24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
本文設計制作的軟體擬人機械手,與人手大小比例為 1.2:1,主要包括兩類(lèi)手指,其 它四指和大拇指。其它四指有三個(gè)指節,由水平分布的小氣室分割,并由三層硅膠層組 成兩個(gè)氣室,彎曲氣室和變剛度氣室,彎曲氣室控制軟體手指的彎曲,變剛度氣室控制 軟體手指的剛度。設計的大拇指的與其它四指大致相同,不同點(diǎn)在于大拇指只有兩個(gè)指 節,彎曲層上氣室分布不同于其它四指的水平分布,而是與手指徑向呈 30 度傾斜,這 樣的設計可以使大拇指在彎曲的同時(shí)實(shí)現一定角度的側擺,模仿人手大拇指抓取時(shí)的動(dòng)作。
為了使軟體擬人機械手獲得最佳的抓取效果,通過(guò)有限元分析對軟體手指幾何參數 進(jìn)行優(yōu)化,以及制作材料進(jìn)行選擇。在其他參數不變的前提下,設計不同壁厚的彎曲氣 室模型進(jìn)行有限元分析,在考慮到實(shí)際應用后,確定了手指的最佳壁厚;設計了不同半 徑的彎曲氣室進(jìn)行有限元對比分析,得出最優(yōu)的半徑值;通過(guò)拉伸實(shí)驗得到不同比例混 合的硅膠材料力學(xué)性能參數,分別采用各材料的力學(xué)性能參數進(jìn)行對比有限元分析,確 定了最佳的混合比例。
在軟體擬人機械手抓取實(shí)驗中,驗證了有限元分析中軟體手指指根關(guān)節轉角與氣壓 之間關(guān)系的正確性。搭建實(shí)驗平臺,測量軟體手指指尖壓力大小與氣壓之間的關(guān)系,設 計實(shí)驗驗證軟體手指剛度改變對手指抓取重物的影響。在軟體擬人機械手抓取實(shí)驗測試 中,并得出了一些結論:軟體手因為自身特點(diǎn),對圓柱體類(lèi)物件抓取能力較強;軟體手 在抓取非圓柱體時(shí),能夠根據物件本身形狀,實(shí)現自適應抓取。試驗中還獲得了軟體擬 人手有效的抓取物體直徑范圍,以及做了軟體手擬人手變剛度的實(shí)驗對比。
關(guān)鍵詞:軟體機器人;擬人手;氣動(dòng)驅動(dòng);變剛度

Abstract
The software anthropomorphic robot designed and produced in this paper ,comparing with human hands has a ratio of 1.2:1 , which mainly includes two types of fingers, a thumb and the other four-finger . The other four-fingers have three knuckles, which are pided by some horizontally small air chambers, and composed of three layers of silica gel to form two air chambers. a curved chamber and a variable stiffness chamber. The curved chamber controls the bending of the soft finger. The stiffness chamber controls the stiffness of the soft finger . The design of the thumb is roughly the same as that of the other four fingers, but the thumb has only two knuckles. The distribution of the air chamber on the curved layer is different from the horizontal distribution of the other four fingers, but it is inclined at 30 degrees to the radial direction of the finger, it makes the thumb bends while achieving a certain angle of the side swing, imitating the grasping action of the human's thumb.
In order to obtain the best gripping effect of the soft anthropomorphic robot, through finite element analysis, the geometric parameters of soft finger are optimized and the material is selected. Under the premise of other parameters are unchanged, the comparative finite element analysis were carried out by designing curved air chamber models with different wall thicknesses. After considering the practical application, acquired the optimal wall thickness of the fingers;The different radius curved chamber is designed to carry on the contrast finite element analysis.We also obtained the optimal radius value; The mechanical properties of each silica gel material were obtained by tensile test, and the mechanical properties of each material were used for comparative finite element analysis to determine the optimum mixing ratio .
In the soft anthropomorphic robotic hand grabbing experiment, the relationship between the soft finger finger joint angle and the air pressure in the finite element analysis was verified. The experimental platform was built to measure the relationship between the soft finger fingertip's pressure and the air pressure. Designing experiments verified soft finger stiffness changes effected on grabbing weight. The grabbing experiment of the soft anthropomorphic robotic hand was carried out, and some conclusions were drawn: the soft body is very suitable for grabbing the cylindrical objects because of its own characteristics; The soft body can grasp the shape of the object according to the shape of the object itself ,when grasping the non-cylindrical body. In the grabbing experiment,we also obtained the effective range of the grasping object diameter of the soft body, and made an experimental comparison under different stiffness of the soft anthropomorphic robot hand.
Key words: software robot; anthropomorphic hand; pneumatic drive; variable stiffness
目 錄
第1章緒論
1.1選題背景及意義
自機器人于20世紀中葉問(wèn)世以來(lái),極大地推動(dòng)了世界工業(yè)生產(chǎn),同時(shí)工業(yè)的磅礴發(fā)展,也驅使機器人技術(shù)得到了快速提升。自上世紀60年代,一款名為Unimate的工業(yè)機器人由美國科技公司研發(fā)問(wèn)世以來(lái),機器人在生產(chǎn)中的應用越來(lái)越廣泛,也標志著(zhù)工業(yè)生產(chǎn)進(jìn)入機器人時(shí)代[1-4].隨著(zhù)機器人技術(shù)越來(lái)越成熟,其應用領(lǐng)域也變得越來(lái)越復雜,在一些生產(chǎn)全過(guò)程,甚至不需要人的參與。但在面對特殊易碎工業(yè)產(chǎn)品時(shí),剛性工業(yè)機器人,可能會(huì )對其造成損傷,如何使機械手擁有人手一樣的柔性,一直是機器人研究的一個(gè)重要方向,軟體機器人也由此而提出,它的出現彌補了剛性機器人柔性不足的問(wèn)題。目前軟體機器人的應用已經(jīng)不再限于抓取領(lǐng)域,其在康復醫療、野外勘探、仿生學(xué)等領(lǐng)域也得要的一定的應用。其柔軟的特性,非常適合于對偏癱患者的物理;這一特性還與自然界中很多生物體相似,軟體生物也成了軟體機器人仿生的焦點(diǎn)。目前仿生機器人還是剛性機器人為主,但隨著(zhù)機器人技術(shù)的發(fā)展,研制機器人的材料也越來(lái)越多樣化。為了復現自然界生物的柔軟性,研究人員以硅膠材料為本體,研制出了軟體仿生機器人。相較于傳統的工業(yè)機器人,柔性機器人有更多的自由度,其低廉的制造成本,使得軟體機器人有被廣泛應用的潛力。硅膠材料超強的伸縮和穩定的化學(xué)性能而使其在環(huán)境檢測中有很好的發(fā)揮。軟體機器人與傳統的剛性機器人的差別不僅僅體現在柔軟性上,在驅動(dòng)方式上,軟體機器人有更多化的驅動(dòng)方式,包括形狀記憶合金(SMA)驅動(dòng)、氣動(dòng)驅動(dòng)、電活性聚合物(EAP)驅動(dòng)等。機器人擬人手是對人手外形和功能的仿生[6],也是機器人更加靈巧化、智能化的標志。現階段傳統的剛性機器人手結構簡(jiǎn)單,只能實(shí)現簡(jiǎn)單的夾取,這樣做的優(yōu)勢在于控制簡(jiǎn)單,研發(fā)成本低,但也大大的制約了機器人技術(shù)的發(fā)展。為了使機械手更加的智能化、靈巧化、擬人化,推動(dòng)機器人技術(shù)向前發(fā)展,國內外越來(lái)越多高校及科研機構都致力于機械手的研發(fā),也取得了一定的成果。與此同時(shí)軟體機械手也多到了越來(lái)越多科研工作者的青睞,一些軟體仿生機器人迎刃而出,如仿生軟體蚯蚓和仿生軟體章魚(yú)[5]等。軟體手的研制也是軟體機器人研究的重要方向,但軟體結構軟體手往往具有剛性不足、抓取不穩等缺點(diǎn)。為了實(shí)現軟體手的擬人抓取功能,控制一個(gè)軟體擬人手,可能需要十幾個(gè)氣源,十到二十個(gè)氣動(dòng)元器件,使軟體擬人手的控制變得異常復雜。為了解決以上問(wèn)題,本文研制了一款能主動(dòng)改變剛度的軟體擬人手,該軟體機械手還能模仿人手抓取動(dòng)作,時(shí)軟體手的抓取更加穩定。軟體手只需要兩個(gè)氣源提供動(dòng)力,相對于十幾個(gè)氣源提供動(dòng)力的軟體機器人,其控制得到了極大簡(jiǎn)化。軟體機器人其柔軟、成本低、多自由度等特性,其應用前景也非常廣泛,對于軟體機器人的研究已經(jīng)越來(lái)越多。軟體機器人的研究從功能特性來(lái)進(jìn)行分類(lèi),大致可以分為仿生軟體機器人研究和軟體手爪研究,本文屬于對軟體手爪的研究。
1.2課題來(lái)源
本課題受以下項目資助:電子制造業(yè)智能機器人技術(shù)湖南省重點(diǎn)實(shí)驗室開(kāi)放基金,IRT2018005,軟體機械手設計與控制,2018/1-2019/12;中央高校基本科研基金項目,欠驅動(dòng)擬人機器人的設計與人機融合方法研究,2017-2021.
