24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要:針對智能車(chē)的控制系統, 選用STC89C52作為整個(gè)系統的主控芯片, 并進(jìn)行硬件電路設計;以NREF24L01作為無(wú)線(xiàn)接收模塊, 選取E18-D80NK-N紅外光電傳感器作為避障模塊的核心器件;并用Proteus軟件進(jìn)行電路的模擬和仿真, 結果表明可行。以STM32103C8為核心, 設計了智能小車(chē)的實(shí)時(shí)監控系統, 并制定了系統軟件的設計方案;在系統軟件方案的基礎上提出基于NRF24L01的SPI通信、串口通信和電機的PWM調速方案。最終與基于VB的遙控器進(jìn)行聯(lián)合調試, 通過(guò)示波器、LED指示燈簡(jiǎn)易監控觀(guān)察智能車(chē)的運行狀態(tài)。結果表明:系統能很好地執行小車(chē)的前進(jìn)、后退、轉向、避障等功能, 達到預期設想, 有良好的使用效果和廣闊的市場(chǎng)前景。
關(guān)鍵詞:智能車(chē); NRF24L01; SPI通信; PWM;
Abstract:Aiming at the intelligent vehicle control system, STC89 C52 was used as the main control chip of the whole system, and the hardware circuit was designed. NREF24 L01 was used as the wireless receiving module, E18-D80 NK-N was selected as the core device of infrared photoelectric sensor obstacle avoidance module, and the circuit simulation was carried out with Proteus software, the results show it is feasible. With STM32103 C8 as the core, this paper designed a real-time monitoring system of intelligent vehicle, and the scheme of system software was designed. The PWM control scheme of NRF24 L01 SPI communication, serial communication and motor was based on software solution. With remote control based on VB joint debugging, running state was monitored through the oscilloscope, LED lights, simple observation of intelligent vehicle monitoring. the results show that the system can perform well moving forward and backward, steering, obstacle avoidance and other functions, meeting expectations and having good effect and broad market prospect.
Keyword:intelligent vehicle; NRF24L01; serial peripheral interface; PWM;
智能車(chē)作為一種輪式的移動(dòng)機器人[1-2], 是一個(gè)集環(huán)境感知、動(dòng)態(tài)決策與規劃、智能控制與執行等多功能于一體的綜合系統[3-4], 能應用到自動(dòng)控制、模式識別、傳感器技術(shù)、汽車(chē)電子、電氣、計算機、機械等多個(gè)領(lǐng)域, 是典型高新技術(shù)綜合體, 在導盲車(chē)輛、國防安全、工業(yè)生產(chǎn)等領(lǐng)域, 都有廣泛應用, 具有重要的軍用及民用價(jià)值[5-6]。
