24小時(shí)論文定制熱線(xiàn)
24小時(shí)論文定制熱線(xiàn)
摘 要
隨著(zhù)科學(xué)技術(shù)的不斷發(fā)展,無(wú)線(xiàn)遙控技術(shù)在工業(yè)領(lǐng)域得到了越來(lái)越多的應用。在很多工業(yè)場(chǎng)合,由于作業(yè)環(huán)境存在著(zhù)不可避免的人身傷害因素,很多企業(yè)利用無(wú)線(xiàn)遙控技術(shù)來(lái)改善現場(chǎng)人員的作業(yè)條件,同時(shí)也有效的解放勞動(dòng)力,提高了勞動(dòng)生產(chǎn)效率。無(wú)線(xiàn)遙控技術(shù)擺脫了傳統的工業(yè)布線(xiàn)控制方式,有效的降低了設備投資成本,同時(shí)也降低了設各后期維護費用。
本文以冶金鐵路運輸斤業(yè)為背景,經(jīng)過(guò)對機車(chē)控制電路結構的研究,在原有機車(chē)電氣部件的基礎上,設計了模糊控制的單片機機車(chē)無(wú)線(xiàn)遙控系統,實(shí)現了機車(chē)的恒速控制和司機遠程遙控機車(chē)的功能。該系統由機車(chē)司機遙控器(遙控端)和車(chē)載主機(主控端)兩部分組成。WSTM32F107VC作為核也控制器,以工業(yè)級的BY-602數傳電臺作為無(wú)線(xiàn)通信模塊。巧遙控端設計了按鍵信息采集及語(yǔ)音提醒電路,在主控端采用查表法來(lái)實(shí)現樸糊控制,并設計了機車(chē)控制驅動(dòng)電路和故障提示電路,集成了RS485通信接口,便于實(shí)現累統與計算機通信。在KeilMDK環(huán)境下采用C語(yǔ)言和匯編語(yǔ)言開(kāi)發(fā)完成了遙控端和主控端的MCU程序。
本文詳細介紹了項目設計中的系統分析、模糊控制器設計、硬件結構及軟件的設計流程。通過(guò)對該系統進(jìn)行工況條件下的調試,分析了系統存在的不足,并提出了改進(jìn)意見(jiàn)。
本系統經(jīng)測試運斤穩定,安全可靠,選用器件廉價(jià),維護成本低。遙控器使用操作方便,滿(mǎn)足了現場(chǎng)使用需求。
關(guān)鍵詞:無(wú)線(xiàn)遙控;摸糊控制;單片機
Abstract
Withthe continuous development of science and teechnology,wireless remote control technology in the industrial field has been more and more applications popular.in many industries,due to the existence of the operating environment of the inevitable personal injury factors, many companies use wireless remote control technology to improve the operating conditions of the scene,and it can also liberate labor effectively, improve the productivity. Wireless remote control technology has got rid of the traditional way of industrial wiring control,which can effectively i^educe the cost of investment and equipment msmtenancs.
in this paper,based on the research of the railway transportation industry and the structure of the locomotive control circuit, a wireless remo1:e control system based on the original electric locomotive is designed, the function of the constant speed control and the remcrte control locomotive are realized in this system. The system is compothd of two parts of the locomotive driveris remote COntrol (remote control) and the vehicle host (Master). Taking STM32F107VC as the core controller, the industry level BY-602 digital communication module is used as the wireless communication module.In the remo1:e control,the key information acquisition and voice alarm circuit are designed. The fuzzy control is realized by using the look-up table method in the main control terminal,and the locomotive control driving circuit and the fault circuit are designed. The RS485 communication interface is integrated, which is convenient for the communication between the system and the computer.lile Keil MDK environment,the MCU programs of the remcrte control and the main control are complethd by using C and assembly language.
in this paper,the system analysis,fuzzy controller design,hardware structure and software design now of the project design are introduced in detail. By debugging the system under the real condition, the disadvantage is analyzed, and the improvement suggestions are discussed.
The system is stable, safe and reliable, meanwhile it is cheap and the maintenance cost is low.The remoth control operation is convenient, and it can meet the needs of the scene.