1.3機械擬人手的發(fā)展現狀
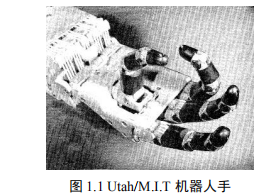
擬人機器人手的研究最開(kāi)始于剛性機器人,隨著(zhù)機器人技術(shù)的不斷發(fā)展進(jìn)步,剛體擬人機器人手的研制在外形和功能上也越來(lái)越與人手相似。最早的擬人手研究是來(lái)自于猶他大學(xué)與麻省理工學(xué)院聯(lián)合研制了一款剛性多功能機器人手爪[7],從擬人手的角度上來(lái)說(shuō),如下圖1.1所示,擬人機器人手Utah/M.I.T.包括一個(gè)大拇指和三個(gè)形同的食指,每個(gè)手指包括四個(gè)自由度。四根手指都包括一個(gè)側擺自由度和三個(gè)彎曲自由度,其他三根手指側擺角度范圍為-25°-25°,大拇指的側擺角度范圍為-45°-45°,四個(gè)根手指都有三個(gè)彎曲自由度,彎曲角度為0-95°,并且Utah/M.I.T.擬人手還包括一個(gè)具有三自由度的手腕關(guān)節,分別為前后屈伸自由度,屈伸角度為-45°-45°,左右側擺自由度,側擺角度為-15°-15°,以及繞中心軸旋轉自由度,旋轉角度為-135°-135°。
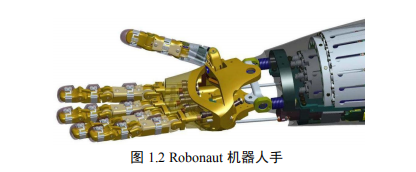
由美國國家宇航局(NASA)研發(fā)的擬人機器人手Robonaut[8],該擬人手應用于航天航空領(lǐng)域,及人類(lèi)難以到達或危險的環(huán)境中。如圖1.2所示,Robonaut擬人機器人手包括五根手指,與人手手指分布相同,該手包括14個(gè)自由度,其中擬人手手腕包括兩個(gè)自由度,前后伸屈自由度和左右側擺自由度,五根手指有12個(gè)自由。Robonaut擬人機器人手從機構上來(lái)區分,可以分為適用于復雜操作的靈巧機構和適用于簡(jiǎn)單夾持的輔助抓取機構,通過(guò)這樣的分類(lèi),靈巧機構模塊主要由三個(gè)自由度的大拇指、食指、和中指構成,輔助夾持機構則由一個(gè)自由度無(wú)名指、小拇指和手掌構成。
在2009年哈爾濱工業(yè)大學(xué)樊紹巍等人研制的HIT/DLRHandII機械手[9],如圖1.3所示,該擬人手由五個(gè)個(gè)完全相同的模塊化手指和一個(gè)獨立的手掌構成,共計15個(gè)自由度。大拇指,食指、中指、無(wú)名指、小拇指,所有手指采用模塊設計。中關(guān)節與遠關(guān)節采用鋼絲繩耦合,只能視為一個(gè)自由度,所以所有手指只包含2個(gè)彎曲自由度及一個(gè)側擺自由度,其所有驅動(dòng)系統、控制系統都集成在手掌內部,整個(gè)擬人手總重1.5千克。該擬人手能實(shí)現人手的所有抓取模式,就外形和功能而言,已經(jīng)與人手有很高的相識度。

2015年,華中科技大學(xué)的一款具有自適應性的擬人假肢手[10],如圖1.4所示,擬人假肢手包括大拇指和四個(gè)完全相同的手指,每個(gè)手指包括三個(gè)自由度,其中大拇指有一個(gè)側擺自由度和三個(gè)個(gè)彎曲自由度,其他的四根手指則只包含3個(gè)彎曲自由度,所以IR2-Hand擬人機器人手總共擁有16個(gè)自由度,而該手只由四個(gè)電機驅動(dòng),大拇指由兩個(gè)電機驅動(dòng),一控制大拇指側擺,一個(gè)電機控制彎曲,其它四根手指只由兩個(gè)電機的差動(dòng)繩索機構驅動(dòng),使其能實(shí)現自適應抓取和精準捏取等功能。
剛性擬人手是仿人手設計中研究最多的領(lǐng)域,剛性手的優(yōu)點(diǎn)也是十突出,控制精度高、輸出力矩大、反應迅速等等。但同時(shí)也存在很多不足,柔性差、研制成本高等等。軟體機器人,因其柔軟性研制成本低,也逐漸得到人們的重視。目前軟體機器人的應用也比較廣泛,主要集中在康復醫療、野外勘探、仿生以及抓取等領(lǐng)域中。
1.4軟體機器人研究現狀
軟體機器人是剛性機器人衍生物,因其柔軟和多自由度的特性,其應用前景也非常廣泛,現階段對于軟體機器人的研究,已經(jīng)越來(lái)越得到人們的重視。所謂仿生,即設計機器人使其能在外形和功能上達到與生物相同或相似的效果。目前軟體仿生機器人主要是模仿生物的生理功能,包括爬行、游行、蠕動(dòng)、跳躍、吸附等等。仿生章魚(yú)觸手的研究,最具代表性的是由歐洲委員會(huì )出資,由多個(gè)歐盟國家的科研人員組成的研究小組聯(lián)合研制的軟體章魚(yú)手[11-13]最為出名,如圖1.5所示,仿生章魚(yú)手由硅膠材料制作而成,其外形與海洋生物章魚(yú)觸手相似,采用繩索驅動(dòng),通過(guò)控制繩索的拉伸和收縮,實(shí)現仿生章魚(yú)手的運動(dòng),為研究章魚(yú)的運動(dòng)特性提供了平臺。

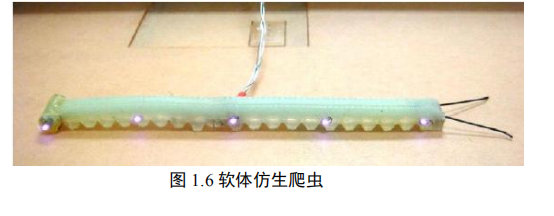
