24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘要:文章以現有汽車(chē)行駛速度系統的數學(xué)模型為基礎, 將PID控制算法引入其中, 在Simulink仿真軟件中, 建立汽車(chē)行駛速度PID控制系統的仿真模型, 分析系統在有阻尼和無(wú)阻尼情況下, 繪制汽車(chē)行駛速度曲線(xiàn)圖, 同時(shí)建立無(wú)PID控制時(shí)汽車(chē)行駛速度系統模型。分析結果表明, 在有阻尼的情況下, 汽車(chē)行駛速度曲線(xiàn)很快收斂并達到穩定狀態(tài), 在無(wú)阻尼的情況下, 汽車(chē)行駛速度曲線(xiàn)超調量較大并且達到穩定狀態(tài)所需時(shí)間較長(cháng)。若去掉PID控制, 汽車(chē)行駛速度只能達到在最小車(chē)速以下某一值, 若無(wú)阻尼, 則汽車(chē)行駛速度收斂于最小車(chē)速。該研究對提高汽車(chē)行駛速度控制系統的精度和穩定性有一定參考價(jià)值。
關(guān)鍵詞:汽車(chē); 行駛速度; 控制; 仿真;
Abstract:Based on the mathematical model of the existing vehicle speed system, this paper introduces the PID control algorithm into it, and establishes the simulation model of the vehicle speed PID control system in the Simulink simulation software. In the case of damped and undamped, the vehicle speed curve is drawn, and the vehicle speed system model without PID control is established at the same time. The analysis results show that the vehicle speed curve converges quickly and reaches the stable state under the condition of damping, and the vehicle speed curve overshoot is larger and the time to reach the stable state is longer under the condition of no damping. If the PID control is removed, the vehicle speed can only reach a certain value below the minimum speed. If there is no damping, the vehicle speed converges to the minimum speed. The research has certain reference value for improving the precision and stability of the vehicle speed control system.
Keyword:vehicle; driving speed; control; simulation;
汽車(chē)行駛控制系統是應用非常廣泛的控制系統之一, 其主要的目的是對汽車(chē)的速度進(jìn)行合理的控制, 它是一個(gè)典型的反饋控制系統。在控制領(lǐng)域當中, 運用較多的是PID控制器。PID控制器 (比例-積分-微分控制器) , 由比例單元P、積分單元I和微分單元D組成[2]。通過(guò)kp, ki和kd三個(gè)參數的設定。PID控制器主要適用于基本上線(xiàn)性, 且動(dòng)態(tài)特性不隨時(shí)間變化的系統。PID控制器是一個(gè)在工業(yè)控制應用中常見(jiàn)的反饋回路部件[6]。
