24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
玉米是我國主要糧食作物之一,其不僅可供人們食用,同時(shí)還大量被用作畜牧飼料和工 業(yè)生產(chǎn),因此保障玉米產(chǎn)量對于發(fā)展畜牧業(yè)和工業(yè)都具有非常重要的意義.田間草害是導致 玉米產(chǎn)量下降主要因素之一,相關(guān)研究表明,嚴重的草害可使玉米產(chǎn)量下降 50%以上.
目前,我國主要除草方法有人工除草、化學(xué)除草、機械除草等.人工除草勞動(dòng)強度大、 效率低,只有極少部分地區采用人工除草方法.化學(xué)除草效率高、節省人力,是目前主流的 除草方法,但化學(xué)除草方法有效控制雜草的同時(shí)也產(chǎn)生諸多不良影響,如大量反復使用除草 劑使田間雜草產(chǎn)生抗藥性、嚴重污染農田環(huán)境、農藥殘留威脅人們飲食健康等.近年來(lái)隨著(zhù) 人們環(huán)保意識的不斷增強,機械除草逐漸受到人們的重視,機械除草具有除草效率高、對環(huán) 境污染小等優(yōu)點(diǎn),因此開(kāi)展機械除草相關(guān)研究具有重要意義.
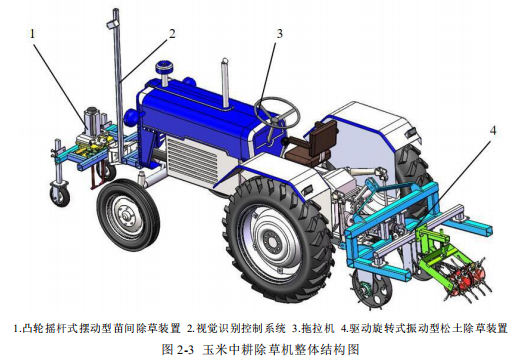
本文在分析現有機械除草技術(shù)基礎上,針對我國機械除草裝置研究存在的不足,結合粘 重土壤作業(yè)環(huán)境和玉米壟作種植特點(diǎn),采用優(yōu)化設計方法分別設計了凸輪搖桿式擺動(dòng)型苗間 除草裝置和驅動(dòng)旋轉式振動(dòng)型松土除草裝置,將理論分析、虛擬樣機設計、軟件仿真、土槽 試驗優(yōu)化等多種方法相結合,使設計出的除草裝置性能達到最優(yōu),研究的主要內容和結論如下:
(1)玉米機械除草裝置樣機設計
對玉米小壟種植壟型尺寸及玉米苗物理參數進(jìn)行測定,根據測定結果對玉米機械除草裝 置樣機進(jìn)行設計,該樣機可一次性完成中耕除草、松土作業(yè).
(2)凸輪搖桿式擺動(dòng)型苗間除草裝置設計與分析
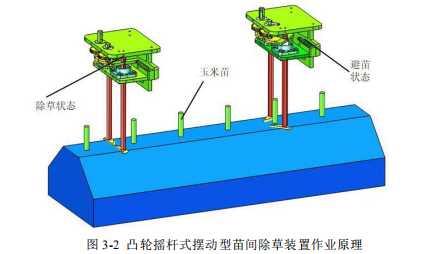
針對現有中耕機作業(yè)時(shí)苗間除草效率低、傷苗率高等問(wèn)題,設計了凸輪搖桿式擺動(dòng)型苗 間除草裝置,通過(guò)凸輪搖桿機構的設計將電機的連續轉動(dòng)轉換為除草刀的往復擺動(dòng),從而達 到除草不傷苗的目的.闡述了苗間除草裝置的主要結構和工作原理,通過(guò)建立和分析除草刀 避苗運動(dòng)軌跡數學(xué)模型,優(yōu)化除草裝置避苗運動(dòng)軌跡,并在此基礎上對凸輪搖桿式擺動(dòng)型苗 間除草裝置的關(guān)鍵部件除草刀、凸輪搖桿機構和彈簧等進(jìn)行設計.應用 ADAMS 軟件對凸輪 搖桿式擺動(dòng)型苗間除草裝置的運動(dòng)狀態(tài)進(jìn)行模擬,得到不同運動(dòng)參數下除草裝置的避苗運動(dòng) 軌跡,分析運動(dòng)參數對除草裝置避苗軌跡的影響.同時(shí)為探究凸輪搖桿式擺動(dòng)型苗間除草裝 置最優(yōu)運動(dòng)參數組合,以凸輪軸轉速、機器前進(jìn)速度為試驗因素,覆蓋率和入侵率為試驗指 標,采用多因素二次正交旋轉組合設計試驗方法,進(jìn)行虛擬試驗研究.結果表明:當凸輪軸 轉速 830deg/s、機器前進(jìn)速度 813mm/s 時(shí),其覆蓋率為 92.9%、入侵率為 2.9%,此時(shí)的除草 裝置運動(dòng)軌跡最優(yōu).應用 ANSYS Workbench 軟件對凸輪搖桿式擺動(dòng)型苗間除草裝置的除草 刀進(jìn)行有限元靜力學(xué)分析,結果表明轉動(dòng)中心孔為除草刀薄弱部位,為防止作業(yè)過(guò)程中出現 應力、應變集中等問(wèn)題,本文為左、右除草刀各設計了一個(gè)刀座,同時(shí)適當增加除草刀的厚 度,以期盡量減小應力、應變集中.
(3)凸輪搖桿式擺動(dòng)型苗間除草裝置試驗研究
為探究凸輪搖桿式擺動(dòng)型苗間除草裝置的實(shí)際作業(yè)性能,以前進(jìn)速度、彈簧剛度和除草 刀轉速為試驗因素,以除草率、傷苗率為試驗指標,進(jìn)行正交試驗研究,同時(shí)以最優(yōu)水平組 合進(jìn)行驗證及對比試驗.正交試驗結果表明:作業(yè)速度和除草刀轉速對除草率和傷苗率影響 均為顯著(zhù),彈簧剛度對除草率和傷苗率影響為極顯著(zhù),凸輪搖桿式擺動(dòng)型苗間除草裝置的最 優(yōu)組合為:彈簧剛度 60N/mm、前進(jìn)速度 0.6m/s、除草刀轉速 130r/min;驗證及對比試驗結 果表明,除草裝置的除草率為 89.8%,傷苗率為 2.1%,所設計的凸輪搖桿式擺動(dòng)型苗間除草 裝置的作業(yè)性能優(yōu)于傳統苗間除草機.
(4)驅動(dòng)旋轉式振動(dòng)型松土除草裝置設計與分析
針對現有旋轉中耕機作業(yè)時(shí)存在除草、碎土效果差,作業(yè)功耗大等問(wèn)題,設計了驅動(dòng)旋 轉式振動(dòng)型松土除草裝置,凸輪軸、彈簧等部件的設計使該型除草裝置作業(yè)時(shí)除草刀柔性振 動(dòng)切割土壤和雜草,增強碎土性能的同時(shí)降低其作業(yè)功耗.闡述并分析了驅動(dòng)旋轉式振動(dòng)型 松土除草裝置的結構組成和工作原理,并對其作業(yè)機理進(jìn)行理論分析.通過(guò)除草裝置的運動(dòng) 數學(xué)模型建立、除草刀切削土壤阻力分析和除草裝置減阻機理分析,得到影響裝置作業(yè)效果 的主要因素為機器前進(jìn)速度、彈簧剛度和刀輥轉速.根據理論分析結果,對驅動(dòng)旋轉式振動(dòng) 型松土除草裝置的除草刀、凸輪軸、外輥筒、彈簧等關(guān)鍵部件進(jìn)行尺寸設計.應用 ADAMS 軟件模擬裝置的運動(dòng)軌跡,驗證理論分析結果.應用 ANSYS Workbench 軟件對驅動(dòng)旋轉式 振動(dòng)型松土除草裝置的輥筒進(jìn)行模態(tài)分析,以防止共振發(fā)生,模態(tài)分析結果表明系統激振頻 率遠小于輥筒的固有頻率,發(fā)生共振可能性不大.
(5)驅動(dòng)旋轉式振動(dòng)型松土除草裝置試驗研究
為了研究驅動(dòng)旋轉式振動(dòng)型松土除草裝置作業(yè)性能,在室內土槽分別進(jìn)行單因素、多因 素、對比試驗,以期得到最優(yōu)作業(yè)參數組合.以機器前進(jìn)速度、刀輥轉速及彈簧鋼度為試驗 因素,作業(yè)功耗、碎土率、除草率為性能指標進(jìn)行試驗研究,結果表明:各因素對作業(yè)功耗 影響貢獻率由大到小依次為刀輥轉速、機器前進(jìn)速度、彈簧剛度,對碎土率影響的貢獻率由 大到小依次為彈簧剛度、刀輥轉速、機器前進(jìn)速度,對除草率影響的貢獻率由大到小依次為 彈簧剛度、刀輥轉速、機器前進(jìn)速度;最優(yōu)參數組合為刀輥轉速 241~259r/min、機器前進(jìn)速 度 0.5~0.8m/s、彈簧剛度 10.42~12.16N/mm,作業(yè)功耗范圍為 1.89~2.0kW、碎土率范圍為 92.9%~93.4%,除草率范圍為 86.7%~88.5%.在室內土槽進(jìn)行驗證和對比試驗,結果表明驅 動(dòng)旋轉式振動(dòng)型松土除草裝置的作業(yè)性能優(yōu)于傳統旋轉鋤式中耕除草裝置.田間試驗表明, 當刀輥轉速為 251r/min、機器前進(jìn)速度為 0.5m/s、彈簧剛度為 10.5N/mm 時(shí),測得其除草率 為 88.1%,碎土率為 92.8%,作業(yè)功耗為 2kW.所設計的驅動(dòng)旋轉式振動(dòng)型松土除草裝置的 作業(yè)性能滿(mǎn)足中耕機的作業(yè)要求.