由塔夫茨大學(xué)的BarryTrimmer和Huai-TiLin等人研制了軟體仿生爬蟲(chóng)GoQBot[14],如圖1.6所示,GoQBot軀干由硅膠材料制作而成,外形與毛毛蟲(chóng)類(lèi)似,總長(cháng)度為10cm,其驅動(dòng)方式則是由內嵌的形狀記憶金屬進(jìn)行驅動(dòng),GoQBot仿生爬蟲(chóng)能在0.1秒內迅速蜷曲成環(huán)形,為軟體爬蟲(chóng)滾動(dòng)存儲巨大的能量,通過(guò)翻滾前進(jìn)將存儲的彈性勢能轉換成動(dòng)能,其轉速最高能達到200轉每分鐘,前進(jìn)速度則能達到0.2米每秒,GoQBot仿生爬蟲(chóng)還能實(shí)現跳躍運動(dòng),當其跳躍時(shí)瞬間加速度可達到1倍的重力加速度,能達到的最大高度接近兩米。
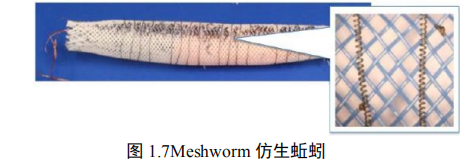
由哈佛大學(xué)、麻省理工大學(xué)和漢城大學(xué)共同研制的仿生蚯蚓軟體機器人Meshworm[15],如圖1.7所示,外殼是由硅膠材料制作而成,驅動(dòng)則是采用內嵌的現狀記憶金屬,并有鎳鈦合金彈簧配合運動(dòng),使Meshworm仿生蚯蚓在運動(dòng)過(guò)程中總長(cháng)度不會(huì )發(fā)生改變,Meshworm運動(dòng)原理在于,某一部分的記憶金屬收縮,就會(huì )通過(guò)彈簧使附近的記憶金屬伸張,并借助硅膠材料與地面間的摩擦力,實(shí)現向前蠕動(dòng)。
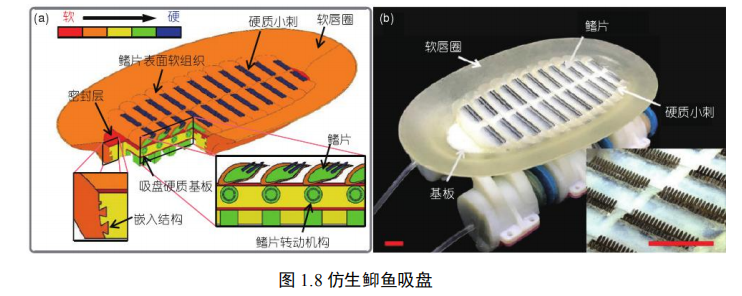
仿生?魚(yú)吸盤(pán)[16-17],該軟體仿生機器人由北京航天航空大學(xué)文力教授團隊研制,?魚(yú)通過(guò)利用頭部吸盤(pán)吸附在海龜、鯊魚(yú)、海豚、輪船等宿主身上,實(shí)現遠距離的游行,其頭部吸盤(pán)中有數以百萬(wàn)計的納米級纖毛與吸附體表面產(chǎn)生分之間作用力范德華力,使其在吸附于宿主體表時(shí)不會(huì )脫離。如圖1.8所示,該團隊對?魚(yú)的研究,利用軟體硅膠材料,結合?魚(yú)吸附力產(chǎn)生原理,研制了仿生?魚(yú)吸盤(pán),該吸盤(pán)能夠產(chǎn)生大于其本身重量340倍的吸附力。
由美國哈佛大學(xué)軟體機器人實(shí)驗室研制的仿海星軟體機器[18],如圖1.9所示,軟體仿海星機器人是由硅膠材料研制而成,通過(guò)對充氣和放氣過(guò)程的控制,能實(shí)現對仿生海星機器人的運動(dòng)的控制,仿海星機器人長(cháng)約為12.7厘米,有四只軟體觸手,通過(guò)四個(gè)軟體觸手實(shí)現爬行運動(dòng)。其運動(dòng)原理在于,軟體海星機器人是由兩種伸縮性不同硅膠結合制作而成,一種伸縮性較小的硅膠材料,和一種伸縮性較大的硅膠材料,伸縮性較小的硅膠材料作為仿海星機器人貼近桌面的軟體腳,而軀干部分和則是采用伸縮率較大的硅膠材料制作而成,在一側充氣時(shí)會(huì )向伸縮率低的一側傾斜,從而實(shí)現軟體觸角的前后擺動(dòng)為向前移動(dòng)提供動(dòng)力。

2014年AndrewD.Marchese等人研制了的仿生魚(yú)[19],在這項工作中他們設計了一個(gè)具有自主應急功能的軟體仿生機器魚(yú),如圖1.10所示,軟體仿生機器魚(yú)的體型與魚(yú)類(lèi)似,軟體外殼采用硅膠材料制作而成,內置有氣動(dòng)驅動(dòng)器和控制器。驅動(dòng)系統是通過(guò)氣壓驅動(dòng)尾部擺動(dòng),使其能像魚(yú)兒一樣在水中游動(dòng)。軟體機器魚(yú)不僅設計了簡(jiǎn)單的游動(dòng)模式,還設計了應急反應,這一生理反應需要快速的身體加速和連續的身體運動(dòng),對仿生機器魚(yú)整體協(xié)調性要求極高,而這一功能的實(shí)驗,也給予了仿生魚(yú)的自主完成探測任務(wù)的能力。

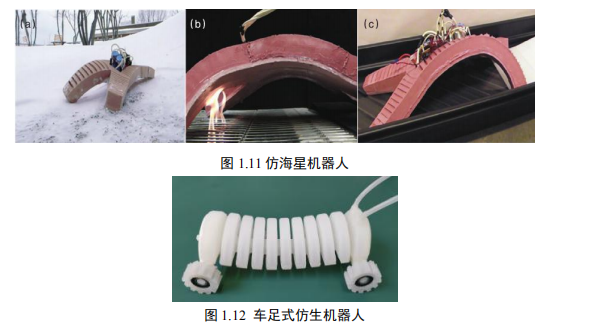
2014年,哈佛大學(xué)研制的一款仿海星機器人[20].如圖1.11所示此機器人由伸縮性大的硅膠材料制作而成,并通過(guò)電動(dòng)氣泵壓縮空氣提供動(dòng)力,其連續爬行續航高達2小時(shí),能夠經(jīng)受重物碾壓和撞擊,在極其惡劣的環(huán)境如高溫、高壓、有毒的環(huán)境中依然能夠持續作業(yè),十分適用于野外勘探。2018年由燕山大學(xué)姚建濤等人研制的車(chē)足式仿生機器人[21],如圖1.12所示,該機器人由高伸縮率的硅膠材料制作而成,機器人主體部分設計出多氣室結構,其作用在于多氣室結構能有效增大軸向伸展長(cháng)度,使軟體機器人在一個(gè)充放氣周期內移動(dòng)更大的距離,每個(gè)氣室被分割成左右兩氣室,通過(guò)在左右氣室充入不同壓強的氣壓實(shí)現軟體機器人的轉向功能,軟體機器人主體部分底部鑲嵌有彈簧,增加軟體機器人的回復能力,軟體機器人通過(guò)四個(gè)軟體車(chē)輪與桌面接觸,軟體車(chē)輪為單向轉動(dòng)車(chē)輪,為了增大與桌面的摩擦力,車(chē)輪生設計有皺褶結構。其運動(dòng)原理在于,充入氣體后,軟體機器人會(huì )軸向伸長(cháng),應軟體機器人車(chē)輪為向前單向轉動(dòng),所以軟體機器只能向前伸展,當氣體放出后,軟體機器開(kāi)始向前收縮,一個(gè)完整的運動(dòng)過(guò)程完成。
