24РЎ•r(shЁӘ)Х“ОД¶ЁЦЖҹбҫҖ(xiЁӨn)
24РЎ•r(shЁӘ)Х“ОД¶ЁЦЖҹбҫҖ(xiЁӨn)
ХӘТӘ
ЎЎЎЎ·Җ¶ЁЖҪЕ_КЗАыУГӮчёРЖчІЙјҜЭdуwөДЯ\„У(dЁ°ng)ЧЛ‘B(tЁӨi)РЕПўІўҝШЦЖХ{ЖҪК№·Җ¶ЁҢҰПуПаҢҰМШ¶ЁҝХйgЧшҳЛұЈіЦДіТ»·ҪО»·Җ¶ЁөДСbЦГ,КЗ¬Fҙъ№ӨіМ‘ӘУГөДЦШТӘФOёч,ҸV·әөШ‘ӘУГУЪәҪҝХ,ОдЖч»рҝШПөҪyәНАЧЯ_ЖҪЕ_өИЎЈбҳҢҰәЈЙПҫИФ®ЦР’ҒАKЖчҫИФ®іЙ№ҰВКөНПВөДҶ–(wЁЁn)о},МбіцҢў·Җ¶ЁЖҪЕ_‘ӘУГУЪҫИЦъҙ¬ҫoјұҫИЦъ’ҒАKПөҪy,WұЈЧC’ҒАKЖчөД’ҒЙдҫ«¶И,ЯM(jЁ¬n)¶шұЈЧCҫИФ®іЙ№ҰВКЎЈ·Җ¶ЁЖҪЕ_ДЬ·сУРР§өЦПыҙ¬уwҢҰ’ҒАKЖчөД”_„У(dЁ°ng)У°н‘ИЎӣQУЪҝШЦЖПөҪyөДРФДЬ,ТтҙЛұҫОДЦчТӘй_(kЁЎi)Х№°ьАЁЬӣјюПөҪyәНУІјюЎ¶ҪyөДҝШЦЖПөҪyФOУӢ,һйСР°l(fЁЎ)НкЖРөДҫИЦъПөҪyөм¶ЁБјәГөД»щөAЎЈ
ЎЎЎЎОДЦРҪйҪBБЛ·Җ¶ЁЖҪЕ_ПөҪyөДҪYҳӢҪгіЙ,ЦчТӘ°ьАЁЖҪЕ_өД0РНҙ®В“(liЁўn)ҷCРөҪYҳӢМШьc(diЁЈn)ЎўINS/GPSҪгәПЧЛ‘B(tЁӨi)ңyБҝПөҪyәНҢҰЖҪЕ_·Җ¶ЁҝШЦЖҫ«¶И®a(chЁЈn)ЙъУ°н‘өДТтЛШЎЈй_(kЁЎi)°l(fЁЎ)·Җ¶ЁЖҪЕ_ЬӣјюҝШЦЖПөҪy,ПөҪyІЙјҜҙ¬уwөДЯ\„У(dЁ°ng)ЧЛ‘B(tЁӨi)РЕПў,ҢҰІЙјҜөД”ө“ю°ьЯM(jЁ¬n)РРҪвҙaІў“QЛгһйҢҚ(shЁӘ)лHҪЗ¶И,ҢўҢҚ(shЁӘ)лHҪЗ¶ИЕcлҠҷCЮDЛЩҪЁБў‘ӘУГДЈРН,НЁЯ^(guЁ°)ФOУӢPIХ{№қЖчҢҚ(shЁӘ)¬FҢҰХ{ЖҪлҠҷCөДҝШЦЖ,ЧоәуК№УГҫҺіМЬӣјюәН·ВХжЬӣјюВ“(liЁўn)әПҢҰіМРтЯM(jЁ¬n)РРФЪҫҖ(xiЁӨn)ҢҚ(shЁӘ)•r(shЁӘ)·ВХжХ{ФҮ,WөГөҪБјәГөДҝШЦЖіМРтЎЈИ»әу,»щУЪЦчҝШИМЖ¬ATmegal6ФOУӢ·Җ¶ЁЖҪЕ_УІјюҝШЦЖПөҪy,°ьАЁЗ°ПтНЁөАҪУФ»лҠВ·ЎўәуПтНЁөАҪУФ»лҠВ·ЎўИЛҷCҪ»»ҘНЁөАҪУҝЪХJј°”ө“юНЁРЕҪУҝЪлҠВ·,ІўК№УГProtelАLЦЖлҠВ·°еІјҫҖ(xiЁӨn)ҲD,Ҫӣ(jЁ©ng)Я^(guЁ°)ЖШ№вЎўп@У°ЎўОgҝМЎўг@ҝЧЎўәёҪУөИМҺАнЦЖЧчPCBлҠВ·°еЎЈЧоәу,К№УГБщЧФУЙ¶Иҙ¬І°ДЈ”MЖчһй¶юЧФУЙ¶И·Җ¶ЁЖҪЕ_МṩҷM“uј°ҝv“uөДЯ\„У(dЁ°ng)ЧЛ‘B(tЁӨi),ңyФҮЖҪЕ_өД·Җ¶ЁРФДЬЎЈҢҚ(shЁӘ)тһұнГч,®”ҙ¬уwЯ\„У(dЁ°ng)ЧЛ‘B(tЁӨi)өД»Ҝ„У(dЁ°ng)Я_өҪ7ёА,·Җ¶ЁЖҪЕ_ДЬұЈіЦФЪ2.6°·¶ҮъғИ,·Җ¶ЁРФДЬКЬөҪҷCРөҪYҳӢХ`ІоЎўҝШЦЖЛг·ЁөДПЮЦЖЎЈ
ЎЎЎЎкP(guЁЎn)жIФ~Јә·Җ¶ЁЖҪЕ_;ҶОЖ¬ҷC;PIҝШЦЖ;ЬӣјюПөҪy;УІјюПөҪy
ABSTRACT
ЎЎЎЎStable platform is a kind of device which is used to keep an object stabilhy relative to a specific space coordinate. It can adjust the balance by collecting the motion information about vector and controlling the mol;or. It is important for modem engineering equipment,widely used in aviation, fire control systhms of weapons and radar platfbrms Aiming at the problem of low success rate of