24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
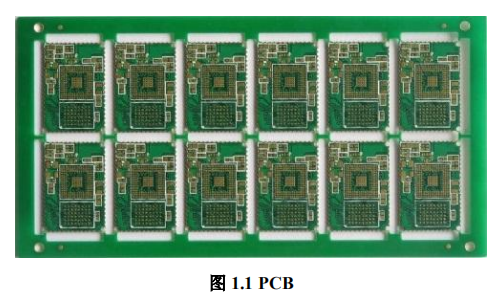
PCB(Printed Circuit Board)是承載各種電子元件的母板,在電子信息行業(yè)中具有重要的地位.隨著(zhù)電子信息行業(yè)的發(fā)展,對電子元件裝配的效率和質(zhì)量要求也越來(lái)越高.傳統的裝配方法是人工裝配電子元件,工作效率低,且裝配質(zhì)量差,近年來(lái)也出現很多自動(dòng)化裝配設備,但是該類(lèi)設備一般為剛性機械手,裝配過(guò)程中易對 PCB造成二次損壞.因此為提高裝配質(zhì)量、降低廢品率,本文設計了電子元件柔性裝配機械手.
本文以?xún)煞N不同類(lèi)型的電子元件(安規電容和電解電容)為例,基于 SolidWorks三維建模軟件,設計了一種電子元件柔性裝配機械手,該機械手適用于多種電子元件,與剛性機械手相比具有更高的適應性和安全性.本文研究的主要內容為裝配機械手機械結構的選型設計和控制系統的選型設計.主要完成的工作有:
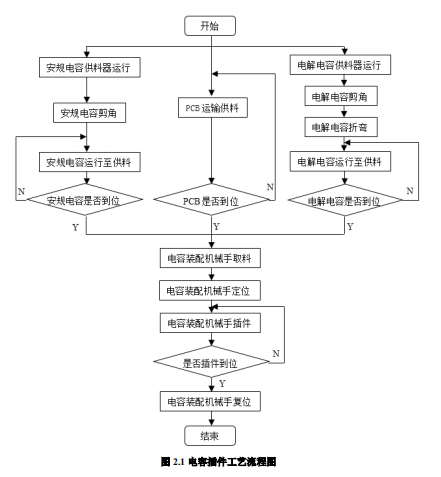
(1) 對 PCB 生產(chǎn)線(xiàn)電子元件裝配工藝進(jìn)行了方案分析,確定了電容供料和 PCB輸送的工作方案,對裝配機械手進(jìn)行了整體結構設計.
(2) 對機械手的核心模塊--Z 方向模塊進(jìn)行了結構設計.本文提出了雙凸輪和滾珠絲杠花鍵軸兩種不同的傳動(dòng)方案,雙凸輪方案中確定了改進(jìn)正弦加速度運動(dòng)規律并對運動(dòng)規律進(jìn)行了角度、速度和加速度計算與分析,得出了運動(dòng)規律曲線(xiàn)圖;對滾珠絲杠花鍵軸進(jìn)行了選型計算和動(dòng)作原理分析.通過(guò)比較各方案優(yōu)缺點(diǎn),選擇滾珠絲杠花鍵軸的設計方案.
(3) 針對電子元件裝配夾爪提出了兩種方案,并對各方案的優(yōu)缺點(diǎn)進(jìn)行了比較,最終選定了柔性?shī)A爪方案,并對柔性?shī)A爪的配件進(jìn)行了結構設計,對爪指和電容進(jìn)行了有限元分析,確定了裝配電子元件前爪指與電子元件之間的間隙.
(4) 對該機械手的控制系統進(jìn)行了部分選型與設計,主要包括電機驅動(dòng)器的選型、傳感器的選型和 PLC 的選型與設計.
關(guān)鍵詞:直角坐標機械手;電子元件;柔性?shī)A爪;PLC
Abstract
PCB (Printed Circuit Board) was the motherboard that carries various electronic components and played an important role in the electronic information industry. With the development of electronic information industry, the requirement of efficiency and quality of electronic component assembly was becoming higher and higher. Traditional assembly method was manually assembling electronic components, which had low efficiency and poor quality of assembly. There were many automation assembly equipment in recent years. However, this kind of equipment was generally rigid manipulator, which was liable to cause secondary damage to PCB in the assembly process. Therefore, in order to improved the assembly quality and reduced the rejection rate, this paper designed a flexible assembly manipulator for electronic components.
The paper was designed for a flexible assembly manipulator based on SolidWorks three-dimensional modeling software for two types of electronic components: safety capacitor and electrolytic capacitor. The manipulator is suitable for a variety of electronic components and has higher adaptability and security than rigid manipulator. The main content of this paper was the selection design of mechanical structure and control system of assembly machinery. The main tasks of this paper were as follows:
(1) It was analyzed that the assembling process of electronic components in PCB production line. It was determined that working scheme of capacitance feeding and PCB conveying, and the overall structure of assembling manipulator was designed.
(2) The Core Module of Manipulator--Z-Direction Module was structure designed. This paper was put forward for two different schemes of double cam and spline shaft of ball screw, the improved sinusoidal acceleration motion law was determined in the double cam scheme, and the angular displacement, angular velocity and angular acceleration of the motion law were calculated and analyzed. The curve of motion law was obtained. The type selection calculation and action principle analysis of ball screw spline shaft were carried out. Finally, the design scheme of the spline shaft of ball screw was chosen by comparing the advantages and disadvantages of each scheme.
(3) Two schemes was put forward for electronic component assembly clamps, and the flexible clamp scheme was selected by comparing the advantages and disadvantages of each scheme. The mechanical structure of the components of the flexible clamp was designed. The finite element analysis was finished for the claw finger and capacitance, and the gap between the claw finger and the electronic component was determined before assembling the electronic component.