上述仿生機器人都是采用柔軟的硅膠材料制作而成,硅膠因其柔軟性、無(wú)毒性、優(yōu)良的伸縮性等特征,在研制仿生機器人時(shí)有其天然的優(yōu)勢,其柔軟性與大自然的生物體質(zhì)相似,無(wú)毒性不會(huì )對科研人員造成傷害,良好的伸縮性使其在發(fā)生形變后又能快速的回復。
1.5軟體機器手的發(fā)展現狀
與仿生軟體機器人不同之處在于,軟體機械手的作用主要應在抓取或輔助抓取領(lǐng),早在20世紀80年代便已經(jīng)開(kāi)始了。1989年,來(lái)自日本井岡山大學(xué)的鈴森康一研制了一款軟體四指機器人[22,23],如圖1.13所示,該機械手由四根手指組成,采用硅膠材料澆注而成,當軟體手指施加負壓時(shí),四根手指呈張開(kāi)形式,當手指充入正壓氣體后,能實(shí)現簡(jiǎn)單的抓取運動(dòng)。

2013年,來(lái)自哈佛大學(xué)的Pologcrinosctal等人,研制了一款可穿戴物理治療康復醫療輔助抓手[24],如圖1.14所示,該軟體輔助康復手由兩種硅膠配合研制而成,手指上面多氣室構造的硅膠層采用伸縮性大的硅膠制作而成,底層這是將伸縮性較小的硅膠嵌入在伸縮性小的硅膠材料中,在未完全凝固前,將多氣室層覆蓋凝固,形成多氣室的密閉結構的整體。其彎曲原理在于手指上層伸縮率高的硅膠材料在充入氣體后伸長(cháng)量會(huì )大于手指下層伸縮率低的硅膠材料,從而實(shí)現軟體手指的向伸縮率低的一側彎曲。軟體康復手可以用于偏癱患者手部物理治療,且康復軟體手自作簡(jiǎn)單成本低,極大的節約了人力成本。

2014年德國生物機器人實(shí)驗室的RaphaelDeimel和OliverBrock等人,開(kāi)發(fā)了一款軟體欠驅動(dòng)靈巧手[25].如圖1.15所示,欠驅動(dòng)及機械手動(dòng)力源少于其自由度,該手通過(guò)5個(gè)氣源,實(shí)現對人手15個(gè)自由度的大部分動(dòng)作。軟體欠驅動(dòng)靈巧手下圖所示,該靈巧手由硅膠材料制作而成,手指外表面由不能伸長(cháng)的凱夫拉線(xiàn)纏繞,約束手指的徑向膨脹。該手通過(guò)簡(jiǎn)單控制五個(gè)手指的氣源的輸入輸出,實(shí)現模仿人手的各種抓握方式,其大拇指還能實(shí)現與其他四指對指功能,該手只有大約重178克,而最大握取重量能達到0.5千克,通過(guò)實(shí)驗該手大約能實(shí)現人手所有的抓握方式約為33種。靈巧輕便的特點(diǎn)使該手在研制出來(lái)后就得到了廣泛的關(guān)注。

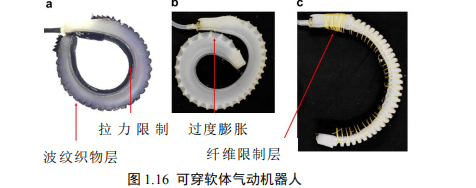
2015年新加坡國立大學(xué)YAPHONGKAI等人研制了可穿戴的軟體氣動(dòng)機器人[26-28].如圖1.16所示,該機器人的初代與哈佛大學(xué)所研制的康復醫療手外形類(lèi)似,軟體制動(dòng)器上有均勻分布的小氣室,但該制動(dòng)器運動(dòng)不符合人手指的運動(dòng)特征,在這基礎上該團隊研制了第二代的軟體驅動(dòng)器,與第一代制動(dòng)器不同的是,該團隊通過(guò)對人手指特征的研究,將均勻分布在軟體驅動(dòng)器上的小氣室,根據人手指指節的特長(cháng)進(jìn)行布置,從而使軟體驅動(dòng)器更加符合人手指的彎曲特征。但第二代可穿戴的軟體氣動(dòng)驅動(dòng)器也存在一定的問(wèn)題,為了使手指關(guān)節處產(chǎn)生足夠的彎曲,所以需要更大的氣壓驅動(dòng)二代軟體驅動(dòng)器,而分布在軟體驅動(dòng)器上的小氣室臂相對較薄,更大的氣壓導致制動(dòng)徑向膨脹過(guò)大,影響穿戴效果和美觀(guān);該團隊通過(guò)使用繞線(xiàn)方式來(lái)限制制動(dòng)器的徑向膨脹,但也在很大程度上影響了軟體啟動(dòng)器的彎曲角度;為了解決這一問(wèn)題,該團隊再軟體氣動(dòng)器頂部加入褶皺的纖維面料代替了繩索,底部添加了彈性面料,面料的包裹可以防止手指的徑向畸變,皺褶的面料設計對軟體啟動(dòng)器軸向的伸長(cháng)不會(huì )有任何的影響。
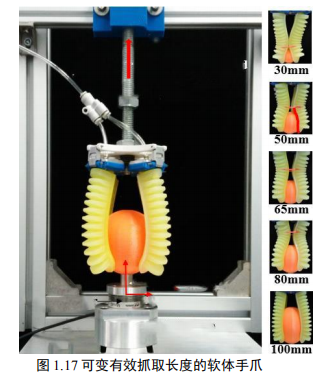
2016年北京航天航空大學(xué)文力教授團隊[29],研發(fā)了一款可變有效抓取長(cháng)度的軟體手爪,如圖1.17所示,該軟體手爪包括四個(gè)獨立的驅動(dòng)器,每個(gè)驅動(dòng)器上均勻分布有的小氣室,當充入壓縮氣體后,小氣室膨脹,其伸縮量大于驅動(dòng)器下表,所以會(huì )產(chǎn)生彎曲,驅動(dòng)器上的小氣室也會(huì )應為膨脹而相互擠壓,從而使軟體手爪產(chǎn)生更大的抓取力度。該軟體手通過(guò)用繩索束縛制動(dòng)器的抓取長(cháng)度來(lái)改變抓取的有效長(cháng)度,軟體手爪驅動(dòng)器在沒(méi)有被約束時(shí),最大穩定抓取直徑為100mm,當其軟體手被繩索約束后,其最小穩定抓取直徑為30mm.
