24小時(shí)論文定制熱線(xiàn)
![]()
24小時(shí)論文定制熱線(xiàn)
![]()
摘要:為適應機器人控制系統體系結構向具有開(kāi)放式結構演化的發(fā)展趨勢,開(kāi)發(fā)了一種基于模塊化思想的嵌入式控制系統。該控制系統由五大模塊組成,各個(gè)模塊對功能進(jìn)行統一封裝。人機交互模塊將控制系統以圖形界面方式呈現;文檔管理模塊提供基于SQL的文件操作和數據庫管理;動(dòng)畫(huà)演示模塊采用Open GL技術(shù)將機器人工作模型以及狀態(tài)信息輸出到屏幕;軌跡規劃模塊針對末端執行器的空間軌跡進(jìn)行軌跡規劃插補;串口通訊模塊提供底層傳輸功能。系統實(shí)現了裁剪性和模塊動(dòng)態(tài)加載的性能,能支持生產(chǎn)線(xiàn)之間的協(xié)調運作。針對四自由度碼垛機器人進(jìn)行應用實(shí)踐,試驗結果表明,該控制系統能大大縮短開(kāi)發(fā)周期,保證了一定的穩定性、可靠性和精確性。
關(guān)鍵詞:嵌入式系統; 模塊化; 動(dòng)畫(huà)演示; OpenGL;
Abstract:In order to adapt to the development trend of open structure evolution of robot control system architecture,a kind of embedded control system based on modular thought is developed. The system is composed of five modules with functional encapsulation. A graphical method demonstrating the control system is provided by the human-computer interaction module. The functions of file operations and database management are supported by the document management module. The robot working model and state information are shown on the screen by the Open GL technology,which is sustained by the animated demo module. The work that space trajectory of end actuator used for trajectory planning and interpolation is done by the trajectory planning module. The feature with underlying transport is afforded by the serial port communication module. Such system realized the performance of the cutting and dynamic module loading and support harmonious operations between production lines. Results of experiment on palletizing robot with four degrees of freedom indicate that development cycle can be greatly shorten by the control system,and stability,reliability,and accuracy can be guaranteed to some extent.
