24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
隨著(zhù)我國人口的不斷增加以及社會(huì )老齡化程度日漸嚴重,就醫人數逐漸增加,導致醫院藥房的工作負荷急速增大。藥品的大量入庫與發(fā)放已經(jīng)超出了傳統藥房的承受能力,藥師的勞動(dòng)強度增大,工作效率降低。為了改善以上不足之處,許多醫院都引入了自動(dòng)化藥房系統。為了縮短取藥用時(shí),提高工作效率,以機械手式自動(dòng)化藥房為研究對象,設計一種新型的自動(dòng)化藥房取藥機械手。
以唐山市某區醫院藥房為研究背景,綜合考慮醫院日處方量和單處方取藥數量等因素,給出一種新型自動(dòng)化藥房取藥機械手總體結構設計的方案。使用繪圖軟件Solidworks 建立三維模型,敘述整個(gè)取藥機械手的結構組成和如何完成動(dòng)作。對幾種常用驅動(dòng)方式進(jìn)行比較,使用電機驅動(dòng)方式,并對各驅動(dòng)裝置進(jìn)行選型。
根據取藥機械手的機構運動(dòng)原理,運用改進(jìn)的 D-H 法建立桿系坐標,利用齊次變換矩陣得到取藥機械手末端執行器的運動(dòng)學(xué)方程。在 MATLAB 軟件中對取藥機械手進(jìn)行仿真分析,得到各取藥動(dòng)作的位姿圖和取藥范圍圖。 將取藥機械手模型進(jìn)行簡(jiǎn)化處理,把簡(jiǎn)化的模型導入 ADAMS 軟件中,添加取藥所需的約束和驅動(dòng)。根據取藥機械手的各取藥動(dòng)作進(jìn)行時(shí)間分配,在 Motion 中編寫(xiě) step 函數,得到各動(dòng)作機構的速度曲線(xiàn),給取藥機械手的控制方案設計提供理論基礎。在控制系統設計上,選擇 OMRON CPIH 系列 PLC、相應的擴展模塊和伺服單元,選定各器件的具體型號,給出了硬件控制系統結構圖和控制硬件連接圖。選擇順序控制指令來(lái)進(jìn)行編程,給出了自動(dòng)化藥房取藥機械手的軟件流程圖,進(jìn)行了 PLC梯形圖編程。對自動(dòng)化藥房取藥機械手的研究有重要意義。
關(guān)鍵詞:自動(dòng)化藥房;取藥機械手;結構設計;運動(dòng)仿真;控制系統

Abstract
With the increasing population in China and the increasingly serious aging ofsociety, the number of patients is increasing gradually, which leads to the rapid increaseof the work load of hospital pharmacy. A large number of drugs have been put intostorage and distributed beyond the capacity of traditional pharmacies. As the laborintensity of pharmacists increases, their work efficiency decreases. In order to improvethe above deficiencies, many hospitals have introduced automatic pharmacy system. Inorder to shorten the time of taking medicine and improve the efficiency of work, a newtype of automatic medicine-fetching manipulator for automatic pharmacy is designed.
Based on the daily prescription quantity and single prescription quantity of ahospital pharmacy in Tangshan city, presenting a scheme of the overall structure designof a new automatic medicine-fetching manipulator. Using Solidworks to establish athree-dimensional model, expounding the structure and action of the device. Bycomparing several common driving modes, and motor driving mode is used for selection.
According to the mechanism movement principle of the medicine-fetching manipulator, the improved d-h method is used to establish the dry coordinates, kinematicsequation of the end-effector is obtained by using the homogeneous transformation matrix.The posture and range diagram of each action were obtained in MATLAB.