2016年香港大學(xué)王正等人[30],研制了一款纖維增強軟體彎曲制動(dòng)器。如圖1.18所示,該團隊主要研究了通過(guò)使用纖維伸縮約束軟體機器人徑向膨脹,并研究了繞線(xiàn)圈數與軟體制動(dòng)器彎曲角度之間的關(guān)系。在17mm的制動(dòng)器上,將繞向圈數n分別設置為10、20、45進(jìn)行試驗,并得出當n=45時(shí),相同氣壓下軟體驅動(dòng)器彎曲角度最大,該團隊還通過(guò)仿真實(shí)驗,對n大于45時(shí)的情況進(jìn)行了仿真實(shí)驗,實(shí)驗結果顯示當n大于45后,在相同氣壓下軟體驅動(dòng)器的彎曲角度不會(huì )隨n的增大而增大。

2016年Tiziani,Lucas和Hart,Alexander等人,研制了一款模塊化可變剛度的輔助抓取手[31].與我們常見(jiàn)的輔助抓手佩戴在手背上不同,該輔助手佩戴在手腕上,與手掌相對,如圖1.19所示,該軟體輔助手包括三個(gè)手指,三個(gè)手指結構相同,且相互獨立,手指包括三個(gè)指節,近指段和中指段結構相同,包括兩個(gè)氣室,彎曲氣室和變剛度氣室,通過(guò)改變兩個(gè)氣室中氣壓的比例實(shí)驗軟體手指剛度的改變,遠指段采用可充氣的纖維半剛度材料,不會(huì )對人體造成傷害,同時(shí)又保證了一定的剛度。該輔助手總重量大約為500克,能輔助抓取233克的瓷質(zhì)水杯。但該輔助手變剛度結構的設計對軟體輔助手的彎曲力度有一定的制約,如下圖所示,變剛度氣室與彎曲氣室將手指節均分,要想實(shí)現彎曲的功能則彎曲氣室需要充入氣體,但為了改變手指的硬度,變剛度氣室也同樣需要充入氣體,變剛度氣室充入氣體后對手指彎曲會(huì )有反作用力,為了保持原有的彎曲角度,彎曲氣室就相應的施加更大的氣壓,但對整體的抓取力度有較大的影響。

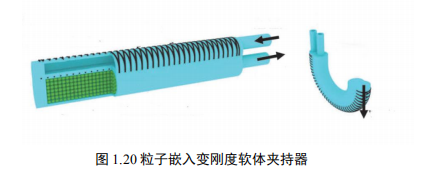
2016年香港大學(xué)陳永華等人研制了一種粒子嵌入變剛度軟體夾持器[32,33].改軟體機器人解決了有效的解決了軟體機器人研究中一直存在的問(wèn)題,軟體機器人剛性不足的問(wèn)題,在此之前也有類(lèi)似的研究,通過(guò)采用兩個(gè)氣室的結構來(lái)改變夾持器的剛度,這樣大大降低了軟體夾持器抓取力度。該軟體夾持器,如圖1.20所示,包括兩個(gè)氣室,其中一個(gè)氣室中加入固體顆粒物質(zhì),另一個(gè)氣室則是軟體夾持彎曲氣室。其變剛度原理是將加入固體顆粒的氣室中抽取空氣,使固體顆粒間產(chǎn)生相互擠壓,摩擦力增大,從而使軟體夾持器實(shí)現剛度的改變,該團隊通過(guò)實(shí)驗驗證,通過(guò)變剛度后的軟體夾持器剛度最大改變能達到10倍。2017年該團隊有進(jìn)一步改進(jìn)了變剛度結構,采用形狀記憶金屬材料(SMP)和導電熱塑體(TPU)材料組合物鑲嵌于軟體夾持器中,通過(guò)電熱塑體材料的加熱而是記憶金屬產(chǎn)生形變,通過(guò)對壓阻效應能夠獲得軟體夾持器的彎曲角度信息。
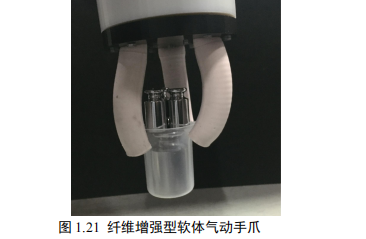
2017年來(lái)自上海交通大學(xué)機械系統與振動(dòng)國家重點(diǎn)實(shí)驗室的王天宇、魏樹(shù)軍、谷國迎等人研制了一款纖維增強型軟體氣動(dòng)手爪[34].如圖1.21所示,該軟體機器人手爪有三根相同手指組成,手指外部有纖維繩索包裹,限制其軸向的膨脹,手指只設計了一個(gè)彎曲氣室,并由一個(gè)氣源實(shí)現對三個(gè)手指的彎曲控制。手指長(cháng)75mm,手指呈半圓形,圓半徑為9mm,其抓取的最大口徑為60mm,最大抓取重量能達到0.8kg.
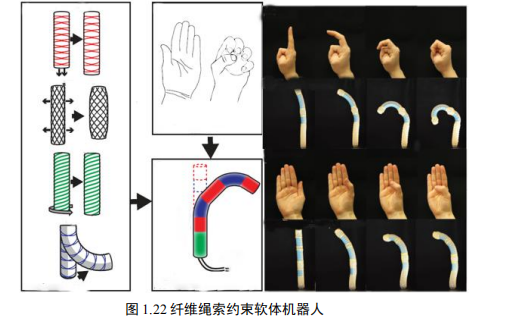
2017年哈佛大學(xué)的FionnualaConnolly等人研制了一種通過(guò)纖維繩索約束軟體機器人[35].該軟體機器人通過(guò)使用尼龍繩索束縛,如圖1.22所示,當繩索交叉密集纏繞時(shí),軟體機器人在氣壓的作用下會(huì )向軸伸展,當繩索交叉纏繞較稀疏時(shí),軟體機器人在氣壓的作用下會(huì )徑向膨脹,當軟體機器人上單向繞線(xiàn)時(shí),軟體機器人會(huì )軸向伸長(cháng)并發(fā)生一定角度的扭曲;當軟體機器人由伸縮率大和伸縮率所澆筑而成時(shí),使用交叉密集繞線(xiàn)方式就能使軟體手指實(shí)現彎曲,并能約束其徑向的膨脹。通過(guò)以上使用繩索約束軟體手指的運動(dòng),使其產(chǎn)生特定的運動(dòng)形式,該團隊將不同的繞線(xiàn)方式應用在同一軟體機器人上,從而使軟體機器人實(shí)現對人手指動(dòng)作的模仿,這樣設計的優(yōu)點(diǎn)在于,不需要通過(guò)設計更多的氣室來(lái)實(shí)現軟體機器人的側擺扭曲功能,大大降低了制作成本和控制難度。但該軟體機器人的制作工藝難度較大,主要原因在于彎曲結構的設計是由兩種硅膠分步澆注成型而成,非彎曲層則是由一種伸縮性大硅膠材料制做而成,所以制作仿人手指動(dòng)作的機器人需要制作多個(gè)成型模具相互配合成型,澆注難度大,成功率低。
膨脹,通過(guò)簡(jiǎn)單控制實(shí)現復雜的彎曲、扭曲運動(dòng)。目前軟體手抓的應用領(lǐng)域也主要用于偏癱患者的物理康復治療和特殊的抓取場(chǎng)景中。本文所研制的軟體擬人手,可以用于抓取,也可用于物理康復治療。該手的創(chuàng )新點(diǎn)在,于通過(guò)簡(jiǎn)單的控制實(shí)現模仿人手的抓取運動(dòng),通過(guò)改變手指的硬度以適應對不同重量的物體的抓取。
1.6主要研究?jì)热?/strong>
綜上所述,現階段擬人手的研究主要包括剛體和軟體機器人,剛體擬人手其控制精度高,抓取力度大,模型建立相對簡(jiǎn)單,但剛性機器人也存在柔性差、研制成本高等問(wèn)題。軟體機器人手相對于剛性機器人,其柔性大、研制成本低,但也存在剛度較差,對物體的抓取穩定性不足等缺陷。目前研制的軟體擬人機械手設計的獨立氣室較多,控制相對較為復雜。針對這一系列問(wèn)題本文研制的軟體擬人手只需要控制兩個(gè)氣源(一個(gè)正氣壓氣源,一個(gè)負氣壓氣源),控制較為簡(jiǎn)單,還能通過(guò)對變剛度氣室施加負氣壓,改變手指的剛度,同時(shí)手指還能模仿人手的抓取方式,對物體的抓取更加穩定。具體研究?jì)热萑缦拢?/p>
(1)軟體擬人機械手總體設計。軟體擬人機械手設計思路是來(lái)自于對人手外型和抓取動(dòng)作的模仿,以此為基礎,設計了軟體擬人手。其主要特點(diǎn)包括控制簡(jiǎn)單、模仿人手抓取、實(shí)現變剛度等。軟體手的各個(gè)組成部件,主要包括兩類(lèi)兩類(lèi)手指大拇指與其他四指,對它們做了詳盡的介紹,并分析了各自的特點(diǎn)。
