24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘 要
近年來(lái),四旋翼飛行器技術(shù)及應用呈井噴式發(fā)展,因其成本低廉、機動(dòng)靈活、維護方便等特點(diǎn),被廣泛應用于軍事和商業(yè)民用領(lǐng)域。四旋翼飛行器技術(shù)涉及了電子通信、材料、控制等眾多技術(shù)領(lǐng)域。本文在綜述了四旋翼飛行器的發(fā)展現狀、發(fā)展趨勢及關(guān)鍵技術(shù)的基礎上重點(diǎn)研究了四旋翼飛行器的動(dòng)力學(xué)建模、姿態(tài)解算算法和姿態(tài)控制算法,并通過(guò)控制系統仿真實(shí)驗驗證了所設計算法的有效性。最后從硬件與軟件設計兩方面入手設計了飛行實(shí)驗平臺用以驗證算法的有效性和實(shí)用性。本文主要研究?jì)热菖c成果包括:
首先,基于四旋翼飛行器飛行原理對飛行器所受合外力及力矩進(jìn)行理論分析,在雙坐標系下根據牛頓-歐拉方程建立四旋翼飛行器動(dòng)力學(xué)模型。
其次,基于動(dòng)力學(xué)模型設計了姿態(tài)解算算法及控制算法,并在 MATLAB\simulink仿真環(huán)境中建立控制系統仿真模型以驗證算法。先對傳感器測量數進(jìn)行初步的濾波處理以獲得較為準確的傳感器測量數據;再經(jīng)過(guò)互補融合校正,得到精確的陀螺儀數據,采用一階龍格-庫塔法求解微分方程得到當前機體精確的姿態(tài)信息。接著(zhù)采用雙閉環(huán)串級PID控 制算法對系統的內環(huán)(姿態(tài)環(huán))和外環(huán)(位置環(huán))控制器進(jìn)行設計。控制器輸出各電機控制信號對電機轉速進(jìn)行調節實(shí)現對飛行器姿態(tài)及位置的控制。
最后,基于 STM32 微型處理器從硬件與軟件兩方面入手設計制作了四旋翼飛行器原型機作為飛行實(shí)驗平臺,用于在前期獲得建立仿真模型的各項參數以及后期對控制算法進(jìn)行實(shí)際飛行測試實(shí)驗。從理論和實(shí)際兩個(gè)方面來(lái)全面驗證算法的有效性和實(shí)用性。
仿真實(shí)驗結果顯示:所設計控制器對目標信號有很好的跟蹤效果,并且最終能夠準確到達目標位置并保持姿態(tài)穩定;在進(jìn)一步的實(shí)際飛行平臺測試結果表明:姿態(tài)解算算法能很好的改善數據的精確程度,而且雙閉環(huán)串級 PID 控制器也具有良好的綜合性能。
關(guān)鍵詞:四旋翼飛行器;建模;四元數互補濾波;雙閉環(huán)串級 PID 控制;仿真
Abstract
In recent years, the technology and application of Quad-rotor aircraft show blowout development, its low cost, flexible and convenient maintenance make it widely used in military and commercial civil fields.The technology of Quad-rotor aircraft relates to many technical fields such as electronic communication, material and control.In this paper, firstly I summarized the development status, development trend and key technology of Quad-rotor aircraft, then emphatically researched the dynamic modeling, attitude calculation algorithm and attitude control algorithm, and the validity of the proposed algorithm is verified by the simulation experiment of the control system.Finally, from the hardware and software design, the flight experiment platform is designed to validate the validity and practicability of the algorithm. The main contents and achievements of this dissertation include:
Firstly, based on the principle of the Quad-rotor flight vehicle, the force and torque of the aircraft are analyzed theoretically, and the kinetic model of the Quad-rotor aircraft is established under the Newton-Euler equation in two coordinates.
Secondly, the attitude algorithm and control algorithm are designed based on dynamic model, and the control system simulation model is established to validate the algorithm in the MATLAB\simulink simulation environment.Firstly, the sensor measurements are filtered to obtain more accurate sensor data. Then via the complementary fusion correction, the precise gyro data is obtained, and the first order Runge-Kutta method is used to obtain the precise attitude information of the current organism. And then a double closed loop cascade PID control algorithm is used to design the inner loop (posture ring) and the outer ring (position Ring) controller.The controller outputs the motor control signals to regulate the motor speed and control the attitude and position of the Quad-rotor.