關(guān)鍵詞:壟作玉米;中耕機;機械除草;試驗研究
Abstract
Maize is one of the main food crops in China. It is not only edible for people, but also used in animal feed and industrial production. Therefore, ensuring corn production is of great significance for the development of animal husbandry and industry. Field grass damage is one of the main factors leading to the decline of corn yield. Relevant research shows that severe grass damage can reduce corn yield by more than 50%.
At present, the main methods of weeding in China include manual weeding, chemical weeding, and mechanical weeding. Manual weeding is labor intensive and inefficient, and only a few areas use manual weeding methods. The chemical weeding machine has high efficiency and saves manpower. It is the current mainstream weeding method, but the chemical weeding method effectively controls the weeds and also has many adverse effects. For example, repeated use of herbicides makes the field weeds resistant and seriously pollutes the farmland environment. Pesticide residues threaten people's diet and health. In recent years, with the increasing awareness of environmental protection, mechanical weeding has gradually attracted people's attention. Mechanical weeding has the advantages of high herbicidal efficiency and low environmental pollution. Therefore, research on mechanical weeding is of great significance.
Based on the analysis of the current research status of mechanical weeding technology , this paper designs the cam rocker swing Intra-row weeding device and driving rotary vibration type weeding device according to different soil environments. Combining theoretical analysis, virtual prototype design, software simulation, test optimization and other methods to optimize the performance of the designed weeding device, the main content of the research and conclusion as below:
(1)Prototype design of corn mechanical weeding device
The ridge size of corn ridge planting and the physical parameters of corn seedlings were measured. According to the measurement results, the corn machinery weeding device prototype was designed. The prototype can complete the cultivating and weeding and loosening operations at one time.
(2)Design and operation mechanism of cam rocker swing
Intra-row weeding device Aiming at the problem of low efficiency of weeding and the high rate of seedling injury in the operation of existing cultivators, combined with the characteristics of small ridge planting of corn, a cam rocker swing intra-row weeding device was designed. The core working part of the device is the cam rocker mechanism. The design of this mechanism will be The continuous rotation of the motor is converted into the reciprocating swing of the weeding knife, so as to achieve the purpose of weeding and not hurting the seedling; the paper studies the structure and working principle of cam rocker swing intra-row weeding device, and establishes the path of the weeding knife avoiding seedlings. The mathematical model analyzes and optimizes the model to obtain the optimal trajectory of avoiding seedlings. Based on this, the key components of the cam rocker type oscillating intelligent intra-row weeding device are designed. The key components are mainly designed with weeding knives,Cam rocker mechanism design and spring design. The motion state of the cam rocker swing intra-row weeding device was simulated by ADAMS software. The trajectory of the seedling movement of the weeding device under different motion parameters was obtained, and the influence of the motion parameters on the shape of the weeding device was analyzed. At the same time, in order to explore the optimal motion parameter combination of the cam rocker swing intra-row weeding device, the cam shaft speed and the machine forward speed are used as test factors, the coverage rate and the intrusion rate are the test indicators, and the multi-factor quadratic orthogonal rotation combination design is adopted. The test method was applied to the virtual test study using ADAMS software. The results show that when the cam shaft speed is 830deg/s and the machine forward speed is 813mm/s, the coverage is 92.9% and the intrusion rate is 2.9%. The motion track of the weeding device is optimal. The ANSYS Workbench software was used to perform finite element static analysis on the weed cutter of the cam rocker swing intra-row weeding device to further optimize its structure. The static analysis results show that the rotating center hole is the weak part of the weeding knife, in order to prevent the operation process. The weeding knife has problems such as stress and strain concentration. In this paper, a knife seat is designed for each of the left and right weeding knives, and the thickness of the weeding knives is appropriately increased to minimize stress and strain concentration.
(3)Experimental study on the cam rocker swing intra-row weeding device
In order to explore the actual working performance of the cam rocker swing intra-row weeding device, the forward speed, spring stiffness and weeding knife speed were taken as the test factors, and the orthogonal test was carried out with the herbicide rate and the injury rate as the test index. The optimal level combination was verified and compared. The results of orthogonal test showed that the working speed and the speed of the weeding knife had significant effects on the herbicide rate and the injury rate. The spring stiffness had a significant effect on the herbicide rate and the injury rate. The optimum combination is: spring stiffness 60N/mm, forward speed 0.6m/s, weeding blade speed 130r/min; verification and comparison test results show that the weeding rate of the weeding device is 89.8%, and the injury rate is 2.1%. The cam rocker swing intra-row weeding device has better performance than the traditional seedling weeder.
( 4 ) Study on design and operation mechanism of driving rotary vibration type weeding device
In the heavy soil environment, the driving rotary vibration type weeding device is designed to solve the problems of serious rotary teeth and high power consumption during the operation of the rotary cultivator. The design of cams, springs and other components makes the weeding. The weeding knife flexibly vibrates the soil and weeds during the operation of the device, which increases the weeding performance of the weeding teeth while reducing the operating power consumption. The structure and working principle of the driving rotary vibration type weeding device are expounded and analyzed, and the working principle is theoretically analyzed. Through the establishment of the mathematical model of the motion of the weeding device, the analysis of the soil resistance of the weeding cutter and the mechanism of the drag reduction of the weeding device, the main factors affecting the working effect of the device are the machine forward speed, spring stiffness and knife roll speed. According to the theoretical analysis results, the key components such as the weeding blade, camshaft, outer roller, and spring that driving rotary vibration type weeding device are designed.The motion state of the driving rotary vibration type weeding device was simulated by ADAMS software, and the speed and acceleration changes were obtained and analyzed. The modal analysis of the driving rotary vibration type weeding device is carried out by ANSYS Workbench software to prevent resonance. The modal analysis results show that the excitation frequency of the system is much smaller than the natural frequency of the roller, and the possibility of resonance is not high.
(5) Experimental study on driving rotary vibration type weeding device
In order to study the actual working performance of the driving rotary vibration type weeding device,Single factor, multi-factors and comparison tests were carried out in indoor soil tanks in order to obtain the optimal combination of operation parameters. Taking the machine forward speed, the knife roll speed and the spring steel as the test factors, the operating power consumption and the soil breaking rate are the performance indicators. The power consumption test of the driving rotary vibration type weeding device is carried out in the indoor soil tank. The results show that: The contribution rate of each factor to the operation power consumption is from the largest to the smallest, the speed of the cutter roll, the forward speed of the machine, the spring stiffness, and the contribution rate to the crushing rate is the spring stiffness, the speed of the knife roll, and the forward speed of the machine.The contribution rate to the herbicide rate is, from large to small, spring stiffness, knife roll speed, and machine forward speed. The optimal parameter combination is when the machine advance speed is 0.5~0.8m/s, the cutter roller speed is 241~259r/min,and the spring stiffness is 10.42~12.16N/mm, the operating power consumption range is 1.89~2.0kW, and the grounding rate range is 92.9%~93.4%,Weeding rate range is 86.7%~88.5%. The verification and comparison tests were carried out in the indoor soil trough, and the results showed that the operation performance of the driving rotary vibration type weeding device was better than the conventional device. Field experiments showed that when the speed of the knife roll was 251r/min, the machine forward speed was 0.5m/s, and the spring stiffness was 10.5N/mm, the operating power consumption was 2kW, and the grounding rate was 92.8%,The weeding rate is 88.1% The designed driving rotary vibration type weeding device has the working performance to meet the operation requirements of the cultivator.
