24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
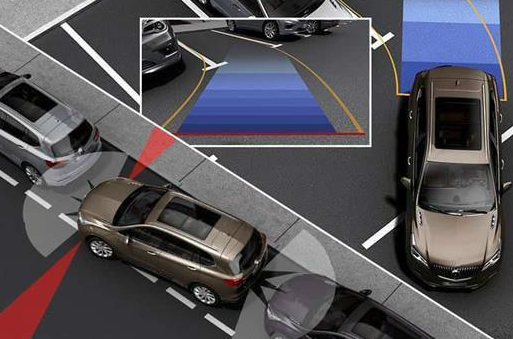
倒車(chē)雷達又稱(chēng)泊車(chē)輔助系統,是汽車(chē)泊車(chē)安全輔助裝置,能以聲音或者更為直觀(guān)的顯示告知駕駛員周?chē)系K物的情況,解除了駕駛員泊車(chē)和起動(dòng)車(chē)輛時(shí)前后左右探視所引起的困擾,并幫助駕駛員掃除了視野死角和視線(xiàn)模糊的缺陷,提高了安全性。一般由超聲波傳感器(俗稱(chēng)探頭)、控制器和顯示器等部分組成,現在市場(chǎng)上的倒車(chē)雷達大多采用超聲波測距原理,駕駛者在倒車(chē)時(shí),啟動(dòng)倒車(chē)雷達,在控制器的控制下,由裝置于車(chē)尾保險杠上的探頭發(fā)送超聲波,遇到障礙物,產(chǎn)生回波信號,傳感器接收到回波信號后經(jīng)控制器進(jìn)行數據處理,判斷出障礙物的位置,由顯示器顯示距離并發(fā)出警示信號,得到及時(shí)警示,從而使駕駛者倒 車(chē)時(shí)做到心中有數,使倒車(chē)變得更輕松。倒車(chē)雷達的提示方式可分為液晶、語(yǔ)言和聲音三種;接收方式有無(wú)線(xiàn)傳輸和有線(xiàn)傳輸等。本方案采用語(yǔ)音提示的方式,本文介紹了以SPCE061A單片機為核心的一種低成本、高精度、微型化,并有數字顯示和聲光報警功能的倒車(chē)雷達系統。利用SPCE061A 單片機所具備的單芯片語(yǔ)音功能,外接三個(gè)超聲波測距模組,組成一個(gè)示例的倒車(chē)雷達系統,語(yǔ)音提示報警(0.35m~1.5m)范圍內的障礙物。
關(guān)鍵詞:倒車(chē)雷達 超聲波 單片機SPCE061A
abstract
Reverse radar, also known as parking aid system, is a parking safety aid device, which can tell the driver the situation of obstacles around with sound or more intuitive display, relieve the driver from the trouble caused by front and rear left and right visits when parking and starting the vehicle, and help the driver to eliminate the defects of blind angle and blurred vision, so as to improve the safety. Generally, it is composed of ultrasonic sensor (commonly known as probe), controller and display. At present, most of the reversing radars in the market use the principle of ultrasonic ranging. When the driver is backing up, he starts the reversing radar. Under the control of the controller, the probe installed on the bumper at the rear of the car sends the ultrasonic wave, encounters obstacles, generates the echo signal, and the sensor receives the echo signal After No.1, the controller processes the data, judges the position of the obstacle, displays the distance by the display and sends out the warning signal, so as to get the warning in time, so that the driver can know well when backing up and make backing up easier. The warning mode of reversing radar can be pided into LCD, language and sound; the receiving mode includes wireless transmission and wired transmission. This project adopts voice prompt. This paper introduces a kind of reversing radar system with low cost, high precision, miniaturization, digital display and sound light alarm function, which is based on SPCE061A single chip microcomputer. By using the single chip voice function of SPCE061A single chip microcomputer and three ultrasonic distance measurement modules, an example reversing radar system is composed, which can prompt the obstacles within the range of alarm (0.35m ~ 1.5m) by voice.