文章將PID控制算法應用于汽車(chē)行駛速度控制系統中, 在Matlab的Simulink模塊中, 建立汽車(chē)行駛控制系統的仿真模型并進(jìn)行分析。
1、汽車(chē)行駛速度控制原理
汽車(chē)行駛速度PID控制系統實(shí)質(zhì)是一個(gè)速度反饋控制系統, 通過(guò)系統的輸出信號改變系統的輸入信號, 其工作原理[1]為:
(1) 通過(guò)汽車(chē)的速度操縱機構操縱桿的位置變化控制發(fā)動(dòng)機節氣門(mén)開(kāi)度以改變發(fā)動(dòng)機牽引力從而實(shí)現汽車(chē)行駛速度的變化。
(2) 由于慣性的存在, 汽車(chē)的行駛速度不可能立即達到期望速度, 實(shí)際車(chē)速與期望車(chē)速之間必然會(huì )有差值, 系統實(shí)時(shí)測量并反饋實(shí)際車(chē)速, 并與期望車(chē)速取差值。
(3) 根據速度差值改變節氣門(mén)開(kāi)度以改變發(fā)動(dòng)機牽引力從而實(shí)現當前汽車(chē)行駛速度, 直到與期望車(chē)速一致。
2、汽車(chē)行駛速度PID控制系統數學(xué)模型
汽車(chē)行駛簡(jiǎn)易模型如圖1所示:
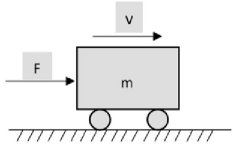
圖1 汽車(chē)行駛簡(jiǎn)易模型
汽車(chē)行駛速度PID控制系統包括以下三部分:汽車(chē)速度操縱機構位置變換器、汽車(chē)行駛速度PID控制器和汽車(chē)動(dòng)力機構[3], 各部分的數學(xué)模型如下。
2.1、汽車(chē)速度操縱機構位置變換器
汽車(chē)行駛速度控制系統的速度操縱機構位置變換器的作用, 是將操縱桿的位置轉換為汽車(chē)期望行駛速度, 操縱桿的位置與期望車(chē)速為線(xiàn)性關(guān)系, 其對應數學(xué)模型為:

式中:
v——與操作機構位置相對應的汽車(chē)行駛速度目期望值, km/h;
k——操縱機構的位置變化率與速度變化率的比值;
x——速度操縱桿的位置, 單位:米 (m) ;
b——汽車(chē)行駛最小車(chē)速, km/h。
2.2、汽車(chē)行駛速度PID控制器
汽車(chē)行駛速度PID控制器是汽車(chē)行駛速度PID控制系統的核心部分, 其原理是根據當前實(shí)際車(chē)速與期望車(chē)速的差值來(lái)控制發(fā)動(dòng)機節氣門(mén)開(kāi)度以改變發(fā)動(dòng)機牽引力, 進(jìn)而使汽車(chē)行駛速度達到期望車(chē)速。其實(shí)質(zhì)為速度反饋控制, 反饋控制的數學(xué)模型為:

式中:
u (t) ——控制量;
kp——比例控制部分的增益系數, 其作用是減少被控制系統的上升時(shí)間和靜態(tài)誤差, 但不能消除靜態(tài)誤差;
e (t) ——偏差 (汽車(chē)當前實(shí)際車(chē)速與期望車(chē)速的差值) ;
ki——積分控制部分的增益系數, 其作用是消除靜態(tài)誤差;
kd——微分控制部分的增益系數, 其作用是提升系統穩定性, 減少過(guò)渡時(shí)間, 降低超調量。
2.3、汽車(chē)動(dòng)力機構
汽車(chē)動(dòng)力機構的作用是在牽引力的作用下改變汽車(chē)的運行速度。牽引力與汽車(chē)行駛速度的關(guān)系為:
牽引力與汽車(chē)行駛速度
式中:
m——汽車(chē)的質(zhì)量;
v——汽車(chē)行駛過(guò)程中的實(shí)際速度;
F——汽車(chē)行駛過(guò)程中發(fā)動(dòng)機的牽引力;
c——汽車(chē)行駛過(guò)程中的阻尼系數。
3、汽車(chē)行駛速度PID控制系統仿真模型的建立與仿真
根據汽車(chē)行駛速度PID控制系統的工作原理組建的汽車(chē)行駛速度PID控制流程圖如圖2所示。
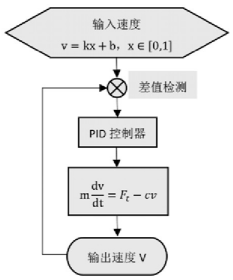