Key words: ridge maize; cultivator; mechanical weeding; experimental research
目 錄
摘要...............................................................................................................................................................I
英文摘要................................................................................................................................................... III
1 引言..........................................................................................................................................................1
1.1 研究目的與意義............................................................................................................................. 1
1.2 苗間除草機械研究現狀................................................................................................................ 2
1.2.1 國外苗間除草機械研究現狀.................................................................................................2
1.2.2 國內苗間除草機械研究現狀.................................................................................................7
1.2.3 苗間除草裝置結構類(lèi)型....................................................................................................... 11
1.3 驅動(dòng)式行間除草機械研究現狀..................................................................................................11
1.4 振動(dòng)減阻技術(shù)研究現狀.............................................................................................................. 13
1.5 機械除草裝置研究存在的不足..................................................................................................14
1.6 課題來(lái)源和主要研究?jì)热?......................................................................................................... 14
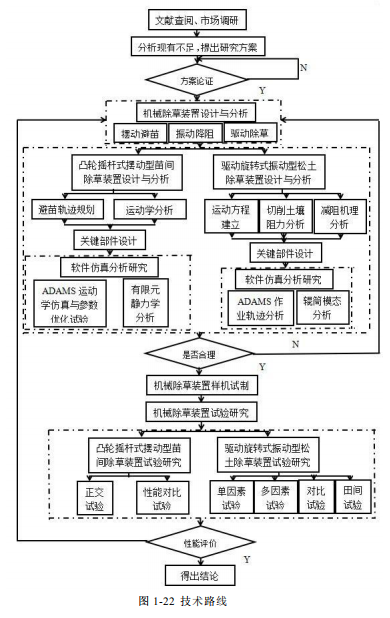
1.7 技術(shù)路線(xiàn)........................................................................................................................................17
2 玉米機械除草裝置整機設計............................................................................................................. 18
2.1 玉米壟作種植模式基礎參數測定............................................................................................. 18
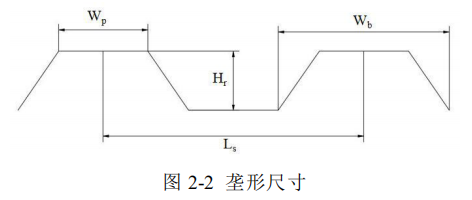
2.1.1 壟型尺寸測定........................................................................................................................18
2.1.2 玉米苗物理參數測定........................................................................................................... 19
2.2 整機設計........................................................................................................................................19
2.2.1 設計要求................................................................................................................................ 19
2.2.2 樣機組成及工作原理........................................................................................................... 19
2.3 本章小結........................................................................................................................................20
3 凸輪搖桿式擺動(dòng)型苗間除草裝置設計與試驗研究....................................................................... 21
3.1 凸輪搖桿式擺動(dòng)型苗間除草裝置結構及工作原理................................................................21
3.1.1 裝置組成................................................................................................................................ 21
3.1.2 工作原理................................................................................................................................ 21
3.2 凸輪搖桿式擺動(dòng)型苗間除草裝置運動(dòng)軌跡規劃與分析....................................................... 22
3.2.1 除草刀避苗運動(dòng)軌跡規劃...................................................................................................22
3.2.2 除草刀運動(dòng)軌跡數學(xué)模型建立.......................................................................................... 23
3.3 凸輪搖桿式擺動(dòng)型苗間除草裝置關(guān)鍵部件設計.................................................................... 24
3.3.1 除草刀設計............................................................................................................................ 24
3.3.2 凸輪搖桿機構設計............................................................................................................... 25
3.3.3 除草刀受力分析及彈簧參數確定...................................................................................... 30
3.4 凸輪搖桿式擺動(dòng)型苗間除草裝置仿真分析.............................................................................32
3.4.1 基于 ADAMS 的除草刀運動(dòng)學(xué)仿真分析......................................................................... 32
3.4.2 除草裝置運動(dòng)參數優(yōu)化試驗研究...................................................................................... 36
3.4.3 除草刀有限元靜力學(xué)分析...................................................................................................39
3.5 凸輪搖桿式擺動(dòng)型苗間除草裝置試驗研究.............................................................................40
3.5.1 試驗樣機設計........................................................................................................................40
3.5.2 試驗材料................................................................................................................................ 41
3.5.3 試驗設備與條件....................................................................................................................41
3.5.4 正交試驗................................................................................................................................ 43
3.5.5 試驗結果與分析....................................................................................................................43
3.5.6 結果驗證及對比試驗........................................................................................................... 46
3.6 本章小結........................................................................................................................................47
4 驅動(dòng)旋轉式振動(dòng)型松土除草裝置設計與試驗研究....................................................................... 48
4.1 驅動(dòng)旋轉式振動(dòng)型松土除草裝置結構組成與工作原理....................................................... 48
4.1.1 結構組成................................................................................................................................ 48
4.1.2 工作原理................................................................................................................................ 49
4.2 驅動(dòng)旋轉式振動(dòng)型松土除草裝置理論分析.............................................................................49
4.2.1 除草裝置運動(dòng)方程建立.......................................................................................................49
4.2.2 除草裝置切削土壤阻力分析...............................................................................................50
4.2.3 除草裝置減阻機理分析.......................................................................................................52
4.3 驅動(dòng)旋轉式振動(dòng)型松土除草裝置關(guān)鍵部件設計.................................................................... 53
4.3.1 除草刀設計............................................................................................................................ 53
4.3.2 輥筒設計................................................................................................................................ 54
4.3.3 壓縮桿設計............................................................................................................................ 55
4.3.4 凸輪軸設計............................................................................................................................ 56
4.3.5 彈簧設計................................................................................................................................ 57
4.4 驅動(dòng)旋轉式振動(dòng)型松土除草裝置仿真分析.............................................................................59
4.4.1 ADAMS 運動(dòng)學(xué)仿真分析.....................................................................................................59
4.4.2 輥筒模態(tài)分析........................................................................................................................62
4.5 驅動(dòng)旋轉式振動(dòng)型松土除草裝置試驗研究.............................................................................65
4.5.1 試驗樣機設計........................................................................................................................65
4.5.2 試驗材料與設備....................................................................................................................66
4.5.3 試驗因素及指標選取........................................................................................................... 66
4.5.4 單因素試驗............................................................................................................................ 67
4.5.5 多因素試驗............................................................................................................................ 77
4.5.6 性能對比試驗........................................................................................................................83
4.5.7 田間試驗................................................................................................................................ 84
4.6 本章小結........................................................................................................................................85
5 結論與展望...........................................................................................................................................87
5.1 結論................................................................................................................................................ 87
5.2 創(chuàng )新點(diǎn)............................................................................................................................................88
5.3 討論與展望....................................................................................................................................89
致謝............................................................................................................................................................90
參考文獻................................................................................................................................................... 91
攻讀博士學(xué)位期間的學(xué)術(shù)論文............................................................................................................. 98
1 引言
1.1 研究目的與意義
近年來(lái),我國玉米種植面積和產(chǎn)量迅速增加,截止到 2016 年,其種植面積超過(guò) 3670 萬(wàn) 公頃,產(chǎn)量達到 2.1 億噸,其穩定生產(chǎn)對于保障國家糧食戰略安全具有重要意義[1].我國玉米種植面積和總產(chǎn)量雖然居于世界前列,但是單產(chǎn)卻較低.玉米單產(chǎn)量主要受品種、栽培技 術(shù)、土壤環(huán)境等多因素影響,其中加強田間管理、有效控制雜草是提高玉米單產(chǎn)量的有效途 徑之一.
田間雜草是農業(yè)生態(tài)系統不可分割的一部分,它們不僅與作物爭奪養分、水分、生長(cháng)空 間等,從而導致作物大面積減產(chǎn);同時(shí)雜草的存在也易滋生病蟲(chóng)害,這些病蟲(chóng)害也會(huì )影響作 物的產(chǎn)量和品質(zhì),因此田間雜草是制約作物高產(chǎn)的主要因素之一[2-3].世界上現有的雜草近 5 萬(wàn)種,其中大部分對農作物有害,全世界每年因雜草而造成的糧食減產(chǎn)損失達到 3 億噸[4]. 作為農業(yè)大國的中國,每年因草害造成糧食減產(chǎn)也有上百億公斤.因此,雜草防治是農田生 產(chǎn)中重要環(huán)節之一,除草技術(shù)及裝備的研發(fā)對于保障糧食增長(cháng)具有重大意義.
目前,世界上除草方法主要有人力除草、化學(xué)除草、機械除草、生物技術(shù)除草、熱電力 除草等[5-7].其中使用最廣泛的是人力除草、化學(xué)除草和機械除草方法,而其他除草方法由于 成本高、適應性較差等缺點(diǎn),致使其至今仍然難以大范圍推廣使用[8-11].人力除草具有環(huán)境 污染少、技術(shù)要求低、操作簡(jiǎn)單等優(yōu)點(diǎn),人力除草是人類(lèi)自文明社會(huì )以來(lái)使用時(shí)間最長(cháng)的除 草方法.但隨著(zhù)經(jīng)濟、技術(shù)的發(fā)展,人力除草除草效率低、人工成本高等缺點(diǎn)日益突出,人 力除草方法逐漸被高效的其他除草方法所代替[12].目前,最常用的除草方法是使用化學(xué)除草 劑去除田間雜草,這種除草方法可以同時(shí)去除行、苗間雜草,具有省時(shí)省力、快速高效等諸 多優(yōu)點(diǎn).但除草劑的長(cháng)期大量使用也給農業(yè)生產(chǎn)帶來(lái)諸多問(wèn)題,如污染農業(yè)生態(tài)環(huán)境、使雜 草產(chǎn)生抗藥性、威脅人們飲食健康等[13].隨著(zhù)人們環(huán)保意識的不斷增強,化學(xué)除草劑的應用 量逐漸減少.
機械除草是使用除草機械去除田間雜草的方法[14-17].機械除草方法具有除草效率高、勞 動(dòng)強度低、綠色環(huán)保等諸多優(yōu)點(diǎn).該方法除草的同時(shí)還可以改善土壤環(huán)境、增強土壤滲透性、 增高地溫等.隨著(zhù)現代農業(yè)技術(shù)的發(fā)展,具有自動(dòng)化控制、智能導航功能的除草機器人應運 而成,且逐漸受到人們的重視[18-19].但是,目前機械除草存在許多問(wèn)題:一方面雖然傳統的 除草機械可高效率的去除行間雜草,但幼苗中的雜草更接近作物,并且難以控制,傳統的除 草機械不能滿(mǎn)足幼苗間對雜草的控制要求;另一方面隨著(zhù)保護性耕作的不斷實(shí)施,粘重土壤 日益增多,現有的除草機具在粘重土壤條件下作業(yè)時(shí)存在除草、碎土效果差,作業(yè)功耗大等 問(wèn)題.因此,針對粘重土壤條件下,設計和開(kāi)發(fā)可同時(shí)防治行和幼苗之間雜草、作業(yè)功耗較 低的新型機械除草設備,具有重要意義.
1.2 苗間除草機械研究現狀
目前行間除草機械已發(fā)展的比較成熟,有大量機型被推廣使用.由于幼苗之間的雜草接 近作物,因此作物苗間除草技術(shù)難度更大.隨著(zhù)現代農業(yè)技術(shù)的發(fā)展,苗(株)間除草機械 逐漸得到發(fā)展.
1.2.1 國外苗間除草機械研究現狀
國外關(guān)于苗(株)間機械除草技術(shù)的研究較早開(kāi)始,相關(guān)研究始于 20 世紀 50 年代.經(jīng) 過(guò)多年的研究和開(kāi)發(fā),已有多種類(lèi)型的機具(如彈簧齒、滾動(dòng)、除草、梳子和手指等除草機) 被推廣使用.如德國開(kāi)發(fā)的爪齒式苗間除草機、日本 RX 系列彈性齒式除草機等,這些苗間 除草機具有除草效率高、傷苗率低等優(yōu)點(diǎn),國外對苗間除草機械的研發(fā)主要以智能除草機械 為主[20,21].
美國加州大學(xué)的 W.S.Lee 等[22-24]開(kāi)發(fā)了一種番茄株間除草機器人(見(jiàn)圖 1-1).該機器 人的工作原理是通過(guò)機器視覺(jué)系統實(shí)時(shí)采集苗草信息,通過(guò)分析和處理信息控制機械臂將除 草劑噴灑到雜草上,達到定點(diǎn)點(diǎn)位除草的目的.實(shí)際作業(yè)證明該種方法可有效地減少除草劑使用量.

