24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要:基于激光測距的車(chē)輛行駛跑偏二維參數的測量方法, 研究了其測試原理和總體結構方案, 分析了影響測試誤差的可能因素, 探討了減小測試誤差的方法.基于汽車(chē)下線(xiàn)在線(xiàn)檢測的實(shí)際需要進(jìn)行了系統硬件和軟件的設計, 開(kāi)發(fā)了一套基于二維參數的汽車(chē)行駛跑偏在線(xiàn)自動(dòng)測試系統.通過(guò)對測試方法的改進(jìn)及對測試數據的分層處理來(lái)減小測試誤差, 對測試點(diǎn)的邏輯控制來(lái)滿(mǎn)足工業(yè)測試現場(chǎng)對跑偏測試系統的高精度、高強度、高效率和多任務(wù)測試的需求.結果表明:該系統實(shí)現了利用非接觸式測量方式自動(dòng)、精確、快速地測量汽車(chē)行駛跑偏量, 系統測試誤差小于2 cm, 能滿(mǎn)足汽車(chē)制造企業(yè)對下線(xiàn)車(chē)輛行駛跑偏檢測的要求.
關(guān)鍵詞:汽車(chē); 跑偏; 激光測距; 二維參數; 在線(xiàn)檢測;
Abstract:The two-dimensional measuring method of vehicle driving wandering was proposed based on the laser ranging, and the testing principle and the general structure scheme were investigated. The possible influencing factors on testing error were analyzed, and the method for reducing testing error was discussed. Based on the actual need of online testing of offline vehicles, the system hardware and software were designed, and the online automatic testing system was developed. The test error was reduced by the improved test method and the hierarchical processing of test data, and the logical control of test points to the system was used to meet the demand of industrial test site with high precision, high strength, high efficiency and multi-task test. The results show that the system with non-contact measurement method can realize automatic, accurate and rapid measurement of vehicle driving wandering. The test error of the system is less than 2 cm, which can meet the requirements of automobile manufacturer's wandering detection.
Keyword:automobile; driving wandering; laser ranging; two-dimensional parameter; online testing;
維持汽車(chē)直線(xiàn)行駛是現代汽車(chē)的基本要求, 也是行車(chē)安全的重要保證.然而, 車(chē)輛在生產(chǎn)制造和裝配調整過(guò)程中不可避免地存在一定誤差, 因此從生產(chǎn)線(xiàn)下來(lái)的汽車(chē)總會(huì )有少部分存在行駛跑偏問(wèn)題[1-4].目前, 國內的部分汽車(chē)制造廠(chǎng)商已經(jīng)使用基于數字圖像的車(chē)輛行駛跑偏在線(xiàn)測量系統[3-4]來(lái)檢驗下線(xiàn)車(chē)輛的跑偏量, 其特點(diǎn)是設備結構比較復雜, 安裝、調試、標定、維護比較困難, 成本也較高.因此, 筆者基于激光測距的車(chē)輛行駛跑偏二維參數的測量方法, 研究其測試原理和總體結構方案, 分析影響測試誤差的可能因素, 探討減小測試誤差的方法.
1 、系統測試區硬件組成及布局
系統測試區的組成及布局如圖1所示, 測試區硬件主要包括設置在跑道左右兩側3個(gè)測點(diǎn)上的6個(gè)測試單元、3套對射式光電開(kāi)關(guān)、3個(gè)AP (無(wú)線(xiàn)信號接入點(diǎn)) 等組成.
