24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要
嵌入式技術(shù)、物聯(lián)網(wǎng)技術(shù)、移動(dòng)互聯(lián)網(wǎng)技術(shù)突飛猛進(jìn)的發(fā)展,掀起了新一股科技發(fā)展浪潮,將這些新技術(shù)應用到機器人控制領(lǐng)域已成為機器人技術(shù)發(fā)展的一個(gè)新趨勢和研究熱點(diǎn)。本文充分利用這些新技術(shù)設計并實(shí)現了一款基于嵌入式 Linux 的移動(dòng)監控機器人,并給出了一種模塊化、通用性強且易于擴展的解決方案。該機器人具備監控現場(chǎng)視頻和環(huán)境參數功能,控制端可使用 PC 電腦或 Android 設備。本文研究?jì)热葜饕ㄒ韵聨追矫妫?/p>
首先搭建了高性能ARM CortexA8處理器S5PV210結合單片機STC12C5A60S2雙處理器結構的硬件平臺。系統通過(guò) USB 攝像頭獲取視頻數據,舵機云臺調整攝像頭視野;采用USB 無(wú)線(xiàn)網(wǎng)卡實(shí)現數據無(wú)線(xiàn)網(wǎng)絡(luò )傳輸;采用 L298N 芯片驅動(dòng)直流電機,并通過(guò) PWM 波調整轉速;采用 GPS 模塊實(shí)現定位功能;采用 1W LED 用于照明和蜂鳴器用于報警。此外,系統還搭載溫濕度傳感器、加速度傳感器和超聲波傳感器,用于獲取現場(chǎng)環(huán)境數據。其次構建了嵌入式交叉編譯開(kāi)發(fā)環(huán)境,將嵌入式 Linux 操作系統移植到了機器人硬件平臺,并對系統進(jìn)行裁剪和優(yōu)化,包括 U-Boot 移植,Linux 內核移植和裁剪,根文件系統構建和其他硬件設備驅動(dòng)程序移植。在此基礎上移植并詳細分析了開(kāi)源視頻服務(wù)器軟件mjpg-streamer 的運行流程,包括基于 V4L2 接口的視頻采集,視頻圖像的 JPEG 壓縮編碼,基于 socket 的網(wǎng)絡(luò )傳輸,并針對 S5PV210 處理器的特點(diǎn)采用硬件壓縮改進(jìn)了源碼中的軟件壓縮部分,提高了系統壓縮效率。最后開(kāi)發(fā)了基于 Qt 的 PC 端機器人控制軟件,基于Qt/Embedded的嵌入式服務(wù)器端軟件,基于A(yíng)ndroid平臺的控制端軟件和下位機單片機程序,根據系統體系結構特點(diǎn)設計了基于 Modbus 協(xié)議的自定義用戶(hù)層通信協(xié)議。經(jīng)過(guò)對整個(gè)系統軟硬件的測試、分析和總結,本設計達到了預期目標。
關(guān)鍵詞:嵌入式 Linux,移動(dòng)機器人,視頻監控,無(wú)線(xiàn)傳輸,傳感器
ABSTRACT
Along with the rapid development of embedded technology, internet of things and mobile internet, science and technology blows a new wave of development. It has become a new trend and a hot topic of the development of robotics to use these new technologies. This thesis makes the most of these new technologies to design and implement a mobile monitoring robot based on embedded linux and provides a solution, which is modular universal and easy to extend. This robot has the function of video surveillance and collecting environment parameter. The PC or Android device can act as the controller. The main contents of this thesis includes as follows:
Firstly, we build the hardware platform, which is made up of ARM Cortex A8 processor S5PV210 and STC12C5A60S2 microcontroller. This system capture video data by USB camera, pan-tilt-zoom constituted by steering gear can adjust and change the view of the camera; the data are transmitted wirelessly to the receiver through USB wireless card; the DC motor is drived by the L298N circuit, and its speed is controlled by the PWM signal; the GPS module is used to locate the positions; 1W LED constitutes the lighting system and the buzzer acts as alarm system.
Moreover, digital humidity & temperature sensor, accelerometer and ultrasonic sensors are onboard, used to collecte environment parameter. Next, we establish embedded cross-compile system develop environment, transplant embedded linux operating system to the target robot hardware platform, cut and optimize this linux system. Including modify and construct uboot, linux kernel, root file system and other hardware device driver. On the base of above, we transplant and analyze the open source video server software mjpg-streamer, including video capture process based on V4L2 interface, video encoding and JPEG compression process, wireless transfer process based on socket. According to the characteristics of the processor S5PV210, we replace with hardware compression data instead of software in the source code. It effectively improves the system’s compression performance. And finally, we develop robot control software running on PC by using Qt, embedded server software by using Qt/Embedded, conrol software running on Android and lower computer microcontroller program, adapting to the system architecture, we designe custom communications protocol based on Modbus protocol at the user level.It has reached the anticipated design object through the test and analysis of the system.