The mechanical arm model of medicine-fetching was simplified and imported into ADAMS software to add the constraint and motion. According to the time distribution of medicine - fetching manipulator, step function is written in Motion to obtain the speed curve of each action mechanism and provide theoretical basis for control scheme design.
In control system design, OMRON CPIH series PLC and corresponding required extension modules are selected, and the structure diagram and control hardware connection diagram of the hardware control system are drawn. Selecting sequence control instructions to program, aobtain software flow chart, and PLC ladder programming.The
significance of it is researching automatic medicine-fetching manipulator in pharmacy.
Keywords: automated pharmacy, medicine-fetching manipulator, structure design, motion simulation, control system
目 次
引 言
隨著(zhù)我國的人口比例漸漸呈現出老齡化程度不斷加重的趨勢,相對于藥品的需求也越來(lái)越大,國內的醫療體制逐漸趨于完善,醫療水平不斷提高,能夠滿(mǎn)足民眾不斷增長(cháng)的基本用藥需求。我國是人口大國,同時(shí)醫療水平有限,當病人去醫院就診時(shí)經(jīng)常會(huì )碰到排長(cháng)隊取藥的狀況,尤其在一些醫院信息化建設不完善的醫院中更為嚴重。與此同時(shí),科學(xué)技術(shù)水平逐步提高,不同領(lǐng)域之間產(chǎn)生交集,使自動(dòng)化技術(shù)在多領(lǐng)域內得到應用。在不同的領(lǐng)域內使用程度也不相同,醫學(xué)方面的使用時(shí)間比較短,但是醫院傳統藥房被自動(dòng)化藥房取代將是其以后發(fā)展的方向。
自動(dòng)化藥房應運而生,其彌補了傳統藥房的很多不足,大大提高了藥房的工作效率,自動(dòng)化藥房能夠做到對醫院已入庫藥品的信息進(jìn)行記錄儲存,也可做到對藥品的儲存與發(fā)放[1].同時(shí)改善患者就醫取藥環(huán)境、縮短取藥時(shí)間,使患者得到更多的用藥指導服務(wù)而提高醫院的社會(huì )效益。自動(dòng)化藥房可實(shí)現自動(dòng)發(fā)藥、儲藥、上藥一體系統控制,速度快、準確率高并且易于維護。自動(dòng)化藥房可以使藥品之間的存放空隙小于目前狀態(tài),這樣就增加了同空間內的存放數量,大大節約了藥房面積,提高藥房空間的使用率。
本文擬設計一款新型取藥裝置,以取藥機械手為主體設計,其可以在 X,Y,Z三個(gè)方向運動(dòng),同時(shí)也可實(shí)現水平方向的 180°范圍內旋轉,機械手下方設計有臨時(shí)儲藥裝置,其性能優(yōu)良、結構合理,使取藥更加平穩快速,減輕藥房醫務(wù)人員勞動(dòng)強度,提高取藥效率。
第1章緒論
1.1課題背景及意義
1.1.1課題研究背景
20世紀中葉,全球的計算機技術(shù)、自動(dòng)化技術(shù)開(kāi)始進(jìn)入高速發(fā)展階段,美國憑借其先進(jìn)的科學(xué)生產(chǎn)能力優(yōu)先進(jìn)入研發(fā)工業(yè)機器人的行列,使這項技術(shù)在實(shí)際生活中得以普遍應用。最初的工業(yè)機器人只是把傳統的機構學(xué)與電子技術(shù)結合起來(lái),但如今已發(fā)展為綜合了計算機科學(xué)技術(shù)、控制理論、機構學(xué)、人工智能學(xué)、仿生學(xué)、電子工程技術(shù)、信息傳感技術(shù)等多學(xué)科高新技術(shù)[1].工業(yè)機器人只是一個(gè)總稱(chēng),在不同的工作領(lǐng)域有其專(zhuān)有名稱(chēng)。其應用領(lǐng)域不斷得到拓展,所能夠完成的工作日趨復雜,應用行業(yè)也是日漸增多,但由于行業(yè)生產(chǎn)產(chǎn)品不同,所使用的程度也不盡相同,各行業(yè)需求如圖1所示。工業(yè)機器人能完成的功能也日漸增多,不再是最簡(jiǎn)單的工作,一些難度系數比較大、加工要求較高的操作也能勝任。

全球范圍內有很多工業(yè)機器人生產(chǎn)地,其中規模比較大的大多歸入歐系和日韓系中,這兩類(lèi)體系中日本和德國分別占其主導地位,二者占據全球90%的市場(chǎng)份額。
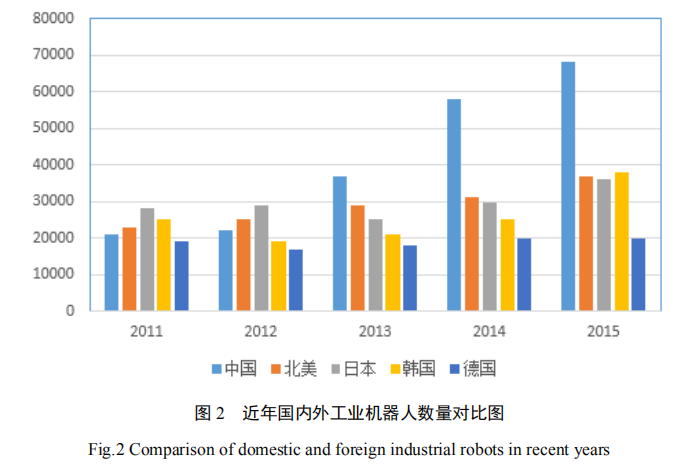