(4) Finily, the partial control system was selected and designed, including motor driver and sensor selection, and selection and design of PLC.
Key Words:Cartesian coordinate manipulator;Electronic components;Flexible clamp;PLC
目錄
第一章 緒論............................................................................................................................ 1
1.1 課題的研究目的與意義........................................................................................... 1
1.2 國內外現狀................................................................................................................ 1
1.2.1 電子元件裝配機械手的國外現狀................................................................ 1
1.2.2 電子元件裝配機械手的國內現狀................................................................ 4
1.3 主要研究?jì)热?........................................................................................................... 7
第二章 電子元件裝配生產(chǎn)線(xiàn)設計方案.............................................................................. 9
2.1 工藝流程分析............................................................................................................ 9
2.2 設計參數要求.......................................................................................................... 11
2.2.1 電子元件的工藝要求................................................................................... 11
2.2.2 PCB 的工藝要求 ........................................................................................... 11
2.3 電容供料器.............................................................................................................. 13
2.3.1 安規電容供料器........................................................................................... 13
2.3.2 電解電容供料器........................................................................................... 14
2.4 PCB 輸送供料形式選擇 ......................................................................................... 14
2.5 電子元件裝配機械手方案分析 ............................................................................ 16
2.6 本章小結.................................................................................................................. 17
第三章 電子元件裝配機械手的選型與設計.................................................................... 19
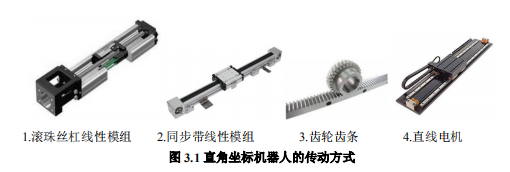
3.1 各方向模塊傳動(dòng)方式的選定................................................................................. 19
3.2 X 和 Y 方向模塊...................................................................................................... 20
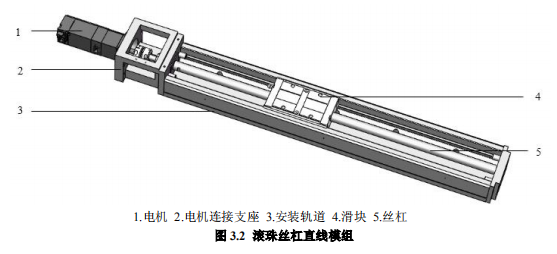
3.3 Z 方向模塊 ............................................................................................................... 22
3.3.1 Z 模塊方案一................................................................................................. 23
3.3.2 Z 模塊方案二................................................................................................. 29
3.4 各方向電機選型計算............................................................................................. 34
3.5 同步帶輪的選型計算............................................................................................. 36
3.6 本章小結.................................................................................................................. 40
第四章 夾爪的結構設計與研究......................................................................................... 41
4.1 夾爪的技術(shù)要求分析............................................................................................. 41
4.2 夾爪的設計方案 ..................................................................................................... 41
4.2.1 平行手指夾爪............................................................................................... 42
4.2.2 柔性?shī)A爪 ....................................................................................................... 44
4.2.3 爪指夾取動(dòng)作分析....................................................................................... 47
4.3 電子元件裝配機械手視覺(jué)定位系統.................................................................... 48
4.4 電子元件裝配機械手的最終設計方案................................................................ 51
4.5 本章小結.................................................................................................................. 52
第五章 控制系統的設計..................................................................................................... 53
5.1 控制系統的設計需求............................................................................................. 53
5.2 伺服電機的驅動(dòng)器模塊......................................................................................... 53
5.3 傳感器的選定與控制............................................................................................. 55
5.3.1 傳感器的選定............................................................................................... 55
5.3.2 傳感器的接線(xiàn)............................................................................................... 56
5.4 PLC 的選定與設計.................................................................................................. 57
5.4.1 PLC 的選定.................................................................................................... 57
5.4.2 PLC 關(guān)鍵程序的設計................................................................................... 58
5.5 本章小結.................................................................................................................. 60
第六章 總結與展望 ............................................................................................................. 61
6.1 總結.......................................................................................................................... 61
6.2 展望.......................................................................................................................... 61
參考文獻................................................................................................................................ 63
攻讀學(xué)位期間的研究成果................................................................................................... 67
致謝......................................................................................................................................... 69
學(xué)位論文獨創(chuàng )性聲明 ........................................................................................................... 71
學(xué)位論文知識產(chǎn)權權屬聲明............................................................................................... 71
第一章 緒論
1.1 課題的研究目的與意義
PCB 是電子元件電氣連接的載體,是承載各種電子元件的母體[1].由于它是通 過(guò)電子印刷術(shù)制作的,因此被稱(chēng)為"印刷"電路板[2].2010 年中國 PCB 產(chǎn)值高達199.71 億美元.Prismark 預測,2010 至 2015 年間中國將保持 8.10%的復合年均增長(cháng)率,高于全球平均增長(cháng)率 5.40%[3,4].
目前熱門(mén)、重點(diǎn)的 PCB 設備包括 SMT 貼片機、異形電子元件插件機、鉆孔機、電壓機、AOI、文字噴印機和四線(xiàn)飛測等[5,6],這些設備也是生產(chǎn)高端 PCB 產(chǎn)品所需要的關(guān)鍵設備.目前,這些設備的關(guān)鍵技術(shù)大多仍然掌握在國外設備企業(yè)的手中,國內的技術(shù)相對薄弱[7,8].