Finally, based on the STM32 Micro processor, the prototype of the Quad-rotor aircraft is designed as a flight experiment platform from both hardware and software,which is used to obtain the parameters of the simulation model and the actual flight test experiment of the control algorithm in the early stage.The validity and practicability of the algorithm are verified in both theory and practice.
Simulation results show:The Designed controller has good tracking effect on the target signal, and can finally reach the target position accurately and maintain the posture stability;In further actual flight platforms test results show:attitude calculation algorithm can improve the accuracy of data, and double closed loop cascade PID controllers have good comprehensive performance.
Keywords:Quad-rotor aircraft;Setup pattern;quaternion Complementary filtering;Double closed loop Cascade PID Control;simulation
四旋翼飛行器具有結構簡(jiǎn)單、靈活性好、故障率低、制造及維護成本低廉等優(yōu)點(diǎn)。其最初研究目的是基于軍事方面的需求。因其在多次局部戰爭中的卓越表現,逐漸得到各國重視遂對其展開(kāi)研究。隨著(zhù) EDA、通信及先進(jìn)材料等技術(shù)的迅猛發(fā)展,四翼飛行器技術(shù)的發(fā)展有了質(zhì)的飛躍。近年來(lái),四旋翼飛行器不僅在外部造形上更加個(gè)性獨特,而且其性能也越發(fā)先進(jìn)。從開(kāi)始的通過(guò)手動(dòng)遙控操作到 GPS 自動(dòng)導航飛行、定高巡航,到如今的自動(dòng)避障與全天候自主路徑規劃飛行甚至通過(guò)人的大腦來(lái)控制飛行器[1]。
四旋翼飛行器優(yōu)異的性能致使其應用范圍越來(lái)越廣。在軍用方面,用于完成戰場(chǎng)偵察和監視、定位校射、戰場(chǎng)毀傷評估、電子破壞打擊等,也可作為靶機用于火炮、導彈的靶標;在民用方面,目前有警用(交通路況)、城市管理(規劃建設)、農業(yè)(植保)、地質(zhì)(遙感航拍圖片)、電力(線(xiàn)路巡檢)、搶險救災、電影拍攝等行業(yè)應用[2]。對四旋翼飛行器技術(shù)的研究涉及的學(xué)科、領(lǐng)域相對較廣,可以為控制理論、傳感檢測以及計算機通信技術(shù)等諸領(lǐng)域的融合研究提供一個(gè)相對較好的平臺。所以本課題在理論與實(shí)際應用中都相當具有研究意義。
慣性導航技術(shù)是利用測量元件測出載體運動(dòng)的線(xiàn)加速度和角速度,經(jīng)過(guò)數據融合得出當前載體的姿態(tài)導航信息。四旋翼飛行器的姿態(tài)檢測技術(shù)屬于慣性導航技術(shù)的一種。
慣性導航系統是多傳感器組合而成的系統,其技術(shù)核心是姿態(tài)解算算法與各傳感器數據濾波融合算法的設計。常用的姿態(tài)解算算法有:歐拉角法、方向余弦法、四元數法等。歐拉角法比較直觀(guān),但在解方程時(shí)存在奇點(diǎn)現象;方向余弦法雖然避免了奇點(diǎn)的問(wèn)題,但需要解的微分方程比較多,造成計算量較大的問(wèn)題;四元數法雖然存在不可交換性誤差的問(wèn)題,但是它計算量小且結果相對精確。所以在實(shí)際中應用比較廣泛[16]。常用的數據融合算法有:梯度下降、擴展卡爾曼濾波、互補濾波等算法[17]。
梯度下降算法是一種迭代求極值的方法,也就是求一個(gè)多維的導數(梯度)作為函數值增加的方向,按步長(cháng)逐漸逼近目標值。同理,逆向逐步減小函數值即可求出函數的極小值。該方法精確度較高但步長(cháng)較難確定,步長(cháng)太大數據會(huì )出現波動(dòng),步長(cháng)太小則收斂較慢[18]。
擴展卡爾曼濾波算法是一種適用于近似線(xiàn)性化、高斯環(huán)境的算法,其基本思想是利用前一時(shí)刻估計值和現時(shí)刻的觀(guān)測值來(lái)更新?tīng)顟B(tài)變量的估計值,從而得出當前時(shí)刻的估計值。計算流程為:圍繞狀態(tài)估值對非線(xiàn)性模型進(jìn)行一階 Taylor 展開(kāi),然后先根據初始估計值計算協(xié)方差,根據得出的協(xié)方差推進(jìn)狀態(tài)變量估計,接著(zhù)計算卡爾曼增益,再由觀(guān)測數據更新估計值。由增益和新的估計值計算出新的協(xié)方差,接著(zhù)更新變量,依次循環(huán)最終得到精確的最估計值。經(jīng)實(shí)際驗證,擴展卡爾曼濾波算法能精確融合數據且具有實(shí)時(shí)性強、穩定性高等優(yōu)點(diǎn)。但容易出現發(fā)散問(wèn)題,對初始狀態(tài)值不好確定且對硬件要求相對較高[19];互補濾波算法利用頻率來(lái)分辨和消除噪聲,其原理是利用加速度計與磁力計的校正誤差來(lái)補償陀螺儀的漂移誤差。互補濾波算法原理相對簡(jiǎn)單,對慣性測量器件精度要求相對較低,適合低成本航姿測量系統的應用[20]。
本文主要目的是研究并設計出適用于微型四翼飛行器的飛行控制系統,保證飛行器能平穩飛行行且擁有快速的姿態(tài)反應控制能力和姿態(tài)靈活的飛行性能。對此,本文主要的工作如下:
1、研究四軸飛行器的飛行原理并建立起飛行器的動(dòng)力學(xué)模型。
2、設計四翼飛行器的姿態(tài)解算方法,在精確解算姿態(tài)的前提下采用雙閉環(huán)串級PID 控制算法對機體姿態(tài)進(jìn)行控制。并在 MATLAB\simulink 環(huán)境中對已有模型進(jìn)行仿真研究,然后將研究結果應用于實(shí)際控制。
3、研究 STM32fl03RBT6 芯片、傳感測量模塊的工作接口原理,從硬件和軟件兩方面設計實(shí)物飛行實(shí)驗平臺以獲取仿真參數。然后將仿真確定的 PID 參數應用到飛行實(shí)驗平臺的實(shí)際控制器中,并在線(xiàn)微調,實(shí)現了飛行器的實(shí)時(shí)快速響應,驗證了算法和方案的有效性和實(shí)用性。
四旋翼飛行器控制系統總體設計:
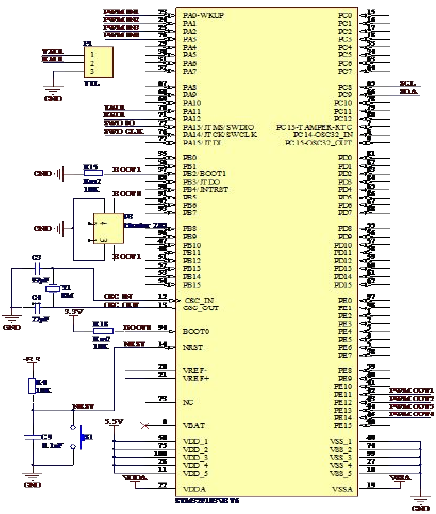
STM32 最小系統

