èA╛o╚╬║╬╣ñ╝■íú«ö┤┼▒P(p¿ón)å╬╘¬╠Ä╙┌═¿δè│Σ┤┼ú¿Magnetize,MAGú⌐áεæB(t¿ñi)ú¼╝┤"Θ_(k¿íi)"╬╗╓├ú¼┤┼▒P(p¿ón)îó░╤╣ñ╝■╛o╛o╬ⁿ╫í▓ó╙└▓╗╖┼Θ_(k¿íi)íú╘┌┤┼▒P(p¿ón)å╬╘¬╠Ä╙┌öαδè═╦┤┼ú¿Demagnetize,DEMAGú⌐áεæB(t¿ñi)òr(sh¿¬)ú¼╝┤"Θ]"╡─╬╗╓├ú¼┤┼┴ª╛Ç(xi¿ñn)╘┌┤┼▒P(p¿ón)â╚▓┐╨╬│╔â╚╤¡¡h(hu¿ón)ú¼¢](m¿ªi)╙╨┤┼┴ª╛Ç(xi¿ñn)ßî╖┼╡╜┤┼▒P(p¿ón)▒φ├µú¼╛═îó╣ñ╝■ßî╖┼╦╔Θ_(k¿íi)ú¼╚τêD 1.3bú⌐║═êD 1.3cú⌐╦∙╩╛íú
íííí╘┘╢╚▀B╔╧▓σ╫∙▀M(j¿¼n)╨╨═╦┤┼╛═┐╔╨╢╧┬╣ñ╝■íú┤╦Åè┴ª┤┼▒P(p¿ón)å╬╘¬┤┼┴ªÅèä┼ú¼├┐éÇ(g¿¿)┤┼ÿO╬ⁿ┴ª▀_ 35kN,îª╕▀├▄╢╚íó╕▀─▄┤┼ÿO╡─┤┼▒P(p¿ón)ú¼├┐éÇ(g¿¿)┤┼ÿO╬ⁿ┴ª╔⌡╓┴┐╔▀_ 78~85kN.
íííí1.3.3 δèä╙(d¿░ng)èA╛▀
íííí╥╘δèä╙(d¿░ng)╣ñ╤bèA╛▀╕╜╝■δèä╙(d¿░ng)╓ºô╬₧Θ└²╠µ┤·╙═ë║íóÜΓë║╓ºô╬╕╫ú¼─▄╙╨╨º╡╪Å¢╤a╙═ë║íóÜΓë║╓ºô╬╕╫╡─▓╗╫π║═╚▒╧▌ú¼╠ß╕▀╣ñ╫≈╨╘─▄║═╣ñ╫≈╨º┬╩[8].îª╫╘ä╙(d¿░ng)┐╪╓╞╧╡╜y─▄╠ß╣⌐£╩┤_╡─╣ñ╫≈╨┼╠ûú¼îª╧╡╜y╡─░▓╚½╨╘╕ⁿ╝╙╙╨└√┐╔┐┐ú¼ÿO┤≤╡╪╕─╔╞┴╦╣ñ╫≈¡h(hu¿ón)╛│íú
íííí│¼╛½├▄δèä╙(d¿░ng)╓ºô╬▓╔╙├╬ó╨═╓▒┴≈δèä╙(d¿░ng)ÖC┼c£p╦┘╞≈╜Yÿïú¼╙├▌S╩╜╜M║╧╤b┼Σú¼£p╦┘╞≈▌ö│÷▌Sε^░▓╤b╙╨╜zε^íú╣ñ╫≈òr(sh¿¬)δèä╙(d¿░ng)ÖCĺä╙(d¿░ng)£p╦┘╞≈▐Dä╙(d¿░ng)Å─╢°Äºä╙(d¿░ng)╜zε^▐Dä╙(d¿░ng)ú¼╜zε^ĺä╙(d¿░ng)┬▌─╕╤╪îº╧≥ùU╫÷╔²╜╡▀\ä╙(d¿░ng)íú┬▌─╕╔╧╢╦╤b╙╨╙|ⁿc(di¿ún)Θ_(k¿íi)ΩP(gu¿ín)ε^ú¼▓ó╙╔Åù╗╔╓ºô╬╩╣╙|ⁿc(di¿ún)Θ_(k¿íi)ΩP(gu¿ín)┼c╓ºô╬ùU╙╨ 0.1mm ╥╘╔╧Θg╧╢íú╚τêD 1.4 ₧Θ╥╗δèä╙(d¿░ng)╓ºô╬╕╫╡─═Γ╙^(gu¿ín)ú¼╓ºô╬ùU╔╧╢╦╡─╓ºô╬ε^┼c╣ñ╝■╜╙╙|òr(sh¿¬)ú¼╓ºô╬ùU═ú╓╣ú¼┬▌─╕ĺä╙(d¿░ng)╙|ⁿc(di¿ún)Θ_(k¿íi)ΩP(gu¿ín)ε^└^└m╔╧╔²ú¼╓▒╓┴╙|ε^║═╓ºô╬ùUΘgƒo(w¿▓)Θg╧╢ú¼╙|ⁿc(di¿ún)Θ_(k¿íi)ΩP(gu¿ín)ε^┼c╓ºô╬ùU╜╙╙|ú¼δè┬╖îº═¿ú¼δèä╙(d¿░ng)ÖCöαδèíú
íííí╩╣╙├δèä╙(d¿░ng)╓ºô╬╕╫╡─Ä╫┤≤â₧(y¿¡u)ⁿc(di¿ún)ú║
íííí1.╠ß╕▀┴╦╓ºô╬╡╜╓ºⁿc(di¿ún)╕▀╢╚╡─£╩┤_╨╘║═┐╔┐┐╨╘ú¼╓╪Å═╛½╢╚╕▀ú¼▀m╙├╙┌┴≈╦«╛Ç(xi¿ñn)┼·┴┐╔·«a(ch¿ún)ú¼╥▓╖√║╧¼F┤·╗»╔·«a(ch¿ún)ÿ╦£╩ú╗
íííí2.╙╔╙┌╚í╧√┴╦┼Σ╣▄╡╚╖▒¼ì╕╜╝╙▓┐╝■ú¼╥▓ƒo(w¿▓)╨ΦÅ═δs╡─╙═ë║┐╪╓╞╧╡╜yú¼║å(ji¿ún)╗»┴╦╣ñ╦ç┴≈│╠ú¼╠ß╕▀┴╦╔·«a(ch¿ún)┴ªú╗
íííí3.ƒo(w¿▓)╨Φ░▓╤b╙═╣▄íó╥║ë║╘┤íó┐╪╓╞Θy╡╚ú¼▒ú╫C┴╦δèä╙(d¿░ng)╓ºô╬╕╫─▄ë≥∞`╗ε┼▓ä╙(d¿░ng)╩╣╙├ú¼░▓╤b║═╩╣╙├╛S╫o╖╜▒πú¼╘÷╝╙┴╦╙╨╨º└√╙├├µ╖eú¼╙╨╨º╜╡╡═╝╙╣ñ│╔▒╛ú╗
íííí4.░▓╚½╨╘║├ú¼îª╣ñ╫≈¡h(hu¿ón)╛│ƒo(w¿▓)╬█╚╛ú¼╖√║╧¼F┤·╣▄└φ╥¬╟≤ú╗