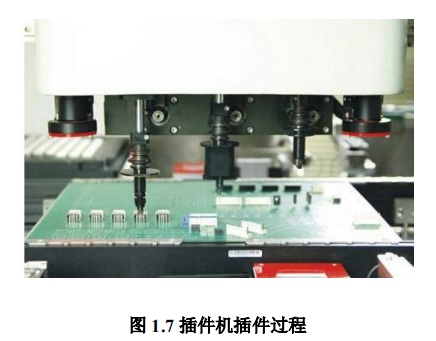
電子元件自動(dòng)插件設備(Auto-Insert Machine)是一種機電一體化設備,可自動(dòng)標準地將電子元件插裝在 PCB 板導電通孔內的.現今市面上電子元件插件有人工和機自動(dòng)化機器兩種方式,人工插件生產(chǎn)方式效率低且產(chǎn)品質(zhì)量不易保證.機器插件機的形式主要有兩種方式:SCARA 機械手式和直角坐標機械手式,其中由于直角坐標機械手結構簡(jiǎn)單、速度快和精度高的優(yōu)點(diǎn),使用較為普遍.為提高電子元件插件生產(chǎn)線(xiàn)的生產(chǎn)效率,本文就電容裝配過(guò)程進(jìn)行了研究,設計了一種生產(chǎn)效率較高的柔性裝配機械手.
1.2 國內外現狀
1.2.1 電子元件裝配機械手的國外現狀
目前,國際工業(yè)機器人領(lǐng)域的四家標桿企業(yè)分別是瑞典 ABB、德國庫卡、日本FANUC 和日本安川電機.另外,美國 Adept Technology、瑞士 Staubli、意大利 Comau、日本的川崎、愛(ài)普生、那智不二越和中國新松機器人自動(dòng)化股份有限公司也是國際工業(yè)機器人的重要供應商[9-11].
各種新型結構的機器人正在興起,特別是 Delta 系列的并聯(lián)機器人研究領(lǐng)域以 及以 Big Dog 機器人為代表的實(shí)用移動(dòng)型機器人,另外還有一些特定用途的特種機器人廣泛的應用在特殊的環(huán)境和場(chǎng)合,例如類(lèi)似 da Vinci Si 設計的手術(shù)機器人和在伊拉克和阿富汗戰場(chǎng)上時(shí)所使用的排爆機器人[12-14].

機器人的發(fā)展促進(jìn)了工業(yè)的發(fā)展,自 20 世紀 60 年代初,自動(dòng)插件技術(shù)先后經(jīng)歷了半自動(dòng)插件和全自動(dòng)插件兩個(gè)階段.國外異形電子元件自動(dòng)插件機的研發(fā)始于20 世紀 80 年代,主流廠(chǎng)家主要是日本的 JUKI、YAMAHA、Panasonic、Fuji 和美國環(huán)球自動(dòng)插件機.
日本松下的NM.2011系列軸向元件插件機具有可變更跨距(5-26mm)和插件高度的能力,可以實(shí)現兩個(gè)方向的插件,插件速度高達 0.48 秒/個(gè),可顯示并打印輸出生產(chǎn)管理信息和運載情況,利用 CRT 顯示器以對話(huà)方式進(jìn)行操作[15].

JUKI 等品牌的異形元件插件機使用了激光識別和機器視覺(jué)識別定位方式,在機械和控制系統方面都有很高的技術(shù)優(yōu)勢,但費用高,投資回收年限較長(cháng),當前較難在我國實(shí)現規模化應用.

插件機和貼片機的發(fā)展尤為迅速,而且隨著(zhù)近幾年貼片機技術(shù)的進(jìn)步,部分插件零件向貼片封裝的方式轉移,在貼片設備方面有了長(cháng)足的發(fā)展[16].在自動(dòng)插件設備方面,除了機械手的不同外,其余方面機械及控制系統基本和貼片設備都是相似的,因此貼片設備的研究方向也是插件設備研究的重要參考方向[17,18].
三星的 SM 系列的貼片機貼片速度達到 4000 片/小時(shí);其貼裝精度高達 0.03mm;元器件范圍為 20-40mm,貼裝的元器件高度為 7mm,有多達 120 個(gè)供料站位.
由日本富士公司生產(chǎn)的 CP-732 E 型貼片機是貼片機的代表.其貼裝速度達到了0.068 秒/片.若采用十六個(gè)貼裝頭同時(shí)工作,其最高速度可達到 0.0028 秒/片.每小時(shí)的貼片量可以達到 127000 片[19].
Capellan A 和 Roulet-Dubonnet O 設計了一種用于電子產(chǎn)品裝配的柔性裝配樣機.該樣機由機械臂、夾持器、傳感器、視覺(jué)系統和固定系統組成,各組成部分具有較高的自適應性,可以根據需要重新配置.并對視覺(jué)系統進(jìn)行了研究,設計了一套基于單個(gè)相機的三維定位系統[20].
Rukshan K H I,Chaminie W A N 和 Madushan M D 等人基于替代概念具有靈活性和可重構性,設計了一套不規則形狀零件的柔性?shī)A具系統的解決方案.解決了大量專(zhuān)用夾具的空間分配巨大,設計和制造的提前期長(cháng),以及在設計修改時(shí)更改設置的靈活性低等問(wèn)題[21].
Krishnan S 等人設計了一種微尺度物體夾爪,該夾爪是一種由具有閉合回路的反饋器組成的柔性機構,可以在平面內任意折疊和展開(kāi).一旦被驅動(dòng),便會(huì )折疊在物體上,實(shí)現與物體的多點(diǎn)接觸.不管物體的形狀和初始方向如何,都能確保了對物體的穩定抓握[22].
1.2.2 電子元件裝配機械手的國內現狀
經(jīng)過(guò) 30 多年的發(fā)展,中國工業(yè)機器人在國家的高度重視和大力支持下,學(xué)到了很多國外先進(jìn)技術(shù),縮短了與工業(yè)發(fā)達國家的差異[23,24].