Keyword:embedded system; modularization; animation demonstration; OpenGL;
機器人的控制系統作為機器人的大腦,是決定機器人性能的主要因素,主要包括硬件系統和軟件系統[1] 。近幾年,歐美國家都在開(kāi)發(fā)開(kāi)放式機器人控制器[2] 。這類(lèi)控制系統是基于模塊化的,采用的是標準的總線(xiàn)結構,利用網(wǎng)絡(luò )進(jìn)行通訊。針對機器人控制器的研究已經(jīng)由硬件過(guò)渡到軟件、由具體控制器過(guò)渡到通用開(kāi)放式體系結構、由單獨控制過(guò)渡到多機協(xié)調控制。在開(kāi)放式控制器體系結構研究方面,有2種基本結構:一種是基于硬件層次劃分的結構;另一種是基于功能劃分的結構。后者是控制器體系結構的研究和發(fā)展方向[3-4] 。
隨著(zhù)計算機技術(shù)的變革,嵌入式系統及其應用作為當前工業(yè)機器人運動(dòng)控制研究的一個(gè)重要方向已越來(lái)越為人熟知。在工業(yè)機器的控制發(fā)展中,隨著(zhù)嵌入式控制器越來(lái)越多地被用于工業(yè)控制中,越來(lái)越多的廠(chǎng)家也開(kāi)始采用嵌入式處理器作為工業(yè)機器人控制器的主控制器。國內機器人控制器的研究與國外相比,還存在較大的差距。國內的嵌入式系統控制起步較晚,目前還沒(méi)有成熟應用。傳統的工業(yè)機器人系統,控制器多采用工業(yè)控制計算機(IPC),由于體積龐大、運行中不宜受振動(dòng)、功耗高等原因,已開(kāi)始被最近幾年急速發(fā)展的嵌入式系統(embedded system)所取代[5] 。本文則繼承模塊化思想開(kāi)發(fā)嵌入式控制系統,為現場(chǎng)投用奠定基礎。
1、機器人控制系統總體架構設計
控制系統總體架構決定了一個(gè)系統的實(shí)用性和可靠性,決定了系統的穩定性和拓展性。本文設計的機器人控制系統有人機交互模塊、文檔數據庫模塊、動(dòng)畫(huà)演示模塊、軌跡規劃模塊和串口通訊模塊等,各模塊分別實(shí)現諸多功能,有效提高了控制系統的實(shí)用性,如圖1所示。
人機交互模塊以友好的圖形化界面呈現給操作用戶(hù),是用戶(hù)和控制系統交互的直接唯一手段,也是控制系統中的核心模塊,提供諸多機器人的基本操作功能。文檔管理模塊提供文件操作和數據庫管理。動(dòng)畫(huà)演示模塊則是將機器人模型以三維虛擬實(shí)體以屏幕為媒介展現給操作用戶(hù),具有直觀(guān)性、便捷性等特點(diǎn)。軌跡規劃模塊則是內部集成模塊,是用戶(hù)無(wú)法看到的底層模塊之一。串口通信模塊支持RS485通信格式,是另一個(gè)底層模塊。

圖1 控制系統功能模塊
2、碼垛機器人運動(dòng)模型
四自由度碼垛機器人具有腰部回轉、水平橫移、垂直升降和腕部旋轉這4個(gè)自由度,各自由度之間兩兩獨立。為了分析控制系統的可靠性和穩定性,需要對機器人建立運動(dòng)學(xué)模型,也為之后的動(dòng)畫(huà)演示中的虛擬模型奠定演示基礎。
通常用D-H模型[6] 建立坐標系對機器人進(jìn)行運動(dòng)學(xué)分析。考慮到裝配誤差和加工誤差,垂直中心和水平中心之間會(huì )有偏移。綜合以上因素,機器人的D-H參數如表1所示。
表1 機器人連桿D-H參數