Keywords: Embedded Linux, Mobile Robot, Visual Surveillance, Wireless Transmission, Sensor
移動(dòng)機器人的研究起始于二十世紀六十年代,涉及到自動(dòng)控制、電子電路設計、計算機編程、傳感器等眾多技術(shù),是多種技術(shù)交叉綜合的研究領(lǐng)域[1]。隨著(zhù)科學(xué)技術(shù)的發(fā)展,與機器人相關(guān)的技術(shù)研究已成為當前較活躍的研究領(lǐng)域,特別是物聯(lián)網(wǎng)技術(shù)和移動(dòng)互聯(lián)網(wǎng)技術(shù)的興起,將機器人技術(shù)與網(wǎng)絡(luò )控制技術(shù)相融合,已成為機器人研究發(fā)展的一個(gè)新趨勢[2-3]。此外隨著(zhù)控制技術(shù)智能化的深入發(fā)展,機器人能夠代替人類(lèi)從事危險性較高,技術(shù)難度大的工作,同時(shí)隨著(zhù)運行操作系統的智能手持移動(dòng)設備的大量使用,豐富了人們生活,也為移動(dòng)機器人控制終端提供了新的方案[4-5]。
嵌入式系統是“以應用為中心、以計算機技術(shù)為基礎、軟件硬件可裁剪、適應應用系統對功能、可靠性、成本、體積、功耗嚴格要求的專(zhuān)用計算機系統[6]”。嵌入式系統因其內核小,專(zhuān)用性強,軟件系統和硬件系統結合緊密,系統精簡(jiǎn),高實(shí)時(shí)性,低功耗,低電壓,低價(jià)格等優(yōu)勢,具有廣泛的應用領(lǐng)域[7]。嵌入式技術(shù)提供了一種靈活、高效和高性?xún)r(jià)比的解決方案,全球嵌入式處理器的產(chǎn)量是 PC 通用處理器的近 10 倍,其性能也越來(lái)越接近通用處理器。嵌入式技術(shù)的進(jìn)步與發(fā)展也推動(dòng)了機器人領(lǐng)域的革新,不斷提升的微處理器性能使得一些復雜的智能算法獲得更好的執行效率。將嵌入式技術(shù)應用到機器人控制中已是機器人發(fā)展的必然趨勢[8-10]。
互聯(lián)網(wǎng)技術(shù)的出現豐富了人類(lèi)的生活,也拉近了人與人、人與物之間的距離[11]。隨著(zhù)智能手機的普及,3G、4G 時(shí)代的到來(lái)和各種 APP 應用的推出,互聯(lián)網(wǎng)已經(jīng)從桌面 PC 走向智能手機及其他移動(dòng)設備,產(chǎn)生了移動(dòng)互聯(lián)網(wǎng)技術(shù)。移動(dòng)互聯(lián)網(wǎng)正加速融合到有線(xiàn)互聯(lián)網(wǎng)中。移動(dòng)互聯(lián)網(wǎng)能夠滿(mǎn)足上下班途中、外出旅行時(shí)間、等候時(shí)間及戶(hù)外休閑娛樂(lè )時(shí)間便捷享受互聯(lián)網(wǎng)的服務(wù),給人們的工作和生活帶來(lái)了極大便利[12]。移動(dòng)互聯(lián)網(wǎng)接入方便、網(wǎng)速提升以及智能手機、平板電腦等移動(dòng)智能設備大量普及和使用,為機器人網(wǎng)絡(luò )控制、遠程控制奠定了基礎,也使控制終端變得靈活方便,克服了傳統基于 PC 的控制終端固定、體積龐大等缺點(diǎn)[13]。