目前,我國有很多從事機器人研發(fā)的單位,哈爾濱博實(shí)自動(dòng)化設備有限責任公司、上海機電一體化工程公司、北京機械工業(yè)自動(dòng)化所等被確立為智能機器人主題產(chǎn)業(yè)基地.此外,哈爾濱焊接研究所、國家機械局機械研究院及奇瑞汽車(chē)股份有限公司等都研發(fā)和生產(chǎn)了許多優(yōu)秀的機器人[25,26].
我國改革開(kāi)放后大量的先進(jìn)設備引入,如現在電子行業(yè)大量使用的自動(dòng)插件機、自動(dòng)貼片機,它是現代電子行業(yè)的主力設備.近幾年國內開(kāi)始自主配件開(kāi)發(fā)、制造,以滿(mǎn)足配套保障的需求.通過(guò)十來(lái)年研究表明,國內生產(chǎn)的有些配件通過(guò)改進(jìn)優(yōu)化甚至可以超越國外,成本大幅降低[27,28].
天津大學(xué)的劉夢(mèng)茹和合肥工業(yè)大學(xué)大學(xué)的婁鳳玉等人應用模塊化設計的原理對直角坐標機器人進(jìn)行設計,對企業(yè)提高設計效率,解決企業(yè)產(chǎn)品種類(lèi)與成本之間的矛盾,提高企業(yè)產(chǎn)品競爭力和增強企業(yè)靈活性等方面具有一定的借鑒作用[29,30].
楊國軍等人在 X、Y 方向采用了直線(xiàn)電機直驅,提高了直角坐標機器人的運動(dòng)速度和精度.建議將冗余雙驅動(dòng)的剛性機構更換變?yōu)橛写_定運動(dòng)的非冗余二自由度五桿機構,最后將五桿機構的非驅動(dòng)關(guān)節設計為柔性關(guān)節[31,32],消除由于對稱(chēng)設計引起的冗余驅動(dòng)[34].
王慰軍和金勤曉等人為了提高機器人的工作速度及動(dòng)態(tài)響應,在 Y 軸上采用一根光軸和兩個(gè)動(dòng)子的形式,通過(guò)電動(dòng)執行器驅動(dòng)電機帶動(dòng)兩個(gè)電動(dòng)爪沿著(zhù) Z 軸上下移動(dòng),并通過(guò) ANSYS 驗證了該雙執行器機器人結構設計的合理性[35,36].
目前我國異形電子元件插件機多采用直角坐標機器人的結構,為了提高插件機的各類(lèi)性能,各大高校和公司紛紛對這種類(lèi)型的插件機進(jìn)行了研究.
2005 年 9 月,新澤谷研發(fā)并生產(chǎn)出國內第一套真正擁有自主知識產(chǎn)權的 AI 設備:自動(dòng)臥式插件機(XG-2000)、相繼成功研發(fā)出自動(dòng)臥式聯(lián)體插件機(XG-4000)、自動(dòng)立式插件機(XG-3000)等一系列擁有自主知識產(chǎn)權的自動(dòng)化產(chǎn)品[37].

邱軍對立式插件機機電系統進(jìn)行了設計與研究,設計了電子元件引腳整腳模具,解決了因電子元件引腳不整影響插件質(zhì)量的問(wèn)題.為了減小插件時(shí)對PCB板的沖擊,使用插件氣缸電磁閥轉換的方式減速以減小插件頭對 PCB 的振動(dòng)影響[38,39].
李衛等人選定 MKP.X2 型安規電容作為研究,從插件機軸系、PCB 板自動(dòng)上下料、異形電子元件自動(dòng)上料結構、快速精密電動(dòng)夾爪的設計和選型等方面設計了 6自由度直角坐標結構形式的插件機[40,41].并通過(guò)分析影響插件機振動(dòng)的因素,改進(jìn)了插件機機械減振結構[42].
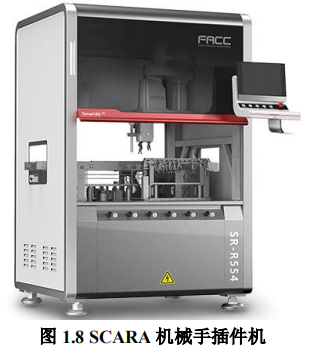
珠海智新公司設計了 SCARA 機械手插件機,其控制器與 iVT 視覺(jué)技術(shù)結合,確保了插件精度,除了實(shí)現水平快速插件外還可以實(shí)現多角度插件功能,該插件機可根據需要安裝多個(gè)插件夾爪,并且生產(chǎn)過(guò)程中根據插件元件的需求自動(dòng)進(jìn)行更換夾爪.
付文華等人對二極管管腳的校直回彈等進(jìn)行了分析研究,其中針對二極管極性辨別提出了電磁式極性辨別裝置和兩方向傾斜的極性旋轉裝置,對于簡(jiǎn)化結構具有重要的意義[43].
金濟民為了提高 LED 顯示屏的插裝效率,提出了 LED 顯示屏插件機的優(yōu)化設計方案,采用錐形孔來(lái)校正 LED 引腳,并利用 LED 外形定位的方法來(lái)提高插件精 度,省略 LED 引腳的裁剪和傳輸環(huán)節[44].
梁發(fā)新等人設計了帶有固定功能的插件機,避免了電子元件在 PCB 電路板上的跳動(dòng),減少了插裝完成的電子元件發(fā)生從 PCB 上脫落的現象,保證設備正常運行,增強設備實(shí)用性[45].
劉延遂等人針對目前機器人的異形插件機控制復雜、成本高的問(wèn)題,提出并設計了一種雙 SCARA 插件機控制系統,并設計了基于動(dòng)態(tài)系統的雙 SCARA 無(wú)碰運動(dòng)軌跡生成算法,保證了機器人在工作過(guò)程中的無(wú)碰和穩定[46].