íííí5.╙├δèä╙(d¿░ng)╓ºô╬╕╫┤·╠µ╙═ë║íóÜΓë║╓ºô╬╕╫ú¼═¼ÿ╙≤w╖e╡─δèä╙(d¿░ng)╓ºô╬╕╫─▄ë≥½@╡├╕ⁿ┤≤╡─╓ºô╬┴ªíú
íííí1.4 ╫╘ä╙(d¿░ng)╗»╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧îú(zhu¿ín)╙├èA╛▀╡─╤╨╛┐¼Fáε
íííí20 ╩└╝o│⌡╞┌ú¼├└ç°╩╨ê÷(ch¿úng)îª╞√▄ç(ch¿Ñ)╣ñÿI(y¿¿)ÿ╦£╩╗»«a(ch¿ún)╞╖╡─╤╕├═╨Φ╟≤╥╘╝░╕ú╠╪╣½╦╛┤≤┴┐┴≈╦«╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─│÷¼Fú¼╘┌┤≤┴┐╔·«a(ch¿ún)─ú╩╜╡─└¡ä╙(d¿░ng)╧┬«öòr(sh¿¬)╡─╞╒═¿ÖC┤▓▓╗─▄¥M(m¿ún)╫π╥¬╟≤ú¼îú(zhu¿ín)╙├èA╛▀╡─│÷¼Fú¼╜Γ¢Q┴╦▀@╥╗δyε}ú¼┤┘╩╣╞√▄ç(ch¿Ñ)╡─╔·«a(ch¿ún)╖╜╩╜╙╨┴╦╕∩├ⁿ╨╘╡─╫â╗»ú¼«a(ch¿ún)┴┐┤≤╖∙╘÷ΘL(ch¿óng)íú╘┌â╔┤╬╩└╜τ┤≤æ≡╞┌Θgú¼╬Σ╞≈╤béΣ╡─╔·«a(ch¿ún)═╞ä╙(d¿░ng)┴╦┐╞╝╝╙╓╥╗┤╬╡─▀M(j¿¼n)▓╜ú¼èA╛▀╡─╘O╙ï╔·«a(ch¿ún)╥▓δS╓«░l(f¿í)╒╣═Ω╔╞íú╙óç°╚Aáû═¿╣½╦╛╘O╙ï╓╞╘∞┴╦╩└╜τ╔╧╫ε╘τ╡─▓█╧╡╜M║╧èA╛▀╧╡╜yíú┤╦║≤ú¼╟░╠K┬ô(li¿ón)╥▓╠╪äe╓╪╥ò░l(f¿í)╒╣┤╦φù╝╝╨g(sh¿┤)ú¼Θ_(k¿íi)░l(f¿í)┴╦┤≤╨═╡─▓█╧╡╜M║╧èA╛▀╡─╔·«a(ch¿ún)║═æ¬╙├ú¼▓óîì(sh¿¬)¼F┴╦èA╛▀╫Γ┘U╜M╤b╒╛▀@╥╗äô(chu¿ñng )╨┬▓ó╨╨╓«╙╨╨º╡─╖■ä╒(w¿┤)╨╬╩╜íú
ííííδS╓°(zh¿┤)╬╥ç°ÖC╨╡╝╙╣ñ╓╞╘∞ÿI(y¿¿)╡─│╓└m░l(f¿í)╒╣ú¼ÖC╨╡╘OéΣ║═╔·«a(ch¿ún)╛Ç(xi¿ñn)╥▓╘╜üφ(l¿ói)╘╜ÅV╖║╡─▒╗æ¬╙├íú─┐╟░ú¼∩@╩╛╞≈╡─╔·«a(ch¿ún)╤b┼Σ╚╘╚╗¢](m¿ªi)╙╨═Ω╒√╡─╫╘ä╙(d¿░ng)╗»╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)ú¼╓≈╥¬╥└┐┐╚╦╣ñ═Ω│╔╤b┼Σú╗«ö╜±╔τò■(hu¿¼ )∩@╩╛╞≈╡─╨Φ╟≤┴┐╘╜üφ(l¿ói)╘╜┤≤ú¼₧Θ┴╦╝╙┐∞╔·«a(ch¿ún)ú¼╠ß╣⌐╔·«a(ch¿ún)╨º┬╩ú¼╥╘¥M(m¿ún)╫π╩╨ê÷(ch¿úng)╨Φ╥¬ú¼╛═╨Φ╥¬╕─▀M(j¿¼n)é≈╜y╡─╔·«a(ch¿ún)╤b┼Σú¼îì(sh¿¬)¼F╫╘ä╙(d¿░ng)╗»╔·«a(ch¿ún)╤b┼Σíú╞Σ╓╨∩@╩╛╞≈╢¿╬╗èA╛▀╪₧┤⌐╒√éÇ(g¿¿)╤b┼Σ▀^(gu¿░)│╠ú¼╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╢¿╬╗èA╛▀╡─╘O╙ïæ¬╙├îª╙┌∩@╩╛╞≈╫╘ä╙(d¿░ng)╗»╤b┼Σ╔·«a(ch¿ún)╞≡╡╜╓╪╥¬╫≈╙├íú
íííí╘┌╥║╛º∩@╩╛╞≈╚ß╨╘╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧ú¼╞≤ÿI(y¿¿)╢╝┴òæT╙┌▓╔╙├é≈╜y╡─îú(zhu¿ín)╙├èA╛▀ú¼├µîª╥║╛º∩@╩╛╞≈╓╞╘∞╡─╔·«a(ch¿ún)╨Φ╟≤ú¼│ú╥Ä╡─îú(zhu¿ín)╙├èA╛▀íó┐╔╒{èA╛▀║═╜M║╧èA╛▀╡╚╖╜░╕╥≥╞Σ═¿╙├╨╘▓╗╫π╡─åû(w¿¿n)ε}íú╥≥┤╦∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╨Φ╘O╙ï╖Ç╢¿═¿╙├╡─èA╛▀ú¼╠ß╕▀∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╡─╫╘ä╙(d¿░ng)╗»│╠╢╚[9].