丹麥奧胡斯大學(xué)(University of Aarhus)的 Melander 等[25]設計了一種除草刷盤(pán)式株間除草 機(見(jiàn)圖 1-2).其作業(yè)原理是通過(guò)除草刷盤(pán)與地面的相對旋轉運動(dòng)去除株間雜草.其試驗 結果表明,該型除草機除草效率較高,且除草刷盤(pán)轉速和拖拉機前進(jìn)速度對除草效果的影響 不顯著(zhù).瑞典農業(yè)大學(xué)的 Fogelberg[26]也研究了一種除草刷式株間除草機.

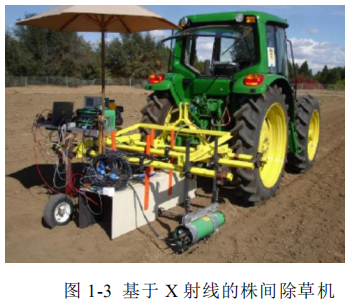
Haff[27]等人開(kāi)發(fā)了基于 X 射線(xiàn)檢測系統的株間除草機(見(jiàn)圖 1-3),該除草機使用 X 射 線(xiàn)高校識別番茄根莖并指導除草執行部件去除番茄根部區域的雜草.田間試驗結果表明,當 機器前進(jìn)速度為 1.6km/h 時(shí),番茄的識別率為 90.7%.
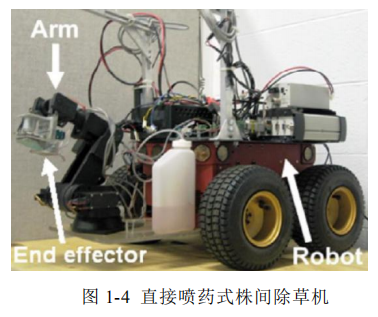
Jeon[28]等人設計了一種精確噴藥式除草機器人(見(jiàn)圖 1-4),該機器人通過(guò)通過(guò)除草器 除草的同時(shí)將除草劑涂抹到雜草莖桿斷口處以完全殺死雜草.
Henrik[29]等設計了 Robovator 除草機(見(jiàn)圖 1-5).該型除草機的工作原理是靠雙譜線(xiàn)掃 描相機定位苗帶信息,控制彈齒的運動(dòng)軌跡以完成除草和避苗動(dòng)作.

Astrand[30,31]等設計了一個(gè)移動(dòng)式除草機器人(見(jiàn)圖 1-6).除草機器人在頂部配備了兩 個(gè)攝像頭和轉向系統.該機器人可自主行走并通過(guò)除草執行器進(jìn)行除草作業(yè).

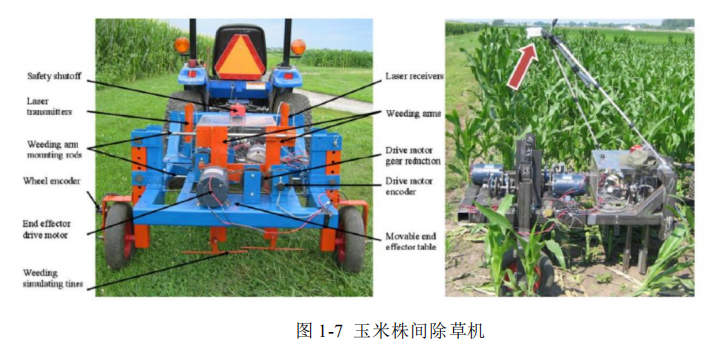
Cordill 和 Grift 等[32]設計了玉米株間除草機(見(jiàn)圖 1-7),該機利用激光傳感器識別定位 玉米莖稈位置,并控制除草刀繞過(guò)玉米植株實(shí)現避苗動(dòng)作.試驗證明其傷苗率較低.
Nerremark 等[33-38]人研究了多種類(lèi)型的植物株間除草機器人.圖 1-8 是一種具有爪式株間 除草機.該除草機通過(guò)匹配機器前進(jìn)速度和爪齒轉速來(lái)實(shí)現避苗、除草動(dòng)作.圖 1-9 為 Hortibot 株間除草機器人,該機器人帶有視覺(jué)檢測系統和 GPS 導航系統,試驗表明這種除草機器人具 有較好的作業(yè)效果.

英國的 Garford 和 Tillet[39,40]設計了一種作物株間除草機(見(jiàn)圖 1-10),該機通過(guò)機器視 覺(jué)系統采集并處理苗草信息,并實(shí)時(shí)控制橫動(dòng)機構以對準刀具位置,通過(guò)旋轉的末端除草器執行除草作業(yè).

荷蘭瓦赫寧根大學(xué) Bakker 等[41,42]設計了一種新型的自動(dòng)除草機器人(見(jiàn)圖 1-11),該機 器人通過(guò) DGPS 系統可實(shí)現田間自主行走,通過(guò)機器視覺(jué)識別雜草和作物,以控制除草刀去 除苗間雜草.

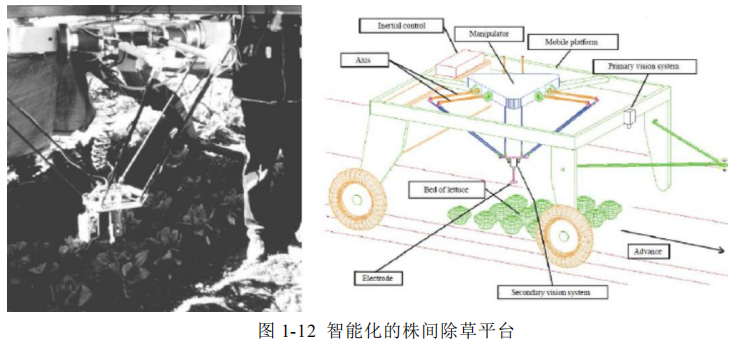
Blasco 等[43]人為蔬菜地設計了一個(gè)株間除草平臺(見(jiàn)圖 1-12),其兩個(gè)機器視覺(jué)系統可 高校定位苗間雜草信息,靠機械手末端釋放高壓電除草.
Perez-Ruiz 等[44,45]人設計了室內除草機器人(見(jiàn)圖 1-13),它通過(guò)機器視覺(jué)技術(shù)檢測幼 苗位置信息,通過(guò)控制兩側除草刀的運動(dòng)軌跡實(shí)現除草避苗動(dòng)作.
Gobor 等[13,46,47]設計了一種電動(dòng)株間除草機(見(jiàn)圖 1-13),該機器在向前行進(jìn)的同時(shí), 位于機架上方的伺服電機帶動(dòng)除草機構旋轉,通過(guò)匹配其旋轉速度與前進(jìn)速度來(lái)實(shí)現作物株 間除草作業(yè)的目的.

Duerinckx[48]等研究了一種彈齒式株間除草機.日本北海道大學(xué)的 Masaki[49]等設計了一 種用于甜菜地的間苗機,如圖 1-14 所示.
1.2.2 國內苗間除草機械研究現狀.
國內除草機械的研究起步較晚且主要為行間除草機.對于作物苗間除草機械,特別是智 能化苗間除草機,國內與歐美等發(fā)達國家差距相對較大.近年來(lái),隨著(zhù)國內機械、電子、自 動(dòng)控制等技術(shù)的不斷發(fā)展和成熟,一些大學(xué)和研究機構也已開(kāi)始了對智能除草機械的研究.
郭占斌等[50]設計了一種彈性帶齒式苗間除機,該除草機采用偏心彈齒作為除草部件.劉 天祥等[51]人進(jìn)一步改進(jìn)了彈齒式中耕除草機(見(jiàn)圖 1-15).改進(jìn)后的機器結構小巧、傷害率 低、除草性能更強.

魏兆凱等[52]人設計了一種大豆苗間除草機(見(jiàn)圖 1-16).其除草部件是多組串聯(lián)的針齒 板,該機除草的同時(shí)還可進(jìn)行松土作業(yè).田間試驗結果表明,該機除草性能較好,使大豆產(chǎn)量平均增加 8%~10%.
吉林大學(xué)的韓豹等[53,54]分別設計了水平圓盤(pán)式(見(jiàn)圖 1-17)和組合梳齒式苗間除草機(見(jiàn) 圖 1-18).田間試驗表明:水平圓盤(pán)式除草機傷苗率小于 5%,組合梳齒式除草機在梳齒數 為 6,梳齒間距為 50mm,梳齒速度為 180r/min,前進(jìn)速度為 2.3m/s 時(shí)的除草率達到 87.6%, 傷苗率為 2.73%,其性能也滿(mǎn)足間除草作業(yè)要求.

陳樹(shù)人等[55-57]設計了一種八爪式苗間除草裝置(見(jiàn)圖 1-19).其依靠軌道移動(dòng)的滑塊和 帶螺旋軌道的套管來(lái)實(shí)現除草齒上下移動(dòng)和旋轉.同時(shí)其還發(fā)明了一種六爪除草執行機構和 分體扇式除草裝置[58,59].
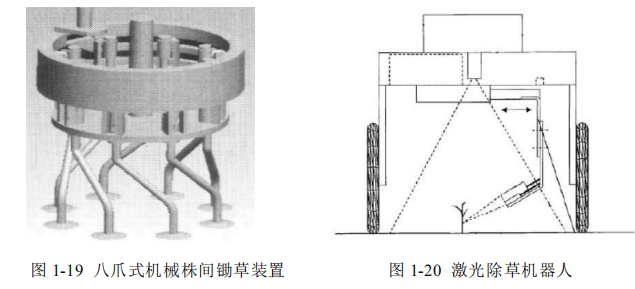
劉繼展等[60]發(fā)明了激光除草機器人(見(jiàn)圖 1-20),該機器人通過(guò)視覺(jué)識別系統實(shí)現雜草 的識別和定位,控制激光光束對準雜草,利用激光熱效應燒死雜草.