韓浩宇和宋建提出一種針對自動(dòng)插件機的應用需求的元件引腳視覺(jué)檢測算法, 可檢測引腳完整度及成型跨距.通過(guò)形態(tài)學(xué)處理構建 ROI,運用 Canny 檢測算子對目標邊緣進(jìn)行像素級定位,然后根據曲線(xiàn)擬合原理對目標邊緣進(jìn)行亞像素級定位.最后,使用權重函數擬合目標邊緣,獲得管腳的精確位置信息[48].
孫志明等人對插件機的機械手進(jìn)行了研究,將所設計的活塞桿的上下運動(dòng)轉化為滑動(dòng)座的左右運動(dòng),從而夾緊元件,生產(chǎn)成本低,且適用范圍廣,夾緊效果好[50].
李銳等人設計了 ZHX-L2015 系列立式插件機,主要從連桿驅動(dòng)裝置和插件驅動(dòng)裝置兩個(gè)方面的設計進(jìn)行了研究,具有較高的實(shí)用價(jià)值[52].
以上機械手夾爪一般為平行手指或吸盤(pán).平行手指為剛性?shī)A爪,需要根據電子元件的尺寸定制專(zhuān)門(mén)的夾爪手指,因此如果夾取不同的電子元件,需要頻繁更換夾爪手指,且在電子元件密度較大的 PCB 上,剛性手指易對其他電子元件造成損壞.吸盤(pán)僅適合有一定平面面積的電子元件,適應范圍較小.
北京軟體機器人科技有限公司楊衛民、張磊和吳昌政等人突破傳統剛性機器人的限制,設計了一種軟體四指機器人[53,54].該機器人由一個(gè) C 形支架連接和四個(gè)軟體手指組成,四指通過(guò) C 形支架連接為整體,每個(gè)手指具有雙通道氣囊,通過(guò)氣路的出氣與進(jìn)氣控制手指姿態(tài)變形.
蘇州柔觸機器人有限公司張帆結合仿生設計理念,利用氣動(dòng)驅動(dòng)技術(shù),設計了一種帶緩沖的柔性機械手[55],緩沖組件可根據實(shí)際需要調節機械臂與機械手之間的距離.模塊化設計使柔性手指可根據需要進(jìn)行任意拼接,可拼接為兩指、三指、四指等不同的夾爪,可應用于多種工業(yè)場(chǎng)景,比如電子行業(yè)、醫療、包裝物流等多個(gè)行業(yè).
為彌補剛性機械手的不足,本文結合國內柔性手指設計理念,將柔性?shī)A爪與機械臂連接組裝成柔性機械手.
1.3 主要研究?jì)热?/strong>
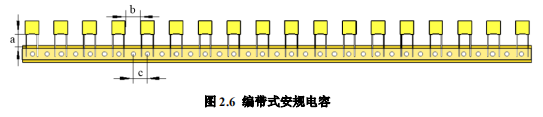
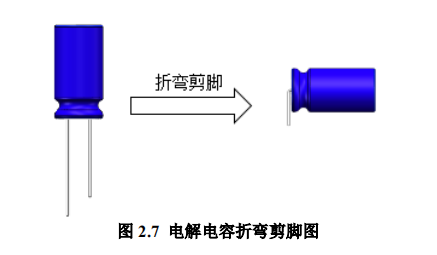
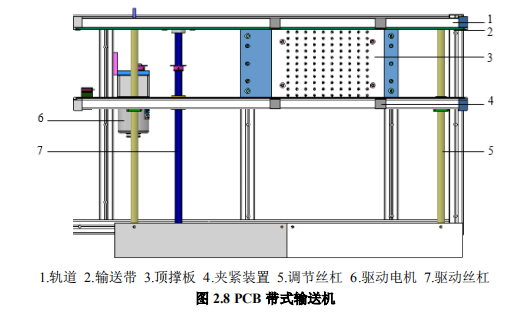
本文根據 PCB 自動(dòng)化生產(chǎn)線(xiàn)中電子元件裝配的技術(shù)要求和工作參數,設計了電子元件柔性裝配機械手,并對該機械手進(jìn)行了整體結構的設計與控制系統的研究.本文主要針對電解電容和安規電容兩種電子元件進(jìn)行裝配機械手的設計,由于電容裝配過(guò)程中還涉及到電容供料及 PCB 輸送等工序,因此本文對這兩種工序進(jìn)行了方案的討論,最終確定了帶式電容供料器和皮帶式 PCB 輸送機的方案.由于裝配過(guò)程中有兩種不同的電容,因此本文設計的機械手有兩個(gè)裝配工作端,裝配過(guò)程中需要在電容供料工位處取件,然后經(jīng)過(guò)視覺(jué)定位等將電容精確地插入 PCB 導電通孔中.該機械手可代替傳統人工裝配電子元件,解放了勞動(dòng)力,提高了 PCB 生產(chǎn)效率.
1. 電子元件裝配機械手的工作參數
電容裝配生產(chǎn)線(xiàn)占用空間必須限制在長(cháng) 1.5mm×寬 2mm×高 3mm 以?xún)?機械手工作節拍為 2.5 秒/片.
2. 電子元件裝配機械手的設計要求
機械手的工作過(guò)程具有顯示界面,能夠統計插件數量等信息;能夠與 MES 系統進(jìn)行通訊;具備視覺(jué)定位功能,準確定位插件通孔;完全實(shí)現自動(dòng)化,代替人工插件;裝配電子元件過(guò)程中,機械手不能對電子元件或 PCB 造成損壞;機械手要便于安裝、更換及維修.
3. 本文主要研究?jì)热?/p>
(1) 查閱國內外電子元件裝配機械手相關(guān)的文獻資料,了解國內外研究和發(fā)展現狀以及目前工業(yè)上自動(dòng)化裝配機械手的結構形式、運動(dòng)方式、插件速度、適應電子元件的種類(lèi)及工作過(guò)程的重點(diǎn)和難點(diǎn).并結合相關(guān)生產(chǎn)工藝及 PCB 生產(chǎn)廠(chǎng)家的實(shí)際需求,實(shí)現電子元件的自動(dòng)化裝配.