íííí1.4.1 ╤b┼ΣèA╛▀
íííí╤b┼ΣèA╛▀╩╟èA╛▀╓╨╫ε┤≤┴┐╡─╫σεÉ(l¿¿i)╓«╥╗ú¼╥≥₧Θ╫≈₧Θ╤b┼Σîª╧≤╡─«a(ch¿ún)╞╖╨╬æB(t¿ñi)╕≈«Éú¼δSòr(sh¿¬)╢╝╘┌╫â╗»╓«╓╨ú¼╥≥┤╦╢αö╡╤b┼ΣèA╛▀╢╝╩╟îú(zhu¿ín)╙├╡─ú¼▓╗╥╫╓╞╢¿▀m╙├╡─═¿╙├ÿ╦£╩íú
íííí╤b┼ΣèA╛▀═¿│ú╖╓₧ΘÖC╨╡╤b┼Σ║═▀B╜╙▓┘╫≈â╔éÇ(g¿¿)┤≤εÉ(l¿¿i)ú¼╢°▀B╜╙▓┘╫≈│²└ΣπT═Γú¼¼F┤·┤≤╢╝▓╔╙├ƒß─▄╨╬╩╜ú¼┐╔╥╘Üw╚δ║╕╜╙╥╗εÉ(l¿¿i)íúÖC╨╡╤b┼ΣèA╛▀╥▓╓╗─▄░┤╒╒╤b┼Σ╣ñ╦ç▓┘╫≈üφ(l¿ói)╖╓ú¼╚τπT╜╙íóπ@┐╫▓ó░▓╤bΣN(xi¿ío)íó╛φ▀à╒█╟·íóë║┼Σíó╛Ç(xi¿ñn)ε^ë║║╧ú¼╥╘╝░╒┌░σ╞┴▒╬╡╚╣ñ╦ç▓┘╫≈ú¼▀@╨⌐èA╛▀┤≤╨í▓╗╥╗ú¼╥╗░πÜw╚δ╖╟ÿ╦╘OéΣ╥╗εÉ(l¿¿i)íú▒╛╬─âH╜Θ╜B╤b┼ΣδèÜΓ▓σ╫∙╡─èA╛▀ú¼╫≈₧Θîì(sh¿¬)└²ú¼╤b┼ΣδèÜΓ▓σ╫∙╡─èA╛▀╚τêD 1.5 ╦∙╩╛íú═¿│ú₧Θ┴╦╜╡╡═│╔▒╛║═╠ß╕▀╨º┬╩ú¼╥╗éÇ(g¿¿)╞≤ÿI(y¿¿)â╚╘┌╛▀≤w«a(ch¿ún)╞╖╡─ùl╝■╧┬ú¼┐╔╥╘═¿▀^(gu¿░)─úëK╗»║═┐╔╒{╗»ú¼╓╞╢¿╞≤ÿI(y¿¿)ÿ╦£╩╝╙╥╘╓╪Å═╩╣╙├íú
ííííêD 1.5 ╙╥╔╧╖╜₧Θ┤²╤b┼Σ╡─╦▄┴╧▓σ╫∙╔w░σ║═╩┬╧╚╥╤╜¢(j¿⌐ng)╤b┼Σ═Ω╡─δèÜΓ▓σ╫∙╡╫Üñíú
íííí╦▄┴╧▓σ╫∙╔w░σ╓╨╙╨╙í╦óδè┬╖░σíó╝»│╔δè┬╖ëKíóδè╫Φ║═δè╚▌╡╚δèÜΓ╘¬╝■ú¼╥¬îó╦ⁿ╤b┼Σ╘┌▓─┴╧₧Θ└Σ└¡Σôíóĺ╙╨╖¿╠m═╣╞≡▀à╡─╡╫Üñ╓╨▓ó╝╙╥╘╣╠╢¿íú╤b┼Σ▀^(gu¿░)│╠ú║╩╓╣ñîó╦▄┴╧▓σ╫∙╔w░σ╔╧╡─╝Ü╣▄┤⌐▀^(gu¿░)╡╫╫∙╔╧═╗│÷╙┌═Γ╡─îº╛Ç(xi¿ñn)ßÿú¼╖┼╘┌╡╫Üñ╔╧╡─╖¿╠m╓╨ú╗╘┘╙├â╚┐╒╡─¢_ε^ 1 ╝░╞Σ╓▄▀à╦─╠Ä═╣│÷¢_ε^ú¼îó╖¿╠m╔╧╦─╠Ä¢_ë║│÷▓┐╖╓▀à╛ë▓ó▀M(j¿¼n)╚δ╦▄┴╧▓σ╫∙╔w░σ╡─ 4 éÇ(g¿¿)░╝▓█╓╨ë║╛oú¼▀@ÿ╙╛═îó╦▄┴╧▓σ╫∙╔w░σ║═╡╫Üñ▀B╜╙│╔╥╗≤wíúêD 1.5╓╨ú¼┐╔╔∞┐s╢¿╬╗ΣN(xi¿ío) 2 ╙├╙┌╦▄┴╧▓σ╫∙╔w░σ╬╗╓├╢¿╧≥íú╙├╙┌░▓╤b▓ó╣╠╢¿δèÜΓ▓σ╫∙╡╫Üñ╡─èA╛▀┐╔ôQ╡╫╫∙╔╧╙╨╢¿╬╗ΣN(xi¿ío) 3íó4íó5íó6,ßÿîª▓╗═¼╡─δèÜΓ▓σ╫∙┐╔╕ⁿôQ▓╗═¼╡─╡╫Üñíú
íííí1.4.2 èA╛▀╘┌═╨▒P(p¿ón)╔╧╡─┐∞╦┘░▓╤b
íííí─┐╟░ÖC╨╡«a(ch¿ún)╞╖╥╘╢α╞╖╖Níó╨í┼·┴┐íó£╩òr(sh¿¬)╓╞║═╗∞┴≈╡─╔·«a(ch¿ún)─ú╩╜₧Θ╓≈ú¼èA╛▀╡─╕ⁿôQ╖╟│úεl╖▒íúßÿîª▀@╖N╔·«a(ch¿ún)╟Θ¢rú¼╚≡╩┐ EROWA ╣½╦╛═╞│÷┴╦ MTS ╧╡╜yú¼╜¿┴ó┴╦ÖC┤▓┼c╣ñ╝■╓«Θg╡─ÿ╦£╩╗»╜╙┐┌íú╚≡╩┐ EROWA ╣½╦╛èA╛▀░▓╤b╢¿╬╗╧╡╜y╚τêD 1.6 ╦∙╩╛ú¼Äº╙╨ÿ╦£╩╜╙┐┌╡─┐¿▒P(p¿ón)┼cÖC┤▓╣ñ╫≈┼_╗≥═╨▒P(p¿ón)╧α▀B╜╙ú¼┐╔╣╠╢¿╘┌╣ñ╫≈┼_├µ╔╧ú¼╜¢(j¿⌐ng)╨ú╒²║≤┐╔╜¿┴ó╜╙┐┌╡─╫°ÿ╦╘¡ⁿc(di¿ún)íú═╨░σ╩╟▀B╜╙╣ñ╝■┼c╜╙┐┌┐¿▒P(p¿ón)╡─╓╨Θg├╜≤wú¼═╨░σ╔╧╕∙ô■▓╗═¼╟Θ¢r╘┘░▓╤bèA╛▀╗≥╓▒╜╙░▓╤b╣ñ╝■íú▀@╖N╧╡╜y┐╔┤≤┤≤┐s╢╠èA╛▀╕ⁿôQ░▓╤bòr(sh¿¬)Θgú¼▓ó▒ú╫C┴╦èA╛▀╘┌ÖC┤▓╔╧╡─░▓╤b╛½╢╚íú╞Σ╘¡└φ║═─ú╛▀╡─┐∞╦┘╕ⁿôQ╩«╖╓╧α╦╞ú¼╞Σ╓╨╡─ΩP(gu¿ín)µI╝╝╨g(sh¿┤)╩╟▀@╥╗╧╡╜y╡─╓╪Å═╢¿╬╗╛½╢╚▀_╡╜┴╦ 2~5 ╬ó├╫íú