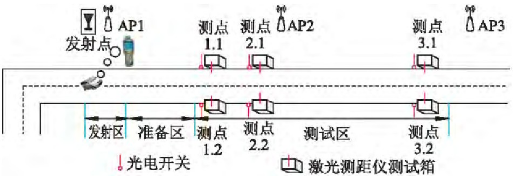
圖1 測試區硬件布局圖
2、二維參數測試原理及算法
2.1、測試二維坐標系的建立
系統初始安裝時(shí), 要對每組測點(diǎn)進(jìn)行激光測距儀位置校準, 使得每組測點(diǎn)的激光測距儀射出的激光在空間上能完全重合 (為了保證測試數據的一致性及準確性) .當激光測距儀位置固定后, 找出測試道路的中心線(xiàn)并以此為基準建立y坐標軸, 以測點(diǎn)1 (即第1組測點(diǎn)) 的2個(gè)激光測距儀發(fā)出的激光束向路面投影得到的線(xiàn)段為基準建立x坐標軸, 與道路中心線(xiàn)的交點(diǎn)為坐標原點(diǎn)建立二維測試坐標系[5].由于在實(shí)際工程應用及設備初始安裝過(guò)程中很難保證各部件之間的相對位置完全正確, 所以初始安裝完成后要對設備進(jìn)行標定, 測量出每組測點(diǎn)準確的坐標.測試原理如圖2所示, 記測點(diǎn)1.1 (第1組測點(diǎn)中靠近道路左側的測點(diǎn)) 坐標為 (-L1, 0) , 測點(diǎn)1.2 (第1組測點(diǎn)中靠近道路右側的測點(diǎn)) 坐標為 (L2, 0) ;測點(diǎn)2.1坐標為 (-L3, D1) , 測點(diǎn)2.2坐標為 (L4, D1) ;測點(diǎn)3.1坐標為 (-L5, D1+D2) ;測點(diǎn)3.2坐標為 (L6, D1+D2) .
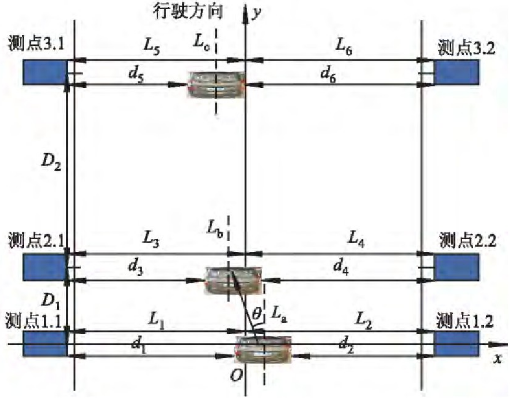
圖2 測試原理圖
2.2、測試原理及算法
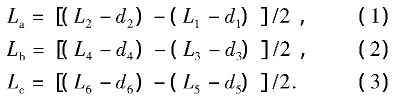
建立二維測試坐標系后, 當測試車(chē)輛依次通過(guò)各測點(diǎn)時(shí), 可以得到3組 (共6個(gè)) 距離值 (該距離值是通過(guò)采集卡采集到激光測距儀的電流數據并在程序中計算處理得到的) , 分別為d1, d2, d3, d4, d5, d6.以測試車(chē)輛沿y軸方向 (車(chē)輛前進(jìn)方向) 的車(chē)身中心線(xiàn)為準, 記其通過(guò)各測點(diǎn)時(shí)的坐標 (即二維參數坐標) 分別為V1 (La, 0) , V2 (Lb, D1) , V3 (Lc, D1+D2) .由圖2可知, 利用各組左右測點(diǎn)的測試數據可得測試車(chē)輛駛過(guò)各測點(diǎn)時(shí)的坐標為
在實(shí)際測試中, 車(chē)輛進(jìn)入測試區的測點(diǎn)時(shí), 總會(huì )與y軸方向有個(gè)夾角即駛入角, 記作θ.由D1≈5 m, 跑偏測試區車(chē)速限定為50~90 km·h-1, 則測試車(chē)輛由測點(diǎn)1駛入測點(diǎn)2所需時(shí)間為0.20~0.36 s.由于該時(shí)間很小, 可作假設:測試車(chē)輛由測點(diǎn)1駛入測點(diǎn)2時(shí), 其x軸上的位移是由該車(chē)輛進(jìn)入測點(diǎn)1時(shí)的駛入角所引起的, 而不考慮在這段短時(shí)間內車(chē)輛跑偏引起其x軸坐標的變化.由圖2可得

測試車(chē)輛進(jìn)入測點(diǎn)1時(shí)的駛入角為

易知排除掉駛入角對測試車(chē)輛跑偏量的影響, 可得其跑偏量為

3、測試精度影響因素及相應補償方法
系統測量精度主要與激光測距儀的測量精度以及數據采集與處理硬/軟件的精度有關(guān).需要采取一定的補償方法來(lái)保證測試的精度.