由于國內經(jīng)濟的高速發(fā)展,又伴以人工花費逐年遞增,工業(yè)機器人已經(jīng)成為各行各業(yè)迫切希望在自身得以使用的設備,如圖2所示。我國近幾年生產(chǎn)線(xiàn)上機器代替人工的情況不斷出現,并給企業(yè)帶來(lái)非常明顯的效益。工業(yè)機器人在我國內的應用還不是很成熟,國內的生產(chǎn)企業(yè)還走在由工人操作到自動(dòng)化生產(chǎn)的道路上,使得這項技術(shù)成果擁有十分巨大的利潤前景[3].國內絕大部分的機器人都是日本、歐洲及美國等地生產(chǎn)的,相比這些國家,我國這一技術(shù)上的研發(fā)腳步?jīng)]有跟上他們,性能較差,最重要是沒(méi)有自主技術(shù)產(chǎn)權,在同等產(chǎn)品中我國與這些先進(jìn)國家無(wú)法抗衡[4-5].
去年8月27日,2017世界機器人大會(huì )在京閉幕。此次大會(huì )上,有報告顯示中國制造業(yè)中機器人的使用率正在飛速加大,整年的交易額估計可達到62.8億美金,2012-2017年這幾年間的年均增速可到28%.我國機器人市場(chǎng)需求巨大,在整個(gè)機器人應用地中有著(zhù)舉足輕重的一席之地。從其中可以看出,無(wú)論是在全球還是國內,工業(yè)機器人都是所占比重最大的,相比全球整個(gè)服務(wù)機器人使用狀況,我國在這方面還有很大的發(fā)展前景。同時(shí)也反映出我國高新技術(shù)的短板現狀,特種機器人在實(shí)際中的應用比例較小。
自動(dòng)化藥房也是工業(yè)機器人在現實(shí)生活中應用的一種。自動(dòng)化藥房使以往的人工取藥與上藥模式成為了歷史,大大提高了醫院藥房的工作效率。相比別的國家,我國人口眾多,所以醫院藥房更容易出現病人集中就醫取藥的情況,就導致藥房工作時(shí)間內面臨大量發(fā)藥狀況。如何緩解與日俱增的患者看病后取藥時(shí)間長(cháng)和有效管理繁雜的藥品制劑成了當前大中醫院需要面對的一個(gè)問(wèn)題[6-8].因這些普遍存在的問(wèn)題,改變原有的藥房形式已經(jīng)成為不得不考慮的問(wèn)題。自動(dòng)化藥房目前已經(jīng)是一種工作性能和生產(chǎn)技術(shù)較為成熟的裝置,成功的在生活實(shí)際應用中體現出它的種種優(yōu)勢。
本文所研究設計的一款新型取藥機械手適用于盒裝和瓶裝藥品,運動(dòng)快速便捷,抓取平穩可靠,旨在提高自動(dòng)化藥房工作效率,滿(mǎn)足目前國內醫院迫切希望藥房中藥品快速抓取的需求。
1.1.2課題研究意義
隨著(zhù)我國經(jīng)濟的高速發(fā)展與社會(huì )醫療制度的不斷完善,醫院設施建設已不再采用原來(lái)的建設方法。相比較之前醫院的傳統設施,當代醫院建設完全以現代化建設為主,而醫院信息化建設將成為醫院現代化建設的主要目的。
自動(dòng)化藥房是醫院整體現代化建設中的重要組成部分,自動(dòng)化藥房的應用完美地彌補了傳統藥房的弊端。它相比較傳統藥房,需要的工作人員數量減少,同樣空間內的儲藥量增加。在有效利用空間的同時(shí)還提高了藥房的整體工作效率,減輕了藥房工作人員的勞動(dòng)強度,節省了更多的體力用以服務(wù)病人,為病人更好地講解藥品使用方法與功能,進(jìn)而提升病人對醫院服務(wù)的滿(mǎn)意度。
自動(dòng)化藥房在實(shí)際運用過(guò)程中存在的優(yōu)勢一般體現在以下三點(diǎn):1)用藥安全。在老式藥房中,都是通過(guò)員工取藥,在一些情況下可能會(huì )出現因人為原因導致給病人拿錯藥的事故。例如,某地區某售賣(mài)地點(diǎn)錯將外包裝相差不多的"醋酸潑尼松片"看作"格列本脲片"賣(mài)給一名顧客,歷經(jīng)苦苦尋找才將賣(mài)錯藥品換回。2)縮短買(mǎi)藥時(shí)間。既節省了顧客的買(mǎi)藥時(shí)間也縮短了店員或藥師的取藥時(shí)間,同時(shí)也能更好的為顧客或者病人講解所買(mǎi)藥品的功能與使用方法。3)確保藥品質(zhì)量。藥品長(cháng)時(shí)間放在藥店柜臺或者老式藥房中,其存在環(huán)境很難達到藥品的存放環(huán)境要求,縮短了藥品的實(shí)際保質(zhì)時(shí)間長(cháng)度。自動(dòng)化藥房系統可以有效地解決上述不良問(wèn)題,確保賣(mài)給他人的藥品是安全的。
1.2自動(dòng)化藥房在國內外的發(fā)展現狀及趨勢
1.2.1自動(dòng)化藥房在國外的發(fā)展現狀
20世紀90年代,在現代藥品管理思想的指導下[14],一些科技發(fā)展迅速、加工能力強的國家走在了該技術(shù)創(chuàng )新研發(fā)的前沿上,他們在基于本國醫院藥房的實(shí)際情況下研制了多樣與之匹配的相關(guān)設備。這些藥房設備綜合多項先進(jìn)技術(shù),使現代藥房擺脫傳統藥房的諸多缺點(diǎn),具有高度自動(dòng)化處理功能。隨著(zhù)這項技術(shù)的不斷創(chuàng )新,形形色色的這類(lèi)產(chǎn)品進(jìn)入人們的生活中。根據其完成功能的方式以及設計結構可大體上分為四種類(lèi)型。
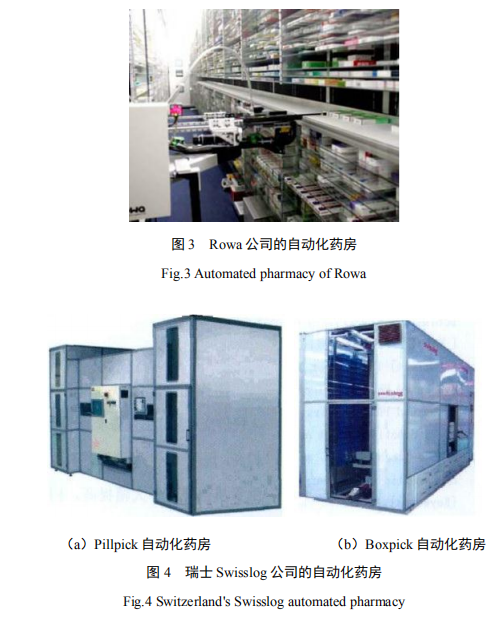
1)機械手取藥自動(dòng)化藥房這種類(lèi)型的自動(dòng)化藥房是在國外使用比較廣泛的,其取藥的設計理念是基于吸盤(pán)真空吸附與機械結構夾持協(xié)調運動(dòng)。但這種取藥機構在一次抓取行程中只能抓取一盒或者兩到三盒的同種藥,能夠滿(mǎn)足一般藥店以及日處理處方不大的醫院,面對日處方量較大的醫院則顯現出不適性。若自動(dòng)化藥房設備中只配置一個(gè)機械手,則不能同時(shí)完成藥品的出庫和入庫,針對這類(lèi)問(wèn)題的解決方案,一般是添加抓取機構的數量。Rowa這一產(chǎn)品就是以這種原理制成的,如圖3所示。除此之外類(lèi)似如Pillpick與Boxpick這兩個(gè)產(chǎn)品也是同樣如此,如圖4所示。