Key words: reversing radar ultrasonic MCU SPCE061A
目錄
第一章 前言
倒車(chē)雷達又稱(chēng)泊車(chē)輔助系統,是汽車(chē)泊車(chē)安全輔助裝置,能以聲音或者更為直觀(guān)的顯示告知駕駛員周?chē)系K物的情況,解除了駕駛員泊車(chē)和起動(dòng)車(chē)輛時(shí)前后左右探視所引起的困擾,并幫助駕駛員掃除了視野死角和視線(xiàn)模糊的缺陷,提高了安全性。
一般由超聲波傳感器(俗稱(chēng)探頭)、控制器和顯示器等部分組成,現在市場(chǎng)上的倒車(chē)雷達大多采用超聲波測距原理,駕駛者在倒車(chē)時(shí),啟動(dòng)倒車(chē)雷達,在控制器的控制下,由裝置于車(chē)尾保險杠上的探頭發(fā)送超聲波,遇到障礙物,產(chǎn)生回波信號,傳感器接收到回波信號后經(jīng)控制器進(jìn)行數據處理,判斷出障礙物的位置,由顯示器顯示距離并發(fā)出警示信號,得到及時(shí)警示,從而使駕駛者倒 車(chē)時(shí)做到心中有數,使倒車(chē)變得更輕松。
倒車(chē)雷達的提示方式可分為液晶、語(yǔ)言和聲音三種;接收方式有無(wú)線(xiàn)傳輸和有線(xiàn)傳輸等。本方案采用語(yǔ)音提示的方式,利用SPCE061A 單片機所具備的單芯片語(yǔ)音功能,外接三個(gè)超聲波測距模組,組成一個(gè)示例的倒車(chē)雷達系統,語(yǔ)音提示報警(0.35m~1.5m)范圍內的障礙物。
第二章 實(shí)現功能
利用SPCE061A單片機、三個(gè)超聲波測距模組實(shí)現超聲波倒車(chē)雷達,要求具有下述功能:
1.可以語(yǔ)音提示模組探測范圍內(0.35m~1.5m)的障礙物;
2.語(yǔ)音提示可指明哪一個(gè)方向(或區域)有障礙物在探測范圍內;
3.利用三個(gè)LED發(fā)光二極管表示三個(gè)傳感器探測范圍內是否有障礙物,當在探測范圍內有障礙物時(shí),發(fā)光二極管以一定頻率閃爍,閃爍的頻率以距離定,距離越近頻率越高。
本方案要求所有的語(yǔ)音資源、程序代碼都存放在一顆SPCE061A片內Flash當中;當語(yǔ)音播報時(shí),如檢測到左后方有障礙物,則用語(yǔ)音播放:"左后方",如右后方有障礙物,則語(yǔ)音播方"右后方";當檢查到中間的傳感器探測范圍內有障礙特時(shí),語(yǔ)音播放:"后方".而連續播放提示的間隔,要大于或等于3秒,以免過(guò)于頻繁的播報語(yǔ)音。
第3章核心器件簡(jiǎn)介
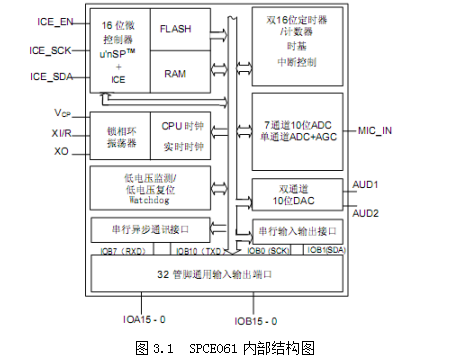
3.1SPCE061A
3.1.1SPCE061A簡(jiǎn)介
3.1.2芯片特性
3.2SPCE061A精簡(jiǎn)開(kāi)發(fā)板
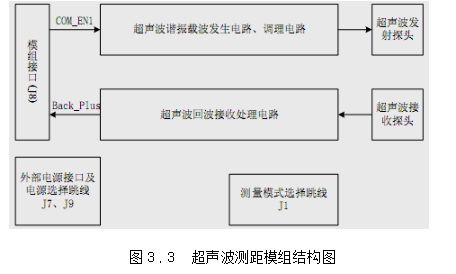
3.3超聲波測距模組
3.4轉接板
第4章系統總體方案
第5章系統硬件設計
5.1SPCE061A精簡(jiǎn)開(kāi)發(fā)板電路原理
5.1.1SPCE061最小系統
5.1.2電源模板
5.1.3放音模板
5.2超聲波測距模組電路原理
5.2.1超聲波諧振頻率發(fā)生電路、調理電路
5.2.2超聲波回波接受處理電路
5.2.3超聲波測距模組電源接口
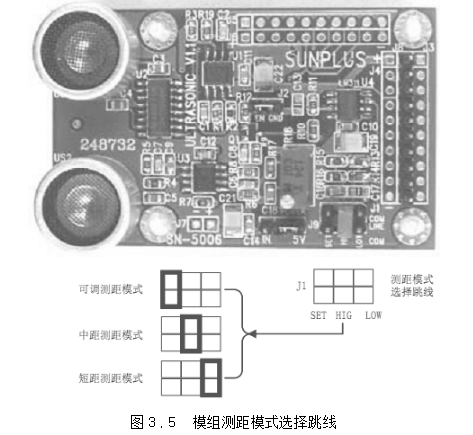
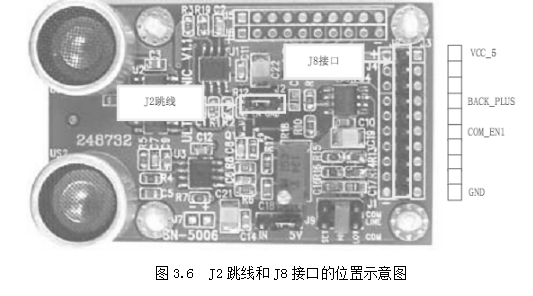
5.2.4超聲波測距模式選擇跳線(xiàn)
5.2.5超聲波測距模組接口
5.3轉接板電路
5.4顯示電路
第6章系統軟件設計
6.1超聲波測距原理
6.2軟件結構
6.3各模塊程序說(shuō)明
6.3.1超聲波測距程序
6.3.2語(yǔ)音播放程序
6.3.3顯示刷新程序
6.3.4主程序
第7章連接與操作說(shuō)明
參考文獻
致 謝
首先衷心地感謝我的導師,畢業(yè)設計從選擇課題到完成論文,從理論原理的講解到實(shí)際問(wèn)題的解決,飽含著(zhù)老師的心血他們嚴謹細致、一絲不茍的作風(fēng)一直是我工作、學(xué)習中的榜樣。老師的悉心指導和建議給了我極大的幫助和支持,使我受益匪淺。在論文即將完成之際,我的心情無(wú)法平靜,從開(kāi)始進(jìn)入課題到論文的順利完成,老師、同學(xué)、給了我無(wú)言的幫助,在這里請接受我誠摯的謝意!
(如您需要查看本篇畢業(yè)設計全文,可點(diǎn)擊全文下載進(jìn)行查看)