3.1、激光測距儀的測量精度分析
影響激光測距儀測量精度主要是其內部因素和外部因素.由于內部測量精度是由其自身內部測試單元及其相應結構來(lái)保證的, 因此要盡量減少影響其測量精度的外部因素.外部因素主要與被測物表面傾斜角度、被測物表面光澤和粗糙度、被測物表面顏色有關(guān)[6].由于下線(xiàn)車(chē)輛車(chē)身的顏色及表面光澤和粗糙度是固定的, 其對測量精度影響較小, 可以通過(guò)試驗標定進(jìn)行誤差補償, 故對這2個(gè)影響因素不作具體闡述.
在實(shí)際測量中被測物表面傾斜程度對測量精度的影響較大.被測物表面傾斜是指在光點(diǎn)處表面的法線(xiàn)方向與入射光的方向不重合, 其夾角稱(chēng)為傾斜角.隨著(zhù)被測物表面傾斜角的不同, 入射光點(diǎn)所產(chǎn)生的散射光空間分布將發(fā)生變化, 從而導致接收透鏡在單位立體角、單位時(shí)間內接收到的光能量發(fā)生變化, 這就導致測量值和實(shí)際值有一個(gè)偏差.這種誤差具有如下特點(diǎn):當位移一定時(shí), 傾斜產(chǎn)生的誤差將隨傾斜角的增大而增大;當傾斜角一定時(shí), 傾斜產(chǎn)生的誤差將隨位移的增大而增大[7].因此, 對于激光測距儀的測量精度而言, 主要在于對應測點(diǎn)處的車(chē)身測試面傾斜角的大小以及車(chē)身測試面位移的大小.
3.1.1、駛入角對測試精度的影響
在實(shí)際跑偏測試中, 測試車(chē)輛駛入測點(diǎn)時(shí)總會(huì )產(chǎn)生一定的駛入角 (受駕駛員操作及車(chē)輛自身因素的影響) , 盡管在上述跑偏測試算法中排除了駛入角對跑偏量的影響, 但是由于車(chē)輛駛入角越大, 將導致車(chē)身測試面的傾斜越厲害即傾斜角越大, 進(jìn)而使得測量的誤差越大[8];對于這一點(diǎn), 首先可以通過(guò)試驗標定進(jìn)行誤差補償, 其次就是要通過(guò)減小測試車(chē)輛的駛入角來(lái)減小測試誤差.
3.1.2、測試面位移對測試精度的影響
由于在實(shí)際跑偏測試中測試車(chē)輛駛過(guò)測點(diǎn)時(shí)會(huì )存在一定的傾斜角, 而傾斜角一定, 傾斜產(chǎn)生的誤差將隨位移的增大而增大.測試車(chē)輛駛入測點(diǎn)前會(huì )觸發(fā)其前端相應的光電開(kāi)關(guān), 從而開(kāi)啟激光測距儀進(jìn)行測量, 測試箱中的電流采集卡便采集此時(shí)激光測距儀的電流測試信號并將其傳給主機, 經(jīng)過(guò)主機程序計算處理后得到相應的距離值即坐標值.激光測距儀的測量速度即輸出率高達3 k Hz, 現將采集卡的采樣率設置為1 k Hz.由于車(chē)輛在x軸方向上的坐標值誤差隨著(zhù)車(chē)身測試面位移的增大而增大, 所以理論上選擇用作計算坐標值的測試面越小越好 (考慮極端情況就是車(chē)身上某一固定點(diǎn)) , 然而測試車(chē)輛在測試區的行駛速度為50~90 km·h-1, 若車(chē)身長(cháng)度為4 m, 則汽車(chē)通過(guò)測點(diǎn)所需的時(shí)間 (由于光電開(kāi)關(guān)和激光測距儀的距離很近, 計算時(shí)間時(shí)可以將其忽略不計) 為0.159~0.288 s, 在這段時(shí)間內, 理論上采集到的數據點(diǎn)數為159~288個(gè)即對應的距離值點(diǎn)數為159~288個(gè).因此幾乎無(wú)法讀取到車(chē)身測試面上某固定點(diǎn)處對應的數據值, 而只能選取測試面某一區域對應的測試數據作為車(chē)輛x軸坐標值的計算參考值.現將車(chē)身測試面分為3部分 (等距劃分) :車(chē)頭、車(chē)身、車(chē)尾, 則每一部分對應的數據點(diǎn)數應為53~96個(gè).由于車(chē)頭和車(chē)尾部位流線(xiàn)型較大, 而且當激光射在車(chē)燈上時(shí) (激光測距儀的測點(diǎn)與測試路面的垂直距離約為80 cm, 能照到測試車(chē)輛前照燈) , 此時(shí)激光測距儀無(wú)法測量出相應的距離值, 而車(chē)身部分比較平整, 區域內測距誤差較小, 適合作為車(chē)輛的坐標測試區域.若選作坐標計算的數據點(diǎn)數過(guò)少, 則有可能會(huì )導致測量誤差偏大.綜上, 選取測試車(chē)輛通過(guò)測點(diǎn)時(shí)采集到的有效數據點(diǎn)中對應于車(chē)身區域的前50個(gè)點(diǎn)作為車(chē)輛坐標計算參考點(diǎn).