隨著(zhù)技術(shù)的發(fā)展, 對智能車(chē)輛的研究越來(lái)越深入[7-8]。通過(guò)在智能車(chē)上裝配各種傳感器和控制芯片來(lái)實(shí)現自主巡航等功能, 在完全沒(méi)有人工干預或只有部分人工干預的情況下, 沿著(zhù)預設的路徑行駛到達目的地[9-10]。要實(shí)現自主巡航功能, 智能車(chē)輛必須通過(guò)一些傳感器獲取自身的位置信息或者外部環(huán)境提供的引導信息, 所以對車(chē)輛智能化技術(shù)的研究開(kāi)發(fā)過(guò)程中, 智能車(chē)的控制系統和外部導航一直是研究的核心問(wèn)題[11-12]。針對智能車(chē)的控制問(wèn)題, 本文選用STC89C52作為主控芯片, 進(jìn)行控制系統研究, 完成了相應的硬件和軟件設計, 實(shí)現控制小車(chē)前進(jìn)、后退、轉向、避障等功能。
1、系統總體設計方案
系統總體設計框圖如圖1所示, 由電源模塊、電機模塊、無(wú)線(xiàn)模塊、避障模塊、單片機主控模塊和車(chē)體6部分組成。選用線(xiàn)性穩壓電源作為電源模塊。紅外傳感器電路簡(jiǎn)單, 檢測容易調節, 靈敏度高, 因此采用紅外避障進(jìn)行自動(dòng)避障功能的設計。采用達林頓管構成的H型PWM電路進(jìn)行調速。無(wú)線(xiàn)接收器采用數字信號傳輸。單片機選擇內存為8 K的STC89C52單片機。為了小車(chē)更好地走直線(xiàn), 選用4個(gè)驅動(dòng)輪的小車(chē)。
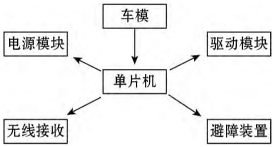
圖1 總體設計框圖
2、系統硬件電路設計
2.1、驅動(dòng)模塊的設計
本系統采用H橋電路驅動(dòng)電機, 采用L298N作為電機的驅動(dòng)芯片, 在每根輸出線(xiàn)上都加上2個(gè)二極管IN4007來(lái)保護芯片。根據L298N的驅動(dòng)原理設計的驅動(dòng)電路圖如圖2所示。
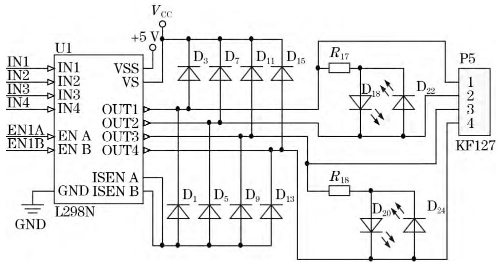
圖2 驅動(dòng)電路圖
2.2、無(wú)線(xiàn)模塊的設計
根據頻率覆蓋及模塊的有效收發(fā)距離, 選用NRF24L01。NRF24L01是工作在2.4~2.5 GHz頻段的單片無(wú)線(xiàn)收發(fā)器芯片。它具有速率高、體積小、性能穩定、價(jià)格低等優(yōu)點(diǎn)。
2.3、自主避障模塊的設計
本設計采用具有濾光片的光電管進(jìn)行電路設計。光電開(kāi)關(guān)是利用被檢測物對光束的遮擋或反射, 由同步回路選通電路, 從而檢測遮擋物體, 所有能反射光線(xiàn)的物體均可被檢測。光電開(kāi)關(guān)將輸入電流在發(fā)射器上轉換為光信號射出, 接收器再根據接收到的光線(xiàn)的強弱或有無(wú)對目標物體進(jìn)行檢測。
2.4、電源模塊的設計
電源電路負責系統中各個(gè)器件的電壓分配, 電源電壓分配如圖3所示。由圖3可知, 系統電源輸入應能提供或轉換為5 V和3.3 V電壓, 5 V電壓供給單片機、驅動(dòng)模塊、避障模塊;3.3 V電壓供給無(wú)線(xiàn)模塊。
2.5、簡(jiǎn)易實(shí)時(shí)監測系統
為了實(shí)時(shí)監測小車(chē)的運動(dòng)狀態(tài), 需要對來(lái)自小車(chē)的反饋信息構建一個(gè)監控系統。為了提高系統的實(shí)時(shí)性, 本設計采用STM32103C8單片機專(zhuān)門(mén)控制反饋信息的發(fā)送, 其最高工作頻率可達72 MHz。為了能夠更快地處理小車(chē)的反饋信息, 將接收反饋系統的主控芯片也同樣換成STM32103C8芯片。監控系統的硬件設計框圖如圖4所示。
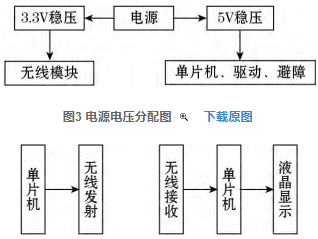
圖4 監控系統的硬件設計框圖
3、電路模擬及仿真
為了驗證設計的電路正確與否, 采用Proteus軟件對無(wú)線(xiàn)接收以及電機驅動(dòng)進(jìn)行模擬仿真, 如圖5所示。
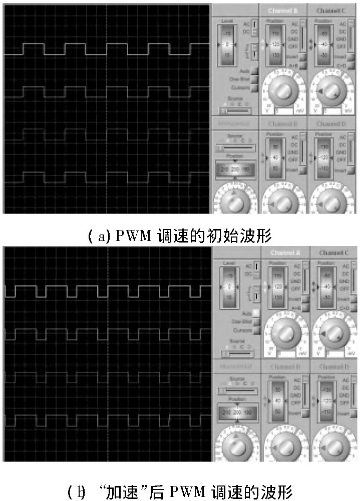
圖5 電機驅動(dòng)仿真圖