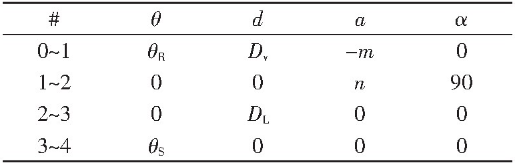
機器人末端執行器在基坐標系中的位姿相對應的齊次變換矩陣為

根據給定的θR、θS、Dv、DL、m和n等參數可以確定末端執行器具體位姿。
3、機器人控制系統圖形界面開(kāi)發(fā)
圖形界面(GUI)為用戶(hù)提供了良好的交互界面,直觀(guān)而方便。目前,市場(chǎng)上使用較多的界面設計軟件有Mini GUI、Open GUI、Micro Windows和Qt。而Qt憑借其跨平臺、集成C++類(lèi)、支持2D/3D渲染和高度的模塊化成為本課題的首選。
五大模塊為固定模塊,其余模塊添加需要借助工具欄中的“功能模塊”和“IO功能”協(xié)調控制。“功能模塊”實(shí)際上就是打開(kāi)用戶(hù)編寫(xiě)與調試完成后的應用模塊,如果是界面應用則會(huì )將之插入人機交互模塊的末端。“IO功能”則在系統內部提供8路輸出和8路輸入,每一路提供了輸入、輸出、控制等基本選項。1個(gè)功能模塊可以對應多個(gè)IO功能。
3.1、串口通信模塊
串口通信模塊是控制系統底層傳輸的實(shí)現模塊,本文采用RS485通訊接口,能支持主從式線(xiàn)路控制,即1臺主機對應多個(gè)機器人從機。RS485通訊作為通訊協(xié)議的一種,沿承了Modbus協(xié)議。Modbus通訊協(xié)議有ASCII和RTU 2種模式。RTU模式將發(fā)送數據的每一個(gè)字節視作2個(gè)十六進(jìn)制進(jìn)行發(fā)送,具有高效的傳輸速率和穩定性。
本文采用Linux系統的串口資源實(shí)現所需的串口功能。程序使用open函數以訪(fǎng)問(wèn)文件的方式打開(kāi)串口。
串口打開(kāi)之后,進(jìn)行相應初始化,就可以調用按照通訊幀格式進(jìn)行封裝的串口通訊模塊發(fā)送和接收數據。
3.2、人機交互模塊
人機交互模塊是整個(gè)控制系統的核心組成部分,具有手動(dòng)示教功能、自動(dòng)軌跡功能、參數設置功能和I/O控制功能。每一個(gè)功能都對應一個(gè)圖形界面,方便用戶(hù)操作和控制機器人。
3.2.1、手動(dòng)控制界面
手動(dòng)控制界面分為示教核心部分、基本功能部分和拓展部分三大板塊。示教核心部分主要實(shí)現了關(guān)節坐標和直角坐標的切換功能,“參考點(diǎn)”和“記錄”用于動(dòng)態(tài)設置參考點(diǎn),“目標位置”用于輸入坐標絕對增量值;基本功能部分實(shí)現了上電、復位、回零和停止等基本機器人控制功能;拓展功能部分真正意義上實(shí)現了逐點(diǎn)調試和記錄示教的類(lèi)似示教盒的功能。手動(dòng)控制界面如圖2所示。
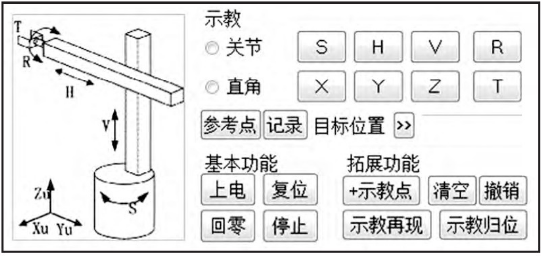
圖2 手動(dòng)控制界面
用戶(hù)可以通過(guò)示教核心部分對機器人的一個(gè)位姿進(jìn)行調試,如果滿(mǎn)意則可以通過(guò)“+示教點(diǎn)”按鈕提交該位姿,待所有位姿提交結束,可以借由“示教再現”和“示教歸位”觀(guān)看機器人位姿的連續變化。示教再現實(shí)現了機器人位姿按提交順序先后的運動(dòng)變化,示教歸位則相反。
3.2.2、自動(dòng)軌跡界面
自動(dòng)軌跡界面同手動(dòng)控制界面一樣也是控制系統的核心組成部分,該模塊和手動(dòng)控制模塊類(lèi)似,有所區別就是該模塊嵌入了三維動(dòng)畫(huà)模塊。自動(dòng)控制界面如圖3所示。
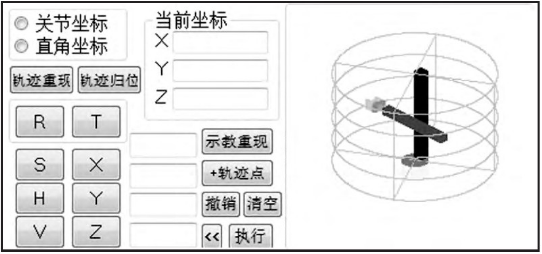