throwing rope isescue in marine rescue, this paper prstents the application of stable platfbrm th the emergency rescue rope-thrower system 0n rescue ship, to ensure the accuracy of projectile and 1;he success rate of rescue. Stable platform can effectively offset the movement of the hull depends 0n the performsnce of the COntrol system when the line-thrower laimch. Therefbise,this paper design control system, including software and hardware sysbms, which lay a good foundation for the development of a sound rescue systhm.
ЎЎЎЎIn the paper, the mechanical strucUire of s1:able platform is introduced. It includes the charaUeristics of 1;he mechanical structure of the 0-series platfbrm,INS/GPS Measurement System and the factors affecting the accuracy of stable platform. The software control syst;ems of stable platform is developed. The system collects the information of the huirs movement. Then, the data packets are decoded and COnverted into the actual angle. The mathematical model between the actual angle and the motor speed is established, which is used to design the PI regulator to control the mothr. Finally, the program is debugged and worked with online realtime simulation combine programming software and simulation software. The hardware control syskm of the stabilized platform is designed based on ATmegal6. It ineludes a forward channel interface circuit, a backward channel in1;erface circuit,a humaivcompiiter interaction channel interface and a data communications interface circuits. And the PCB circuit board is made, after drawing circuit board wiring diagram by Protel,exposure,development, etching,drilling, welding. Finally,tee six DOF Ship Simulator is used to provide rolling and pishing motion to test two DOF stable platform.Experimental results show teat sthble platform can be maintained in the range of 2.6 degrees when tee ship reaches 7 degrees. The performance is still limited by the mechanical structure error and the control algorithm.