通過(guò)觀(guān)察指示燈來(lái)判斷電機是否正常工作。通過(guò)示波器觀(guān)察加速、減速按鍵的PWM調速波形的占空比來(lái)判斷是否模擬成功。
(1) 在沒(méi)有按下“加速”、“減速”按鍵時(shí)通過(guò)示波器觀(guān)察L298N的使能端如圖5 (a) 所示。
(2) 當按下“加速”按鍵時(shí), 通過(guò)示波器觀(guān)察L298N的使能端如圖5 (b) 所示。
(3) 當按下“減速”按鍵時(shí), 通過(guò)示波器觀(guān)察L298N的使能端如圖5 (c) 所示。
圖5 (b) 比圖5 (a) 的占空比大, 說(shuō)明加速功能模擬成功。圖5 (c) 比圖5 (b) 占空比小說(shuō)明減速功能模擬成功。從模擬電路的仿真結果可見(jiàn)本文電路設計合理。
4、系統軟件設計
NRF24L01采用的是SPI通信, 采用軟件模擬SPI接口來(lái)實(shí)現單片機和無(wú)線(xiàn)模塊的通信。將IRQ引腳連接到單片機的中斷引腳上, 這樣能避免用多個(gè)if語(yǔ)句來(lái)判斷是否接收到數據而帶來(lái)的延時(shí), 從性能上來(lái)說(shuō)提高小車(chē)控制的實(shí)時(shí)性。
本系統采用PWM的方式調速, 采用軟件模擬的方式產(chǎn)生PWM信號來(lái)調節車(chē)速。車(chē)速的調節主要是通過(guò)改變PWM的占空比來(lái)實(shí)現, 因此用軟件模擬必須用到單片機中的定時(shí)器。程序流程圖如圖6所示。
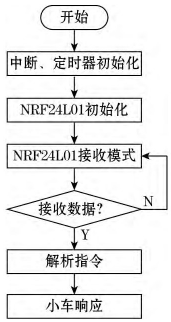
圖6 程序流程圖
5、系統調試
系統的硬件測試平臺包括無(wú)線(xiàn)模塊、自主避障模塊、電機驅動(dòng)模塊和單片機核心模塊。
5.1、小車(chē)系統調試
5.1.1、示波器調試
示波器調試如圖7所示。
(1) 當按下遙控器電源開(kāi)關(guān)、不接通無(wú)線(xiàn)接收模塊的電源時(shí), 觀(guān)察無(wú)線(xiàn)遙控器IRQ的引腳時(shí), 波形圖為圖7 (a) 。
(2) 只接通無(wú)線(xiàn)接收模塊的電源時(shí), 觀(guān)察到接收模塊的IRQ引腳波形為圖7 (b) 所示。
(3) 當同時(shí)接通無(wú)線(xiàn)發(fā)射和接收模塊, 并按下遙控器上相應的按鍵時(shí), 無(wú)線(xiàn)發(fā)射和接收的IRQ波形如圖7 (c) 、圖7 (d) 所示。比較圖7 (a) 和圖7 (c) 可見(jiàn), 在圖7 (c) 中產(chǎn)生一個(gè)5 ms的低電平, 說(shuō)明接收到來(lái)自接收模塊自應答信號, 發(fā)射數據成功;比較圖7 (b) 和圖7 (d) 可見(jiàn), 在無(wú)線(xiàn)接收模塊IRQ的引腳產(chǎn)生一個(gè)100 ms的低電平, 說(shuō)明接收數據成功。
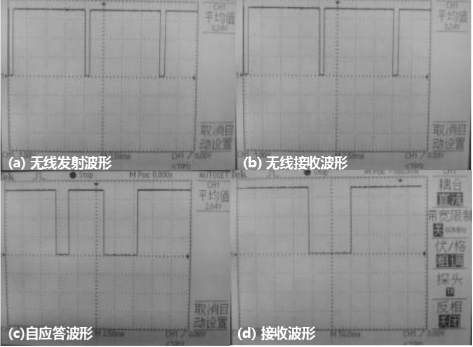
圖7 示波器調試圖
5.1.2、LED調試
通過(guò)LED指示燈的工作狀態(tài)判斷接收到數據的正確與否。為能夠更加準確地判斷出接收數據的正確與否, 制定了接收數據和LED工作狀態(tài)的對照表, 見(jiàn)表1。
表1 接收數據和LED工作狀態(tài)對照表
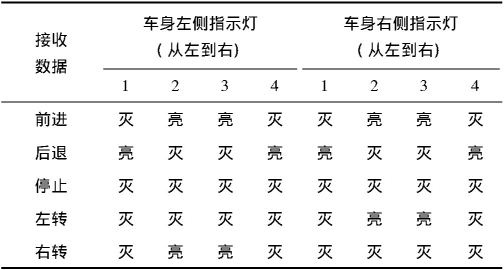
為了判斷接收數據的正確與否, 分別對“前進(jìn)”、“后退”、“停止”、“左轉”和“右轉”按鍵進(jìn)行檢驗。當打開(kāi)電源開(kāi)關(guān), 分別按下遙控器的相應按鍵檢查小車(chē)上的指示燈是否和遙控器按鍵一致, 如果一致就證明接收數據無(wú)誤, 沒(méi)有丟包現象。
5.1.3、實(shí)時(shí)簡(jiǎn)易監控系統
當分別按下“前進(jìn)”、“后退”、“停止”并遇到障礙物時(shí)監控系統的顯示器輸出如圖8所示。
從圖8可看出小車(chē)反饋回來(lái)的信息驗證了整個(gè)系統的穩定性能良好, 小車(chē)能很好地執行遙控器發(fā)出的控制命令, 整個(gè)系統的實(shí)時(shí)性、穩定性良好。
5.2、聯(lián)合調試