(2) 對 PCB 生產(chǎn)線(xiàn)電子元件裝配工藝進(jìn)行了方案分析,根據兩種電容裝配所需的工作參數,介紹了電容裝配生產(chǎn)線(xiàn)的工作流程.選定了電容供料和 PCB 輸送的工作方案,對裝配機械手進(jìn)行了整體結構的確定.
(3) 對裝配機械手進(jìn)行了結構設計,并對機械手 X、Y、Z 三個(gè)方向的傳動(dòng)裝置和伺服電機等進(jìn)行了選型計算,重點(diǎn)對 Z 模塊工作方式進(jìn)行了雙凸輪方案和滾珠絲杠花鍵軸方案兩種方案的討論,最終確定了滾珠絲杠花鍵軸的方案.
(4) 對電子元件裝配夾爪進(jìn)行了兩種方案的討論,最終確定了柔性?shī)A爪作為機械手的裝配工作端,并對爪指進(jìn)行了有限元分析,確定了夾取電容前爪指與電容表面的間隙,得到了電容的最大變形與應力.
(5) 選用西門(mén)子 S7-200 Smart 作為機械手的控制系統,通過(guò)控制電機轉速、限位裝置,防止傳動(dòng)裝置超行程運動(dòng)對電容裝配生產(chǎn)線(xiàn)造成損壞,安裝零點(diǎn)校位傳感器,減少累計誤差、提高插件定位的準確性,實(shí)現機械手的自動(dòng)化運行.



…………由于本文篇幅較長(cháng),部分內容省略,詳細全文見(jiàn)文末附件
第六章 總結與展望
本文設計了一種電子元件柔性裝配機械手,該機械手的作用是將電子元件(本文以安規電容和電解電容兩種電容為例)在規定時(shí)間內插入 PCB 導電通孔內.機械手主要分為 X、Y、Z 方向三個(gè)模塊.本文主要分析研究了 Z 方向模塊的傳動(dòng)方式和電子元件夾爪.該夾爪采用柔性材料,避免了對電子元件的損壞,同時(shí)提高了夾爪的利用率.
6.1 總結
本文根據 PCB 裝配生產(chǎn)線(xiàn)的技術(shù)要求和工作參數,設計了一種電子元件柔性裝配機械手,主要做了以下工作:
(1) 對電容插件生產(chǎn)線(xiàn)工藝流程進(jìn)行了研究分析,根據電容和 PCB 的技術(shù)要求對生產(chǎn)線(xiàn)各組成部分:電容供料、PCB 輸送和機械手裝配等部分提出設計方案,并比較了機械手各結構形式的優(yōu)缺點(diǎn),確定裝配機械手為直角坐標結構.
(2) 對不同方向模塊傳動(dòng)部分進(jìn)行了選型計算,并確定各部件的具體型號,利用SolidWorks 對機械手進(jìn)行了三維建模.重點(diǎn)對 Z 方向模塊進(jìn)行了研究設計,提出雙凸輪傳動(dòng)方案和滾珠絲杠花鍵軸傳動(dòng)方案.凸輪運動(dòng)規律為改進(jìn)正弦加速度運動(dòng)規 律,并對凸輪運動(dòng)規律進(jìn)行了詳細的計算,得出了運動(dòng)規律曲線(xiàn)圖.由于滿(mǎn)足設計要求的凸輪尺寸過(guò)大,為提高 Z 模塊結構的緊湊性,最終選定了方案二作為 Z 方向模塊的傳動(dòng)部分.
(3) 對電容夾爪進(jìn)行了不同方案的設計,最終確定了柔性?shī)A爪方案,對該柔性?shī)A爪進(jìn)行了三維建模,并對其配件進(jìn)行了設計,使得三指聯(lián)動(dòng),提高了夾料的穩定性,最后采用 Mooney-Rivlin 模型對爪指和電容進(jìn)行了有限元分析,得出了夾取電容前爪指與電容表面的間隙和夾取電容時(shí),電容受力情況.
(4) 對電子元件裝配機械手進(jìn)行了控制系統的研究分析,根據控制系統的設計需求,對電機驅動(dòng)器和傳感器進(jìn)行了選型與分析,并選用了西門(mén)子 S7-200 Smart 控制機械手的運動(dòng),操作簡(jiǎn)單,確保了系統的有效工作.
6.2 展望
本文主要對電子元件柔性裝配機械手進(jìn)行了設計與研究,但其中仍存在很多不足的地方有待研究和改進(jìn),以下是主要進(jìn)一步完善的內容:
(1) 本文主要對機械手結構進(jìn)行了設計,沒(méi)有考慮由于機械運動(dòng)引起的問(wèn)題,需要進(jìn)一步動(dòng)力學(xué)分析;
(2) 該機械手目前處于理論階段,缺乏實(shí)驗數據,需要進(jìn)一步驗證設計的實(shí)用性;
(3) 控制系統設計不夠完善,需進(jìn)一步研究.
致謝
三年的時(shí)間轉眼間就過(guò)去了,回想起當時(shí)剛入學(xué)的場(chǎng)景,還在感慨和師兄師姐們在一起的時(shí)光,這三年間我遇到了很多溫暖的人和事,陪伴我走過(guò)三年的研究生生活.
感謝我的導師王繼榮,她不僅是我學(xué)習上的導師,更像是我生活中的一位長(cháng)輩. 在科研學(xué)習上對我耐心的指導,在第一次發(fā)小論文的時(shí)候,非常感謝老師對我一遍又一遍的修正,另外感謝老師提供給我的各種學(xué)習機會(huì ),參加各類(lèi)學(xué)術(shù)會(huì )議;去公司實(shí)習,在實(shí)踐中我的專(zhuān)業(yè)知識得到了很大的提高并,開(kāi)闊了眼界,了解到更多的專(zhuān)業(yè)知識,也接觸到了很多優(yōu)秀的人.盲評是一個(gè)非常堅毅和勤勉的人,與盲評相 處,總能受到感染,當然我做的還遠遠不夠,非常感謝老師三年來(lái)對我的包容.