(2)軟體擬人機械手基于有限元分析的參數優(yōu)化。對制作軟體擬人手的材料進(jìn)行理論計算和拉伸實(shí)驗,得出了個(gè)材料的力學(xué)性能參數,為后面軟體手指的仿真實(shí)驗做準備。對不同壁厚彎曲層做了對比試驗,在考慮到實(shí)際的應用后,得出了相應的結論;對軟體手指彎曲層氣室不同半徑做了對比實(shí)驗。在仿真實(shí)驗中為探究不同材料對軟體手指的彎曲效果的影響,設計了相應的實(shí)驗,在其他參數不變的前提下,軟體手指彎曲層材料對其彎曲角度和抓取力度都有很大的影響,所以選擇最佳出的混合比例,也是軟體手能否達到預期的抓取力的重要因素。
(3)軟體擬人機械手電路設計以及抓取實(shí)驗研究。設計相應實(shí)驗,獲得軟體擬人手其它四指的氣壓與指根彎曲角度關(guān)系實(shí)驗數據,與有限元分析數據進(jìn)行對比;設計實(shí)驗對軟體擬人手機器人的其它四指與大拇指指尖壓力進(jìn)行了測定;設計實(shí)驗獲得大拇指與其它四指變剛度氣室在不同負壓下,軟體手指指尖承重的相關(guān)數據;通過(guò)設計實(shí)驗獲得了大拇指扭曲角度相關(guān)數據。最后對軟體擬人機械手進(jìn)行總體測試,包括有效抓取半徑測試,最大抓取重量測試,以及變剛度性能測試等。

第 2 章 軟體擬人機械手總體設計
2.1 人手的結構分析
2.2 軟體擬人手機械手設計
2.2.1 軟體擬人手整體設計
2.2.2 軟體擬人機械手大拇指設計
2.2.3 軟體擬人機械手其它四指的設計
2.2.4 軟體擬人機械手掌設計
2.2.5 軟體擬人機械手掌骨架設計
2.2.6 軟體手氣管的線(xiàn)路與架構設計
2.2.7 設計中遇到的問(wèn)題及解決方法
2.3 軟體擬人機械手成型工藝
2.4 本章小結
第 3 章 軟體擬人機械手基于有限元分析的參數優(yōu)化
3.1 硅膠材料性能參數研究
3.2 硅膠材料力學(xué)性能測試實(shí)驗
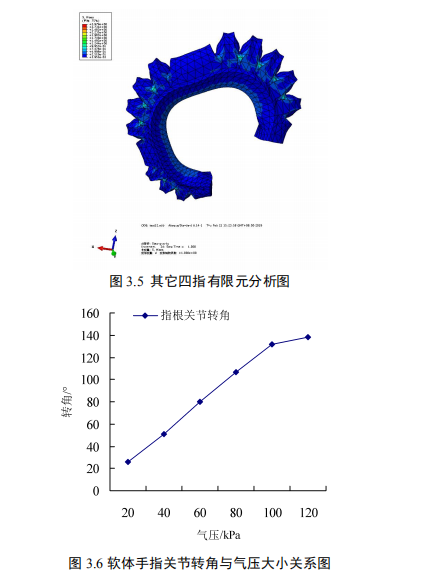
3.3 其他四指彎曲層有限元分析
3.4 結構參數與材料對軟體手指性能的影響
3.4.1 軟體手指彎曲層壁厚對指根關(guān)節彎曲角度的影響
3.4.2 軟體手指彎曲層氣室半徑對指根關(guān)節彎曲角度的影響
3.4.3 不同硅膠材料混合對彎曲層指根關(guān)節彎曲角度的影響
3.5 本章小結
第 4 章 軟體擬人手控制以及抓取實(shí)驗研究
4.1 軟體擬人手控制電路設計
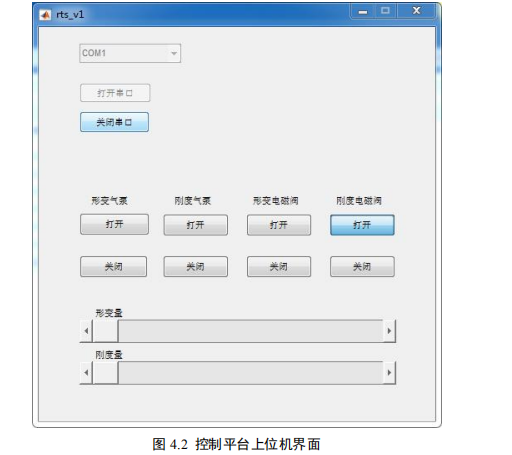
4.1.1 軟體擬人機械手控制平臺的搭建
4.1.2 氣動(dòng)元器件簡(jiǎn)介
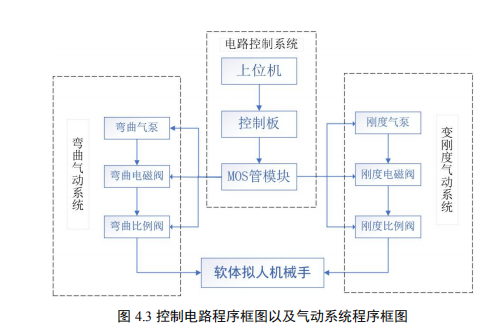
4.1.3 氣動(dòng)系統及控制電路
4.2 其它四指彎曲以及指尖壓力實(shí)驗研究
4.3 其它四指變剛度對指尖力的影響實(shí)驗研究
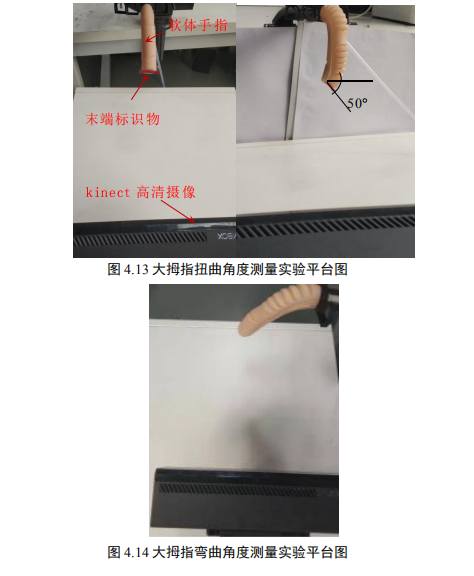
4.4 軟體手大拇指彎曲、扭曲及指尖壓力實(shí)驗研究
4.5 大拇指變剛度對指尖力的影響實(shí)驗研究
4.6 軟體機器人擬人手的抓取實(shí)驗研究
4.6.1 軟體擬人手抓取實(shí)驗
4.6.2 軟體擬人機械手抓取直徑實(shí)驗研究
4.6.3 變剛度對軟體擬人機械手抓取重量的影響實(shí)驗研究
4.7 本章小結
總結與展望
隨著(zhù)中國制造2025戰略的提出,工業(yè)自動(dòng)化、生產(chǎn)智能化已經(jīng)逐步取代傳統的生產(chǎn)方式,也是工業(yè)生產(chǎn)的大勢所趨,隨著(zhù)用于制作機器人本體的材料越來(lái)越多樣化,本文所研究的軟體擬人手機器人,就是采用較為新穎的硅膠材料制作而成。硅膠材料因其柔軟性,軟體手在抓取易損壞的物體時(shí),不會(huì )對該物體造成破壞,在抓取不規則物體時(shí),有很多好的適應性軟體機器人應用領(lǐng)域也有很多,包括康復醫療、仿生機器人、人體假肢、野外勘探等方面,而本文所研究得軟體擬人機械手,就屬于仿生機器或人體假肢方面的應用,該軟體手針對人手抓取特點(diǎn),設計出了能模仿人手指抓取動(dòng)作的軟體機器人手,并對其結構特點(diǎn)、工藝過(guò)程做了詳盡的描述。以有限元分析結果為依據,制作出了軟體擬人機械手。軟體擬人機械手的抓取實(shí)驗,獲得了軟體擬人手相關(guān)數據。具體工作及結論如下:
(1)軟體擬人機械手設計思路是來(lái)自于對人手外型和抓取動(dòng)作的分析,而設計的軟體擬人手,它包括四根其它四指、大拇指、手掌骨架、手掌、以及氣管,其中其它四指、大拇指和手掌由硅膠材料制作而成,手指骨架則是采用的3D打印材料制作而成。軟體擬人機械手主要特點(diǎn)包括控制簡(jiǎn)單、模仿人手抓取、實(shí)現變剛度、適應性抓取等。其它四指有三個(gè)指節,指關(guān)節處彎曲層上分布有水平的小氣室,用以增強手指彎曲力度,其它四指的結構包括三層兩個(gè)氣室,彎曲氣室和變剛度氣室,彎曲氣室控制軟體手指的彎曲,變剛度氣室控制軟體手指的剛度,變剛度層中加入的固體顆粒是能否實(shí)現變感度的關(guān)鍵,變剛度層上設計有相對應的凹槽,配合手指的彎曲。大拇指的設計與其它四指大致相同,由三層硅膠組合而成,但大拇指只有兩個(gè)指節,彎曲層上小氣室分布不同于其它四指的水平分布,而是與手指徑向呈30度的傾斜角度,這樣的設計可以使大拇指在彎曲的同時(shí)實(shí)現一定角度的側擺,模仿人手大拇指抓取時(shí)的彎曲動(dòng)作,也使得軟體手各手指間彎曲氣室串聯(lián)成為可能。
(2)對制作軟體擬人機械手的硅膠材料進(jìn)行拉伸實(shí)驗和理論計算,得出了不同混合比例材料的力學(xué)性能參數,為后面軟體手指的有限元分析做準備。在其他參數不變的前提下,軟體手指彎曲層壁厚越厚,軟體手指指根關(guān)節彎曲角度隨氣壓的變化越小,但并不是壁厚越小彎曲度越大,軟體手指的性能就越好,還要結合實(shí)際情況;在其他參數不變的前提下,通過(guò)有限元分析,我們獲得了軟體手指半徑的最優(yōu)取值。按不同比例混合可以獲得不同伸縮率和硬度的混合硅膠材料,使用有限元分析探究了不同混合比例硅膠材料性能對軟體手彎曲角度的影響,得出軟體手指彎曲層材料對其彎曲角度和抓取力度都有很大的影響,通過(guò)對有限元分析的結果以及考慮實(shí)際應用情況,我們得出了最佳的混合比例。
(3)介紹了軟體手的控制電路,并能使用上位機對軟體手進(jìn)行抓握控制。其它四指的做了氣壓與指根彎曲角度關(guān)系實(shí)驗,獲得的實(shí)驗數據與有限元分析實(shí)驗數據基本吻合;