3.2、數據采集與處理部分的精度分析
系統數據采集與處理部分誤差主要在于系統靜態(tài)標定時(shí)的數據誤差以及動(dòng)態(tài)測量時(shí)的數據誤差.
3.2.1、系統靜態(tài)標定的誤差分析
系統安裝完成后, 為了保證測試精度, 首先要測量出在測試區的二維坐標下各測點(diǎn)準確的坐標值 (測點(diǎn)二維參數) , 這是保障測量精度的前提.標定方法如圖3所示.
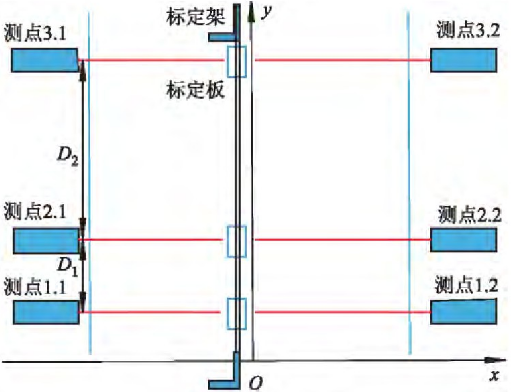
圖3 系統標定示意圖
將2個(gè)標定架[9]放置于跑道中心線(xiàn)上且分別位于測點(diǎn)1和測點(diǎn)3兩端, 從兩端標定架上引出2根鋼絲繩 (形成一個(gè)大平面) , 將3塊標定板通過(guò)細線(xiàn)掛在鋼絲繩上且分別放置于3個(gè)測點(diǎn)處 (在開(kāi)始標定先對每組測點(diǎn)左右兩側激光測距儀的位置進(jìn)行校準, 使兩側激光在空間上重合) , 通過(guò)激光水平儀調整標定架和標定板的位置, 使標定板所在平面與路面垂直且投影在路面上的線(xiàn)段與道路中心線(xiàn)重合.由于標定板自身厚度為3.0 mm, 所以標定測量時(shí)各測點(diǎn)x方向的坐標均應加上1.5 mm.準備就緒后即開(kāi)始標定各測點(diǎn)的二維參數值 (各測點(diǎn)的y坐標通過(guò)手工測量) , 在主機上運行標定程序, 如圖4所示.按照標定程序的說(shuō)明步驟操作程序, 即可得到各測點(diǎn)的標定數據, 同時(shí)各激光測距儀的顯示屏上也會(huì )顯示出相應的距離值.標定結果如圖4所示, 可知系統靜態(tài)標定的主機數據 (通過(guò)數據采集與處理得到的數據) 的誤差在±1 mm以?xún)?