ЎЎЎЎKey words: stabilized platform; SCM; PI control; software system; hardware system
ЎЎЎЎ·Җ¶ЁЖҪЕ_КЗ¬Fҙъ№ӨіМ‘ӘУГөДЦШТӘФOӮд,ҸV·әөШ‘ӘУГУЪәҪҝХЎўОдЖч»рҝШПөҪyЎўАЧЯ_ЖҪЕ_өИ,ҸДЧоіхөДЬҠУГФOӮдЦрқu°l(fЁЎ)Х№һйГсУГЎЈЦчТӘКЗАыУГӮчёРЖчІЙјҜЭdуwөДЯ\„У(dЁ°ng)ЧЛ‘B(tЁӨi)РЕПўЯM(jЁ¬n)РРҝШЦЖХ{ЖҪК№ұ»·Җ¶ЁҢҰПуФЪПаҢҰМШ¶ЁҝХйgЧшҳЛұЈіЦДіТ»·ҪО»»т¶а·ҪО»өД·Җ¶ЁЎЈ
ЎЎЎЎИ«Зтҡвәт®җіЈЎўоl°l(fЁЎ)өДҸҠЕ_пL(fЁҘng)ЎўНЁәҪӯh(huЁўn)ҫіИХТжҸНлsҢ§ЦВЛ®ЙПЦШҙуН»°l(fЁЎ)°ІИ«КВ№КйL(chЁўng)ЖЪФЪёЯО»ЕЗ»ІЎЈҪь°ЩДкҒн(lЁўi),ұM№Ь¬FҙъҝЖҢW(xuЁҰ)јјРg(shЁҙ)ҸV·әөШ‘ӘУГУЪәҪЯ\ҳI(yЁЁ)К№өГҙ¬І°°ІИ«ұЈХПФOК©І»”аНкЙЖ,ТФј°НЁЯ^(guЁ°)ҮшлH№«јsЎўРРҳI(yЁЁ)ЦёДПЎўҸҠЦЖРФјјРg(shЁҙ)ТҺ·¶өИҸҠ»Ҝҙ¬І°°ІИ«№ЬАн,әҪЯ\°ІИ«ҝӮуwЛ®ЖҪіЦАmІ»”аөШМбёЯ,әЈлyИФлyТФұЬГвТФЎЈәҪЯ\ј°ЖдЛыәЈЙПЙъ®a(chЁЈn)»о„У(dЁ°ng)ФҪ°l(fЁЎ)Х№,ҙ¬І°әНЖдЛыәЈЙПФOК©ұЈУГБҝФҪ¶а,әҪҙОТІФҪ¶а,°l(fЁЎ)ЙъәЈлyөДҙО”өТІФҪ¶аЎЈ“юҪyУӢ,ОТҮш1949ДкЦБ1984Дк№ІҫИЦъ969ҙО,ҫщГҝДкҫИЦъ26.9ҙО,1985ДкЦБ1990Дк№ІҫИЦъ365ҙО,ЖҪҫщГҝДкҫИЦъ60.8ҙО,1991ДкЦБ1999Дк№ІҫИЦъ969ҙО,ЖҪҫщГҝДк107.7ҙО,әЈлyөДДк°l(fЁЎ)ЙъҙО”өлSЦш(zhЁҙ)әҪЯ\әНЖдЛыәЈЙПЙъ®a(chЁЈn)»о„У(dЁ°ng)өД°l(fЁЎ)Х№¶шүҲјУЎЈ