Key Words:Wireless Tele-control; Fuzzy Control; Microcontroller
根據中國鋼鐵協(xié)會(huì )的數據統計,2014年我國鋼鐵行業(yè)年粗鋼產(chǎn)量已經(jīng)這到8迄噸。據此推算,僅高濕鐵水運輸一項業(yè)務(wù)年運輸量就十分巨大。國內大部分鋼鐵企業(yè)在鐵水運輸達一環(huán)節依然采用較為傳統的運輸方式——鐵路運輸。傳統的鐵路調車(chē)作業(yè)每個(gè)調車(chē)組一般配置3人,1名司機(主要負責操繳機車(chē))、1名副司機(負責反方向了望,輔助司機作業(yè))、1名連接員(負責車(chē)輛的摘鉤,解風(fēng)管)。3人相互配合完成調車(chē)作業(yè)。由于鐵路運輸是冶煉過(guò)程中的一個(gè)重要物流環(huán)節,24小時(shí)不中斷作業(yè),一般的雨雪天氣很難對鐵路調車(chē)作業(yè)造成影響,連接員經(jīng)常頂風(fēng)冒雪進(jìn)行室外作業(yè),并且冶金企業(yè)的高溫髙粉塵、高噪音、有毒有害氣體較一般的露天環(huán)境對人的危害更大。送也導致傳統的冶金企業(yè)鐵路調車(chē)作業(yè)一直存在著(zhù)作業(yè)環(huán)境惡劣,浪費人為物力,安全性低的缺點(diǎn)。
國外的機車(chē)遙控系統起步時(shí)間較早,發(fā)展迅速,功能上也從開(kāi)始的單功能單控制向多功能多控制方向發(fā)展。目前,國外的機車(chē)遙控技術(shù)已經(jīng)發(fā)展的較為成熟,且形成了以GE公司和CANAC公司為代表的機車(chē)無(wú)線(xiàn)控制系統供應商。他們的產(chǎn)品己經(jīng)大量的應用在發(fā)達國家的鐵路運輸行業(yè),取得了很大的業(yè)績(jì)。
以美國GE公司的產(chǎn)品為例,其化車(chē)猩控產(chǎn)品從開(kāi)發(fā)之初至今已有半世紀之久。產(chǎn)品主要應用在大規模的鐵路調車(chē)場(chǎng)作業(yè)。其系統由操作單元、機車(chē)控制單元和無(wú)線(xiàn)網(wǎng)絡(luò )所組成。系統使用簡(jiǎn)單,操作方便,對機車(chē)控制精確。系統設計內置司機操作記錄和故障提醒功能,并可W通過(guò)鐵路站場(chǎng)上布置的無(wú)線(xiàn)網(wǎng)絡(luò )向控制中也進(jìn)行僖息傳遞,便于事故后分析原因。
國內的機車(chē)遙控系統起步較晚,這與國內的人力資源豐富,人工成本較低的因素有關(guān)。隨著(zhù)這些年人工成本的不斷増加,機車(chē)遙控系統這種可起到減員增敗提高人員安全防護的自動(dòng)化系統已經(jīng)逐步被國內大中型企業(yè)所重視。國內最早應用機車(chē)無(wú)線(xiàn)遙控系統的企業(yè)是上海寶鋼集團公司。上世紀90年代,該公司從曰本進(jìn)曰無(wú)線(xiàn)電遙控機車(chē)用于高爐下的鐵路調車(chē)作業(yè)。后期由于成本原因對機車(chē)進(jìn)行國產(chǎn)化改造,降低了設備運行成本。
2006年由南車(chē)集團公司與北京交通大學(xué)共同設計開(kāi)發(fā)的機車(chē)遙控系統在萊憲鋼廠(chǎng)通過(guò)試驗并驗收裝車(chē)使用。該套系統采用獨立設計的方式,可與機車(chē)分離以適應多種機車(chē)車(chē)型。系統分為司機手持機和車(chē)載主機兩個(gè)部分,實(shí)現司機遠程操作機車(chē)的功能。系統在設計時(shí)充分考慮了可靠性和安全性的問(wèn)題,引入了鐵路設備通用的"故障一安全"原則并設計了多種兀余措施。同時(shí)在一些細節部分,如遙控器的電池電量監測及防傾倒電路的設計都更加的合理及人性化。