圖3 自動(dòng)軌跡界面
自動(dòng)控制模塊添加了當前坐標顯示,用于顯示當前末端抓手相對于基坐標系的位置,其余功能和手動(dòng)控制模塊類(lèi)似。該模塊和手動(dòng)控制模塊中的位姿數據都將保存在數據庫中,并與之同步。
3.3、文檔數據模塊
控制系統應當提供文件操作以支持系統外的編程數據和數據庫操作以支持系統在線(xiàn)編程,方便示教點(diǎn)和軌跡點(diǎn)的保存和管理。Qt為數據庫訪(fǎng)問(wèn)提供的Qt Sql模塊實(shí)現了數據庫和Qt應用程序的無(wú)縫集成,同時(shí)為開(kāi)發(fā)人員提供了一套與平臺具體所用數據庫均無(wú)關(guān)的調用接口。使用SQL語(yǔ)言對自動(dòng)軌跡界面進(jìn)行數據庫補充開(kāi)發(fā),如圖4所示。
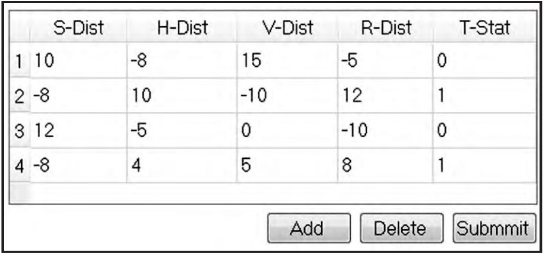
圖4 自動(dòng)軌跡數據庫
自動(dòng)控制數據庫界面抬頭部分分別對應機器人的各個(gè)關(guān)節,左側數字則代表錄入的關(guān)節位姿順序,中間的數值則代表各關(guān)節運動(dòng)的絕對增量值。下面部分則提供了數據庫的添加、刪除和提交功能,這些功能等同于之前介紹的相應功能。至于手動(dòng)控制數據庫則雷同,在此不作贅述。
3.4、動(dòng)畫(huà)演示模塊
動(dòng)畫(huà)演示模塊是整個(gè)控制系統的核心組成模塊,主要實(shí)現同步播放機器人運動(dòng)軌跡的功能。通過(guò)位置交互接口模塊,讀取伺服驅動(dòng)器中描述編碼器數值的寄存器以獲得機器人每時(shí)刻的位置。然后,控制系統會(huì )將機器人位姿以圖像動(dòng)畫(huà)的形式播放出來(lái)。本文借助Open GL實(shí)現動(dòng)畫(huà)這一功能。Open GL[7] 應用程序編程接口(API),很接近底層硬件,使得使用者無(wú)需考慮硬件細節便可直接編寫(xiě)屬于用戶(hù)個(gè)人的圖形程序。
圖3中柱圖表示被控對象的工作范圍,當運動(dòng)超出此工作范圍時(shí),會(huì )警示操作者。本文將實(shí)現好的動(dòng)畫(huà)演示模塊和自動(dòng)軌跡模塊集成在一起,為了更加方便用戶(hù)觀(guān)察,還設置了只要機器人位姿發(fā)生變化控制系統就將交互界面切換到動(dòng)畫(huà)演示界面的機制。
3.5、軌跡規劃模塊
軌跡規劃模塊負責對給定的示教點(diǎn)和軌跡點(diǎn)所形成的空間軌跡進(jìn)行軌跡規劃和插補,以使得機器人能夠更為快速準確地達到期望位姿,提高控制系統的可靠性和精確性。軌跡規劃分為笛卡爾空間軌跡規劃和關(guān)節空間軌跡規劃。對一般機器人而言,更加關(guān)注的是末端執行器在空間的運動(dòng)軌跡,即采用笛卡爾空間軌跡描述的末端執行器的路徑。為了保證機械末端抓手運動(dòng)平滑,本文采用速度對時(shí)間的三次多項式軌跡規劃。圖5給出了末端執行器期望位移s(t)-速度v(t)-加速度a(t)曲線(xiàn)。
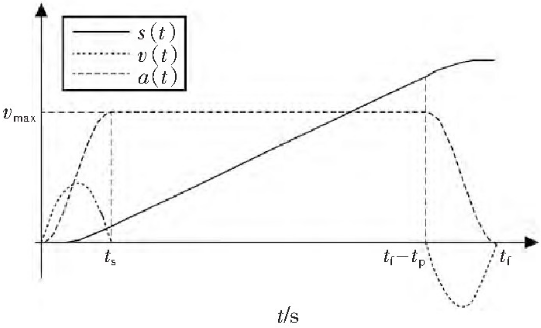
圖5 末端期望路徑曲線(xiàn)
由圖5可以看出,機器人末端空間直線(xiàn)段運動(dòng)有加速、勻速、和減速3個(gè)階段,給出如下速度表達式:

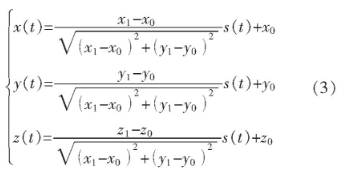
經(jīng)過(guò)計算,可以獲得末端執行器的坐標表達式:
4、機器人控制系統測試