2)儲藥槽式自動(dòng)化藥房
面對機械手式自動(dòng)化藥房不適用大處方量醫院?jiǎn)?wèn)題,國外先進(jìn)的生產(chǎn)商又研發(fā)了儲藥槽式自動(dòng)化藥房,其中的佼佼者有兩類(lèi)產(chǎn)品,它們性能水平基本持平,如圖5所示。這種類(lèi)型的自動(dòng)化藥房已經(jīng)成為國內外藥房發(fā)放盒裝藥品的首選產(chǎn)品。其儲藥槽與水平方向有一定的角度,基于重力落料原理,在每個(gè)儲藥槽的出藥口都設計有自動(dòng)出藥機構。這種自動(dòng)化藥房可以通過(guò)控制多儲藥槽出藥口動(dòng)作來(lái)提高工作效率,通過(guò)改變儲藥槽的數量來(lái)滿(mǎn)足不同醫院的實(shí)際藥品存儲需求。但是此類(lèi)設計限制了瓶裝藥品的使用,也存在自動(dòng)化藥房設備內部存儲空間資源浪費,由于每個(gè)儲藥槽的出藥口都安裝有出藥裝置,使所需實(shí)現自動(dòng)控制的地方增多,所以其生產(chǎn)成本會(huì )較高。

3)適用于散裝藥品的自動(dòng)化藥房
此類(lèi)自動(dòng)化藥房主要是通過(guò)氣動(dòng)機械手抓取有一定規格的塑料瓶或者散裝藥片,機械實(shí)現所需藥品的灌裝、封口和貼標簽等一整套工作。使用這種自動(dòng)化藥房方便將患者的個(gè)人信息以及用藥信息打印在包裝袋上,可有效防止藥品錯發(fā)情況的發(fā)生,在國外發(fā)達國家的醫院中應用較為廣泛。由于我國的社會(huì )實(shí)情和國外不盡相同,所以這種機型不適合在國內發(fā)展使用,就目前國內醫院和門(mén)診藥店使用情況來(lái)看,使用此類(lèi)機型的場(chǎng)合十分少。日本TOSHO公司生產(chǎn)的全自動(dòng)單劑量分包機是這類(lèi)自動(dòng)化藥房的典型代表,如圖6所示。

4)回轉柜式自動(dòng)化藥房
回轉柜式自動(dòng)化藥房具有藥容量大、取藥方便的特點(diǎn),同時(shí)此類(lèi)藥房的占地面積比較小,可以很有效的利用空間。這類(lèi)自動(dòng)化藥房的設計理念和數控回轉式立體倉庫相似,為了更符合人機工程學(xué),設計上加有保護裝置且更加人性化。藥房可與醫院HIS系統連接,由醫院的管理系統直接控制。德國Hanel公司生產(chǎn)的數控回轉柜式自動(dòng)化藥房是這類(lèi)藥房的典型代表,如圖7所示。

但是這種藥房不能實(shí)現藥品出入庫完全自動(dòng)化,需要工作人員參與藥品的發(fā)放和存儲。相比較其他類(lèi)型的藥房,回轉柜式自動(dòng)化藥房工作時(shí)會(huì )產(chǎn)生較大的噪音,同時(shí)其工作速度慢,不能很好滿(mǎn)足藥品快速發(fā)放的要求。
1.2.2自動(dòng)化藥房在國內的發(fā)展現狀
由于我國工業(yè)水平與科學(xué)技術(shù)相對發(fā)達國家比較落后,所以國內關(guān)于自動(dòng)化藥房的研究成果與國外相比差距較大。雖然國外發(fā)達國家的自動(dòng)化藥房技術(shù)已經(jīng)很成熟,但國內就醫政策與國外差別,只有極少數的國外產(chǎn)品可在我國應用。目前國內大型三甲醫院對自動(dòng)化藥房的使用比較廣泛,大部分醫院還一直處在使用傳統藥房階段,但隨著(zhù)醫院信息化建設的不斷深入,研發(fā)適合國內醫院藥房的自動(dòng)化藥房設備已成為必要的發(fā)展趨勢,而且擁有著(zhù)巨大的市場(chǎng)需求。在我國的國家863計劃項目中就包含智能化藥房,該項目最終成功實(shí)現生產(chǎn)。但是其設計的自動(dòng)化藥房受限于藥品的包裝類(lèi)型,同時(shí)不能滿(mǎn)足大型醫院的發(fā)放量,所以未做推廣。
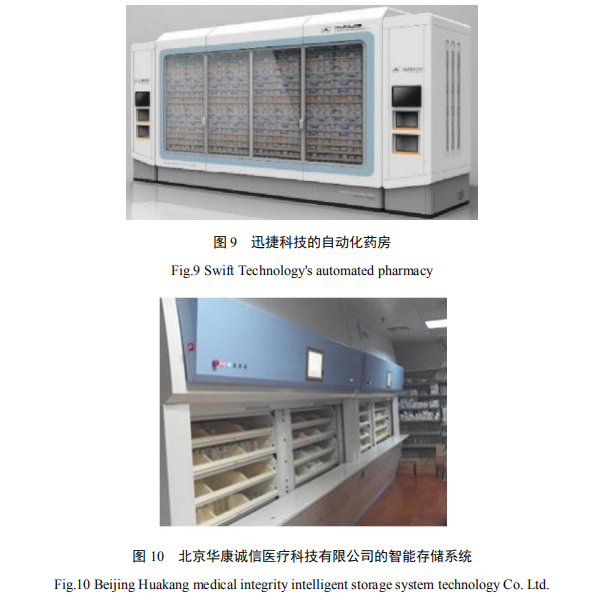
目前我國自動(dòng)化藥房設備的研發(fā)效果明顯,國內相關(guān)公司已能生產(chǎn)出滿(mǎn)足我國市場(chǎng)需求的自動(dòng)化藥房。當前國內自動(dòng)化藥房設備性能比較優(yōu)越的有北京華康、蘇州艾隆、江蘇迅捷等公司,如圖8、圖9所示。這些自動(dòng)化藥房設備都能夠實(shí)現藥品的大量?jì)Υ嬉约拜^高的發(fā)藥效率,并且可以根據不同醫院藥房的不同需求進(jìn)行相應改進(jìn)。
我國國內自動(dòng)化藥房設備市場(chǎng)上流行的自動(dòng)化藥房形式多是儲藥槽式自動(dòng)化藥房,用以適應國內醫院的大發(fā)藥量需求,其次主要是因為醫院藥房中的絕大多數藥品屬于盒裝藥品范疇。同時(shí)醫院藥房還包含有粉針劑和散裝藥片劑以及袋裝液劑,對于散裝藥片劑目前多使用分包機實(shí)現處理自動(dòng)化。針對粉針劑與袋裝液劑多使用智能存儲系統,這類(lèi)系統多以回轉柜式自動(dòng)化藥房的形式實(shí)現,如圖10所示。該類(lèi)智能系統一般通過(guò)機器實(shí)現對所取藥品的位置定位,每個(gè)定位位置都有提示裝置,被定位位置會(huì )在定位后給出提示,然后由人工實(shí)現藥品的存儲與抓取。此外,針對一些日發(fā)藥量較小的門(mén)診或者藥房多使用機械手式自動(dòng)化藥房。