MPU6050 模塊實(shí)物(a)、接口電路圖(b)

HMC5883L 硬件接線(xiàn)電路圖

飛控板實(shí)物圖

電機和槳葉(a)、電調(b)

遙控(a)和接收機(b)

上位機顯示界面

花牌 11.1V 2200mah 3S 鋰電池組

四旋翼飛行器飛行實(shí)驗平臺

實(shí)際飛行測試
目 錄
摘 要
Abstract
1 緒論
1.1 選題背景及研究意義
1.2 國內外發(fā)展歷史與現狀
1.3 四旋翼飛行器控制系統關(guān)鍵技術(shù)
1.3.1 姿態(tài)檢測(慣性導航)技術(shù)
1.3.2 四旋翼飛行器的控制方法
1.4 本文主要工作
2 四旋翼飛行器動(dòng)力學(xué)模型的建立
2.1 四旋翼飛行器飛行原理
2.2 坐標系的建立及姿態(tài)描述
2.2.1、坐標系的建立
2.2.2 飛行器飛行位置姿態(tài)描述
2.3 四旋翼飛行器運動(dòng)學(xué)模型的建立
2.4 小結
3 飛行器的姿態(tài)解算及控制器設計
3.1 基于四元數互補濾波的姿態(tài)檢測算法
3.1.1 傳感器數據的濾波
3.1.2 傳感器數據的融合校正
3.1.3 姿態(tài)數據的更新
3.2 控制器設計
3.2.1 PID 控制原理
3.2.2 基于簡(jiǎn)化模型的雙閉環(huán)串級 PID 控制算法
3.3 飛行器控制系統的仿真研究
3.3.1 控制系統仿真模型搭建
3.3.2 仿真實(shí)驗與結果分析
3.4 小結
4 四旋翼飛行器飛行平臺總體設計
4.1 飛行系統硬件設計
4.1.1 飛行控制器 MCU 設計
4.1.2 傳感測量模塊
4.1.3 電調驅動(dòng)模塊
4.1.4 無(wú)線(xiàn)通信模塊
4.1.5 電源模塊
4.1.6 整體飛行實(shí)驗平臺
4.2 飛行系統軟件設計
4.2.1 數據采集及姿態(tài)解算程序設計
4.2.2 遙控信號輸入及電機調速信號輸出程序設計
4.3 實(shí)驗平臺飛行測試
4.4 小結
5 結論與展望
5.1 結論
5.2 未來(lái)研究工作展望
參考文獻
附錄
攻讀學(xué)位期間研究成果
致 謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)