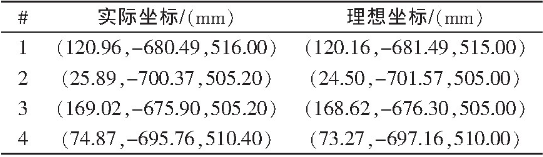
針對四自由度的碼垛機器人對控制系統進(jìn)行測試(測試平臺為ARM),這里只對自由軌跡模塊進(jìn)行測試,根據碼垛機器人的參數可獲得末端執行器初始坐標為(0,-700,500),單位為mm。
根據圖4給出運動(dòng)軌跡中4個(gè)點(diǎn)的運動(dòng)坐標如表2所示。通過(guò)測試可以知道該控制系統基本上能將坐標誤差控制在1.5 mm以?xún)?大致符合碼垛機器人的特性所需要的精度要求。
表2 坐標對比
5、結語(yǔ)
針對當今機器人控制系統結構體系的演化,本文所實(shí)現的控制系統符合嵌入式和模塊化的潮流趨勢,在四自由度碼垛機器人上取得了一定成效,保證了穩定性和可靠性,精確性具有良好體現。其模塊化的設計思想能大大縮短開(kāi)發(fā)周期,為之后的模塊組建提供了良好的開(kāi)發(fā)環(huán)境。本文的創(chuàng )新點(diǎn)就是實(shí)現了機器人工作狀態(tài)的動(dòng)畫(huà)展示,將反饋的位姿狀態(tài)信息直接呈現給用戶(hù),能實(shí)現非現場(chǎng)監控等實(shí)際需求。其次,還提供了機器人工作軌跡的數據庫管理,方便用戶(hù)調試和管理。而IO功能的拓展則實(shí)現了生產(chǎn)線(xiàn)之間的同步運作。最為關(guān)鍵的則是提供了硬件無(wú)關(guān)和軟件無(wú)關(guān)的模塊動(dòng)態(tài)加載方案,真正意義上實(shí)現了控制系統的拓展性和裁剪性。
雖然作者針對控制系統的開(kāi)發(fā)做了大量研究工作,并取得了些許成效,但是仍有不足,需在今后的研究中完善動(dòng)畫(huà)演示模塊以支持外部導入模型、支持硬件拓展等功能,進(jìn)一步提高控制系統的兼容性和實(shí)用性。
參考文獻
[1]范永,譚民.機器人控制器現狀和展望[J].機器人,1999,21(1):75-80.
[2]潘煉東.開(kāi)放式機器人控制器及相關(guān)技術(shù)研究[D].武漢:華中科技大學(xué),2007.
[3]Faina A,Bellas F,Souto D,et al.Towards an evolutionary design of modular robots for industry[C]//La Palma,Canary Islands,Spain:4th International Work-conference on the Interplay between Natural and Artificial Computation,2011.
[4]Murata S,Yoshida E,Kamimura A,et al.M-TRAN:self-reconfigurable modular robotic sys tem[J].IEEE/ASME Transactions on Mechatronics,2002,7(4):431-441.
[5]MATSUO Takayuki,ISHII Kazuo.Neural Oscillator Based Motion Control System for Snake-like Robot[C]//Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies,Tokyo,2007:397-402.
[6]施文龍.六軸工業(yè)機器人控制系統的研究與實(shí)現[D].武漢:武漢科技大學(xué),2015.
[7]王晟.基于OPENGL的碼垛機器人離線(xiàn)編程仿真系統[D].武漢:武漢科技大學(xué),2013.