移動(dòng)監控機器人是具有視頻監控和環(huán)境感知能力,并能夠自由靈活移動(dòng)的智能化系統。可以提供防盜監控、病況監視、家電控制、休閑娛樂(lè )、兒童早教等服務(wù)。不但可以用于智能樓宇、倉庫、家居等一般場(chǎng)合,同時(shí)在危險或惡劣的氣候環(huán)境中,如存在放射性物體、爆炸性物體、有毒有害氣體等情況下,移動(dòng)監控機器人可以代替操作人員完成特定工作,進(jìn)行視頻圖像和環(huán)境參數的采集及無(wú)線(xiàn)傳輸,直觀(guān)清楚的掌握現場(chǎng)環(huán)境狀況,為相關(guān)人員做出正確的判斷提供重要的依據[14]。本課題研究正是在機器人控制技術(shù)、嵌入式技術(shù)、移動(dòng)互聯(lián)網(wǎng)技術(shù)相互融合、相互促進(jìn)的大環(huán)境下展開(kāi)的,基于嵌入式 Linux 的移動(dòng)監控機器人相關(guān)的研究已成為機器人研究的熱點(diǎn)方向之一,具有重要的實(shí)際意義和廣泛的應用前景。
移動(dòng)監控機器人屬于機器人家族中重要的一員,一直以來(lái)都備受各國科學(xué)家的高度重視,其發(fā)展程度體現了該國的科技實(shí)力。在國內外都對移動(dòng)監控機器人技術(shù)進(jìn)行了深入的研究,取得了理論的突破和技術(shù)的創(chuàng )新,同時(shí)這些研究成果已經(jīng)被成功的應用到了人類(lèi)生活的各個(gè)方面,極大的影響和改變了人類(lèi)的生活方式[15-17]。
在國外移動(dòng)監控機器人相關(guān)的研究起步相對較早,技術(shù)也比較成熟。最早的機器人技術(shù)研究開(kāi)始于 60 年代末,斯坦福研究院研制出第一臺移動(dòng)監控機器人,開(kāi)啟了機器人研究的序幕。這款機器人可以應用到各種復雜的環(huán)境中,具有傳感器數據采集和視頻數據采集功能,還涉及多信息處理和路徑規劃等問(wèn)題[18]。進(jìn)入 80 年代中期以后,互聯(lián)網(wǎng)技術(shù)的發(fā)展,將網(wǎng)絡(luò )技術(shù)應用的機器人控制當中,實(shí)現遠程網(wǎng)絡(luò )控制成為熱潮。Ken Goldberg 等人首先提出了一種通過(guò) Internet 遠程訪(fǎng)問(wèn)并控制移動(dòng)機器人的方法[19]。到 90 年代后,機器人技術(shù)逐漸走向成熟,出現了各種服務(wù)型機器人、工業(yè)機器人、軍用機器人等,機器人開(kāi)始應用到工業(yè)生產(chǎn)和日常生活中[20-21],極大的提高了人類(lèi)生產(chǎn)效率和生活質(zhì)量。到近年來(lái)隨著(zhù)技術(shù)進(jìn)一步的飛速發(fā)展,出現了智能化程度更高、功能更強大、運動(dòng)更加靈活的機器人,例如火星探測車(chē)、無(wú)人飛機、仿人型機器人、智能假肢等[22]。
移動(dòng)監控機器人系統測試:
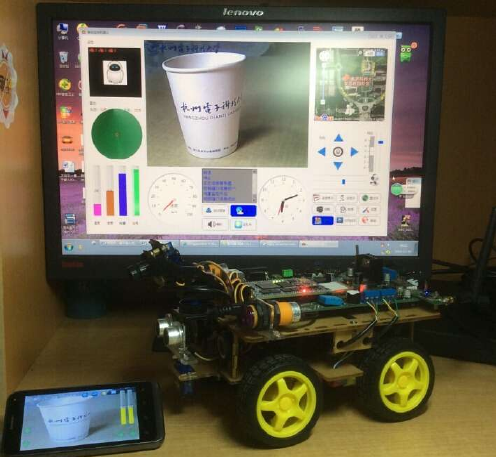
移動(dòng)監控機器人實(shí)物
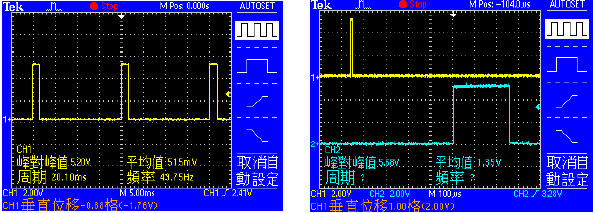
舵機控制信號與超聲波控制信號

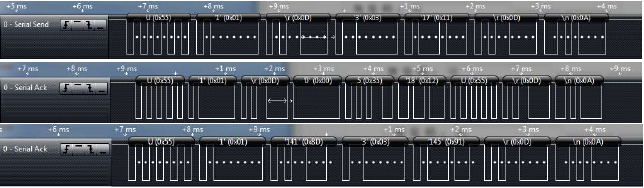
DHT11 溫度度傳感器輸出時(shí)序波形

串口調試助手

前進(jìn)命令發(fā)送和應答測試
獲取姿態(tài)命令正常和異常測試

系統視頻傳輸延時(shí)測試
目 錄
摘 要
ABSTRACT
目 錄
第一章 緒論
1.1 課題研究背景及意義
1.2 國內外研究現狀及發(fā)展趨勢
1.2.1 國外研究現狀
1.2.2 國內研究現狀