國內外的自動(dòng)化藥房設備都要實(shí)現三個(gè)必備條件,分別是發(fā)藥、上藥、儲藥。
但我國實(shí)際國情與歐美等發(fā)達國家不同,針對國內大中型醫院,設計出滿(mǎn)足其要求的自動(dòng)化藥房應考慮多個(gè)方面。例如自動(dòng)上藥系統、密集存儲系統、自動(dòng)出藥系統、自動(dòng)分揀系統、藥品庫存管理系統、處方信息處理系統以及與醫院HIS系統和其他自動(dòng)藥品配送設備的接口等。

1.2.3自動(dòng)化藥房的發(fā)展趨勢
自動(dòng)化藥房出現的意義在于能夠實(shí)現自動(dòng)上藥與取藥,目前我國的社會(huì )發(fā)展雖有進(jìn)步但是還不完善,由于資金不足與自生產(chǎn)能力不足,許多醫院的藥房仍然選用之前的建造模式,自動(dòng)化藥房設備沒(méi)能實(shí)現所有醫院都有的景象。我國于2006年購買(mǎi)了第一臺國外的設備-Rowa,目前國內已有大量醫院在使用自動(dòng)化藥房,其中既有購買(mǎi)國外的也有購買(mǎi)國內的。隨著(zhù)科學(xué)技術(shù)的不斷進(jìn)步與適應現代藥房的實(shí)際需求,自動(dòng)化藥房的發(fā)展趨勢可大致分為以下四類(lèi):
1)藥品管理信息化。可以了解所有藥品的相關(guān)數據,確保藥房中的所有藥品信息都是有據可查的。同時(shí),對于使用期限即將到來(lái)的藥品能夠及時(shí)給出警示,保證出售的每一盒藥品都是安全的。此外,當有藥品需要出庫時(shí),我們可以選擇有效期較近的藥品。
2)存取系統智能化。在實(shí)際取藥過(guò)程中,藥房工作人員不需要自己去找尋相應藥品,使用機器取而代之完成工作,工作人員只需要對機器所取藥品進(jìn)行產(chǎn)品檢驗,確定無(wú)誤后將藥品發(fā)放給患者,提高速度的同時(shí)還能保證發(fā)藥質(zhì)量。
3)發(fā)藥系統自動(dòng)化。藥房達到自動(dòng)化發(fā)藥后,可縮短發(fā)藥用時(shí),避免了一些人為因素產(chǎn)生的失誤,減輕工作人員工作強度的同時(shí)也可以更好地為醫院患者服務(wù)。4)藥房管理自動(dòng)化。實(shí)現了對所有進(jìn)出藥房的藥物的相關(guān)信息的記錄,也可實(shí)現對出入庫藥品數量的計算,實(shí)時(shí)顯示庫內藥品數量,容易把握何時(shí)該購買(mǎi)藥品。
1.3總體要求
根據醫院藥房的日處方量以及實(shí)際需求,設計研究一種安裝在導軌上的新型取藥機械手裝置,使其能夠在水平和豎直方向上移動(dòng)。此外,機械手能夠準確定位到取藥位置,再將藥品穩定、快速且準確地轉移至指定地點(diǎn),無(wú)論是盒裝藥品還是瓶裝藥品都可實(shí)現穩定可靠的抓取。
設計中的取藥機械手既能夠完成對藥品的收、發(fā)工作,做到基本上全程不需要人來(lái)協(xié)助,同時(shí)還要求所設計機構具有結構簡(jiǎn)單、維護簡(jiǎn)單方便、穩定性高的特點(diǎn),通過(guò)對其結構的簡(jiǎn)單修改可實(shí)現適用大處方量的醫院與小發(fā)藥量的藥房。此外,由于藥房為醫院必要基礎建設,所以自動(dòng)化藥房的整體建設要滿(mǎn)足醫院相關(guān)要求。由于醫院的特殊性,在衛生環(huán)境以及安靜程度上的要求比較大。這就要求自動(dòng)化藥房在設計上要清潔度高且運行時(shí)產(chǎn)生的噪音小,所以在驅動(dòng)應用上要多方面考慮。
目前驅動(dòng)方式應用較多的有三種形式,分別是液壓驅動(dòng)、氣壓驅動(dòng)、電機驅動(dòng)。但事實(shí)應用表明,液壓驅動(dòng)存在漏油現象,不符合自動(dòng)化藥房清潔度高的要求;氣動(dòng)驅動(dòng)控制精度較低,不能實(shí)現準確定位,而且需要配備氣泵,占用設計空間;電機驅動(dòng)運行時(shí)產(chǎn)生的工作聲音小、定位準確、響應速度快、可承受載荷大。
綜合比較上述三種驅動(dòng)方式,并考慮自動(dòng)化藥房設計要求,在驅動(dòng)方式的選擇上電機驅動(dòng)為最優(yōu)方案。
1.4論文研究的主要內容
本文課題主旨是設計一種適用自動(dòng)化藥房取藥的新型取藥機械手,設計內容包含取藥機械手整體結構設計、運動(dòng)學(xué)分析、動(dòng)力學(xué)與運動(dòng)學(xué)仿真、控制系統設計。
具體章節內容如下:
1)闡述了課題研究的背景和意義,介紹了自動(dòng)化藥房在世界范圍內工業(yè)機器人飛速發(fā)展的背景下,其在國內外的發(fā)展現狀;規劃了課題在實(shí)際進(jìn)行中需注意的方面以及應滿(mǎn)足的各種要求。
2)自動(dòng)化藥房取藥機械手整體結構設計與研究。陳述了整體結構的各組成部分,詳細介紹了自動(dòng)化藥房取藥機械手的工作過(guò)程。針對本次設計實(shí)際情況對驅動(dòng)裝置的類(lèi)型進(jìn)行了選擇,選擇了驅動(dòng)各動(dòng)作機構的電機型號和電動(dòng)推桿型號。
3)對取藥機械手進(jìn)行運動(dòng)學(xué)分析。根據所建模型機構原理,運用改進(jìn)的D-H參數法建立干系坐標,求得機械手末端執行機構的位姿方程。使用MATLAB軟件得到各個(gè)取藥動(dòng)作的位姿圖與取藥運動(dòng)范圍圖。