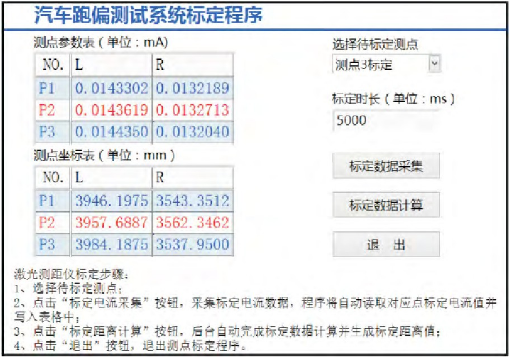
圖4 標定程序界面圖
3.2.2、系統動(dòng)態(tài)測量的誤差分析
設定激光測距儀的輸出為電流型模擬量輸出, 且設置為與距離值正相關(guān).激光測距儀的MF (multifunctional) 多功能輸入端與光電開(kāi)關(guān)接收端 (光電開(kāi)關(guān)是成對使用的, 由發(fā)射端和接收端組成) 的信號輸出端相連, 系統測試過(guò)程中當光電開(kāi)關(guān)未被觸發(fā)時(shí)激光測距儀處于待機狀態(tài), 不進(jìn)行距離測試, 此時(shí)電流模擬量輸出值為20.5 m A;當光電開(kāi)關(guān)被觸發(fā)時(shí), 激光測距儀處于開(kāi)啟狀態(tài), 開(kāi)始距離測試, 此時(shí)若測試距離小于激光測距儀設定的測量范圍的最小值, 則電流模擬量輸出值為3.5 m A;若測試距離大于設定的測量范圍的最大值, 則電流模擬量輸出值為20.5 m A;若測試距離在設定的測量距離范圍內, 則電流模擬量輸出值為4.0~20.0 m A, 且為有效電流值.測距儀的測量范圍為200~30 000 mm可調, 則距離與電流的關(guān)系式為

式中:d為距離, mm;I為電流, m A.
由式 (7) 可知, 系統動(dòng)態(tài)測量誤差主要由各個(gè)有效電流 (4.0~20.0 m A范圍內的電流值作為有效值) 自身誤差ΔI (由電流采集卡及激光測距儀內部電路的誤差引起) 以及有效電流數據整體波動(dòng)較大導致的誤差 (由激光測距儀動(dòng)態(tài)測量時(shí)的誤差引起) 產(chǎn)生.
對于單個(gè)有效電流數據I的誤差ΔI而言, 要使其減小比較困難 (除非更換更高精度的硬件, 但同時(shí)成本也將大幅提高) , 所以能做的就是通過(guò)數據處理的方法盡量減少距離值d的誤差Δd.由于激光測距儀的有效電流模擬量輸出范圍是4.0~20.0m A固定, 而其對應的測量范圍200~30 000 mm可調, 又Δd=1 862.50ΔI, 則在滿(mǎn)足系統測量要求的前提下, 盡量將激光測距儀測量范圍設置小一些, 測量誤差會(huì )減小.將激光測距儀的測量范圍調整為500~6 000 mm (該測量范圍是根據測點(diǎn)二維參數設定的) , 則距離與電流的關(guān)系式為

此時(shí)Δd'=343.75ΔI, 在ΔI一定的情況下, 式 (8) 計算出的Δd'明顯比式 (7) 中計算出的Δd要小, 即測量誤差更小.
選取測試車(chē)輛通過(guò)測點(diǎn)時(shí)采集到的有效電流數據點(diǎn)中對應于車(chē)身測試區域的前50個(gè)數據點(diǎn)作為車(chē)輛坐標計算參考點(diǎn), 數據提取子程序框圖如圖5所示.
現以測點(diǎn)1.1的激光測距儀的測試數據為依據進(jìn)行分析, 測試車(chē)輛經(jīng)過(guò)該測點(diǎn)時(shí)由數據提取程序采集到的有效電流數據如圖6所示.共采集到207個(gè)數據點(diǎn), 按照程序中的算法, 提取到的有效數據點(diǎn)即是從第69個(gè)數據點(diǎn)到第118個(gè)數據點(diǎn), 從圖6可以看出中間段的數據相比兩端的數據更穩定.
提取到的電流數據如圖7所示, 提取到的電流為 (13.65±0.05) m A, 由Δd'=343.75ΔI可知, 此時(shí)的距離誤差為Δd'=±17.19 mm.此時(shí)誤差過(guò)大不滿(mǎn)足測試要求, 應對提取的有效電流進(jìn)行數據處理.數據處理的子程序框圖如圖8所示.