感謝實(shí)驗室各位同學(xué),與你們相處的時(shí)光是最開(kāi)心的,感謝你們對我學(xué)習上的幫助,在與大家討論的過(guò)程中,我學(xué)習到了更多新知識、新技能.感謝邵云飛、張俊玲和肖惠惠在課題中對我軟件學(xué)習的指導及建模方面的建議,使得我在學(xué)習過(guò)程中少走了很多彎路.
感謝遇見(jiàn)各位,祝愿大家以后的日子里平安順遂!
參考文獻
[1] 范小濤,夏雨人.一種基于圖像處理的 PCB 檢測算法研究[J].計算機工程與應用.2004(13):91-92.
[2] Yarlagadda,Fooke.Design and development of automatic visual inspection system for PCBmanufacturing[J].Robotics and Computer-Integrated Manufacturing,201l,27(5):949-962.
[3] 王勇.K 公司供應商質(zhì)量管理體系研究[D].廣州:華南理工大學(xué),2014.
[4] 李龍飛,王水娟,方東煒,等.一種 PCB 加工方法及 PCB 板[P].中國:CN103096631A,2013.
[5] SPCA.中國 PCB 設備發(fā)展任重而道遠[J].印制電路資訊,2011(6):16-19.
[6] 韓曉東,劉冬,叢明,等.基于 Plant Simulation 的發(fā)動(dòng)機檢測生產(chǎn)線(xiàn)仿真分析[J].組合機床與自動(dòng)化加工技術(shù),2015(11):58-60.
[7] 魯昌華,徐勝海,劉春.數字圖像處理技術(shù)在 PCB 板檢測中的應用[J].儀器儀表學(xué)報,2001,22(4):426-429.
[8] 陳世金.中國 PCB 設備發(fā)展概況及前瞻[J].印制電路信息,2012(8):7-10.
[9] 計時(shí)鳴,黃希歡.工業(yè)機器人技術(shù)的發(fā)展與應用綜述[J].機電工程,2015,32(1):1-13.
[10] Bakker G.Money for nothing:How firms have financed R&D-projects since the IndustrialRevolution[J].Res Policy,2013,42(10):1793-1814.
[11] Stenmark M,Malec J.Knowledge-based instruction of manipulation tasks for industrialrobotics[J].Robotics and Computer Integrated Manufacturing,2015,33:56-67.
[12] 趙福群.基于連桿機構的新型并聯(lián)機器人構型設計與分析[D].北京:北京交通大學(xué),2016.
[13] 杜金釗.面向實(shí)時(shí)控制的 Delta 并聯(lián)機器人動(dòng)力學(xué)計算模型研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2016.
[14] 李淵,余躍慶.并聯(lián)機器人中柔順關(guān)節代替傳統關(guān)節可行性分析[J].農業(yè)機械學(xué)報,2016,47(4):343-348.
[15] 莊德才.自動(dòng)插件機控制系統的研究[D].青島:青島科技大學(xué),2011.
[16] 孫袁,劉剛,嚴偉等.數字化工廠(chǎng)技術(shù)在電子制造領(lǐng)域的應用[J].中國電子科學(xué)研究院學(xué)報,2013,8(6):551-556.
[17] 邱君.立式自動(dòng)插件機機電系統的設計與研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[18] Peng G,Zeng K.An Ad-Hoc Method with Genetic Algorithm for Printed Circuit BoardAssembly Optimization on the Sequential Pick-and-Place Machine[C]//International Conferenceon Parallel and Distributed Computing,Applications and Technologies.IEEE,2013:128-133.
[19] 郭淼.經(jīng)濟型貼片機關(guān)鍵技術(shù)研究[D].西安:長(cháng)安大學(xué),2017.
[20] Capellan A,Roulet-Dubonnet O.Handling of Frequent Design Changes in an AutomatedAssembly Cell for Electronic Products[J].Procedia CIRP,2016,54(Complete):175-180.
[21] Rukshan K H I,Chaminie W A N,Madushan M D,et al.Design and development of flexiblefixturing system for handling irregular shaped components[C]//Moratuwa Engineering ResearchConference.2015.
[22] Krishnan S , Saggere L. Design and development of a novel micro-clasp gripper formicromanipulation of complex-shaped objects[J].Sensors and Actuators A Physical,2011,176(4):110-123.
[23] 王健.智慧工廠(chǎng) 1.0 是基于中國制造現實(shí)提出的轉型理念[J].世界科學(xué),2014(6):15-18.
[24] 顧新建,祁國寧,唐任仲.智慧制造企業(yè)未來(lái)工廠(chǎng)的模式[J].航空制造技術(shù),2010(12):26-28.
[25] 王田苗,陶永.我國工業(yè)機器人技術(shù)現狀與產(chǎn)業(yè)化發(fā)展戰略[J].機械工程學(xué)報,2014,50(9): 1-13.
[26] 孫英飛,羅愛(ài)華.我國工業(yè)機器人發(fā)展研究[J].科學(xué)技術(shù)與工程,2012,12(12):2912-2918.
[27] PAN Z,POLDEN J,LARKIN N,eta1.Recent progress on programming methods for industrialrobots[J].Robotics and Computer-Integrated Manufacturing,2012,28(2):87-94.
[28] 劉光凱.自動(dòng)插件機、自動(dòng)貼片機配件的研發(fā)、制造[J].中國科技財富,2010(10):70-71.