ЎЎЎЎІўЗТ,лSЦш(zhЁҙ)Ҫӣ(jЁ©ng)қъөД°l(fЁЎ)Х№,ҙ¬І°Ъ…УЪҙуРН»ҜЎўШӣОпЖ··NФцјУЎўШӣЦөМбёЯЎўҙ¬ЭdИјРд”өБҝФцјУЎўУР¶ҫУРәҰШӣОпЖ··NәН”өБҝүҲ¶а,Т»ө©°l(fЁЎ)ЙъәЈлy,НщНщ•ю(huЁ¬ )ФміЙҫЮҙуөД“pК§әНҮАЦШөДәу№ы,УИЖдКЗҢҰӯh(huЁўn)ҫіөД“pәҰТФЎЈЯ@ЕcОТҮшәҪЯ\ҳI(yЁЁ)әНЖдЛыәЈЙПЙъ®a(chЁЈn)»о„У(dЁ°ng)өД°l(fЁЎ)Х№Ъ…„ЭПаОЗәПөДЎЈ
ЎЎЎЎәЈЙПҫИЦъКЗәҪЯ\ҳI(yЁЁ)әНЖдЛыәЈЙПҳI(yЁЁ)„Х(wЁҙ)өДСУЙмРиТӘЎЈәҪЯ\КЗёЯпL(fЁҘng)лUРРҳI(yЁЁ),УРәҪЯ\ҫНУРәЈлy,УРәЈлyҫНРиТӘәЈЙПҫИЦъЎЈәЈЙПУцлUәНәЈлyНЁіЈКЗФЪҙ¬І°ҹo(wЁІ)·ЁЧФҫИөДЗйӣrПВөДёч·NОЈлU,Я@·NЗйӣrөДЯM(jЁ¬n)Т»ІҪ°l(fЁЎ)Х№ҢўҢ§ЦВҙ¬І°»тЖдЛыШ”®a(chЁЈn)өД“pК§»тҢҰӯh(huЁўn)ҫіФміЙ“pәҰ»тИЛГьӮыНц,ҢЩУЪҫoјұЗйӣr,Ц»УРөГөҪұMҝмөДҫИЦъ,ІЕДЬ”[Г“ҫoЖИөДОЈлU,Лщ?әЈЙПҫИЦъұШнҡКЗј°•r(shЁӘ)өДЎЈәЈЙПҫИЦъЦчТӘөД·ҪКҪ°ьАЁәЈЙПНПәҪЎў¶ВВ©ЎўНПң\ЎўәЈЙПР¶ЭdЎўңз»рЎўәЈЙПҫИЙъөИТФЎЈёщ“юәЈлyөДІ»Н¬Зйӣr,ёч·NҫИЦъ·ҪКҪҝЙҶОӘҡК№УГ»тН¬•r(shЁӘ)К№УГТФЎЈҗәБУәЈӣrПВ,НщНщҹo(wЁІ)·ЁҝҝҪьУцлUҙ¬Ц»,ФЪҢҚ(shЁӘ)К©ҫИФ®Я^(guЁ°)іМЦРНПҺ§ҫИЦъКЗұЈЧCИЛГьј°Ш”®a(chЁЈn)Н¬•r(shЁӘ)«@ҫИөДЧоУРР§·Ҫ·ЁЦ®Т»,јsХјҫИЦъЧчҳI(yЁЁ)өД90%ТФЙПФЪОТҮшәЈлyҫИЦъЦРұ»ҸV·ә‘ӘУГЎЈНПҺ§ҫИЦъөЪТ»ІҪҫНКЗУГЖІлuҳҢҢўТэА|°l(fЁЎ)ЙдөҪУцлUҙ¬ЙП,УЙУЪҫИЦъ•r(shЁӘ)ПЮөДТӘЗу,ДЬ·сҝмЛЩУРР§өДҢўҺ§ҫSңКҙ_өД°l(fЁЎ)ЙдөҪКЬлyҙ¬Ц»КЗұЈХПНПҺ§ҫИЦъіЙ№ҰәНМбёЯҫИЦъР§ВКөДкP(guЁЎn)жI,ЦұҪУкP(guЁЎn)ПөөҪИЛЙнәНШ”®a(chЁЈn)°ІИ«,ЖІА|ҳҢөДҝмЛЩЎўҫ«НлӣQ¶ЁБЛҫИЦъөДР§№ыЎЈӮчҪyөДТэА|·ҪКҪКЗУЙҫИЦъИЛҶTКЦ„У(dЁ°ng)ІЩЧчЖІА|ҳҢЯM(jЁ¬n)РРөД,ТэА|іЙ№ҰЕc·сәЬҙуіМ¶ИЙПТАЩҮ(lЁӨi)УЪІЩЧчИЛҶTөДҪӣ(jЁ©ng)тһ,ФЪпL(fЁҘng)ЖҪАЛмo»тХЯөНөИјүәЈӣrПВ,¬FУРЖІА|ҳҢТэлuР§№ып@Цш(zhЁҙ),іЙ№ҰВКәЬёЯ,ІўЗТІЩЧчәҶ(jiЁЈn)ҶО,ҝмЛЩұгҪЭ,ҢҚ(shЁӘ)һйТ»·Nғһ(yЁӯu)БјөДТэлu·ҪКҪЎЈө«лSЦш(zhЁҙ)ӯh(huЁўn)ҫіТтЛШөДІ»Н¬,әЈӣrЧғөГёьјУҗәБУ,ҙ¬І°“u»О„ЎБТ,ҙ¬І°ҷM“uҪЗ¶ИЙхЦБДЬүтЯ_өҪ,ҫИЦъИЛҶTФЪҫSіЦұҫЙнөДЖҪәвөДН¬•r(shЁӘ)ҫНәЬлyұЈЧCЖІҫYҳҢөД·Җ¶Ё,јУЦ®җәБУәЈӣrПВпL(fЁҘng)БҰЭ^ҸҠ,ұШИ»•ю(huЁ¬ )ҮАЦШУ°н‘’ҒЙдҫалxЎў’ҒЙдҫ«ңК¶ИөИ,ЦВК№ТэА|іЙ№ҰВКјұ„ЎПВҪөЎЈ¶шЗТҗәБУәЈӣrПВҫИЦъҙ¬әујЧ°еЙПАЛҮАЦШ,ҫИЦъИЛҶTөДЙъГь°ІИ«КЬөҪҮАЦШНюГ{ЎЈИзәОФЪҗәБУәЈӣrПВҝмҪЭУРР§өШһйУцлUҙ¬Ц»ТэА|іЙһй®”ҪсҫИЦъҙтВУҪ繫ХJөДлyо}Ц®Т»ЎЈ
ЎЎЎЎҗәБУәЈӣrөДЧоЦұҪУұн¬FҫНКЗҸҠпL(fЁҘng)әНҙ¬І°өД„ЎБТ“u»О,Я@ТІКЗУ°н‘җәБУәЈӣrПВДЬ·сТэлuіЙ№ҰөДғЙӮҖ(gЁЁ)кP(guЁЎn)жIТтЛШtisiЎЈТӘМбёЯҗәБУәЈӣrПВЖІА|ҳҢТэлuіЙ№ҰВКҫНКЧПИТӘҪвӣQЯ@ғЙӮҖ(gЁЁ)ЦчТӘҶ–(wЁЁn)о}ЎЈКЧПИТӘҷzңyҸ—уwФЪЗ§”_ЧчУГПВЖ«лxіхКјЙдПтөДҪЗ¶ИҙуРЎәН·ҪО»»тХЯКЗҪЗЛЩ¶ИҙуРЎәН·ҪО»И»әуІЙУГҝШЦЖПөҪyҢҰЙдПтХ`ІоЯM(jЁ¬n)РРРЮХэһйБЛҝЛ·юҙ¬І°„ЎБТ“u»ОҺ§Ғн(lЁўi)өДІ»·Җ¶ЁРФ,ҪoЖІАKҳҢТ»ӮҖ(gЁЁ)·Җ¶ЁөД’ҒЙдЖҪЕ_,ҫНРиТӘФЪҙ¬ЙП°ІСbТ»ӮҖ(gЁЁ)·Җ¶ЁЖҪЕ_,УГҒн(lЁўi)Сaғ”ҙ¬І°өД„ЎБТ“u»О,К№ЖІА|ҳҢјҙК№ФЪҗәБУәЈӣrПВТІДЬПспL(fЁҘng)ЖҪАЛмo•r(shЁӘ)·Җ¶Ё°l(fЁЎ)ЙдЎЈҙ¬І°әҪРР•r(shЁӘ)ҫЯУРҷM“uЎўҝv“uЎўр^“uЎўҙ№КҺЎўҷMКҺЎўҝvКҺБщӮҖ(gЁЁ)ЧФУЙ¶ИөД“uКҺЯ\„У(dЁ°ng)ЎЈФЪҙупL(fЁҘng)АЛөИҗәБУәЈӣrПВ,һйұЈЧC’ҒЙдЖчөД·Җ¶Ёӯh(huЁўn)ҫі,ЦчТӘҝј‘]ҙ¬І°өДҷM“uЎўҝv“uәНҫw“u,ІЙУГHЧФУЙ¶И·Җ¶ЁЖҪЕ_Пыіэҙ¬І°ЧЛ‘B(tЁӨi)У°н‘ҸҠпL(fЁҘng)ҢҰЖІА|ҳҢТэлu®a(chЁЈn)ЙъөДУ°н‘ЦчТӘКЗ•ю(huЁ¬ )К№ҫИФ®Ҹ—ФЪпwРРЯ^(guЁ°)іМЦРЖ«лxјИ¶ЁөДҸ—өА,К№ҫИФ®Ҹ—өДВдьc(diЁЈn)ІоЙъЭ^ҙуөДХ`Іо,ТӘПыіэҸҠпL(fЁҘng)ҢҰТэА|ІЩЧчҺ§Ғн(lЁўi)өДІ»АыУ°н‘,РиТӘҪӣ(jЁ©ng)Я^(guЁ°)УӢЛгҪoЖІА|ҳҢоAПИФO¶ЁТ»ӮҖ(gЁЁ)°l(fЁЎ)ЙдЖ«ҪЗ(°l(fЁЎ)Йд·ҪО»ҪЗ),Сaғ”ҸҠпL(fЁҘng)ФміЙөДЖ«ІоЎЈФЪҢҚ(shЁӘ)лHҫИФ®ЦР,Ц»УРҪӣ(jЁ©ng)тһ·ЗіЈШSё»өДІЩЧчИЛҶTІЕДЬХэҙ_өД°СОХ°l(fЁЎ)ЙдЖ«ҪЗЎЈө«КЗУ°н‘°l(fЁЎ)ЙдЖ«ҪЗөДЦчТӘТтЛШУРпL(fЁҘng)БҰЎўпL(fЁҘng)ПтЎўҫалxЎў’ҒЙдҪЗөИ,Из№ыОТӮғНЁЯ^(guЁ°)АнХ“УӢЛгәНҙуБҝөДФҮтһДЬүтХТөҪ°l(fЁЎ)ЙдЖ«ҪЗәНпL(fЁҘng)БҰЎўпL(fЁҘng)ПтЎўҫалxЎў’ҒЙдҪЗөИ…ў”өЦ®йgөДәҜ”өкP(guЁЎn)Пө,НЁЯ^(guЁ°)УӢЛгҷCёщ“юӯh(huЁўn)ҫі—lјюөДЧғ»ҜҢўЖІА|ҳҢІ»”аөШХ{ХыЦБЧојС°l(fЁЎ)ЙдЖ«ҪЗ,ДЗГҙОТӮғТІҫНҸШөЧЧғёпБЛӮчҪyөДТАҝҝИЛөДҪӣ(jЁ©ng)тһҒн(lЁўi)ЯM(jЁ¬n)РРЖІАKҳҢТэҫSөДІЩЧч·ҪКҪЎЈ