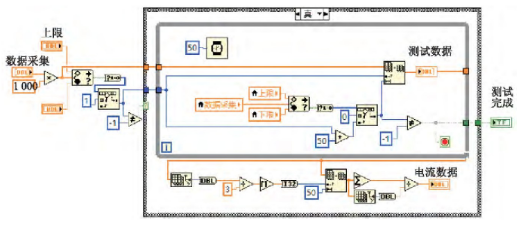
圖5 數據提取子程序框圖
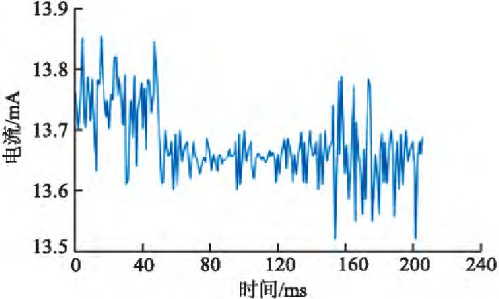
圖6 有效電流數據圖
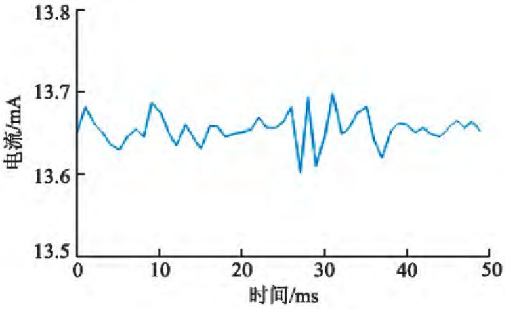
圖7 提取的電流數據圖
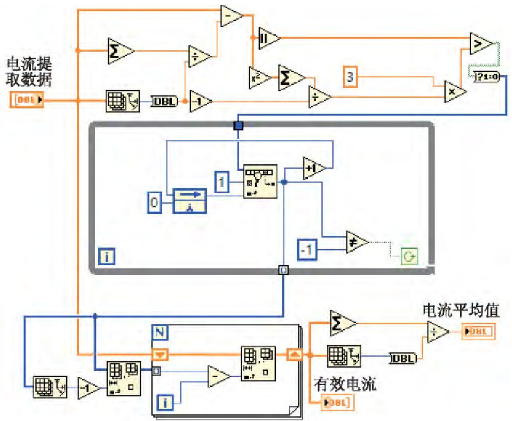
圖8 數據處理子程序框圖
數據處理步驟: (1) 求出算術(shù)平均值珔d, 計算其殘差Δi=di-珔d, i=1, 2, …, n; (2) 求其標準偏差的估計值e; (3) 判別粗大誤差, 當|Δi|≥3e時(shí), 則剔除掉對應的電流數據值; (4) 將剩下的有效電流數據取算術(shù)平均值作為該測點(diǎn)測量距離值的計算值.經(jīng)數據處理程序處理后得到的電流數據如圖9所示, 與圖7相比, 得到的電流數據更加精確.
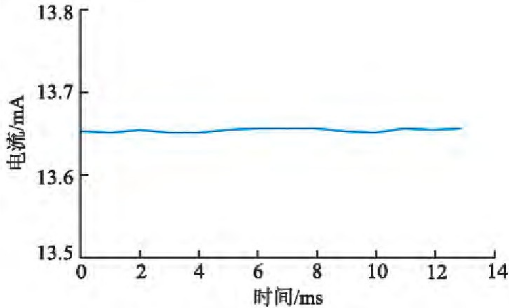
圖9 處理后的電流數據圖
4、系統測量控制方法
4.1、系統測量控制策略
系統的測試流程:測試員駕駛測試車(chē)輛進(jìn)入跑偏測試跑道, 當駛入測試信號發(fā)射區時(shí)按下手持終端上相應的測試信號發(fā)送鍵, 手持終端則通過(guò)系統的無(wú)線(xiàn)局域網(wǎng)與主機建立連接并向主機發(fā)送測試信號[10], 當主機收到測試信號時(shí)即開(kāi)啟測點(diǎn), 測試車(chē)輛依次通過(guò)3組測點(diǎn), 主機計算出測試結果并將其發(fā)送給手持終端.