1.3 課題研究?jì)热菁罢撐恼鹿澃才?br />
第二章 系統總體方案設計
2.1 移動(dòng)監控機器人設計目標
2.2 機器人硬件方案對比分析
2.3 機器人軟件通信模型
2.3.1 C/S 模型
2.3.2 B/S 模型
2.4 機器人網(wǎng)絡(luò )控制拓撲結構
2.4.1 局域網(wǎng)控制
2.4.2 遠程控制
2.5 移動(dòng)監控機器人系統開(kāi)發(fā)流程
第三章 系統硬件平臺搭建
3.1 嵌入式服務(wù)器硬件電路設計
3.1.1ARM 服務(wù)器核心硬件電路設計
3.1.2 USB 攝像頭簡(jiǎn)介及選型
3.1.3 USB 無(wú)線(xiàn)網(wǎng)卡選型
3.1.4 LCD 及觸摸屏選型
3.1.5 GPS 模塊選型
3.2 單片機控制器硬件電路設計
3.2.1 單片機主控制器
3.2.2 直流電機驅動(dòng)電路
3.2.3 傾角傳感器
3.2.4 溫濕度傳感器
3.2.5 超聲波傳感器
3.2.6 攝像頭云臺舵機
3.2.7 蜂鳴器和 LED 驅動(dòng)
3.3 系統電源設計
3.4 底盤(pán)和直流電機
3.5 本章小結
第四章 嵌入式 LINUX 系統構建
4.1 S5PV210 啟動(dòng)流程
4.2 BOOTLOADER 移植
4.2.1 BOOTLOADER 簡(jiǎn)介
4.2.2 BOOTLOADER 移植
4.3 嵌入式 LINUX 內核移植
4.4 根文件系統構建
4.4.1 根文件系統概述
4.4.2 根文件系統構建
4.5 USB 無(wú)線(xiàn)網(wǎng)卡和攝像頭驅動(dòng)移植
4.5.1 USB 無(wú)線(xiàn)網(wǎng)卡驅動(dòng)程序移植
4.5.2 USB 攝像頭驅動(dòng)配置
4.6 本章小結
第五章 基于 MJPG-STREAMER 的視頻服務(wù)器
5.1 MJPG-STREAMER 概述
5.1.1 MJPG-STREAMER 簡(jiǎn)介
5.1.2 MJPG-STREAMER 運行流程
5.2 基于 V4L2 接口的視頻采集
5.3 圖像格式轉換與視頻壓縮
5.3.1 圖像格式轉換
5.3.2 JPEG 壓縮編碼原理
5.3.3 MJPG-STREAMER JPEG 壓縮實(shí)現
5.4 視頻數據的網(wǎng)絡(luò )傳輸
5.4.1 LINUX 網(wǎng)絡(luò )編程概述
5.4.2 MJPG-STREAMER 網(wǎng)絡(luò )傳輸流程
5.5 JPEG 硬件壓縮
5.6 本章小結
第六章 系統應用軟件設計
6.1 基于 QT 的 PC 控制終端軟件
6.1.1 QT 簡(jiǎn)介
6.1.2 QT 開(kāi)發(fā)環(huán)境的搭建
6.1.3 基于 QT 的 PC 控制終端軟件設計
6.2 基于 ANDROID 的移動(dòng)控制終端
6.2.1 ANDROID 開(kāi)發(fā)環(huán)境的搭建
6.2.2 ANDROID 控制終端軟件設計
6.3 基于 QT/EMBEDDED 的嵌入式服務(wù)器軟件設計
6.4 下位機控制軟件設計
6.5 控制通信協(xié)議設計
6.5.1 MODBUS 協(xié)議介紹
6.5.2 通信協(xié)議設計
6.6 本章小結
第七章 系統測試和總結
7.1 系統硬件測試
7.2 系統軟件測試
7.3 系統通信協(xié)議和實(shí)時(shí)性測試
7.4 工作總結
7.5 課題展望
致 謝
參考文獻
附錄
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)