4)對取藥機械手進(jìn)行動(dòng)力學(xué)分析。將取藥機械手模型結構進(jìn)行簡(jiǎn)化,導入ADAMS軟件中添加相應的約束和驅動(dòng),之后進(jìn)行仿真分析得到運動(dòng)狀態(tài)演示和各動(dòng)作機構的位移、速度、加速度、角速度等曲線(xiàn)圖,為控制系統設計提供理論依據。
5)取藥機械手控制系統設計。本次設計選用PLC編程控制,對控制系統的硬件進(jìn)行了設計與選型,此外設計了軟件控制流程圖,編寫(xiě)了PLC梯形圖。
第 2 章 自動(dòng)化藥房取藥機械手結構研究
2.1 自動(dòng)化藥房取藥機械手的設計要求
2.2 自動(dòng)化藥房取藥機械手總體結構設計
2.2.1 取藥機械手爪升降機構設計
2.2.2 取藥機械手爪設計
2.2.3 手爪伸縮裝置的設計
2.2.4 臨時(shí)儲藥裝置的設計
2.3 自動(dòng)化藥房取藥機械手主要部件尺寸確定
2.4 自動(dòng)化藥房取藥機械手驅動(dòng)方案設計
2.4.1 驅動(dòng)方案選擇
2.4.2 各動(dòng)作部位驅動(dòng)選型
2.5 本章小結
第 3 章 取藥機械手運動(dòng)學(xué)與動(dòng)力學(xué)分析
3.1 運動(dòng)學(xué)分析
3.1.1 工業(yè)機器人運動(dòng)學(xué)
3.1.2 齊次變換
3.1.3 取藥機械手運動(dòng)學(xué)方程
3.2 動(dòng)力學(xué)分析
3.2.1 工業(yè)機器人動(dòng)力學(xué)
3.2.2 取藥機械手各關(guān)節速度與動(dòng)能方程
3.3 本章小結
第 4 章 基于 MATLAB 與 ADAMS 的取藥機械手仿真
4.1 基于 MATLAB 的取藥機械手運動(dòng)學(xué)仿真
4.1.1 MATLAB 軟件簡(jiǎn)介
4.1.2 取藥機械手運動(dòng)仿真
4.2 基于 ADAMS 的取藥機械手動(dòng)力學(xué)仿真
4.2.1 ADAMS 軟件模型仿真的設計流程
4.2.2 取藥機械手動(dòng)力仿真
4.3 本章小結
第 5 章 自動(dòng)化藥房取藥機械手控制系統設計
5.1 取藥機械手控制系統簡(jiǎn)介
5.1.1 控制系統在整個(gè)自動(dòng)化藥房體系中的重要作用
5.1.2 選擇控制器
5.2 取藥機械手取藥控制系統設計
5.2.1 控制系統的硬件設計
5.2.2 PLC 控制系統軟件的設計
5.2.3 PLC 符號地址定義及梯形圖編寫(xiě)
5.3 本章小結
結論
本文分析了近年來(lái)國內外的自動(dòng)化藥房類(lèi)型以及工作原理,結合不同取藥方式的自動(dòng)化藥房在市場(chǎng)上的使用程度,旨在提高取藥速度與工作穩定性,設計了一種新型自動(dòng)化藥房取藥機械手。對自動(dòng)化藥房取藥機械手進(jìn)行了整體結構設計,在取藥機械手運動(dòng)學(xué)和動(dòng)力學(xué)方面做了仿真分析,在其控制系統硬件和軟件方面做了簡(jiǎn)要設計。具體研究成果如下:
1)做出了自動(dòng)化藥房取藥機械手的整體結構設計,利用繪圖軟件Solidworks建立三維模型,確定了整體結構中部分比較重要的結構參數。綜合考慮取藥機械手工作環(huán)境與預設要求,以及定位精度要求,對各個(gè)驅動(dòng)裝置做了相應的選型。
2)根據所建模型機構原理進(jìn)行運動(dòng)學(xué)分析,運用改進(jìn)的D-H參數法建立干系坐標,確定干系坐標中各參數的值,利用齊次變換方程求得機械手末端執行機構的位姿方程。最后在MATLAB軟件中編程得到各個(gè)取藥動(dòng)作的位姿圖與取藥運動(dòng)范圍圖,驗證了取藥機械手可到達預定位置取藥的可靠性。
3)使用ADAMS軟件對自動(dòng)化藥房取藥機械手進(jìn)行動(dòng)力學(xué)仿真分析,進(jìn)行動(dòng)畫(huà)仿真演示,演示結果表明可實(shí)現預定的取藥動(dòng)作。使用step函數得到位移、速度、角速度等曲線(xiàn),驗證了取藥機械手可完成所需取藥動(dòng)作的可靠性,且各動(dòng)作的最大速度在設定值范圍內,為取藥機械手的控制系統設計與選型提供依據。
4)對取藥機械手控制系統進(jìn)行了簡(jiǎn)要設計,選用LabVIEW對工控機界面進(jìn)行設計,使用歐姆龍CPIH系列PLC作為下位機。在控制系統硬件設計方面,給出了硬件控制系統結構圖,明確了個(gè)動(dòng)作機構的控制順序;在控制系統軟件設計方面,在CX-one上對PLC程序進(jìn)行編程,選擇順序控制指令來(lái)進(jìn)行編程,給出了取藥機械手的軟件流程圖與電機運行順序流程圖,編寫(xiě)了PLC梯形圖。
本次研究由于受經(jīng)費以及生產(chǎn)條件的限制,取藥機械手未能實(shí)際制作調試,所以存在幾點(diǎn)不足之處:
1)準確定位與否未知因為未能將整體結構加工生產(chǎn)成形,所以無(wú)法進(jìn)行控制調試,也就不能確保每次動(dòng)作都能到達預期的指定位置。
2)自動(dòng)化藥房?jì)葦[藥空間有浪費由于在在取藥機械手結構設計中加入了臨時(shí)儲藥裝置,使得取藥機械手爪的整體高度增加,導致取藥機械手在自動(dòng)化藥房下部取藥時(shí)的高度比未加臨時(shí)儲藥裝置時(shí)高,在這個(gè)高度下的位置不能用來(lái)擺放藥品。
參考文獻
[1] 孫英飛, 羅愛(ài)華。 我國工業(yè)機器人發(fā)展研究[J]. 科學(xué)技術(shù)與工程, 2012, 12(12):2912-2918.