為了保證多臺車(chē)輛進(jìn)行測試時(shí)系統不會(huì )出現測試響應慢、測試數據混亂、手持終端接收不到測試結果等問(wèn)題, 提出控制策略: (1) 利用程序里面的隊列函數使手持終端發(fā)送的測試信號數據以及各測點(diǎn)相應測試數據按照先后順序入隊列和出隊列 (先入先出, 后入后出) , 這樣就能保證多臺車(chē)輛測試時(shí)程序能快速響應且每臺車(chē)輛都能正常測試而不會(huì )出現測試混亂; (2) 在無(wú)線(xiàn)通信程序中為每個(gè)手持終端 (各終端的IP地址不同) 按照其相應的IP地址分配不同的數據存儲區, 用來(lái)存儲相應的測試信號以及測試結果等數據.這樣就能保證多臺車(chē)輛正常測試時(shí)各手持終端接收到的測試結果不會(huì )出現混亂; (3) 當出現網(wǎng)絡(luò )信號波動(dòng) (手持終端發(fā)送數據掉包) 時(shí), 可能會(huì )出現發(fā)送失敗的情況, 為了保證這種情況下系統能正常測試, 則通過(guò)C#程序來(lái)控制手持終端信號發(fā)送策略, 即測試員按發(fā)送鍵之后手持終端將以500 ms的間隔時(shí)間不斷地向主機發(fā)送測試信號, 直到發(fā)送成功[11].這樣就能保證發(fā)送失敗時(shí)車(chē)輛在駛入信號發(fā)射區后部時(shí)也能成功發(fā)送測試信號并進(jìn)行正常的測試.
綜上所述, 通過(guò)相應的控制方法使得系統在各種狀況下都能正常測試.
4.2、系統測試
在經(jīng)過(guò)前期測試系統的搭建后, 接下來(lái)就要對該系統進(jìn)行測試, 系統測試跑道如圖10所示, 測試單元如圖11所示.由于汽車(chē)在行駛過(guò)程中無(wú)法直接人工測量其跑偏量, 故采用軌跡法 (測量相應車(chē)輪的軌跡線(xiàn)) 人工測量其跑偏量.讓多臺測試車(chē)輛依次連續進(jìn)行測試 (人工測量時(shí)以不同顏色的軌跡線(xiàn)對不同車(chē)輛加以區分) , 由測試結果 (取部分信息) 可知, 該測試系統能保證多臺車(chē)輛依次連續進(jìn)行測試且測量誤差小于2 cm, 能滿(mǎn)足實(shí)際測試要求.

圖10 系統測試跑道

圖11 系統測試單元
5、結論
1) 每個(gè)測點(diǎn)在測試道路的兩側各安裝1只激光測距傳感器, 將對車(chē)身側表面到傳感器安裝點(diǎn)的距離轉換為對車(chē)身縱向中心平面至傳感器安裝點(diǎn)距離的測量, 由此避免了因路面不平激起車(chē)輛的振動(dòng)導致被測車(chē)輛到達3個(gè)測點(diǎn)時(shí)3只激光測距傳感器對車(chē)身側面測點(diǎn)的不同所產(chǎn)生的誤差.
2) 對每個(gè)測點(diǎn)所測得的多組數據進(jìn)行分類(lèi)、挑選、異常數據剔除等處理, 大大減小了測試誤差.
3) 利用第1, 2個(gè)測點(diǎn)所得被測車(chē)輛的駛入角校正測試結果, 有效避免駛入角所導致的測試誤差.
4) 利用隊列函數, 有效解決了汽車(chē)行駛跑偏在線(xiàn)自動(dòng)測試中容易出現的多輛被測車(chē)輛跟隨連續測試過(guò)程, 其測試結果與被測車(chē)輛的對應關(guān)系混亂的問(wèn)題.通過(guò)理論分析以及試驗, 驗證了該系統具有精度高、響應快、適應性強等優(yōu)點(diǎn), 而且系統操作簡(jiǎn)單, 開(kāi)發(fā)成本和維護成本低, 安裝、調試和維護方便.該系統對于目前整車(chē)生產(chǎn)商具有實(shí)用意義, 在其他領(lǐng)域也具有一定的實(shí)用價(jià)值.