íííí1.5 ╓≈╥¬╤╨╛┐?j¿¼)╚╚?/strong>
íííí1.5.1 ╒ô╬─╓≈╥¬╤╨╛┐?j¿¼)╚╚?/strong>
íííí▒╛╬─╩╫╧╚╩╒╝»┴╦ç°â╚═Γîªîú(zhu¿ín)╙├èA╛▀╡─╤╨╛┐┘Y┴╧ú¼╘┌╝╚╙╨╖╜╖¿║═╤╨╛┐╜Y╒ô╡─╗∙╡A╔╧ú¼╜Y║╧╥║╛º∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╡─îì(sh¿¬)δH╟Θ¢rú¼îª╥║╛º∩@╩╛╞≈╘┌╤b┼Σ▀^(gu¿░)│╠╓╨▀M(j¿¼n)╨╨╢¿╬╗╡─îú(zhu¿ín)╙├èA╛▀▀M(j¿¼n)╨╨╘O╙ï║═╤╨╛┐íú╛▀≤w╡─╤╨╛┐?j¿¼)╚╚▌┐╔╥╘┐é╜Y₧Θ╥╘╧┬Ä╫ⁿc(di¿ún)ú║
íííí1íóîª∩@╩╛╞≈╢¿╨─èA╛▀▀M(j¿¼n)╨╨╨Φ╟≤╖╓╬÷ú¼╠ß│÷║╧└φ╡─îª╓╨╢¿╬╗ÖCÿï╨╬╩╜ú¼▓ó╗∙╙┌╝s╩°â₧(y¿¡u)╗»╖╜╖¿îª╢¿╬╗ÖCÿï▀M(j¿¼n)╨╨│▀╢╚â₧(y¿¡u)╗»ú╗
íííí2íó╕∙ô■èA╛▀╡─╘O╙ï╥¬╟≤╝░∩@╩╛╞≈╛▀≤w╢¿╬╗│▀┤τîª╢¿╬╗ÖCÿï▀M(j¿¼n)╨╨╚²╬╗╓├╫°ÿ╦╡─ÖCÿï╛C║╧ú¼┤_╢¿ÖCÿï╡─│▀┤τàóö╡ú╗
íííí3íó╗∙╙┌ÖCÿï╛C║╧═Ω│╔╡─╘¡└φÖCÿïú¼îª╞Σ▀M(j¿¼n)╨╨▀\ä╙(d¿░ng)îW(xu¿ª)║═ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷ú¼▓ó▀\╙├Adams îªÖCÿï▀M(j¿¼n)╨╨╠ôöMÿ╙ÖC╖┬╒µ╘ç≥₧ú¼îó╦∙╡├╬╗╥╞íó╦┘╢╚║═╝╙╦┘╢╚╟·╛Ç(xi¿ñn)▀M(j¿¼n)╨╨╖╓╬÷ú¼╫ε╜K≥₧╫C▀\ä╙(d¿░ng)îW(xu¿ª)║═ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷╡─╒²┤_╨╘[10-12];
íííí4íó═¿▀^(gu¿░) SolidWorks îª╒√≤wèA╛▀▀M(j¿¼n)╨╨╚²╛S╜¿─úú¼▓ó╗∙╙┌ ANSYS Workbench▀M(j¿¼n)╨╨─┐ÿ╦≥îä╙(d¿░ng)â₧(y¿¡u)╗»ú¼╥╘┤╦îì(sh¿¬)¼FîªΩP(gu¿ín)µI┴π▓┐╝■╡─╜Yÿïâ₧(y¿¡u)╗»íú
íííí1.5.2 ╝╝╨g(sh¿┤)┬╖╛Ç(xi¿ñn)
ííííßÿîª╥║╛º∩@╩╛╞≈╡─╫╘╢¿╨─èA╛▀╤╨╛┐?j¿¼)╚╚▌ú¼┐é╜Y╕┼└¿╞Σ╝╝╨g(sh¿┤)┬╖╛Ç(xi¿ñn)╚τêD 1.7 ╦∙╩╛íú╥║╛º∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╡─╕─╘∞φù─┐╩╟ßÿîª╘¡╙╨╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)▀M(j¿¼n)╨╨╔²╝ëâ₧(y¿¡u)╗»ú¼╩╫╧╚ú¼╚Ñ╘¡«a(ch¿ún)╛Ç(xi¿ñn)¼Fê÷(ch¿úng)▀M(j¿¼n)╨╨╒{╤╨ú¼╥╘╠ß╕▀╔·«a(ch¿ún)╛Ç(xi¿ñn)╫╘ä╙(d¿░ng)╗»│╠╢╚₧Θ─┐╡─îª╔·«a(ch¿ún)╛Ç(xi¿ñn)▀M(j¿¼n)╨╨╣ñ╦ç╖╓╬÷ú¼┤_╢¿╥║╛º∩@╩╛╞≈╘┌╤b┼Σ▀^(gu¿░)│╠╓╨╡─èA╛o╢¿╬╗╨Φ╟≤ú╗╞Σ┤╬ú¼îª∩@╩╛╞≈╢¿╬╗èA╛▀╡─╨Φ╟≤▀M(j¿¼n)╨╨╖╓╬÷╤╨╛┐ú¼▀M(j¿¼n)╨╨╖╜░╕╥Ää¥ú╗╫ε║≤ú¼îª╥Ää¥╡─╖╜░╕▀M(j¿¼n)╨╨â₧(y¿¡u)╗»╘O╙ï╖╓╬÷ú¼▓ó┐é╜Y╒╣═√íú
íííí1.5.3 ╒ô╬─╜M┐ù╜Yÿï
íííí╡┌╥╗╒┬ú¼╛w╒ôíú╜Θ╜B╒ô╬─▀xε}╡─▒│╛░┼cüφ(l¿ói)╘┤ú¼╖╓╬÷∩@╩╛╞≈èA╛▀╡─╤╨╛┐¼Fáεú¼▓óîª╒ô╬─╡─╤╨╛┐?j¿¼)╚╚▌▀M(j¿¼n)╨╨╒f(shu¿¡)├≈íú
íííí╡┌╢■╒┬ú¼îª╓╨╢¿╬╗èA╛▀╡─╖╜░╕╘O╙ï╝░│▀╢╚â₧(y¿¡u)╗»ú¼îª∩@╩╛╞≈╢¿╬╗èA╛▀▀M(j¿¼n)╨╨╖╜░╕╖╓╬÷ú¼╠ß│÷îª╓╨╢¿╬╗ÖCÿï╫≈₧Θ╢¿╬╗╡─╘¡└φÖCÿïú¼▓ó═¿▀^(gu¿░)╝s╩°â₧(y¿¡u)╗»╖╜╖¿îª╢¿╬╗ÖCÿï▀M(j¿¼n)╨╨│▀╢╚â₧(y¿¡u)╗»[13,14]. ╡┌╚²╒┬ú¼╜Θ╜BÖCÿï╛C║╧╧αΩP(gu¿ín)╡─└φ╒ôú¼▓óîªÖCÿï▀M(j¿¼n)╨╨╚²╬╗╓├╫°ÿ╦╡─ÖCÿï╛C║╧ú¼┤_╢¿ÖCÿï╡─│▀┤τàóö╡íú
íííí╡┌╦─╒┬ú¼îóÖCÿï╛C║╧╘O╙ï│÷╡─ÖCÿï▀M(j¿¼n)╨╨▀\ä╙(d¿░ng)îW(xu¿ª)║═ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷ú¼▓ó╗∙╙┌ AdamsîªÖCÿï▀M(j¿¼n)╨╨╠ôöMÿ╙ÖC╖┬╒µ╘ç≥₧íú
íííí╡┌╬σ╒┬ú¼îª╒√≤wèA╛▀▀M(j¿¼n)╨╨╚²╛S╜¿─úú¼▓ó╗∙╙┌ ANSYS Workbench ▀M(j¿¼n)╨╨─┐ÿ╦≥îä╙(d¿░ng)â₧(y¿¡u)╗»ú¼╥╘┤╦îì(sh¿¬)¼FîªΩP(gu¿ín)µI┴π▓┐╝■╡─╜Yÿïâ₧(y¿¡u)╗»íú
íííí╡┌┴∙╒┬ú¼ ┐é╜Y╒ô╬─╡─╓≈╥¬╣ñ╫≈â╚╚▌ú¼îª┤µ╘┌╡─▓╗╫π╓«╠Äú¼├≈┤_╕─▀M(j¿¼n)╖╜╧≥íú
íííí╡┌╢■╒┬ îª╓╨╢¿╬╗èA╛▀╡─╖╜░╕╘O╙ï╝░│▀╢╚â₧(y¿¡u)╗»
íííí2.1 îª╓╨╢¿╬╗èA╛▀╡─╨Φ╟≤╖╓╬÷
íííí2.2 ∩@╩╛╞≈╢¿╬╗èA╛▀╡─╘O╙ï╥¬╟≤
íííí2.3 ╤b┼Σ╔·«a(ch¿ún)╡─╦─╖N╥║╛º∩@╩╛╞≈
íííí2.4 ╘¡└φÖCÿï╡─╨═╛C║╧
íííí2.5 îª╓╨╢¿╬╗èA╛▀╘¡└φÖCÿï╡─│▀╢╚â₧(y¿¡u)╗»╘O╙ï
íííí2.5.1 ┤_╢¿╘O╙ï╫â┴┐
íííí2.5.2 ┤_╢¿─┐ÿ╦║»ö╡
íííí2.5.3 ╝s╩°ùl╝■
íííí2.5.4 ╝s╩°â₧(y¿¡u)╗»╖╜╖¿
íííí2.5.5 æ¬╙├ MATLAB â₧(y¿¡u)╗»╣ñ╛▀╧Σ╟≤╜Γ╖╓╬÷
íííí2.5.6 ╝s╩°â₧(y¿¡u)╗»╜Y╣√╖╓╬÷
íííí2.6 ▒╛╒┬╨í╜Y
íííí╡┌╚²╒┬ îª╓╨╢¿╬╗èA╛▀╡─ÖCÿï╛C║╧
íííí3.1 ╞╜├µ▀BùUÖCÿï╛C║╧╡─└φ╒ô╗∙╡A
íííí3.1.1 êAⁿc(di¿ún)┼cêA╨─ⁿc(di¿ún)
íííí3.1.2 äé≤w▀\ä╙(d¿░ng)╡─ö╡îW(xu¿ª)╜¿─ú┼c▒φ▀_
íííí3.2 ╞╜├µ▀BùUÖCÿï╛C║╧╡─╕┼─ε┼c╖╓εÉ(l¿¿i)
íííí3.2.1 ╬╗╓├╛C║╧
íííí3.2.2 ║»ö╡╛C║╧
íííí3.2.3 ▄ë█E╛C║╧
íííí3.3 îª╓╨╢¿╬╗èA╛▀╘¡└φÖCÿï╡─╚²╬╗╓├╫°ÿ╦╡─ÖCÿï╛C║╧
íííí3.3.1 ╜¿┴óö╡îW(xu¿ª)─ú╨═
íííí3.3.2 ▀BùU╬╗╓├╫â╗»╡─╬╗╥╞╛╪Ωç
íííí3.3.3 ╞╜├µ▀BùUÖCÿï╬╗╓├╛C║╧╡─╬╗╥╞╝s╩°╖╜│╠╜¿┴ó
íííí3.3.4 ╝s╩°╖╜│╠╡─╟≤╜Γ║═ÖCÿï╡─╛▀≤wàóö╡╡─┤_╢¿
íííí3.4 ▒╛╒┬╨í╜Y
íííí╡┌╦─╒┬ îª╓╨╢¿╬╗èA╛▀╡─ÖCÿï╖╓╬÷╝░╖┬╒µ
íííí4.1 îª╓╨╢¿╬╗ÖCÿï▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷
íííí4.1.1 îª╓╨╢¿╬╗ÖCÿï╡─Ä╫║╬─ú╨═
íííí4.1.2 ╒²▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷
íííí4.1.3 ─µ▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷
íííí4.2 îª╓╨╢¿╬╗ÖCÿïä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷
íííí4.2.1 ┘|(zh¿¼)ⁿc(di¿ún)╧╡╡─▀_└╩╪Éáû╘¡└φ
íííí4.2.2 └¡╕±└╩╚╒ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷╗∙╡A
íííí4.2.3 îª╓╨╢¿╬╗ÖCÿï╓╨╕≈ÿï╝■╡─┘|(zh¿¼)╨─▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷
íííí4.2.4 ╢¿╬╗ÖCÿï╘┌▀\ä╙(d¿░ng)▀^(gu¿░)│╠╓╨╕≈ÿï╝■╡─ä╙(d¿░ng)┴ªîW(xu¿ª)╖╓╬÷
íííí4.3 ▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷╡─╠ôöMÿ╙ÖC╖┬╒µ
íííí4.3.1 ╠ôöMÿ╙ÖC╝╝╨g(sh¿┤)
íííí4.3.2 ╜¿┴ó╠ôöMÿ╙ÖC─ú╨═
íííí4.3.3 ╒²▀\ä╙(d¿░ng)îW(xu¿ª)╖┬╒µ╜Y╣√╖╓╬÷
íííí4.3.4 ─µ▀\ä╙(d¿░ng)îW(xu¿ª)╖┬╒µ╜Y╣√╖╓╬÷
íííí4.4 ▒╛╒┬╨í╜Y55íó
íííí╡┌╬σ╒┬ îª╓╨╢¿╬╗èA╛▀╡─╜Yÿï╘O╙ï╝░â₧(y¿¡u)╗»
íííí5.1 îª╓╨╢¿╬╗èA╛▀╡─╚²╛S─ú╨═╜Yÿï╘O╙ï
íííí5.1.2 ▌o╓·╢¿╬╗═╨▒P(p¿ón)╡─╘O╙ï
íííí5.1.3 îª╓╨╢¿╬╗ÖCÿï╡─╘O╙ï
íííí5.1.4 ĺ╙╨┐╔╔²╜╡╤b╓├╡─ÖC╝▄╘O╙ï
íííí5.1.5 ∩@╩╛╞≈îÆ╢╚╖╜╧≥╡─╢¿╬╗╜Yÿï╘O╙ï
íííí5.2 ╗∙╙┌╙╨╧▐╘¬╖╓╬÷╡─â₧(y¿¡u)╗»╘O╙ï
íííí5.2.1 ╙╨╧▐╘¬─ú╨═╜¿┴ó
íííí5.2.2 æ¬┴ªæ¬╫â╖╓╬÷
íííí5.2.3 ░▓╤b░σ╝■╡─â₧(y¿¡u)╗»╘O╙ï
íííí5.3 ▒╛╒┬╨í╜Y
íííí╡┌┴∙╒┬ ╜Y╒ô┼c╒╣═√
íííí6.1 ╜Y╒ô
íííí▒╛╬─╜Y║╧╥║╛º∩@╩╛╞≈╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╔╧╡─îì(sh¿¬)δH╟Θ¢rú¼îª╥║╛º∩@╩╛╞≈╘┌╤b┼Σ▀^(gu¿░)│╠╓╨▀M(j¿¼n)╨╨╢¿╬╗╡─îú(zhu¿ín)╙├èA╛▀▀M(j¿¼n)╨╨╘O╙ï║═╤╨╛┐íú═¿▀^(gu¿░)╣ñ╦ç╡─╖╓╬÷║═╤╨╛┐╡─╔ε╚δú¼╜Y║╧∩@╩╛╞≈îú(zhu¿ín)╙├èA╛▀╡─╨Φ╟≤║═╣ª─▄ú¼îó╥║╛º∩@╩╛╞≈îú(zhu¿ín)╙├èA╛▀æ¬╘O╙ï₧Θîª╓╨╢¿╬╗╡─╚ß╨╘?sh¿⌐)A╛▀íú ╘┌∩@╩╛╞≈îú(zhu¿ín)╙├èA╛▀╡─╘O╙ï▀^(gu¿░)│╠╓╨ú¼▒╛╬─╫÷┴╦╚τ╧┬╡─╤╨╛┐╣ñ╫≈ú║
ííííú¿1ú⌐┤_╢¿┴╦╥╗╖Nîª╖Q(ch¿Ñng)╡─▀BùUÖCÿïú¼╕∙ô■╥║╛º∩@╩╛╞≈èA╛▀╡─╘O╙ï╥¬╟≤îªÖCÿï▀M(j¿¼n)╨╨ÖCÿï╛C║╧ú¼Å─╢°îì(sh¿¬)¼FÖCÿï╡─â₧(y¿¡u)▀xú¼┤_╢¿ÖCÿï╡─│▀┤τàóö╡íú
ííííú¿2ú⌐╗∙╙┌ÖCÿï╛C║╧═Ω│╔╡─╘¡└φÖCÿïú¼îª╞Σ▀M(j¿¼n)╨╨▀\ä╙(d¿░ng)îW(xu¿ª)╖╓╬÷ú¼▓ó▀\╙├ AdamsîªÖCÿï▀M(j¿¼n)╨╨╠ôöMÿ╙ÖC╖┬╒µ╖╓╬÷ú¼îó╦∙╡├╬╗╥╞íó╦┘╢╚║═╝╙╦┘╢╚╟·╛Ç(xi¿ñn)▀M(j¿¼n)╨╨╖╓╬÷ú¼╫ε╜K≥₧╫CÖCÿï╘O╙ï║═îì(sh¿¬)¼F╣ª─▄╡─╒²┤_╨╘íú