軟體擬人機械手設計對軟體擬人手機器人的其它四指與大拇指指尖壓力進(jìn)行了測定。通過(guò)對比0kPa時(shí)的變剛度氣室與-70kPa時(shí)實(shí)驗數據,得出了變剛度結構對軟體手指剛度有明顯提升的結論。通過(guò)軟體擬人機械手抓取實(shí)驗測試,獲取了軟體手的有效抓取范圍;做了軟體手擬人機械手在不同剛度抓取重量的對比實(shí)驗,獲得了在不同剛度下的最大抓取重量,驗證了變剛度機構的有效性。
綜上所述本文從軟體手設計的思路出發(fā),分別設計了其它四指和大拇指,并對軟體手指進(jìn)行了參數優(yōu)化以及有限元分析,在仿真分析的基礎上制作了軟體擬人手,并對軟體擬人手做了相應的實(shí)驗,測試軟體擬人機械手的性能。但該篇論文所設計的軟體手依然存在不足之處,具體如下。
(1)在軟體手結構設計方面,手指結構設計雖然已經(jīng)得到了優(yōu)化,但軟體手抓取重量相對于剛性機器人仍然有很大差距,縮小這一差距的可以通過(guò)設計更加合理的軟體結構,以及嘗試更加適合的硅膠材料兩個(gè)方面來(lái)考慮。
(2)在軟體手控制方面,本文中所研制的軟體手在控制方面與人手最大的差別在于沒(méi)有反饋控制,這也是軟體手研究的一個(gè)重要方向,目前有清華大學(xué)李教授所研制的光電傳感為軟體機器人手[50],反饋控制提供了有效的解決方案,也是我們團隊下一代軟體手中使用的反饋控制方案。(3)在軟體手外觀(guān)構造方面,目前研制的軟體擬人手外形與人手還存在一定的差距,可以進(jìn)一步美化軟體手的外形。在尺寸方面軟體手目前研制的軟體手與人手比例為1.2:1,還需要進(jìn)一步縮小尺寸。
參考文獻
[1] 王田苗。 工業(yè)機器人發(fā)展思考[J]. 機器人技術(shù)與應用, 2004(2):1-4.
[2] 姜力。 具有力感知功能的機器人靈巧手手指及控制的研究[D]. 2001.
[3] 張佳帆。 基于柔性外骨骼人機智能系統基礎理論及應用技術(shù)研究[D]. 浙江大學(xué), 2009.
[4] 蔡自興。 機器人學(xué)基礎[M]. 機械工業(yè)出版社, 2009.
[5] Kier W M , Smith K K . Tongues, tentacles and trunks : the biomechanics of movement in muscular-hydrostats[J]. Zoological Journal of the Linnean Society, 2010, 83(4):307-324.
[6] 姜力, 蔡鶴皋, 劉宏。 新型集成化仿人手指及其動(dòng)力學(xué)分析[J]. 機械工程學(xué)報, 2004, 40(4)。 [7] Amputee Coalition of America's National Limb Loss Information Center (NLLIC) [8] "The Utah Arm", www.utaharm.com, January 2009.
[9] 樊紹巍。 類(lèi)人型五指靈巧手的設計及抓取規劃的研究[D]. 哈爾濱工業(yè)大學(xué)。
[10] 張喬飛。 人手運動(dòng)特征分析與機械實(shí)現[D]. 華中科技大學(xué), 2015.
[11] Cecilialaschi, Matteocianchetti, Barbaramazzolai, et al. Soft robot arm inspired by the octopus[J]. Advanced Robotics, 2012, 26(7): 709 -727.
[12] Zheng T, Branson D T, Guglielmino E, et al. Model validation of an octopus inspired continuum arm model and prototype for use in underwater robots[J]. Journal of Mechanisms & Robotics, 2012, 5(2): 021004.
[13] Kang R, Branson D T, Guglielmino E, et al. Dynamic modeling and control of an octopus inspired multiple continuum arm robot[J]. Computers & Mathem atics with Applications, 2012, 64(5): 1004-1016.
[14] Lin H T, Leisk G G, Trimmer B. Go QBot: a caterpillar-inspired soft-bodied rolling robot[J]. Bioinspir Biomim, 2011, 6(2): 026007.
[15] Seok S, Onal C D, Cho K J, et al. Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(5): 1485-1497.
[16] 李磊,文力,王越平,等。仿生軟體吸附機器人:從生物到仿生。 中國科學(xué): 技術(shù)科學(xué), 2018, 48: 1275–1287
[17] Li L, Wen L, Wang Y P, et al. Biomimetic soft adhesion robot: From biology to bionics (in Chinese)。 Sci Sin Tech,2018, 48: 1275–1287, doi: 10.1360/N092018-00176
[18] Shepherd R F , Ilievski F , Choi W , et al. From the Cover: Multigait soft robot[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51):20400.
[19] Marchese A D , Onal C D , Rus D . Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators[J]. Soft Robotics, 2014, 1(1):75-87. [20] Tolley M T, Shepherd R F, Mosadegh B, et al. A resilient, untethered soft robot[J]. Soft Robot, 2014, 1(3): 213-223.
[21] 姚建濤, 陳新博, 陳俊濤, et al. 輪足式仿生軟體機器人設計與運動(dòng)分析[J]. 機械工 程學(xué)報, 2019, 55(5):27-35.