[2] 計時(shí)鳴, 黃希歡。 工業(yè)機器人技術(shù)的發(fā)展與應用綜述[J]. 機電工程, 2015, 32(1):1-13.
[3] 駱敏舟, 方健, 趙江海。 工業(yè)機器人的技術(shù)發(fā)展及其應用[J]. 機械制造及其自動(dòng)化, 2015,01:1-4.
[4] 趙杰。 我國工業(yè)機器人發(fā)展現狀與面臨的挑戰[J]. 航空制造技術(shù), 2012, 12:26-29.
[5] 李宇劍, 巢明。 我國工業(yè)機器人產(chǎn)業(yè)現狀與發(fā)展戰略探討[J]. 制造業(yè)自動(dòng)化, 2010,15:106-108.
[6] 羅泳賢, 馮開(kāi)鈺, 汪小惠, 等。 我院門(mén)診自動(dòng)化藥房的建立效果探討[J]. 北方藥學(xué), 2016,13(2):170.
[7] 韓 晉 , 劉麗 萍 , 謝進(jìn) , 等 . 自 動(dòng)化 設 備對 醫 院藥 房 的 影響 [J]. 中 國藥房 , 2006,19:1469-1471.
[8] 王冬梅, 唐灝江。 藥房自動(dòng)化是醫院藥房發(fā)展的必然趨勢[J]. 甘肅醫藥, 2012, 08:615-617.
[9] 趙陶麗。 藥房自動(dòng)化是醫院藥房發(fā)展的必然趨勢[J]. 首都醫藥, 2009, 24:31.
[10] KING H. Self-localization of mobile robot using omni-directional vision[J]. proceedings of the7th Korea-Russia International Symposium on Science and Technology, 2003, 2(28):86-91.
[11] FINK D, RHO JAE JEUNG. Feasible connectivity solutions of PLC for rural and remoteareas[J]. Power Line Communications and Its Applications, 2008, 4:158-163.
[12] 李成群, 王偉, 贠超, 等。 自動(dòng)化藥房的現狀和新進(jìn)展[J]. 機器人技術(shù)與應用, 2007,05:27-32.
[13] 劉赫然。 自動(dòng)化配藥裝置的現狀及發(fā)展趨勢[J]. 科技展望, 2016, 22:62.
[14] 李桂莉, 武洪恩, 劉志海。 搬運機械手的運動(dòng)學(xué)分析[J]. 煤礦機械, 2007, 28(2):62-65.
[15] 孫樹(shù)棟。 機器人技術(shù)基礎[M]. 西安:西北工業(yè)大學(xué)出版社, 2006.
[16] 牧野洋, 謝存禧, 鄭時(shí)雄。 空間機構及機器人機構[M]. 北京:機械工業(yè)出版社, 2003.
[17] BESSONNET G, LALLEMAND J F. International conference on roboties and automation[C].Atlanta, USA:IEEE service center, 2003:270-275.
[18] VAKIL, M, FOTOUHI, R, NIKIFORUK, P.N. A new method for dynamic modeling offlexible-link flexible-joint manipulators [J]. Journal of Vibration and Acoustics, Transactionsof the ASME, 2012, 134 (1):1-11.
[19] 徐元昌。 工業(yè)機器人[M]. 北京:中國輕工業(yè)出版社, 1998[20] LIN L J, LIU H S, RAO X X, et al. Research on kinematics simulation of ARB-120 robotbased on MATLAB[J]. Modular Machine Tool & Automatic Manufacturing Technique,2013(3):67-69.
[21] PAUL R.P.B.E. SHIMANO and G. MAYER. Kinematic Control Equations for SimpleManipulators[J]. IEEE Trans SMC, 1981:449-455.
[22] 趙錦榮, 丁維亞, 盛小明。 基于Matlab的拉伸機上下料機械手運動(dòng)學(xué)仿真分析[J]. 蘇州大學(xué)學(xué)報, 2012, 32(1):28-32.
[23] 郭聳。 水平四自由度裝配機器人的設計及其運動(dòng)學(xué)和動(dòng)力學(xué)仿真分析[D]. 上海:上海交通大學(xué), 2007.
[24] A. KUMAR, K.J. WALDRON. The workspaces of a mechanical manipulator[J]. Journal ofmechanical design, 1981, 103(7): 665-672.
[25] 袁文康, 同志學(xué)。 基于 MATLAB 的四自由度液壓機械手運動(dòng)軌跡規劃研究[J]. 礦山機械,2014, 42(4):110-113.
[26] KUMAR A V, LEE J. Step function representation of solid models and application to meshfree engineering analysis[J]. Journal of Mechanical Design, 2006, 128(1):3357-3362.
[27] 黃旭楠, 岳夏, 冼頌智。 基于 MATLAB 的碼垛機械手運動(dòng)學(xué)分析與仿真[J]. 機床與液壓,2017, 45(5):35-39.
[28] 王曉強, 王帥軍, 劉建亭。 基于 Matlab 的 IRB 工業(yè)機器人運動(dòng)學(xué)分析[J]. 機床與液壓,2014, 42(3):54-57.
[29] 靳龍, 李玉奇, 曾昊。 基于 ADAMS 的某大型液壓挖掘機建模與仿真分析[J]. 現代制造工程, 2017(11):100-104.
[30] 姜雪梅。 工業(yè)機器人運動(dòng)學(xué)研究[D]. 濟南:山東科技大學(xué), 2013.