圖2 汽車(chē)行駛速度PID控制流程圖
表1 某小車(chē)參數
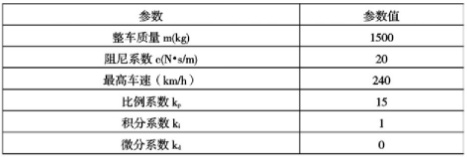
現以某小車(chē)為例, 進(jìn)行建模并仿真分析, 具體參數如表1所示。
該車(chē)所能達到的最高車(chē)速為240km/h, 我國規定高速路最高限速為120km/h, 現擬該車(chē)行駛最小車(chē)速為10km/h, 期望車(chē)速為120km/h, 則速度變化率為110, 操縱桿的位置與期望車(chē)速之間的數學(xué)模型為:

此時(shí)操縱桿的位置為:

仿真時(shí)間設置為1000s, 系統采樣周期為0.02s, 即示波器數據點(diǎn)數為50000, 建立汽車(chē)行駛速度PID控制系統Simulink仿真模型如圖3所示。如果沒(méi)有阻尼, 汽車(chē)行駛速度PID控制系統Simulink仿真模型如圖4所示。若去掉PID控制, 汽車(chē)行駛速度Simulink仿真模型如圖5所示。
運行仿真模型輸出汽車(chē)行駛速度曲線(xiàn)圖, 結果分別如圖6-8所示。
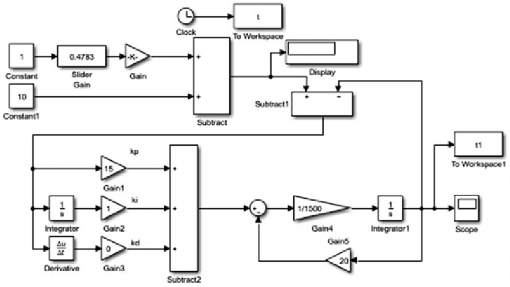
圖3 汽車(chē)行駛速度PID控制Simulink仿真模型
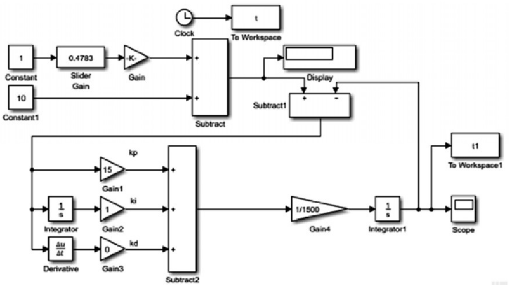
圖4 汽車(chē)行駛速度PID控制無(wú)阻尼Simulink仿真模型
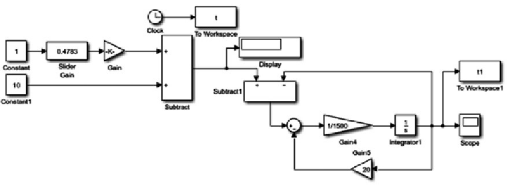
圖5 汽車(chē)行駛速度無(wú)PID控制Simulink仿真模型
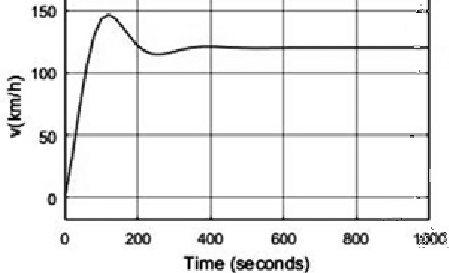
圖6 汽車(chē)行駛速度有阻尼曲線(xiàn)圖
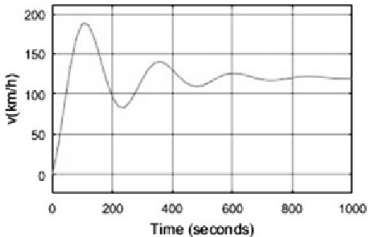
圖7 汽車(chē)行駛速度無(wú)阻尼曲線(xiàn)
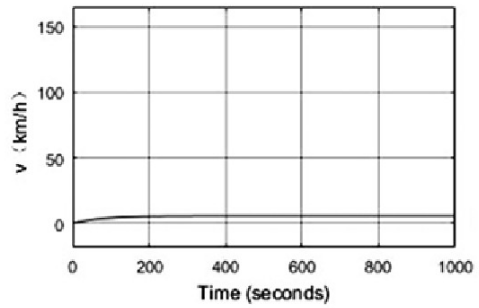
圖8 汽車(chē)行駛速度無(wú)PID控制曲線(xiàn)圖
4、結果分析
對比圖6與圖7可知, 在有阻尼的情況下, 汽車(chē)行駛速度曲線(xiàn)很快收斂并達到穩定狀態(tài), 在無(wú)阻尼的情況下, 汽車(chē)行駛速度曲線(xiàn)超調量較大并且達到穩定狀態(tài)所需時(shí)間較長(cháng)。由圖8可知, 若去掉PID控制, 汽車(chē)行駛速度只能達到在最小車(chē)速以下某一值, 若無(wú)阻尼, 則汽車(chē)行駛速度收斂于最小車(chē)速。
參考文獻
[1]尤嚴俊.基于多目標PID的重型汽車(chē)ESP控制系統研究[D].石家莊鐵道大學(xué), 2016.
[2]祝東鑫.汽車(chē)巡航系統模糊控制與仿真研究[D].遼寧工業(yè)大學(xué), 2016.
[3]白永鑫.基于汽車(chē)行駛速度隨動(dòng)系統的模糊PID控制及仿真[J].唐山師范學(xué)院學(xué)報, 2015, 37 (05) :60-63.
[4]劉大鵬, 宋娟, 周唯.基于VRT車(chē)輛速度控制系統的設計[J].電子科學(xué)技術(shù), 2014, 01 (02) :218-223.
[5]陳學(xué)文, 張衍成, 李萍, 王陽(yáng).汽車(chē)主動(dòng)懸架自適應模糊PID控制研究[J].機械設計與制造, 2014, (02) :153-156.
[6]齊忠琪, 魯斐.PID控制器在智能汽車(chē)速度控制方面的應用[J].中國教育技術(shù)裝備, 2012, (21) :105-106.
[7]馮勇, 吳凱, 劉夢(mèng)安.基于模糊PID算法的汽車(chē)半主動(dòng)懸架振動(dòng)控制[J].汽車(chē)零部件, 2012, (05) :50-54+69.
[8]吳慧峰.汽車(chē)懸架并聯(lián)式模糊PID控制的仿真研究[J].制造業(yè)自動(dòng)化, 2012, 34 (09) :102-104+108.