ííííú¿3ú⌐═¿▀^(gu¿░) SolidWorks îª╒√≤wèA╛▀▀M(j¿¼n)╨╨╚²╛S╜¿─úú¼▓ó╗∙╙┌ ANSYS Workbench▀M(j¿¼n)╨╨─┐ÿ╦≥îä╙(d¿░ng)â₧(y¿¡u)╗»ú¼îì(sh¿¬)¼F┴╦îªΩP(gu¿ín)µI┴π▓┐╝■╡─╜Yÿïâ₧(y¿¡u)╗»íú
íííí6.2 ╒╣═√
íííí▒╛╬─╘O╙ï═Ω│╔┴╦╥╗╖N╥║╛º∩@╩╛╞≈îª╓╨╬╗èA╛▀ú¼₧Θ╥║╛º∩@╩╛╞≈╘┌╤b┼Σ╔·«a(ch¿ún)╛Ç(xi¿ñn)╠ß╣⌐┴╦èA╛o╢¿╬╗╖╜╩╜ú¼╘┌╤╨╛┐╘O╙ï▀^(gu¿░)│╠╓╨┤µ╘┌╡─åû(w¿¿n)ε}╫÷╥╘╧┬╠╜╙æú║
ííííú¿1ú⌐╘┌îªÖCÿï▀M(j¿¼n)╨╨╚²╬╗╓├╫°ÿ╦╡─äé≤wîº╥²ÖCÿï╛C║╧òr(sh¿¬)ú¼▓ó¢](m¿ªi)╙╨┐╝æ]╡╜╘┌ÖCÿï▀\ä╙(d¿░ng)▀^(gu¿░)│╠╓╨╟·▒·▐D╜╟┼c╗¼ëK╨╨│╠╓«Θg╡─ΩP(gu¿ín)╧╡ú¼╘┌║≤└m╡─╤╨╛┐╓╨┐╔æ¬╙├║»ö╡ÖCÿï╛C║╧╡─╖╜╖¿îª╗¼ëK╨╨│╠┼c╟·▒·▐D╜╟╡─ΩP(gu¿ín)╧╡▀M(j¿¼n)╨╨ÖCÿï╛C║╧╤╨╛┐íú
ííííú¿2ú⌐îª╓╨╢¿╬╗ÖCÿï╡─≥îä╙(d¿░ng)╖╜╩╜ú¼┐╔╘┌║≤└m╡─╤╨╛┐╓╨▒╚▌^▓╗═¼≥îä╙(d¿░ng)╖╜╩╜ú¿╚τÜΓ╕╫≥îä╙(d¿░ng)║═δèÖC≥îä╙(d¿░ng)ú⌐╡─â₧(y¿¡u)┴╙íú
íííí╓┬╓x
íííí░╫±x▀^(gu¿░)╧╢íó╔╘┐v╝┤╩┼ú¼╘┌╚f(w¿ñn)╬∩Å═╠K╓«δHú¼╙╓╩╟╥╗éÇ(g¿¿)┤║╠∞╚τ╝s╢°╓┴ú¼╬╥╘┌└Ñ╣ñ╚²─Ω╡─╟≤îW(xu¿ª)òr(sh¿¬)╣Γ╥▓┬²┬²╜╙╜ⁿ┴╦╬▓┬òíú╘┘╥╗┤╬╗╪εÖ╘┌└Ñ╣ñ╡─îW(xu¿ª)┴ò║═╔·╗εú¼╙╨┼¼┴ª╞┤▓½╓«òr(sh¿¬)ú¼╥▓╙╨Üg┬ò╨ª╒Z(y¿│)╓«┐╠íú
íííí╘┌└Ñ╣ñ╡─▀@╚²─Ω╩╟╬╥╚╦╔·╫ε╓╪╥¬╡─╥╗╢╬òr(sh¿¬)╣Γú¼╘┌╚²─Ω╡─┐╞╤╨îW(xu¿ª)┴ò║═╔·╗ε╓«╓╨ú¼╬╥╡─îú(zhu¿ín)ÿI(y¿¿)╓¬╫R╙╨┴╦▀M(j¿¼n)╥╗▓╜╡─╠ß╔²║═│┴╡φú¼╬╥╥▓Å─π┬╢«╡─îW(xu¿ª)╔·─úÿ╙┬²┬²│╔ΘL(ch¿óng)₧Θ╝┤îó▓╜╚δ╔τò■(hu¿¼ )╣ñ╫≈╡─│╔╩∞╟α─Ωú¼▀@╩╟└Ñ╣ñ╜o╙Φ┴╦╬╥îW(xu¿ª)┴ò╔·╗ε╡─¡h(hu¿ón)╛│ú¼╩╟╕≈╬╗╢≈ă╘┌┐╞╤╨îW(xu¿ª)┴ò╓╨₧Θ╬╥╓╕┴┴┴╦╥╗▒K├≈ƒ⌠ú¼╩╟ă╨╓╡▄║══¼îW(xu¿ª)éâδS╓°(zh¿┤)╬╥▓╗öα│╔ΘL(ch¿óng)íú
íííí┤╦òr(sh¿¬)ú¼╘┌└Ñ╣ñ╨úê@╡─╚f(w¿ñn)╟º▀^(gu¿░)═∙╢╝╙│╚δ┴╦─X║úú¼┐╞╤╨îW(xu¿ª)┴ò╡─╨┴╟┌╕√╘┼íó│Σîì(sh¿¬)╞┤▓½╡─╨úê@╔·╗ε╢╝ÜvÜv╘┌─┐ú¼îª╬╥╡─╜±║≤╡─╣ñ╫≈╔·╗ε╞≡╡╜┴╦╩«╖╓╖eÿO╡─╫≈╙├íú
íííí╬╥╘┌└Ñ╣ñ╡─îW(xu¿ª)┴ò╠╜╦≈δx▓╗Θ_(k¿íi)╕≈╬╗ƒo(w¿▓)╦╜╖ε½I╡─└╧ăéâú¼╩╫╧╚╬╥╥¬╕╨╓x╬╥╡─┤T╩┐╤╨╛┐╔·îºÄƒéπ╝t▄è└╧ăú¼╚²─Ωüφ(l¿ói)ú¼╬╥╥è(ji¿ñn)╫C┴╦îì(sh¿¬)≥₧╩╥╘┌éπ└╧ă╡─ĺεI(l¿½ng)╧┬▓╗öα╡─░l(f¿í)╒╣ë╤┤≤ú¼éπ└╧ăƒo(w¿▓)╦╜╖ε½I╡─╚╦╕±≈╚┴ª╥╗╓▒╔ε╔ε╡─╙░φæ╓°(zh¿┤)╬╥ú¼╦√£Y▓⌐╡─îW(xu¿ª)╫R║═ÿO╛▀╟░╒░╨╘╡─îú(zhu¿ín)ÿI(y¿¿)╤█╣Γ₧Θ╬╥╘┌îW(xu¿ª)╨g(sh¿┤)╔╧╡─╡└┬╖╔╧╓╕╥²╖╜╧≥ú¼òr(sh¿¬)òr(sh¿¬)┐╠┐╠╝ñäε╓°(zh¿┤)╬╥▓╗öα╡─îW(xu¿ª)┴ò▀M(j¿¼n)▓╜íú╘┌Θe╧╛╓«òr(sh¿¬)ú¼éπ└╧ăò■(hu¿¼ )┼c╬╥éâ╠╜╙æîú(zhu¿ín)ÿI(y¿¿)░l(f¿í)╒╣╟░╛░╖╜╧≥ú¼╫î╬╥┼că╨╓╡▄éâ╝░òr(sh¿¬)┴╦╜Γ╨╨ÿI(y¿¿)ä╙(d¿░ng)╧≥ú¼₧Θîóüφ(l¿ói)╡─┬ÜÿI(y¿¿)░l(f¿í)╒╣▒M╘τ╡─╫÷ΘL(ch¿óng)▀h╥Ää¥íú