參考文獻
[1]何耀華, 厲曉飛.基于近景攝影測量技術(shù)的汽車(chē)跑偏測試系統構建[J].中國工程機械學(xué)報, 2011, 9 (4) :476-481.HE Y H, LI X F.Vehicle-wandering testing system based on close-range photogrammetric technology[J].Chinese Journal of Construction Machinery, 2011, 9 (4) :476-481. (in Chinese)
[2]榮銳兵, 嚴運兵, 方園, 等.基于激光測距的車(chē)輛行駛跑偏測量系統[J].公路與汽運, 2012 (3) :5-7.RONG R B, YAN Y B, FANG Y, et al.Vehicle-wandering testing system based on laser ranging[J].Highways&Automotive Applications, 2012 (3) :5-7. (in Chinese)
[3]周興林, 李程, 劉漢麗, 等.基于雙目視覺(jué)的車(chē)輛行駛跑偏在線(xiàn)自動(dòng)檢測系統[J].中國機械工程, 2015, 26 (1) :130-134.ZHOU X L, LI C, LIU H L, et al.On-line automatic vehicle driving wandering test system based on binocular vision[J].China Mechanical Engineering, 2015, 26 (1) :130-134. (in Chinese)
[4]陳長(cháng)軍, 王剛, 劉勇, 等.基于數字圖像的車(chē)輛行駛跑偏在線(xiàn)測量方法[J].測繪科學(xué), 2014, 39 (9) :102-106.CHEN C J, WANG G, LIU Y, et al.An automatic automobile deflection measurement method based on digital image[J].Science of Surveying and Mapping, 2014, 39 (9) :102-106. (in Chinese)
[5]錢(qián)楓元, 何耀華, 宋朋舉.汽車(chē)二維運動(dòng)參數測試系統開(kāi)發(fā)研究[J].武漢理工大學(xué)學(xué)報 (交通科學(xué)與工程版) , 2016, 40 (2) :365-368.QIAN F Y, HE Y H, SONG P J.Research on the development of non-contact two dimensional automobile running track test system[J].Journal of Wuhan University of Technology (Transportation Science&Engineering) , 2016, 40 (2) :365-368. (in Chinese)
[6]陳琳.基于激光測距的三坐標測量系統研究[J].光學(xué)儀器, 2002, 24 (2) :7-12.CHEN L.The 3-dimension measuring system based on the laser ranging[J].Optical Instruments, 2002, 24 (2) :7-12. (in Chinese
[7]曲興華, 戴建芳, 張福民.基于激光測距的大尺寸測量應用研究[J].儀器儀表學(xué)報, 2009, 30 (3) :481-485.QU X H, DAI J F, ZHANG F M.Application study on laser ranging in large-scale measurement[J].Chinese Journal of Scientific Instrument, 2009, 30 (3) :481-485. (in Chinese)
[8]王海星.駛入角對跑偏測試結果影響的仿真研究[J].武漢理工大學(xué)學(xué)報 (信息與管理工程版) , 2015, 37 (5) :438-441.WANG H X.Influence of entering angles on wandering test values[J].Journal of WUT (Information&Management Engineering) , 2015, 37 (5) :438-441. (in Chinese)
[9]何耀華, 熊婷.汽車(chē)行駛跑偏測試系統中標定架的設計[J].武漢理工大學(xué)學(xué)報 (信息與管理工程版) , 2014, 36 (2) :185-189.HE Y H, XIONG T.Calibration frame in vehicle driving wandering test system[J].Journal of WUT (Information&Management Engineering) , 2014, 36 (2) :185-189. (in Chinese)
[10]HE Y H, YANG C, SHANG B.Vehicle driving wandering test system based on Lab VIEW[C]∥SAE International.USA:SAE Publication Group, Paper Number:2010-01-0998.
[11]ZHOU Z T, HE Y H, WANG D.Research on wireless communication strategy in online automatic test system for vehicle driving wandering[C]∥SAE International.USA:SAE Publication Group, Paper Number:2015-26-0236.