聯(lián)合調試方案主要從3方面驗證全系統:發(fā)射/接收數據是否正確、執行指令是否正確、反饋信息是否正確。聯(lián)合調試系統主要由LED指示燈、遙控器、液晶顯示器、小車(chē)等組成。通過(guò)LED指示燈工作狀態(tài)判斷接收的數據是否正確, 通過(guò)小車(chē)的運動(dòng)情況判斷指令執行是否正確, 通過(guò)監控顯示器來(lái)判斷小車(chē)反饋信息是否正確。相應的實(shí)驗表明發(fā)射/接收數據、執行指令和反饋信息正確, 全系統工作正常, 小車(chē)能在遙控器的控制下進(jìn)行相應的動(dòng)作。
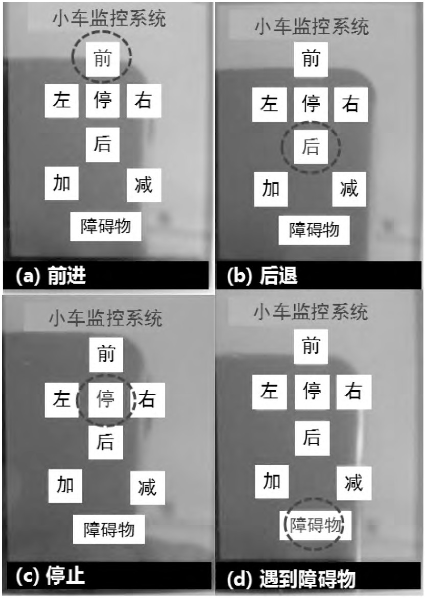
圖8 實(shí)時(shí)簡(jiǎn)易監控系統
6、結論
本系統以STC89C52為核心, 利用STC89C52內部有限的資源實(shí)現小車(chē)的無(wú)線(xiàn)控制, 同時(shí)在設計的初期考慮到STC89C52的工作速率較慢, 在實(shí)時(shí)性方面采取了相應的措施。為能更好地檢測小車(chē)的運動(dòng)狀態(tài), 設計了基于STM32的智能小車(chē)反饋系統, 實(shí)時(shí)檢測小車(chē)的運動(dòng)狀態(tài)。經(jīng)測試各項功能都能正常實(shí)現, 可靠性強, 達到預期的目標, 具有非常廣泛的應用前景。
參考文獻
[1]鮑慶勇, 李舜酩, 沈垣, 等.自主移動(dòng)機器人局部路徑規劃綜述[J].傳感器與微系統, 2009, 28 (9) :1-4.
[2]BISHOP R.Intelligent vehicle applications worldwide[J].IEEE Intelligent Systems and Their Applications, 2000, 15 (1) :78-81.
[3]張紅濤, 趙書(shū)尚, 韓建海.基于CMOS傳感器的智能小車(chē)設計[J].河南科技大學(xué)學(xué)報, 2009, 30 (11) :18-20.
[4]鄔琦, 楊江濤.一種恒溫箱溫度控制系統的設計與實(shí)現[J].計算機測量與控制, 2014, 22 (8) :2455-2458.
[5]吳懷宇, 程磊, 章政.大學(xué)生智能汽車(chē)設計基礎與實(shí)踐[M].北京:電子工業(yè)出版社, 2008:35-40.
[6]王文偉, 畢榮華.電動(dòng)汽車(chē)技術(shù)基礎[M].北京:機械工業(yè)出版社, 2010:20-22.
[7]CHEN Q, OZGUNER U, REDMILL K.Developing a completely autono2mous vehicle[J].IEEE Intelligence Systems, 2004, 9 (5) :8-11.
[8]AUFRERE R, GOWDY J, MERTZ C, et al.Perception for collision avoidance and autonomous drivin[J].Mechatronics.2003, 13 (10) , 1149-1161.
[9]MARTIINE F J, TOH C K, CANO J C, et al.Emergency service in future intelligent transportation systems based on vehicular communication networks[J].IEEE Intelligent Transportation Systems Magazine, 2010, 2 (2) :6-20.
[10]鄔琦, 楊江濤, 馬喜宏.基于FPGA的高速信號采集電路的設計與實(shí)現[J].實(shí)驗室研究與探索, 2015, 34 (4) :124-128.
[11]徐友春, 章永進(jìn), 王肖, 等.智能車(chē)的研究現狀與發(fā)展趨勢[C].第六屆中國智能交通年會(huì )暨第七屆國際節能與新能源汽車(chē)創(chuàng )新發(fā)展論壇論文集, 2011:129-133.
[12]萬(wàn)柯, 張海燕.基于單片機和光電開(kāi)關(guān)的通用計數器設計[J].計算機測量與控制, 2015 (2) :608.