ЎЎЎЎҫИЦъ·Җ¶ЁЖҪЕ_ҝШЦЖПөҪyІҝ·Ц№ҰДЬңyФҮЈә
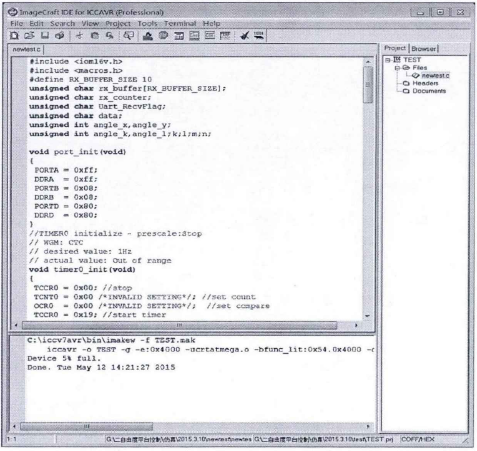
ICCAVRІЩЧчҪзГж
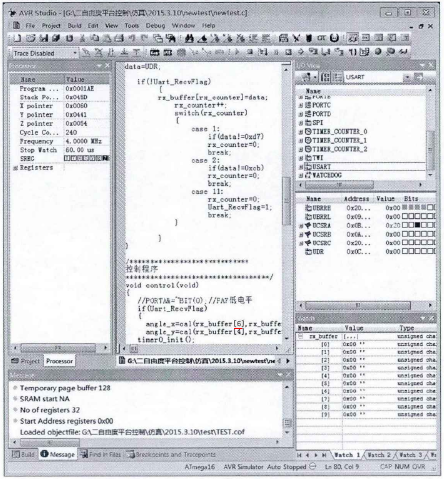
AYRЈ studioЈ ҪзГж

·[¶ЁЖҪЕ_№ӨЧчПөҪyәҶ(jiЁЈn)ҲD
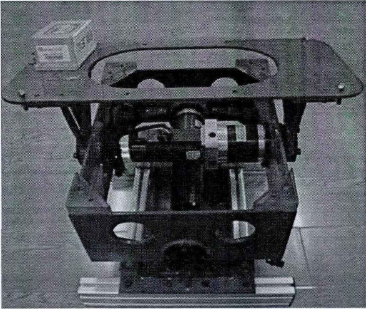
¶юЧФУЙ¶И·Җ¶ЁЖҪЕ_
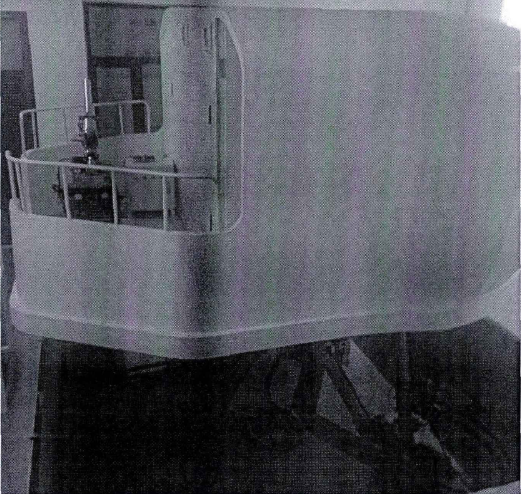
БщЧФУЙ¶Иҙ¬І°ДЈ”MЖч
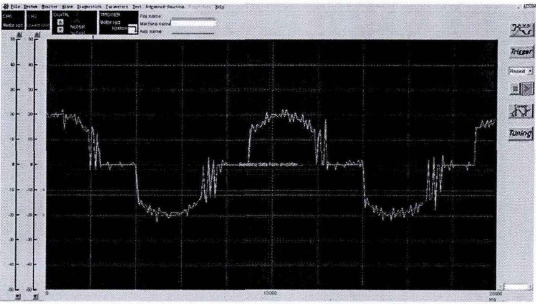
лҠҷCЮDЛЩЗъҫҖ(xiЁӨn)
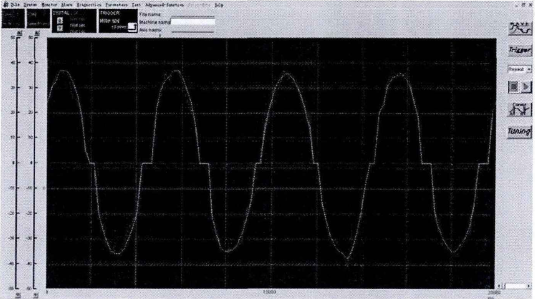
лҠҷCЮDЛЩЗъҫҖ(xiЁӨn)
Дҝдӣ
ЎЎЎЎөЪТ»ХВ ҫwХ“
ЎЎЎЎЎЎЎЎ1.1 Хnо}СРҫҝұіҫ°ј°ТвБx
ЎЎЎЎЎЎЎЎ1.2 ·Җ¶ЁЖҪЕ_ҮшғИНвСРҫҝ¬F о
ЎЎЎЎЎЎЎЎ1.3 ҝШЦЖјјРg(shЁҙ)СРҫҝ¬F о
ЎЎЎЎЎЎЎЎ1.4 Х“ОДөДСРҫҝ?jЁ¬)ИИЭј°ХВ№қ°ІЕ?br />
ЎЎЎЎөЪ¶юХВ ЖІА|ҫИЦъ·Җ¶ЁЖҪЕ_ПөҪy
ЎЎЎЎЎЎЎЎ2.1 ·Җ¶ЁЖҪЕ_ҪYҳӢ
ЎЎЎЎЎЎЎЎ2.2 ·Җ¶ЁЖҪЕ_өДРФДЬ
ЎЎЎЎЎЎЎЎ2.3 ҪMәП‘TРФңyБҝПөҪy
ЎЎЎЎЎЎЎЎ2.4 ·Җ¶Ёҫ«¶ИУ°н‘ТтЛШ
ЎЎЎЎЎЎЎЎ2.5 ұҫХВРЎҪY
ЎЎЎЎөЪИэХВ УІјюПөҪyФOУӢ
ЎЎЎЎЎЎЎЎ3.1 ЦчҝШРҫЖ¬ЯxРН
ЎЎЎЎЎЎЎЎЎЎЎЎ3.1.1 ҶОЖ¬ҷCЯxРН
ЎЎЎЎЎЎЎЎЎЎЎЎ3.1.2 ATmagel6ЎЎМШРФ
ЎЎЎЎЎЎЎЎ3.2 ҶОЖ¬ҷCлҠВ·ПөҪy
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.1 ЧоРЎ№ӨЧчПөҪy
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.2 З°ПтНЁөАҪУҝЪлҠВ·
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.3 әуПтНЁөАҪУҝЪлҠВ·