近年來(lái),國內機車(chē)遙控系統的發(fā)展更注重多功能和網(wǎng)絡(luò )化兩個(gè)方面。通過(guò)在全鐵路站場(chǎng)布局無(wú)線(xiàn)網(wǎng)絡(luò ),實(shí)施無(wú)線(xiàn)信號全覆蓋,可將車(chē)站調度室內值班人員發(fā)布的操作命令傳送到機車(chē)上。車(chē)載主機接收到控制命令后,傳送給機車(chē)的執行部分。同時(shí),機車(chē)運行速度、柴油機油壓、機車(chē)冷卻水溫、機車(chē)周?chē)h(huán)境的圖像采集信號等相關(guān)信息可W通過(guò)網(wǎng)絡(luò )實(shí)時(shí)傳遞給車(chē)站內的操作人員。這樣機車(chē)司機可以足不出戶(hù)"的完成機車(chē)操作,最大限度改善司機工作環(huán)境,確保人身安全。同時(shí)也易于實(shí)現對多臺機車(chē)的集中指揮,相互協(xié)作完成復雜的運輸作業(yè)。
模糊控制單片機機車(chē)無(wú)線(xiàn)遙控系統開(kāi)發(fā):
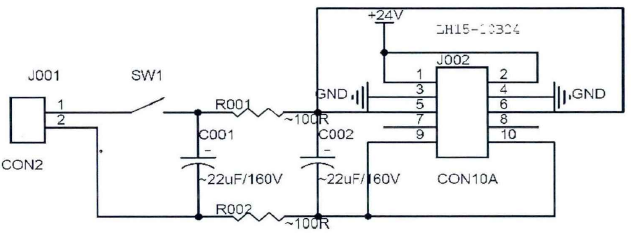
110V轉24V電源電路
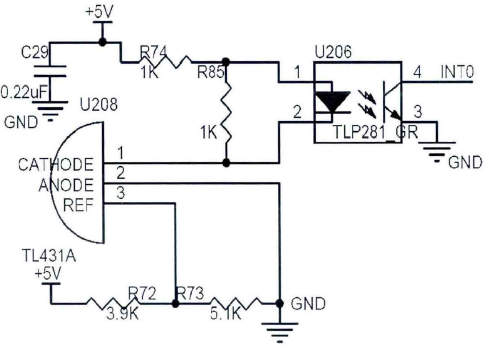
電量監控電路
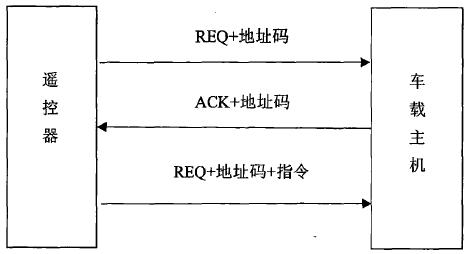
無(wú)線(xiàn)通信過(guò)程
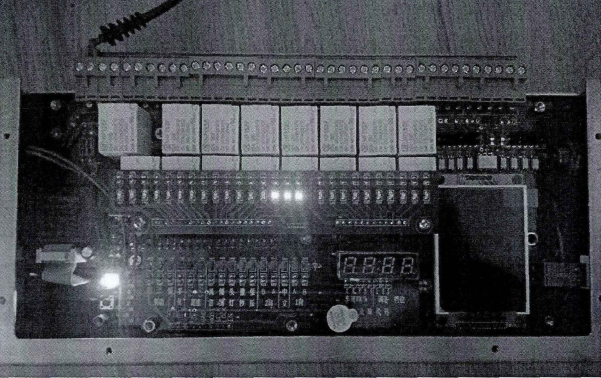
系統實(shí)物
目 錄
摘 要
Abstract
1 緒論
1.1 研究背景及意義
1.2 國內外研究現狀
1.3 模糊控制技術(shù)的發(fā)展及優(yōu)勢
1.4 本課題主要完成的工作
2 系統分析與總體設計
2.1 需求分析
2.2 總體設計
3 機車(chē)恒速控制系統設計
3.1 機車(chē)恒速控制系統的結構設計
3.2 模糊控制器的設計
3.2.1 機車(chē)速度偏差模糊化
3.2.2 機車(chē)加速度模糊化
3.2.3 機車(chē)柴油機轉速偏差模糊化
3.2.4 系統模糊控制規則
3.3 機車(chē)恒速控制系統模型的Matlab/Simulink仿真
3.4 模糊控制算法的實(shí)現
4 系統硬件的設計
4.1 系統硬件的總體結構
4.2 控制器的選擇
4.3 系統電源電路設計
4.4 無(wú)線(xiàn)通信接口設計
4.5 機車(chē)控制電踞設計
4.6 機車(chē)狀態(tài)采集電路設計
4.7 系統時(shí)鐘電路設計
4.8 電池電量監控電路設計
4.9 顯示與存儲電路設計
4.10 語(yǔ)音報警電路設計
5 系統軟件設計
5.1 車(chē)載主機主程序設升
5.2 無(wú)線(xiàn)通信模式設計
5.3 機車(chē)主機初始化子程序設計
5.4 機車(chē)控制子程序設汁
5.5 遙控器主程序設計
6 系統實(shí)驗調試及安全性設計總結
6.1 系統實(shí)驗與調試
6.2 系統的安全性設計總結
結論
參考文獻
致謝
(如您需要查看本篇畢業(yè)設計全文,請您聯(lián)系客服索取)