[29] 劉夢(mèng)茹.上下料用模塊化直角坐標機器人研究[D].天津:天津大學(xué),2010.
[30] 婁鳳玉.直角坐標機器人模塊化設計及應用[D].合肥:合肥工業(yè)大學(xué),2012.
[31] Zhu B L,Zhang X M,Sergej F.Design of single-axis flexure hinges using continuum topologyoptimization method[J].Science China Technological Sciences,2014,57(3):560-567.
[32] YANG,DENG,Zongquan,etal.Optimizing the Qusai-static Folding and Deploying ofThin-Walled Tube Flexure Hinges with Double Slots[J].Chinese Journal of MechanicalEngineering,2014,27(2):279-286.
[33] Zhu Z W,Zhou X Q,Wang R Q,etal.A simple compliance modeling method for flexurehinges[J].Science China Technological Sciences,2015,58(1):56-63.
[34] 楊國軍.基于柔性機構的冗余驅動(dòng)直角坐標機器人的優(yōu)化設計[D].太原:中北大學(xué),2015.
[35] 劉澤富.同步帶式直角坐標機器人的機體結構[P].中國:CN204221786U,2015.
[36] 王慰軍,金勤曉,張馳.一種雙執行器直角坐標機器人的設計[J].機械工程與自動(dòng)化,2016(5):117-118.
[37] 夏育平,龍緒明,黃昊,等.自動(dòng)插件機的現狀和發(fā)展[C]//2011 中國高端 SMT 學(xué)術(shù)會(huì )議.2011.
[38] 劉沖,付江梅.Research on Reliability and Availability of Dual Redundant PLC ControlSystem[J].Process Automation Instrumentation,2010,31(9):44-46,53.
[39] 邱君.立式自動(dòng)插件機機電系統的設計與研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[40] Yarlagadda,Fookes.Design and development of automatic visual inspection system for PCBmanufacturing[J].Robotic sand Computer-Integrated Manufacturing,201l,10:949-962.
[41] M.A.Montironi,P.Castellini,L.Stroppa.Adaptive autonomous positioning of a robot visionsystem:Application to quality control on production lines Original Research Article[J].Roboticsand Computer-Integrated Manufacturing,2014,10:489-498.
[42] 李衛.異形電子元件自動(dòng)插件機設計及其關(guān)鍵技術(shù)研究[D].濟南:山東大學(xué),2015.
[43] 付文華.LED 插件若干技術(shù)的研究[D].合肥:合肥工業(yè)大學(xué),2012.
[44] 金濟民,常新山,郁元正.LED 顯示屏專(zhuān)用插件機的優(yōu)化設計[J].輕工機械,2014,32(3):80-82.
[45] 梁發(fā)新,方偉杰,高喜宏,等.帶插件固定功能的插件機[P].中國:CN201957395U,2011.
[46] 劉延遂,李明軍,丁鵬程.雙 SCARA 異型插件機控制系統研究[J].機械工程與自動(dòng)化,2017(5):10-15.
[47] 曹薇.基于 SCARA 機器人的異型插件控制系統設計[J].科技創(chuàng )新與應用,2016(29):51.
[48] 韓浩宇,宋建.自動(dòng)插件機元件管腳視覺(jué)檢測算法的研究[J].機械設計與制造,2018(3):109-111.
[49] Hea Z,Fub J,Zhanga X.A uniform expression model for volumetric errors of machinetools[J].International Journal of Machine Tools and Manufa-cture,2016(100):93-104.
[50] 孫志明,傅積善.一種異型插件機的氣動(dòng)機械手[P].中國:CN104816297A,2015.
[51] 李連波.基于 ADAMS 的機械爪運動(dòng)仿真與優(yōu)化設計[J].煤礦機械,2011,32(1):35-37.
[52] 李銳,李紹東,陳躍飛.中禾旭 L2015 系列自動(dòng)插件機頭部機械結構特點(diǎn)及工藝分析[J].機電信息,2015(18):86-88.
[53] 楊衛民,張磊,吳昌政,等.一種軟體機器人[P].中國:CN202910862U,2013.
[54] 胡飛.PLC 氣動(dòng)機械手控制系統的設計與發(fā)展[J].山東工業(yè)技術(shù),2014(20):24.
[55] 張帆.一種帶緩沖功能的柔性機械手[P].中國:CN201710665670.9,2017.
[56] 郭利鋒,郭順生.擺動(dòng)式遞紙機構凸輪的仿真設計[J].包裝工程,2005,26(4):51-53.
[57] 賴(lài)興華,舒大文,唐遠強.基于 ADAMS 與 Solid Edge 的擺桿凸輪機構設計[J].新技術(shù)新工藝,2009(10):22-23.
[58] Liu Z,Liu J,Wei H.Adaptive boundary control of a flexible manipulator with inputsaturation[J].International Journal of Control,2015,89(6):1-21.
[59] Ge S S,Lee T H,Zhu G .A nonlinear feedback controller for a single-link flexible manipulatorbased on a finite element model[J].Journal of Field Robotics,2015,14(3):165-178.
[60] 肖宇.氣動(dòng)軟體機械手設計及實(shí)驗研究[D].南京:東南大學(xué),2016.
[61] 王靖棟.柔性機械手末端夾具設計研究[J].機械制造,2005,43(10):25-28.
[62] 黃震,顧啟民.高精度插件引腳機器視覺(jué)檢測系統的研究與開(kāi)發(fā)[J].機床與液壓,2015(16):139-142.
[63] 黃震,顧啟民.高精度機器視覺(jué)插件系統的研究與應用[J].組合機床與自動(dòng)化加工技術(shù),2014(10):105-108.
[64] 師忠秀.機械原理[M].北京:機械工業(yè)出版社,2012.
[65] 張朝輝.ANSYS16.1 結構分析工程應用實(shí)例解析[M].北京:機械工業(yè)出版社,2016.