[22] Suzumori K. Flexible microactuator : 1st report, static characteristics of 3 DOF actuator[J]. Transactions of the Japan Society of Mechanical Engineers, 1989, 55(518): 2547-2552.
[23] Suzumori K. Flexible microactuator : 2nd report, dynamic characteristics of 3 DOF actuator[J]. Transactions of the Japan Society of Mechanical Engineers C, 1990, 56(527): 1887-1893.
[24] Udupa G , Sreedharan P , Aditya K . Robotic gripper driven by flexible microactuator based on an innovative technique[C]// Advanced Robotics & Its Social Impacts. IEEE, 2010.
[25] Deimel R , Brock O . A novel type of compliant and underactuated robotic hand for dexterous grasping[M]. Sage Publications, Inc. 2016.
[26] Yap H K , Lim J H , Nasrallah F , et al. Characterisation and evaluation of soft elastomeric actuators for hand assistive and rehabilitation applications[J]. Journal of Medical Engineering & Technology, 2016:1-11.
[27] Yap H , Kamaldin N , Lim J , et al. A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging[J]. IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2016, PP(99):1-1.
[28] Yap H K , Lim J H , Nasrallah F , et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness[C]// IEEE International Conference on Robotics & Automation. IEEE, 2015.
[29] Hao Y , Gong Z , Xie Z , et al. Universal soft pneumatic robotic gripper with variable effective length[C]// Control Conference. IEEE, 2016.
[30] Wang Z , Polygerinos P , Overvelde J T B , et al. Interaction Forces of Soft Fiber Reinforced Bending Actuators[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2):717-727.
[31] Tiziani, L., Hart, A., Cahoon, T., Wu, F., Harry Asada, H., & Hammond, F. L. (2017)。 Empirical characterization of modular variable stiffness inflatable structures for supernumerary grasp-assist devices. The International Journal of Robotics Research, 36(13–14), 1391–1413. https://doi.org/10.1177/0278364917714062
[32] YWei Y, Chen Y, Ren T, et al. A novel, variable stiffness robotic gripper based on integrated soft actuating and particle jamming[J]. Soft Robot, 2016, 3(3): 134-143.
[33] Yang Y, Chen Y, Li Y, et al. Novel variable-stiffness robotic fingers with built-in position feedback[J]. Soft Robot, 2017, 4(4): 338 -352.
[34] 魏樹(shù)軍, 王天宇, 谷國迎。 基于纖維增強型驅動(dòng)器的氣動(dòng)軟體抓手設計[J]. 機械工 程學(xué)報, 2017(13)。
[35] Connolly F , Walsh C J , Bertoldi K . Automatic design of fiber-reinforced soft actuators for trajectory matching[J]. Proceedings of the National Academy of Sciences, 2017, 114(1):51-56
[36] Wang Z H , Zhang L B , Bao G J , et al. Design and control of integrated pneumatic dexterous robot finger[J]. 中南大學(xué)學(xué)報:英文版, 2011, 18(4):1105-1114.
[37] Feix T, Pawlik R, Schmiedmayer H B, et al. A comprehensive grasp taxonomy[C]//Robotics, science and systems: workshop on understanding the human hand for advancing robotic manipulation. 2009, 2(2.3): 2.3.
[38] Global Immersion Summer Program Soft Robotic Prosthetic Hand for Amputees [EB/OL].http://softroboticstoolkit.com/book/case-study-soft-robotic-prosthetic-hand-am putees-fr. 2014-04-21.
[39] 肖宇。 氣動(dòng)軟體機械手設計及實(shí)驗研究[D]. 2016. [40] 黃建龍, 解廣娟, 劉正偉。 基于 Mooney-Rivlin 和 Yeoh 模型的超彈性橡膠材料有限 元分析[J]. 橡塑技術(shù)與裝備, 2008, 34(12):22-26.
[41] 周相榮, 王強, 王寶珍。 一種基于Yeoh函數的非線(xiàn)性粘超彈本構模型及其在沖擊仿 真中的應用[J]. 振動(dòng)與沖擊, 2007, 26(5):33-37.
[42] 李樹(shù)虎, 賈華敏, 李茂東, et al. 超彈性體本構模型的理論和特種試驗方法[J]. 彈性 體, 2011, 21(1):58-64.
[43] 劉浩亮。 硅橡膠介電彈性體復合材料的制備與性能研究[D]. 北京化工大學(xué), 2012.
[44] 任全彬, 蔡體敏, 安春利, et al. 硅橡膠"O"形密封圈 Mooney-Rivlin 模型常數的確定 [J]. 固體火箭技術(shù), 2006, 29(2)。
[45] 賈玉璽, 孫勝, 劉莉莉, et al. 模具硅橡膠材料熱硫化工藝的有限元模擬[J]. 化工學(xué) 報, 2003, 54(9):1300-1304.
[46] 朱明 , 宋滿(mǎn)華 . 扁平橡膠密封結構對比及有限元分析[J]. 失效分析與預防, 2018.
[47] 李曉芳, 楊曉翔。 橡膠材料的超彈性本構模型[J]. 彈性體, 2005, 15(1)。
[48] Debotton G , Hariton I , Socolsky E A . Neo-Hookean fiber-reinforced composites in finite elasticity[J]. Journal of the Mechanics and Physics of Solids, 2006, 54(3):533-559.
[49] 王偉, 鄧濤, 趙樹(shù)高。 橡膠 Mooney-Rivlin 模型中材料常數的確定[J]. 特種橡膠制品, 2004, 25(4):8-10.
[50] Zhao H, O'Brien K, Li S, et al. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides[J]. Sci. Robot., 2016, 1(1): eaai7529.
致 謝
在此論文即將完成之際,我不禁思緒萬(wàn)千。研究生期間的學(xué)習生活一幕幕浮現在我 的腦海里,使我心情久久不能平復,只能用簡(jiǎn)單的言語(yǔ)表達我此時(shí)的心情。
首先,我想向鄢銼老師和陳文銳老師表示衷心的感謝!本文是在鄢銼老師和陳文銳 老師的督促指導下完成的。感謝鄢老師在學(xué)習生活中的指導和幫助,鄢老師為人和善, 在教學(xué)方面一絲不茍,當我在學(xué)習生活中遇到困難向鄢老師請教時(shí),鄢老師總是在第一 時(shí)間提供積極有效的幫助。感謝陳老師的信任,在決定研究方向的時(shí)候給予我指引,使 我有機會(huì )去投入到相關(guān)領(lǐng)域的研究中,并在我迷茫時(shí)給予我很多指導和幫助。陳老師踏 實(shí)、嚴謹、實(shí)事求是的工作作風(fēng)讓我敬佩不已,他對我的嚴格要求也讓我在生活和科研 中都受益匪淺。同時(shí)也感謝滕瑞品高工在我實(shí)習過(guò)程中給予我的指導和幫助。
感謝趙露師姐和張榮華師兄的幫助,他們對待學(xué)術(shù)的態(tài)度和豐富的科研經(jīng)驗對我有 深遠的影響;感謝碩士研究生趙子龍、魯靖文、沈李婷、梁兆凱、秦超、張鵬、劉輝、 韓旭、駱淑萍、凌斌、蘇玉龍等在工作和生活上的給予的建議與支持,也因為他們,使 我的研究生生活豐富多彩;同時(shí)也感謝王建發(fā)師弟和肖志蘭師妹在實(shí)驗中給予我的幫 助。感謝父母、姐姐及親朋好友們對我的關(guān)心與支持,在我課題遇到困難時(shí),是他們的 勸說(shuō)與開(kāi)導讓我堅定信念,繼續前行。
最后,感謝母校湖南大學(xué)對我的培養,感謝母校提供的良好的工作學(xué)習條件,這些 都是我能完成課題研究的重要保證。
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)