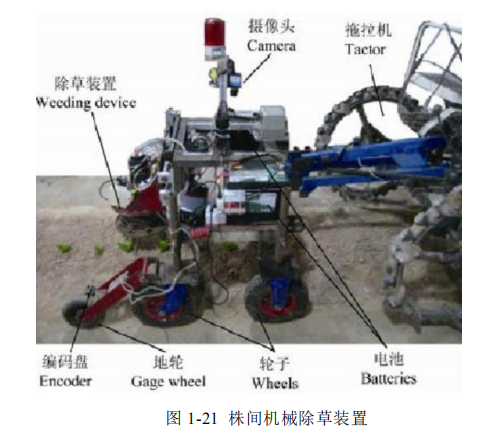
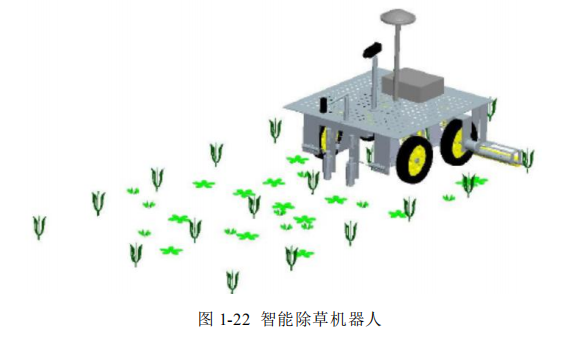
胡煉等[61,62]設計了一種余擺運動(dòng)的爪齒式株間機械除草裝置(見(jiàn)圖 1-21),該裝置通過(guò) 控制算法控制爪齒作余擺線(xiàn)運動(dòng)以達到避苗和除草的目的.陳勇等[63-65]設計了一種智能除草 機器人(見(jiàn)圖 1-22).除草機器人通過(guò)除草刀切割雜草并且在斷裂處涂抹除草劑以完全消除 雜草.吳建等[66]設計了自動(dòng)可視除草機器人.
張春龍等[67]設計了一種智能鋤草機器人.該除草機器人的除草率高達 90%以上.中國農 業(yè)大學(xué)和蘇州博田自動(dòng)化技術(shù)有限公司研制了一種應用于蔬菜大田的智能苗間除草機(見(jiàn)圖 1-23),田間試驗結果表明,該除草機的除草率為 88.6%,傷苗率為 1.6%[68].

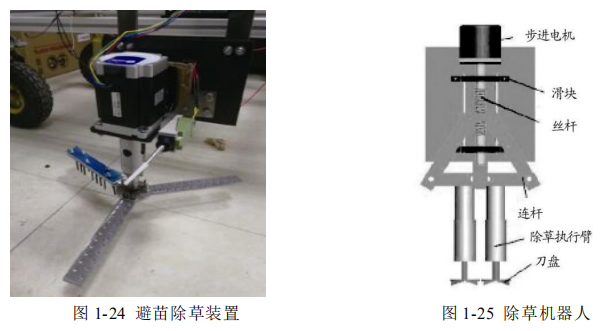
吉林大學(xué)賈紅雷等[69]設計了玉米苗間避苗除草裝置(見(jiàn)圖 1-24),土槽試驗表明其平均 傷苗率為 5.9%、平均除草率為 94.7%.李碧青等[70]設計了一種自動(dòng)識別雜草的除草機器人(見(jiàn) 圖 1-25),其靠步進(jìn)電機帶動(dòng)除草刀盤(pán)去除苗間雜草.
國內智能除草裝置的研究尚處于起步階段,且其研究大多是針對旋轉式除草裝置,而針 對擺動(dòng)式除草裝置的研究,國內鮮有報道.



…………由于本文篇幅較長(cháng),部分內容省略,詳細全文見(jiàn)文末附件
5 結論與展望
5.1 結論
近年來(lái),隨著(zhù)人們環(huán)保意識不斷增強,機械除草越來(lái)越受到人們的重視,本文對國內外 機械除草裝置的研究現狀進(jìn)行了總結和歸納,闡述了目前現有機型的優(yōu)勢與不足之處,在分 析和總結現有技術(shù)的基礎上,針對我國壟作玉米機械除草作業(yè)中存在的問(wèn)題,結合粘重土壤 作業(yè)環(huán)境,分別設計了凸輪搖桿式擺動(dòng)型苗間除草裝置和驅動(dòng)旋轉式振動(dòng)型松土除草裝置. 通過(guò)理論分析及軟件仿真優(yōu)化其關(guān)鍵部件參數,同時(shí)在室內土槽中進(jìn)行了多因素試驗,探究 了各因素對機械除草裝置作業(yè)性能的影響規律,最后實(shí)體加工優(yōu)化后的機械除草裝置并進(jìn)行 田間試驗,以檢驗裝置實(shí)的際作業(yè)性能.本研究主要結論如下:
(1)國內對苗間除草裝置的研究以旋轉式除草裝置為主,而對于擺動(dòng)式除草裝置的研究 卻鮮有報道,結合我國北方壟作玉米種植特點(diǎn),創(chuàng )新設計一種凸輪搖桿式擺動(dòng)型苗間除草裝 置,凸輪搖桿機構的設計,將電機的連續轉動(dòng)轉換為除草刀往復擺動(dòng),大大縮短了避苗時(shí)間, 提高了裝置的作業(yè)效率.根據玉米苗及其根系空間結構參數,合理規劃了除草裝置避苗運動(dòng) 軌跡,將其設計為近"菱形".對凸輪搖桿式擺動(dòng)型苗間除草裝置的關(guān)鍵部件進(jìn)行參數設計, 分配其凸輪運動(dòng)角為:近休止角為 11π/36,推程運動(dòng)角為 2π/3,回程運動(dòng)角為 2π/3,遠休止 角為 13π/36,為凸輪機構選擇正弦加速度曲線(xiàn)運動(dòng)規律,采用反轉法合理的設計了凸輪輪廓 曲線(xiàn).
(2)應用 ADAMS 軟件模擬除草裝置的運動(dòng)狀態(tài),分析其避苗運動(dòng)軌跡,得到當前進(jìn) 速度一定時(shí),隨著(zhù)轉速的增加,除草裝置避苗軌跡圍城的面積減小;當轉速一定時(shí),隨著(zhù)前 進(jìn)速度的增加,除草裝置避苗軌跡圍成的面積變大的規律,為了進(jìn)一步優(yōu)化除草裝置運動(dòng)參 數,以凸輪軸轉速、機器前進(jìn)速度為試驗因素,覆蓋率和入侵率為試驗指標,基于 ADAMS 軟件采用多因素二次正交旋轉組合設計試驗方法進(jìn)虛擬試驗,得到了該裝置的最優(yōu)運動(dòng)參數 組合:凸輪軸轉速 830deg/s、機器前進(jìn)速度 813mm/s.應用 ANSYS Workbench 軟件對凸輪搖 桿式擺動(dòng)型苗間除草裝置的除草刀進(jìn)行靜力學(xué)有限元分析,結果表明轉動(dòng)中心孔為除草刀薄 弱部位,為防止作業(yè)過(guò)程中除草刀出現應力、應變集中等問(wèn)題,本文為左、右除草刀各設計 了一個(gè)刀座,同時(shí)適當增加除草刀的厚度,以期盡量減小應力、應變集中.
(3)為研究凸輪搖桿式擺動(dòng)型苗間除草裝置的作業(yè)性能,以前進(jìn)速度、彈簧剛度和除草 刀轉速為試驗因素,以除草率、傷苗率為試驗指標,在室內土槽中進(jìn)行正交試驗 L9(34),通 過(guò)極差、方差分析得到:作業(yè)速度和除草刀轉速對除草率和傷苗率影響均為顯著(zhù),彈簧剛度 對除草率和傷苗率影響為極顯著(zhù),該結果與軟件仿真結果一致.通過(guò)綜合加權評分法確定凸 輪搖桿式擺動(dòng)型苗間除草裝置的最優(yōu)水平組合為:彈簧剛度為 60N/mm、前進(jìn)速度為 0.6m/s、 除草刀轉速 130r/min;以最優(yōu)水平組合進(jìn)行驗證及對比試,驗結果表明凸輪搖桿式擺動(dòng)型苗 間除草裝置的除草率為 89.8%,傷苗率為 2.1%,該裝置的作業(yè)性能優(yōu)于傳統中耕機.
(4)針對現有旋轉中耕機作業(yè)時(shí)存在除草、碎土效果差,功耗較大等問(wèn)題,結合粘重土壤作業(yè)環(huán)境,設計了驅動(dòng)旋轉式振動(dòng)型松土除草裝置.除草裝置運動(dòng)學(xué)分析得到其除草刀的切削速度與裝置的運動(dòng)參數、振幅和除草刀所處的位置都有關(guān)系,隨著(zhù)裝置運動(dòng)參數和振幅的增大,其切削速度也增大.除草刀切削土壤阻力分析得到了影響裝置切削阻力的主要因素為土壤特性參數、除草刀外形尺寸、裝置的運動(dòng)參數等,當土壤環(huán)境確定后,可通過(guò)優(yōu)化設計除草刀尺寸、選擇合適的運動(dòng)參數來(lái)降低除草刀的切削阻力.建立了裝置的系統振動(dòng)微分方程及對方程進(jìn)行求解,得到機器前進(jìn)速度、彈簧剛度和刀輥轉速影響其作業(yè)效果.根據理論分析結果,對驅動(dòng)旋轉式振動(dòng)型株間松土除草裝置的除草刀、凸輪軸、外輥筒、彈簧等關(guān)鍵部件進(jìn)行尺寸設計.
(5)應用ADAMS軟件對驅動(dòng)旋轉式振動(dòng)型松土除草裝置的運動(dòng)狀態(tài)進(jìn)行模擬,通過(guò)分析對比軌跡曲線(xiàn)得到機器前進(jìn)速度、刀輥轉速對驅動(dòng)旋轉式振動(dòng)型松土除草裝置作業(yè)效果均有較大影響,仿真所得軌跡與理論分析相一致.基于A(yíng)NSYSWorkbench軟件對驅動(dòng)旋轉式振動(dòng)型松土除草裝置輥筒進(jìn)行模態(tài)分析,結果表明系統激振頻率遠小于外輥筒的固有頻率,發(fā)生共振可能性不大,但在較高工作轉速的環(huán)境下,發(fā)生共振的概率會(huì )增大,為進(jìn)一步防止共振發(fā)生,可適當增加輥筒的厚度,以增強其作業(yè)的穩定性.
(6)為研究驅動(dòng)旋轉式振動(dòng)型松土除草裝置實(shí)際作業(yè)性能.以機器前進(jìn)速度、刀輥轉速及彈簧鋼度為試驗因素,選取作業(yè)功耗、碎土率、除草率為作業(yè)性能指標,分別進(jìn)行單因素及多因素二次正交旋轉組合試驗,結果表明各因素對作業(yè)功耗影響貢獻率由大到小依次為刀輥轉速、機器前進(jìn)速度、彈簧剛度,對碎土率影響的貢獻率由大到小依次為彈簧剛度、刀輥轉速、機器前進(jìn)速度,對除草率影響的貢獻率由大到小依次為彈簧剛度、刀輥轉速、機器前進(jìn)速度;最優(yōu)參數組合為刀輥轉速241~259r/min、機器前進(jìn)速度0.5~0.8m/s、彈簧剛度10.42~12.16N/mm,作業(yè)功耗范圍為1.89~2.0kW、碎土率范圍為92.9%~93.4%,除草率范圍為86.7%~88.5%.對比試驗結果表明:其除草率88.5%、碎土率為93.3%、作業(yè)功耗為1.97kW,與傳統機型相比其減阻降耗效果明顯,可使機器的作業(yè)功耗下降30%左右.將試驗樣機加工進(jìn)行田間試驗,結果表明,當刀輥轉速為251r/min、機器前進(jìn)速度為0.5m/s、彈簧剛度為10.5N/mm時(shí),測得其除草率為88.1%,碎土率為92.8%,作業(yè)功耗為2kW,其性能滿(mǎn)足中耕機的作業(yè)要求.
5.2創(chuàng )新點(diǎn)
(1)創(chuàng )新設計了一種凸輪搖桿式擺動(dòng)型苗間除草裝置(已申報國家發(fā)明專(zhuān)利:201611240838.3,201611241011.4),填補了國內對擺動(dòng)式除草裝置的研究空白,裝置創(chuàng )造性的應用凸輪搖桿機構將電機連續轉動(dòng)轉換為除草刀往復擺動(dòng),簡(jiǎn)化了除草裝置避苗動(dòng)作和控制程序,提高了除草裝置作業(yè)效率.
(2)將振動(dòng)減阻方法引入到中耕機設計中,設計了一種驅動(dòng)旋轉式振動(dòng)型松土除草裝置(發(fā)明專(zhuān)利授權:ZL201410545396.8),彈簧、凸輪等部件的設計,使除草裝置作業(yè)時(shí)與土壤構成振動(dòng)系統,形成對土壤的振動(dòng)切削作用,降低了裝置作業(yè)阻力和能耗的同時(shí),增強了其松土、碎土效果.
5.3討論與展望
(1)對于凸輪搖桿式擺動(dòng)型苗間除草裝置,今后的研究重點(diǎn)應是開(kāi)發(fā)一套適用于擺動(dòng)式除草裝置的苗草識別定位方法,以期在大田中檢驗擺動(dòng)式除草裝置的實(shí)際作業(yè)性能.
(2)文章設計的除草刀采用45鋼材料,作業(yè)過(guò)程中出現了泥土粘附刀表面的現象,建議探索一種新的除草刀材質(zhì),以增加其表面潤滑度,減小土壤粘附量,以期進(jìn)一步降低除草裝置的切削阻力和作業(yè)功耗.
(3)加工出玉米機械除草裝置試驗樣機整機,進(jìn)行田間試驗研究.
致謝
轉眼間五年的碩博士生涯即將結束,回顧五年的科研生涯,有過(guò)迷茫、有過(guò)困惑、有過(guò)彷徨、有過(guò)退縮,但每當我準備放棄的時(shí)候,導師周福君教授都會(huì )在第一時(shí)間找到我,與我談心并給予我鼓勵和關(guān)懷,幫助我度過(guò)難關(guān).這里要對我的導師周福君教授致以最由衷的感謝,五年來(lái)周老師淵博的專(zhuān)業(yè)知識、嚴謹的科研態(tài)度和豁達的生活態(tài)度深深的感染著(zhù)我,使我受益終生,整個(gè)碩博生涯中,導師在我的博士課題選題、研究方案擬定、試驗樣機加工、試驗方案制定等多方面都傾注了大量的心血,同時(shí)在小論文撰寫(xiě)過(guò)程中,導師也給予了審閱和修改意見(jiàn),可以說(shuō),整個(gè)博士生涯中我的每一份收獲都離不開(kāi)導師的鞭策和指導,您為學(xué)生的付出,學(xué)生將銘記于心!
感謝許春林教授、賈富國教授、王德福教授在開(kāi)題的過(guò)程中對我的指導,感謝老師們提出的寶貴建議,讓我在后續的課題研究過(guò)程中少走許多彎路.同時(shí)感謝楊秀章、余振杰兩位老師試驗過(guò)程中對我的大力支持.感謝黑龍江省農機科學(xué)研究院郭兵在試驗樣機加工中給予的幫助.
對于整個(gè)博士階段的科研過(guò)程中,要感謝是我們427實(shí)驗室的全體成員,在博士課題過(guò)程中,李小利、孫永利、李天宇、官曉東、趙廣闊、朱光強、吳昊、王天元、陳旭等師弟一直幫助我順利完成相關(guān)研究,跟你們在一起的日子充滿(mǎn)了歡聲笑語(yǔ).
特別的一份感謝還要送給我的父母、姐姐、姐夫.是你們的鼓勵和支持才使我順利完成學(xué)業(yè).親情永遠是我人生道路上溫暖的港灣,我愛(ài)你們.特別是我的妻子王超女士,在我失落沮喪時(shí)給予我鼓勵和支持,讓我的博士生涯倍感溫暖.
本研究得到國家科技支撐計劃項目(2014BAD06B04)和國家重點(diǎn)研發(fā)計劃項目(2016YFD0701905)的大力支持,并且在北方寒地現代農業(yè)裝備與技術(shù)省重點(diǎn)實(shí)驗室完成的,在此表示深深地感謝.
參考文獻
[1] 國務(wù)院. 2015 年中央一號文件:關(guān)于加大改革創(chuàng )新力度加快農業(yè)現代化建設的若干意見(jiàn) [Z]. 北京,2015.
[2] 強勝,宋小玲. 雜草科學(xué)與農業(yè)生產(chǎn)安全[J]. 國際學(xué)術(shù)動(dòng)態(tài),2007,(4):21-25.
[3] 涂鶴齡. 我國農田雜草研究和防治進(jìn)展[J]. 黑龍江農業(yè)科學(xué),2001,40(1):1-3.
[4] 李江國,劉占良,張晉國,等. 國內外田間機械除草技術(shù)研究狀[J]. 農機化研究,2006, 10(5):14-16.
[5] 黃小龍. 蔬菜株間鋤草機器人末端執行器優(yōu)化設計研究[D]. 中國農業(yè)大學(xué),2014.
[6] 白勇,王曉燕,胡光,張有度. 非化學(xué)方法在農田雜草防治中的應用[J]. 農業(yè)機械學(xué)報, 2007,38(4):191-196.
[7] 韓豹. 東北壟作株間除草機械關(guān)鍵部件研究與整機設計[D]. 吉林大學(xué),2011.
[8] 陳樹(shù)人,栗移新,潘雷. 熱除草技術(shù)現狀和展望[J]. 安徽農業(yè)科學(xué),2008,35(33):95-97.
[9] 李東升,張蓮潔,蓋志武,等. 國內外除草技術(shù)研究現狀[J]. 森林工程,2002(01):17-18.
[10] 筱軍. 國外除草新技術(shù)[J]. 農業(yè)工程技術(shù),1993(04):29.
[11] Heisel T,Schou J,Christensen S,Andreasen C. Cutting weeds with a CO2 laser [J]. Weed Research,2001,41(1):19-29.
[12] 強勝. 我國雜草學(xué)研究現狀及其發(fā)展策略[J]. 植物保護,2010,36(4):1-5.
[13] Gobor Z. Mechatronic System for Mechanical Weed Control of the Intra-row Area in Row Crops [J]. KI-Künstliche Intelligenz,2013,27(4):379-383.
[14] 陳子文,張春龍,李楠,等. 智能高效株間鋤草機器人研究進(jìn)展與分析[J]. 農業(yè)工程學(xué) 報,2015,31(5):42-46.
[15] 邢占強. 智能化除草機器人技術(shù)發(fā)展現狀與趨勢展望[J].農業(yè)科技與裝備,2015(05): 37-28.
[16] 王洪昌. 基于鼢鼠爪齒幾何結構特征的苗間仿生除草鏟設計.吉林大學(xué),2015.
[17] Griepentrog H W,Dedousis A P.Mechanical weed control[M]∥Dedousis A P,Bartznas T.Soil engineering: soil biology,vol.20,2010: 171-179.
[18] 范德耀,姚青,楊保軍,等. 田間雜草識別與除草技術(shù)智能化研究進(jìn)展[J]. 中國農業(yè)科 學(xué),2010,43(9):1823-1833.
[19] 毛文華. 基于機器視覺(jué)的田間雜草識別技術(shù)研究[D].北京:中國農業(yè)大學(xué),2004.
[20] 李燕. 滾齒式株間除草機構的設計與仿真[D].北京林業(yè)大學(xué), 2013.
[21] 李江國,劉占良,張晉國,等. 國內外田間機械除草技術(shù)研究現狀[J]. 農機化研究,2006, 10(5):14-16.
[22] Lee WS , Slaughter D , Giles D. Robotic weed control system for tomatoes[J]. Precision Agriculture,1999,1(1):95-113.
[23] Gliever C,Slaughter D C. Crop versus weed recognition with artificial neural networks [J]. American Society of Agricultural Engineers,2001,60:144-155.