[31] 沈敏德, 陳照強, 張緒鵬, 等。 盒裝藥品自動(dòng)分揀系統的模塊化設計方法[J]. 機械設計,2011, 28(10):11-14.
[32] 武洪恩, 史大光, 王寶仁。 含絲杠連桿驅動(dòng)機構的機器人操作臂廣義雅克比[J]. 機械設計,2001, 18(9):43-45.
[33] QIANG Z, LU J, ZHOU D, et al. Nonholonomic motion planning for minimizing basedisturbances of space manipulators based on multi-swarm PSO[J]. Robotica, 2015,35(4):861-875.
[34] ZHANG L, JIA Q, CHEN G, et al. The Precollision Trajectory Planning of Redundant SpaceManipulator for Capture Task[J]. Advances in Mechanical Engineering,2014(1):371673-371673.
[35] 瞿亮。 基于 MATLAB 的控制系統計算機仿真[M]. 北京:清華大學(xué)出版社, 2006.
[36] XIE B, CAI Z X. Simulation experimental teaching of robotics based on MATLAB roboticstoolbox[J]. Computer Education, 2010(19):140-143.
[37] TSUNEO YOSHIKAWA. Manipulability of robotic mechanisms[J]. The International Journalof Robotics Research, 1985, 4(2):3-9.
[38] 蔣昊俁, 宋健, 胡軍, 等。 基于 ADAMS 的碼垛機械手仿真[J]. 機床與液壓, 2016,44(23):7-9.
[39] XU Y. The application of MATLAB in data fitting[J]. Science Mosaic, 2007(1):145-146.
[40] 王殿君, 關(guān)似玉, 陳亞, 等。 六自由度搬運機器人動(dòng)力學(xué)分析及仿真[J]. 機械設計與制造,2017(1):25-29.
[41] 郭衛東, 李守忠, 馬璐。 ADAMS 2013 應用實(shí)例精解教程[M]. 北京:機械工業(yè)出版社,2015.
[42] 徐大偉, 吳海濤, 劉泓濱。 基于 ADAMS 新型鋁錠堆垛機械手的運動(dòng)學(xué)仿真與分析[J]. 新技術(shù)新工藝, 2014(5):102-104.
[43] 王遠東。 基于 Adama 和 Matlab 的 6-D0F 機械手動(dòng)力學(xué)分析[J]. 裝備制造技術(shù),2017(5):12-15.
[44] H.R. ChOI, S.M.RYEW. Robotic system with active steering capability for internal inspectionof urban gas pipelines[J]. Mechatronics, 2002: 713-716.
[45] 崔繼仁, 張會(huì )清。 電氣控制與 PLC 應用[M]. 北京:中國建材工業(yè)出版社, 2016.
[46] ALP TEKIN ERGENC, DENIZ ?ZDE KOCA. PLC controlled single cylinder diesel-LPGengine[J]. Fuel, 2014, 130:273-278.
[47] GOMES DESA, ANTONINO, ZACHMANN. Virtual reality as a tool for Verification ofAssembly and Maintenance Processes[J]. Computers and Graphics, 1999(3):389-403.
[48] 李成群, 黃寶旺, 樊鴻偉, 等。 基于PLC的自動(dòng)化藥房出藥系統的研究[J]. 制造業(yè)自動(dòng)化,2014, 36(11):99-101.
[49] 韋宏利, 史媛, 溫軍會(huì )。 基于 PMAC 與 LabVIEW 的多軸運動(dòng)控制系統的開(kāi)發(fā)[J]. 西安工業(yè)大學(xué)學(xué)報, 2012, 32(2):112-118.
[50] LIU F L. The skills of the choice of PLC program design[J]. Journal of Chongqing Industry &Trade Polytechnic, 2010(1):48-51.
致 謝
時(shí)光荏苒,行文至此,我的碩士生涯已經(jīng)接近尾聲,為期兩年半的學(xué)習時(shí)光既漫長(cháng)又短暫,其中充滿(mǎn)了酸甜苦辣,但更多的是收獲和成長(cháng)。在此感謝陪伴我一起度過(guò)美好時(shí)光的每一位尊敬的老師和親愛(ài)的同學(xué),正是你們的幫助,我才能克服困難,正是你們的指導,我才能解決疑惑,使我的學(xué)業(yè)能夠順利完成。
本人的學(xué)位論文是在我的恩師李成群教授的殷切關(guān)懷和耐心指導下完成的。在日常生活中,李老師以其寬廣的胸襟待我,平時(shí)身受其樂(lè )觀(guān)堅毅和信任坦誠的性格影響。衷心感謝我的恩師對我的淳淳教誨和悉心關(guān)懷。從課題的選擇、項目的實(shí)施、直至論文的最終完成,李教授都始終給予我耐心的指導和支持,我取得的每一點(diǎn)進(jìn)步都凝聚著(zhù)恩師的汗水和心血。恩師開(kāi)闊的視野、嚴謹的治學(xué)態(tài)度、精益求精的工作作風(fēng),深深地感染和激勵著(zhù)我,在此謹向李教授致以衷心的感謝和崇高的敬意。
感謝實(shí)驗室的全體成員與我一道分享他們青春的快樂(lè )。在此還要對實(shí)驗室所有師兄弟在平時(shí)開(kāi)展相關(guān)工作中的支持和幫助一并表示感謝。感謝我的伙伴們在實(shí)驗過(guò)程和論文寫(xiě)作過(guò)程中提供的熱心幫助。因為他們提供無(wú)私的幫助,沒(méi)有他們的幫助就沒(méi)有這篇論文的順利完成。
最后,我要向百忙之中參與審閱、評議本論文各位老師、向參與本人論文答辯的各位老師表示由衷的感謝。人生的每個(gè)階段都值得好好珍惜,這段美好歲月因為有你們的關(guān)心和幫助,我很幸福。我會(huì )更加勤奮學(xué)習、認真研究,我會(huì )努力做得更好,我想這也是我能給你們的最好的回報。把最美好的祝福獻給你們,愿永遠健康、快樂(lè )。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)