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.4 ИЛҷCҪ»»ҘНЁөАҪУҝЪлҠВ·
ЎЎЎЎЎЎЎЎЎЎЎЎ3.2.5 ”ө“юНЁРЕҪУҝЪлҠВ·
ЎЎЎЎЎЎЎЎ3.3 PCBлҠВ·°еЦЖЧч
ЎЎЎЎЎЎЎЎ3.4 ұҫХВРЎҪY
ЎЎЎЎөЪЛДХВ ЬӣјюПөҪyФOУӢ
ЎЎЎЎЎЎЎЎ4.1 ”ө“юІЙјҜј°МҺАн
ЎЎЎЎЎЎЎЎЎЎЎЎ4.1.1 ”ө“ю…f(xiЁҰ)Чh
ЎЎЎЎЎЎЎЎЎЎЎЎ4.1.2 ”ө“ю“QЛг
ЎЎЎЎЎЎЎЎЎЎЎЎ4.1.3 ”ө“юһVІЁ
ЎЎЎЎЎЎЎЎ4.2 ҝШЦЖЛг·Ё
ЎЎЎЎЎЎЎЎЎЎЎЎ4.2.1 PIҝШЦЖ
ЎЎЎЎЎЎЎЎЎЎЎЎ4.2.2 PIХ{№қЖч
ЎЎЎЎЎЎЎЎ4.3 іМРтҫҺЧgј°Х{ФҮ
ЎЎЎЎЎЎЎЎЎЎЎЎ4.3.1 ЬӣјюҫҺҢ‘(xiЁ§)
ЎЎЎЎЎЎЎЎЎЎЎЎ4.3.2 іМРт·ВХж
ЎЎЎЎЎЎЎЎ4.4 ұҫХВРЎҪY
ЎЎЎЎөЪОеХВ ҝШЦЖЖчҢҚ(shЁӘ)тһңyФҮ
ЎЎЎЎЎЎЎЎ5.1 ·Җ¶ЁЖҪЕ_№ӨЧчПөҪy
ЎЎЎЎЎЎЎЎЎЎЎЎ5.1.1 ҲМРРПөҪy
ЎЎЎЎЎЎЎЎЎЎЎЎ5.1.2 ЕдлҠПөҪy
ЎЎЎЎЎЎЎЎЎЎЎЎ5.1.3 ҝШЦЖПөҪy
ЎЎЎЎЎЎЎЎ5.2 ҢҚ(shЁӘ)тһЖҪЕ_
ЎЎЎЎЎЎЎЎ5.3 ҢҚ(shЁӘ)тһңyФҮ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.1 ңyБҝПөҪyЖҜТЖңyФҮ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.2 ңyБҝПөҪyёълSңyФҮ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.3 лҠҷCн‘‘ӘңyФҮ
ЎЎЎЎЎЎЎЎЎЎЎЎ5.3.4 ЖҪЕ_·Җ¶ЁРФДЬңyФҮ
ЎЎЎЎЎЎЎЎ5.4 ұҫХВРЎҪY
ЎЎЎЎөЪБщХВ ҝӮҪYЕcХ№Ны
ЎЎЎЎ…ўҝјОД«I
ЎЎЎЎЦВЦx
ЈЁИзДъРиТӘІйҝҙұҫЖӘ®…ҳI(yЁЁ)ФOУӢИ«ОДЈ¬ХҲДъВ“(liЁўn)ПөҝН·юЛчИЎЈ©