[24] Staab E,Slaughter D,Zhang Y,Giles D. Hyperspectral imaging system for precision weed control in processing tomato [C]. ASAE Annual Meeting,2009.
[25] Melander B. Optimization of the adjustment of a vertical axis rotary brush weeder for intra-row weed control in row crops [J]. Journal of Agricultural Engineering Research,1997, 68(1):39-50.
[26] Fogelberg F, Kritz G. Intra-row weeding with brushes on vertical axes-factors influencing in-row soil height [J]. Soil and Tillage Research,1999,50(2):149-157.
[27] Haff R,Slaughter D,Jackson E. X-ray based stem detection in an automatic tomato weeding system [J]. Applied engineering in agriculture,2011,27(5):803.
[28] Jeon H Y, Tian L F. Direct application end effector for a precise weed control robot [J]. Biosystems engineering,2009,104(4):458-464.
[29] Midtiby H S, Giselsson T M,J?rgensen R N. Estimating the plant stem emerging points (PSEPs) of sugar beets at early growth stages [J]. Biosystems engineering,2012,111(1): 83-90.
[30] Astrand B , Baerveldt A-J. A vision based row-following system for agricultural field machinery [J]. Mechatronics,2005,15(2):251-269.
[31] Astrand B , Baerveldt A-J. An agricultural mobile robot with vision-based perception for mechanical weed control [J]. Autonomous robots,2002,13(1):21-35.
[32] Cordill C,Grift T. Design and testing of an intra-row mechanical weeding machine for corn [J]. Biosystems engineering,2011,110(3):247-252.
[33] N?rremark M,Griepentrog H W,Nielsen J,S?gaard H T. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops [J]. Biosystems Engineering,2008,101(4):396-410.
[34] Griepentrog H-W,N?rremark M,Nielsen J,Ibarra J S. Autonomous Inter-Row Hoeing using GPS-based side-shift control [J]. 2007,9(5):1-9.
[35] Griepentrog H-W,N?rremark M,Nielsen J. Autonomous intra-row rotor weeding based on GPS [C]. Proceedings of the CIGR World Congress Agricultural Engineering for a Better World,Bonn,Germany,2006.
[36] N?rremark M,Griepentrog H W,Nielsen J,S?gaard H T. Evaluation of an autonomous GPS-based system for intra-row weed control by assessing the tilled area [J]. Precision agriculture,2012,13(2):149-162.
[37] RN Jorgensen R,Sorensen C,Maagaard J,et cl:A system design of a robotic tool carrier for high-tech plant nursing [J],2007,9(6):1-13.
[38] N?rremark M,S?rensen C G,J?rgensen R N. Hortibot:Comparison of present and future phyto-technologies for weed control-PartIII[C]. 2006 ASABE Annual International Meeting, Portland Convention Center,Portland,Oregon,2006.
[39] Tillett N,Hague T,Grundy A,et cl. Mechanical within-row weed control for transplanted crops using computer vision [J]. Biosystems Engineering,2008,99(2):171-178.
[40] Dedousis A. An investigation into the design of precision weeding mechanisms for inter or intra-row weed control[J]. 2007.
[41] Bakker T,van Asselt K,Bontsema J,et cl. An autonomous weeding robot for organic farming [C]. Springer. Field and Service Robotics,2006.
[42] Bakker T. An autonomous robot for weed control:design navigation and control[D]. publisher not identified,2009.
[43] Blasco J,Aleixos N,Roger J,et cl. AE-Automation and Emerging Technologies:Robotic Weed Control using Machine Vision [J]. Biosystems Engineering,2002,83(2):149-157.
[44] Pérez-Ruiz M,Slaughter D,Gliever C,et cl. Automatic GPS-based intra-row weed knife control system for transplanted row crops [J]. Computers and electronics in agriculture,2012, 80:41-49.
[45] Pérez-Ruíz M,Slaughter D C,Fathallah F A,et cl. Co-robotic intra-row weed control system [J]. Biosystems Engineering,2014,126:45-55.
[46] Gobor Z , Schulze Lammers P. Prototype of a rotary hoe for intra-row weeding[C]. Proceedings of the 12th IF To MM World Congress in Mechanism and Machine Science, Besancon,France,2007.
[47] Gobor Z, Lammers P S, Martinov M. Development of a mechatronic intra-row weeding system with rotational hoeing tools:Theoretical approach and simulation [J]. Computers and electronics in agriculture,2013,98:166-174.
[48] Duerinckx K,Mouazen A M,Anthonis J,et cl. Effects of spring-tine settings and operational conditions on the mechanical performance of a weed harrow tine [J]. Biosystems engineering,2005,91(1):21-34.
[49] Terawaki M,Kataoka T,Okamoto H,et cl. Development of automatic weeding thinner for sugar beet[C]. Proceedings of the ASAE Annual Meeting Las Vegas,USA,Paper,2003.
[50] 郭占斌. 一種新型彈齒式苗間中耕鋤草機的研制[J]. 現代化農業(yè),2005,(2):39-39.
[51] 劉天祥,張穎,韓霞,等. 彈齒式苗間鋤草機的改進(jìn)設計[J]. 農機化研究,2010,(2): 107-109.
[52] 魏兆凱,張修春. 大豆苗間除草松土機的設計[J]. 農機化研究,2009,31(6):83-86.
[53] 韓豹,吳文福,申建英. 水平圓盤(pán)式苗間除草裝置試驗臺優(yōu)化試驗[J]. 農業(yè)工程學(xué)報, 2010,(2):142-146.
[54] 韓豹,吳文福,李興. 組合梳齒式株問(wèn)除草機構優(yōu)化試驗[J]. 農業(yè)工程,2011,27(1): 16-19.
[55] 張朋舉,張紋,陳樹(shù)人,等. 八爪式株間機械除草裝置虛擬設計與運動(dòng)仿真[J]. 農業(yè)機 械學(xué)報,2010,41(4):56-59.
[56] 陳樹(shù)人,張朋舉,尹東富,等. 基于 LabVIEW 的八爪式機械株間除草裝置控制系統[J]. 農 業(yè)工程學(xué)報,2010,26(增刊 2):234 -237.
[57] 周恩權,毛罕平,陳樹(shù)人. 八爪除草機構的設計與實(shí)驗-基于虛擬樣機技術(shù)[J]. 農機化 研究,2011,33(2):62-64.
[58] 江蘇大學(xué). 一種除草機器人的六爪執行機構[P]. 中國專(zhuān)利,200810019830.3. 2008-8-13.
[59] 江蘇大學(xué).一種張合型扇形耙機械除草裝置 [P]. 中國專(zhuān)利,201010106970.1. 2010-7-7.
[60] 江蘇大學(xué).一種激光除草機器人[P]. 中國專(zhuān)利,200910031994.2. 2009-6-26.
[61] 胡煉,羅錫文,嚴乙桉,等. 基于爪齒余擺運動(dòng)的株間機械除草裝置研制與試驗[J]. 農 業(yè)工程學(xué)報,2012,28(14):10-16.
[62] 胡煉,羅錫文,張智剛,等. 基于余擺運動(dòng)的株間機械除草爪齒避苗控制算法[J].農業(yè)工 程學(xué)報,2012,28(23):12-18.
[63] 侯學(xué)貴,陳勇,郭偉斌. 除草機器人田間機器視覺(jué)導航[J]. 農業(yè)機械學(xué)報,2008,39(3): 106-108.
[64] 郭偉斌. 除草機器人設計與控制[D]. 南京:南京林業(yè)大學(xué),2008.
[65] 王艷. 高效除草機器人控制系統設計[D]. 南京林業(yè)大學(xué),2013.
[66] 吳健,閆磊,錢(qián)樺,等. 自動(dòng)可視除草機器人系統設計[J]. 湖南農業(yè)科學(xué),2011,(11): 129-131.
[67] 張春龍,黃小龍,耿長(cháng)興,等. 智能鋤草機器人系統設計與仿真[J]. 農業(yè)機械學(xué)報,2011, 42(7):196-185.
[68] 黃小龍,劉衛東,張春龍,等. 苗間鋤草機器人鋤草刀優(yōu)化設計[J]. 農業(yè)機械學(xué)報,2012, 43(6):42-46.
[69] 賈洪雷,李森森,王剛等. 中耕期玉米田間避苗除草裝置設計與試驗[J]. 農業(yè)工程學(xué)報, 2018,34(7):15-22.
[70] 李碧青,朱強,鄭仕勇,等. 雜草自動(dòng)識別除草機器人設計:基于嵌入式 Web 和 ZigBee 網(wǎng)關(guān)[J]. 農機化研究,2017,39(1):217-221.
[71] 李守仁,林金天. 驅動(dòng)型土壤耕作機械的理論與計算[M]. 北京:機械工業(yè)出版社,1997.
[72] 戴興任. 國外中耕機械發(fā)展概況[J]. 糧油加工與食品機械,1979,(7):10-27.
[73] 格力莫官網(wǎng).http://www.erfolg-ernten.de/cn/
[74] Md A Matin,John M Fielke,Jacky MA. Desbiolles Furrow parameters in rotary strip-tillage: Effect of blade geometry and rotary speed[J]. Biosystems Engineering,2014,118:7-15.
[75] 王吉亮,朱維,王序儉,等.3XZF-5 型旋轉中耕追肥機[J].新疆農機化,2003(03):27-28.
[76] 張惠友,侯書(shū)林,董欣,等. XQ-7 型驅動(dòng)式中耕除草復式作業(yè)機[J]. 東北農業(yè)大學(xué)報, 1998,29(1):62-67.
[77] 呂金慶,王英博,兌瀚,等. 驅動(dòng)式馬鈴薯中耕機關(guān)鍵部件設計與碎土效果試驗[J].農 業(yè)機械學(xué)報,2017,48(10):49-58.
[78] 邱立春,李寶筏. 自激振動(dòng)深松機減阻試驗研究[J]. 農業(yè)工程學(xué)報,2000,16(6):72-76.