íííí╞Σ┤╬╬╥╥¬╕╨╓x MCVN ÖC╞≈╚╦╤╨╛┐êFΩá╓╨╡─ΩÉ├≈╖╜╕▒╜╠╩┌íóà╟║ú▓¿╕▀╝ë╣ñ│╠ăíó═⌡îW(xu¿ª)▄è╕▒╜╠╩┌║═┘R¼|└╧ăú¼╩╟îì(sh¿¬)≥₧╩╥├┐╥╗╬╗└╧ă╡─╣▓═¼┼¼┴ªáI(y¿¬ng)╘∞┴╦┐╞╤╨îW(xu¿ª)┴ò╡─┴╝║├╖╒ç·íúΩÉ├≈╖╜└╧ă╛▀╙╨╩«╖╓╪S╕╗╡─╣ñÿI(y¿¿)┐╪╓╞╜¢(j¿⌐ng)≥₧ú¼╘┌å╬╞¼ÖCΘ_(k¿íi)░l(f¿í)╖╜├µ╥▓╙╨╩«╖╓îú(zhu¿ín)ÿI(y¿¿)╡─╔ε╚δ╤╨╛┐ú¼╘┌▀@╨⌐╖╜├µ╢╝îª╬╥▀M(j¿¼n)╨╨┴╦╖╟│ú╘ö╝Ü╡─╓╕îºú╗à╟║ú▓¿└╧ăîªîì(sh¿¬)≥₧╩╥▒M╨─▒M╪ƒ╡─╕╢│÷╫╘╝║╡─┼¼┴ªú¼╘┌φù─┐╘O╙ï╡─▀^(gu¿░)│╠╓╨╠ß│÷▀^(gu¿░)║▄╢α╓╕îº╨╘╡─╥Γ╥è(ji¿ñn)ú╗═⌡îW(xu¿ª)▄è└╧ă╙╨╪S╕╗╡─╜Yÿï╘O╙ï╜¢(j¿⌐ng)≥₧ú¼₧Θ╬╥éâ╘┌╘O╙ï║═êD╝êîÅ║╦╕╢│÷┴╦║▄╢α╛½┴ªú╗┘R¼|└╧ă╣ñ╫≈ç└╓öíó╫≈∩L(f¿Ñng)╠ñîì(sh¿¬)ú¼╢α┤╬₧Θîì(sh¿¬)≥₧╩╥Θ_(k¿íi)▐k┼α╙û╒n│╠ú¼╩╣╬╥╩▄╥µ┴╝╢αíú
íííí╘┌┐╞╤╨îW(xu¿ª)┴ò╡─╡└┬╖╔╧▓ó╖╟╥╗╖½∩L(f¿Ñng)φÿú¼╣ñ╫≈╔·╗ε╓╨╥α╩╟╚τ┤╦íú╘┌╨ú╔·╗ε╙÷╡╜╡─└ºδyδx▓╗Θ_(k¿íi)═¼îW(xu¿ª)╓«Θg╡─╗Ñ╧αÄ═╓·ú¼╘┌┤╦╬╥╕╨╓x╩╥╙╤═⌡╢¼íó▓▄╚τ½híó║Θ╥╥▀_╘┌╔·╗ε╓╨╡─║═─└╧α╠Äú¼áI(y¿¬ng)╘∞┴╦┴╝║├╡─╦▐╔ß╖╒ç·ú╗╕╨╓x║·¡é¡éíóÅêäP╧Φíó└ε╞µíó┤▐╙φ╡╚═¼îW(xu¿ª)╘┌┐╞╤╨îW(xu¿ª)┴ò╓╨╜o╙Φ╡─Ä═╓·ú╗╕╨╓xîì(sh¿¬)≥₧╩╥ΩÉ╛├┼≤íó╨∞╤≤╤≤íóΩÉ╝╤íó═⌡═⌠┴╓íó╬║φÿ╧Θíóäó┴┴íó╨ñÿ╖(l¿¿ )íóäó╝╬τ∙íó└ε╩└║└íó╢┼├╧Å⌐íó╗⌠┴╓íóÅê╦ç₧tíóΩÉ╜¡╡╚╚╦ΘL(ch¿óng)╞┌╥╘üφ(l¿ói)îª╬╥îW(xu¿ª)┴ò╣ñ╫≈╡─╓º│╓║═╣─äεíú
íííí╫ε║≤╕╨╓x╬╥╡─╕╕─╕ú¼╘┌╬╥╚⌡╨íƒo(w¿▓)╓·╓«òr(sh¿¬)₧Θ╬╥╒┌∩L(f¿Ñng)ô⌡╙Ωú¼╘┌╬╥▓╜╚δ╨úê@òr(sh¿¬)îª╬╥╥²îº╣─äεú¼╘┌╬╥╙÷╡╜└ºδy╓«òr(sh¿¬)îª╬╥ΩP(gu¿ín)╨─Ä═╓·ú¼╩╟─πéâ╜o┴╦╬╥╔·├ⁿú¼╜o┴╦╬╥£╪▄░╡─╝╥ú¼╘┌┬■┬■╚╦╔·┬╖╔╧╬╥╥╗╢¿┬á(t¿⌐ng)Å──πéâ╡─╜╠╒díú
íííí╖N╥╗┐├┤≤ÿΣ(sh¿┤)╫ε║├╡─òr(sh¿¬)Θg╩╟╩«─Ω╟░ú¼╞Σ┤╬╩╟¼F╘┌íú╚╦╔·╠Ä╠Ä╩╟╞≡ⁿc(di¿ún)ú¼╘┌╝┤îóδxΘ_(k¿íi)╨úê@▓╜╚δ╨┬╡─╣ñ╫≈ìÅ╬╗╓«δHú¼╬╥╥¬╖eÿOÿ╖(l¿¿ )╙^(gu¿ín)╡─├µîª╨┬╡─¡h(hu¿ón)╛│┼c╠⌠æ≡ú¼╘┌╬┤üφ(l¿ói)╡─╣ñ╫≈╔·╗ε╓╨└^└m╟░╨╨íú
ííííàó┐╝╬─½I
ú¿╚τ─·╨Φ╥¬▓Θ┐┤▒╛╞¬«àÿI(y¿¿)╘O╙ï╚½╬─ú¼╒ê─·┬ô(li¿ón)╧╡┐═╖■╦≈╚íú⌐