[79] 崔濤,史智棟,楊麗,等. 彈簧預緊力可調式振動(dòng)深松機設計與試驗[J]. 農業(yè)機械學(xué)報, 2016,47(增刊 1):96-102.
[80] 蔣建東,高潔,趙穎娣,等. 土壤旋切振動(dòng)減阻的有限元分析[J]. 農業(yè)機械學(xué)報,2012, 43(1):58-62.
[81] 李霞,付俊峰,張東興,等. 基于振動(dòng)減阻原理的深松機牽引阻力的試驗[J]. 農業(yè)工程 學(xué)報,2012,28(1):32-36.
[82] 劉宏俊,趙淑紅,譚賀文. 基于刮削與振動(dòng)原理的減粘降阻鎮壓裝置研究[J]. 農業(yè)機械 學(xué)報,2018,49(1):86-92.
[83] 中國農業(yè)機械化科學(xué)研究院.農業(yè)機械設計手冊:上冊[M]. 北京:中國農業(yè)科學(xué)技術(shù)出 版社,2007.
[84] 石永剛,吳央芳等. 凸輪機構設計與應用創(chuàng )新[M]. 北京:機械工業(yè)出版社,2007.
[85] 孫一源等. 農業(yè)土壤力學(xué)[M]. 北京:農業(yè)出版社,1985.
[86] 宋建農,李自華. 反轉旋耕理論分析[J]. 北京農業(yè)工程大學(xué)學(xué)報,1990,10(3):15~22.
[87] 盧里耶 A B,格羅姆勃切夫斯基 A A. 農業(yè)機械的設計和計算[M]. 袁佳平,汪裕安,顧 永康,譯. 北京:農業(yè)機械出版社,1983.
[88] 李增剛. ADAMS 入門(mén)詳解與實(shí)例[M]. 北京:國防工業(yè)出版社,2006.
[89] 張桂菊,肖才遠,譚青,等. 基于虛擬樣機技術(shù)挖掘機工作裝置動(dòng)力學(xué)分析及仿真[J]. 中 南大學(xué)學(xué)報(自然科學(xué)版),2014,45(6):1827-1833.
[90] 刁海豐,張偉,付曉明,等. 行星齒輪式旱地栽植機構運動(dòng)軌跡分析及優(yōu)化[J]. 農機化 研究,2012,(6):31-37.
[91] 王文明,高英敏,王倩,等. 基于 ADAMS 的栽植器鴨嘴運動(dòng)的改進(jìn)設計[J]. 農機化研 究,2009,(3):123-129.
[92] 鄭黎明,黃劍波. 基于 ADAMS 和 Simulink 的太陽(yáng)跟蹤器聯(lián)合仿真[J]. 光學(xué)精密工程, 2014,22(5):1213-1219.
[93] 溫正,張文電等. ANSYS14.0 有限元分析權威指南[M]. 北京:機械工業(yè)出版社,2013.
[94] 凌桂龍,丁金濱,溫正. ANSYS Workbench13.0 從入門(mén)到精通[M]. 北京:清華大學(xué)出版 社,2012.
[95] 葛云,吳云飛,王磊,等. 基于 ANSYS 微型旋耕機旋耕彎刀的應力仿真[J]. 石河子大 學(xué)學(xué)報,2007,5(25):627-629.
[96] 生昕,王楊,金亦富,等. 基于 ANSYS 的雙軸旋耕機機架輕量化設計[J]. 農業(yè)裝備技 術(shù),2016,42(4):15-18.
[97] 李文春,王斌,劉曉麗,等. 基于 ANSYS 的果園避障旋耕機旋耕刀片有限元分析[J]. 江 蘇農業(yè)科學(xué),2017,45(7):193-196.
[98] 謝瑞真,韓鵬舉,白曉紅,等. 典塑砂土鹽漬士的電化學(xué)特性及其腐蝕性研究[J]. 太原 理工大學(xué)學(xué)報,2019,50(2):212-221.
[99] 何雙,李高陽(yáng),譚煥. 黃桃氣調貯藏參數的優(yōu)化及對品質(zhì)的影響[J]. 現代農業(yè)科技,2019, 06:214-219.
[100] 謝庭輝. 山銀花莖中綠原酸的微波輔助提取工藝研究[J]. 現代農業(yè)科技,2019,05: 227-228.
[101] 田野,殷中瓊,唐茜. 紫嫣茶中花青素水提工藝及其提取物抗癌活性[J]. 安徽農業(yè)大學(xué) 學(xué)報,2019,46(1):1-6.
[102] 李洪燕,趙紅梅,楊艷君. 藜麥山藥燕麥南瓜營(yíng)養粉制備工藝[J]. 山西農業(yè)科學(xué) 2019, 47(3):453-456.
[103] 張恩銘,鄭霞,丑維新,等. 基于劃口預處理的不同品種核桃破殼分析研究[J]. 農機化研究,2019,12:22-36.
[104] 何永強,賀俊林,楊作梅,等. 犁體曲面離散元仿真試驗與參數優(yōu)化[J]. 農機化研究, 2019,12:22-36.
[105] 杜強,賈麗艷. SPSS 統計分析從入門(mén)到精通[M]. 北京:人民郵電出版社,2009.
[106] 高連興,回子健,董華山,等. 三滾式小區育種花生脫殼機設計與試驗[J]. 農業(yè)機械學(xué) 報,2016,47(7):159-165.
[107] 易克傳,李立和,李慧,等. 雙滾筒氣力循環(huán)式花生脫殼機的性能試驗[J]. 南京農業(yè)大 學(xué)學(xué)報,2013,(03):124-128.
[108] Blevins R L,Thomas G W,Smith M S,et cl. Changes in soil properties after 10 years continuous non-tilled and conventionally tilled com[J]. Soil and Tillage Research,1983,(3): 135-146.
[109] Ferreras L A.Effect of no-tillage on some soil physical properties of a structural degraded Petrocalcic Paleudoll of the southern"Pampa"Of Argentina[J].Soil and Tillage Research, 2000,54:31-39.
[110] 周興祥,高煥文,劉曉峰. 華北平原一年兩熟保護性耕作體系試驗研究[J]. 農業(yè)工程學(xué) 報,2001,17(6):841-843.
[111] 杜兵,李問(wèn)盈,鄧健,等.保護性耕作表土作業(yè)的田間試驗研究[J].中國農業(yè)大學(xué)學(xué)報, 2000,(4):65-67.
[112] 陳濱. 分析動(dòng)力學(xué)[M]. 北京:北京大學(xué)出版社,1987.
[113] 張智泓,佟金,陳東輝,等. 不同材質(zhì)仿生凸齒鎮壓器滾動(dòng)件的模態(tài)分析[J]. 農業(yè)工程 學(xué)報,2012,28(13):8-17.
[114] 程小龍,劉俊峰,李建平,等. 基于 ANSYS Workbench 的乘坐式割草機刀盤(pán)模態(tài)分析[J]. 農機化研究,2015,(6):60-65.
[115] 李發(fā)宗,童水光,王相兵. 基于模態(tài)分析的液壓挖掘機工作裝置動(dòng)態(tài)優(yōu)化設計[J]. 農業(yè) 機械學(xué)報,2014,45(4):28-38.
[116] 陳樹(shù)人,韓紅陽(yáng),陳剛,等. 噴桿噴霧機機架動(dòng)態(tài)特性分析與減振設計[J]. 農業(yè)機械學(xué) 報,2013,44(4):50-56.
[117] 彭才望,孫松林,譚興斌,等. 基于 ANSYS Workbench 的中型深松鏟仿真分析與研究[J]. 中國農機化學(xué)報,2017,38(9):14-18.
[118] 劉東,肖宏儒,金月,等. 基于 ANSYS 的雞毛菜收獲機割臺部分振動(dòng)模態(tài)分析[J]. 農 機化研究,2019,10:15-19.
[119] 朱海燕,張立新,王歡,等. 蘆葦機械式打捆機壓縮機構的偏置式曲柄應力及模態(tài)分析 [J].機械設計與研究,2018,34(4):186-189.
[120] 姚宏,彭亞黎,劉祖國,等. 基于 ANSYS 的高速軸齒輪結構有限元靜應力及模態(tài)分析 [J].湖北工程學(xué)院學(xué)報,2018,38(6):106-110.
[121] JB/T7864-1999《旱田中耕追肥機試驗方法》[S].
[122] 葛云,張立新,谷家偉,等. 對輥式紅花采收裝置參數優(yōu)化及試驗[J]. 農業(yè)工程學(xué)報, 2015,31(21):35-42.
[123] 陳海濤,明向蘭,劉爽,等. 廢舊棉與水稻秸稈纖維混合地膜制造工藝參數優(yōu)化[J]. 農 業(yè)工程學(xué)報,2015,31(13):292-300.
[124] 張順,夏俊芳,周勇,等. 氣力滾筒式水稻直播精量排種器排種性能分析與田間試驗[J] 農業(yè)工程學(xué)報,2017,33(3):14-23.
[125] 陶桂香,衣淑娟,汪春,等. 水稻缽盤(pán)精量播種機充種性能試驗[J]. 農業(yè)工程學(xué)報,2013, 29(8):44-50.
[126] 王金峰,高觀(guān)保,翁武雄,等. 水田側深施肥裝置關(guān)鍵部件設計與試驗[J]. 農業(yè)機械學(xué) 報,2018,49(6):92-104.
[127] 楊然兵,張翔,李建東,等. 錐體帆布帶式排種器參數優(yōu)化與試驗[J]. 農業(yè)工程學(xué)報, 2016,32(3):6-13.
[128] 陳樹(shù)人,蔣成寵,姚勇,等. 水稻秸稈壓塊熱值模型構建及其影響因子相關(guān)性分析[J]. 農業(yè)工程學(xué)報,2014,30(24):200-208.
[129] 徐仲儒. 試驗回歸設計[M]. 黑龍江:黑龍江科技出版社,1998. [130] 葛宜元,梁秋艷,王桂蓮. 試驗設計方法與 Design-Expert 軟件應用[M]. 哈爾濱:哈 爾濱工業(yè)大學(xué)出版社,2015.